拖拉机液压系统控制装置
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及一种农业机械领域,具体说是一种拖拉机液压系统控制装置。
背景技术
拖拉机作为应用广泛的农机,在我国农业生产中发挥重要的作用。拖拉机的液压悬挂系统在农机作业中,必须频繁调整液压悬挂系统工作来控制安装的农机具。拖拉机液压悬挂系统有两种方式。一种是通过液压分配器,通过操纵杆上下扳动实现对液压缸的控制。其缺点是液压杆是一个中立位置,用手扳动时液压缸才动作,当松开手时液压缸就动作,所以液压缸不能和操纵杆保持位置同步。同时使驾驶员一只手控制方向盘,另一只手还要控制操纵杆,导致驾驶员的频繁操作。另一种是通过驾驶室内的液压分配器操纵手柄,改变手柄位置只能单向提升液压缸,但液压缸下降是依靠农机具的自重下降的,即液压缸下降没有强压装置,影响了拖拉机的使用性能。综合分析上述技术,可归纳为强压型和非强压型。强压型:有强制提升下降功能,无精确控制提升下降功能,操控性、维护性复杂。非强压型:有强制提升功能,无强制下降功能,有精确控制提升功能,无精确控制下降功能,操控性简单,维护性复杂。
发明内容
鉴于上述现状,本发明提供了一种拖拉机液压系统控制装置,使其具有强制、精确控制液压缸的伸缩及操控性能、维护性简单的特点。
本发明的技术解决方案是:一种拖拉机液压系统控制装置,包括安装在机架上的液压系统,该液压系统中的液压缸与一个连杆铰接,通过连杆上的铰轴引出机架的两侧,在两侧引出的铰轴上对称装有提升臂;其中在所述提升臂一侧安装有液压系统的升降控制机构,以及浮动下降控制机构;
升降控制机构,包括轴销及其上安装的限位触盘、行程开关转盘,该限位触盘通过轴销与提升臂连接,行程开关转盘通过拉线与手柄操纵盘连接,所述行程开关转盘设有两个行程开关与液压系统中所对应的液压电磁阀、继电器、电磁溢流阀电连接,通过推或拉动手柄操纵盘控制行程开关转盘转动至任一位置停止,启动液压缸伸缩作用提升臂及限位触盘向上下转动,至限位触盘上的触碰点与行程开关转盘接触或脱开,控制液压缸伸缩停止;
浮动下降控制机构,包括浮动行程开关, 3#行程开关与电磁液压阀、继电器电连接,通过浮动行程开关与行程开关转盘上的触销接触时,控制液压缸泄压缩回。因此,通过手柄操纵盘拉线控制行程开关转盘、限位触盘彼此间的相对转动改变位置接触,来控制行程开关转盘、液压电磁阀、继电器电的导通或断电,实现对拖拉机液压缸的伸缩位置和手柄操纵盘转动位置保持同步位移。
本发明中,所述限位触盘,包括圆形盘及带有的中心轴孔,沿径向有一个凸凹面形成的限位区间段,在所述凸凹面的过渡边缘形成一个行程开关转盘得电或断电的触碰点。
本发明中,所述行程开关转盘,包括圆形盘及带有的中心轴孔,其上设有1#、2#行程开关及触头、第二拉线连接销及浮动触头。因此,通过行程开关转盘上的触头与3#行程开关的触杆接触得电后打开2#溢流阀使液压缸泄压,依靠提升臂自重浮动下降。
本发明中,所述手柄操纵盘,包括圆形盘及带有的中心轴孔,其上固定手柄、第一拉线连接销、拉线导向架,所述圆形盘通过中心轴孔与固定座上的转轴连接,通过固定座上的螺杆安装在驾驶室内。
本发明中,所述行程开关与继电器、液压电磁阀、电磁溢流阀、电源连接电路,该连接电路包括1#继电器J1、2#继电器J2、3#继电器J3;1#继电器J1有两个常开触点J1-1、J1-2和1#行程开关的常闭触点J1-3,其中1#继电器J1的常开触点J1-1一端接电源,另一端接上升电磁溢流阀线圈;常开触点J1-2一端连接常开触点J1-1接电源,另一端接上升液压电磁阀线圈;2#继电器J2两个常开触点J2-1、J2-2和1#行程开关的常闭触点J2-3,其中2#继电器J2的常开触点J2-1一端接电源,另一端接下降电磁溢流阀线圈;常开触点J2-2一端连接常开触点J2-1接电源,另一端接下降液压电磁阀线圈;3#继电器J3有一个常开触点J3-1,该常开触点J3-1一端接电源,另一端接下降液压电磁阀线圈;所述1#继电器J1一端及电源,另一端接1#行程开关的常闭触点J1-3一端,常闭触点J1-3分别与2#行程开关、3#行程开关的常闭触点J2-3、常闭触点J3-2一端连接;所述2#继电器一端接电源,另一端接2#行程开关的常闭触点J2-3一端,常闭触点J2-3另一端分别与常闭触点J1-3、常闭触点J3-2一端连接;所述3#继电器一端接电源,另一端接3#行程开关的常闭触点J3-2一端,常闭触点J3-2另一端就电源。
本发明所述的液压系统,包括油泵、双向液压缸、继电器、液压电磁阀、电磁溢流阀、油箱。
本发明的有益效果是:通过操纵手柄控制盘拉线控制行程开关转盘及其上的两个程开关相对在限位触盘的凸凹面区间段改变位置,来控制两个行程开关的互为导通或切断,让液压电磁阀动作,实现对拖拉机液压缸的位置和手柄控制盘转动位置保持同步动作。因此,具有强制、精确控制升降功能,操控性、维护性简单的特点。
附图说明
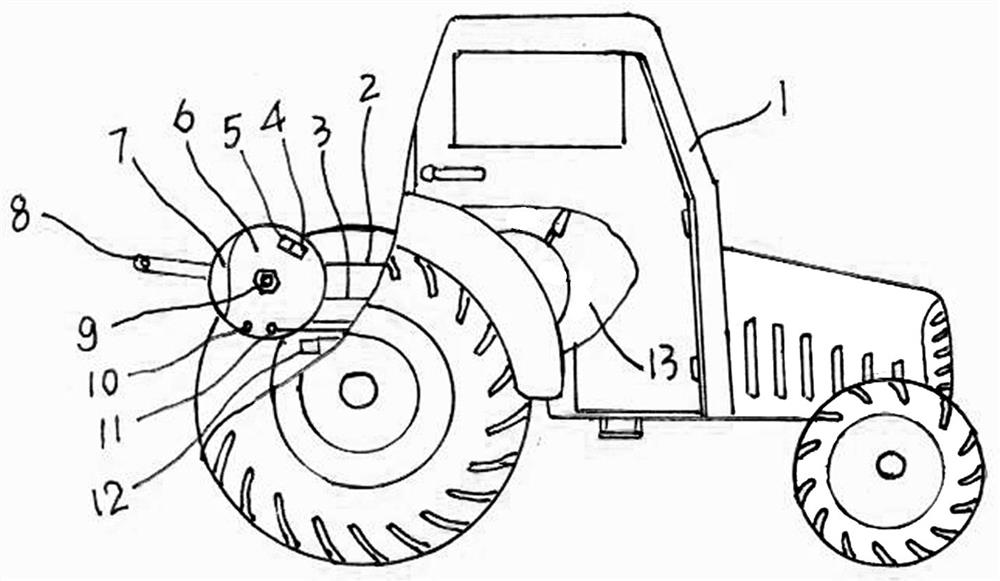
图1是本发明的示意图;
图2是图1升降控制机构及浮动下降控制机构示意图;
图3是图2的俯视图;
图4是图1升降控制机构分解示意图;
图5是图1行程开关控制电路原理图;
图6是图1液压系统连接示意图。
具体实施方式
下面将结合分体实施例对本发明作进一步说明。
见图1至图3所示的一种拖拉机液压系统控制装置,包括安装在拖拉机1后部机架2上的液压系统,该液压系统中的液压缸3活塞杆与一个连杆14铰接,通过连杆14上的铰轴23引出机架2的两侧,在机架2两侧引出的铰轴23上对称装有提升臂8。本实施例中,在所述提升臂8一侧安装有液压系统的升降控制机构,以及安装机架2上的浮动下降控制机构。本实施例所述升降控制机构,包括安装在轴销9上的限位触盘7、行程开关转盘6,该限位触盘7通过轴销9与提升臂8连接,行程开关转盘6通过拉线15与手柄操纵盘13连接。所述行程开关转盘6设有1#行程开关4、2#行程开关5与液压系统中所对应设置的液压电磁阀、继电器、电磁溢流阀(图中未示意)电连接,通过推或拉动手柄操纵盘13控制行程开关转盘6转动至任一位置停止(相对限位触盘7),启动液压缸3的活塞杆伸缩,作用提升臂8及限位触盘7向上下转动,至限位触盘7上的触碰点a与行程开关转盘6上的1#行程开关4或是2#行程开关5的触头接触,控制液压缸伸缩停止。本实施例所述浮动下降控制机构,包括安装在机架上的3#行程开关12, 3#行程开关12与液压电磁阀、继电器电连接,通过3#行程开关12与行程开关转盘6上的触销10接触时,强制控制液压缸泄压缩回。因此,通过手柄操纵盘13上的拉线15控制行程开关转盘6、限位触盘7彼此间的相对转动改变位置接触,来控制行程开关转盘6、液压电磁阀、继电器电的导通或断电,实现对拖拉机1液压缸3的伸缩位置和手柄操纵盘13转动位置保持同步位移。本实施例中,所述限位触盘7,包括圆形盘及带有的中心轴孔,沿径向有一个凸凹面形成的限位区间段,在所述凸凹面限位区间段的过渡边缘形成一个控制行程开关转盘6得电或断电的触碰点a。本实施例中所述行程开关转盘6,包括圆形盘及带有的中心轴孔,其上设有1#、2#行程开关及触头、第二拉线连接销11及浮动触头10。因此,通过行程开关转盘6上的浮动触头10与3#行程开关12的触杆接触得电后打开2#溢流阀使液压缸3泄压,提升臂8依靠自重浮动下降。本实施例中所述手柄操纵盘13,包括圆形盘18及带有的中心轴孔,其上固定手柄19、第一拉线连接销17、拉线导向架16,所述圆形盘18通过中心轴孔与固定座20上的定轴24固定连接,通过固定座20上的螺杆安装在拖拉机1的驾驶室内。
本实施例中,拉线15一端与手柄操纵盘18上的第一拉线连接销17连接之后穿过拉线导向架16与行程开关转盘6上的第二拉线连接销11连接。作用手柄19通过拉线15作用行程开关转盘6按顺、逆方向转动。
见图5给出了行程开关与继电器、液压电磁阀、电磁溢流阀、电源连接电路原理图。该连接电路包括1#继电器J1、2#继电器J2、3#继电器J3;1#继电器J1有两个常开触点J1-1、J1-2和1#行程开关的常闭触点J1-3,其中1#继电器J1的常开触点J1-1一端接电源,另一端接上升电磁溢流阀线圈;常开触点J1-2一端连接常开触点J1-1接电源,另一端接上升液压电磁阀线圈;2#继电器J2两个常开触点J2-1、J2-2和1#行程开关的常闭触点J2-3,其中2#继电器J2的常开触点J2-1一端接电源,另一端接下降电磁溢流阀线圈;常开触点J2-2一端连接常开触点J2-1接电源,另一端接下降液压电磁阀线圈;3#继电器J3有一个常开触点J3-1,该常开触点J3-1一端接电源,另一端接下降液压电磁阀线圈;所述1#继电器J1一端及电源,另一端接1#行程开关的常闭触点J1-3一端,常闭触点J1-3分别与2#行程开关、3#行程开关的常闭触点J2-3、常闭触点J3-2一端连接;所述2#继电器一端接电源,另一端接2#行程开关的常闭触点J2-3一端,常闭触点J2-3另一端分别与常闭触点J1-3、常闭触点J3-2一端连接;所述3#继电器一端接电源,另一端接3#行程开关的常闭触点J3-2一端,常闭触点J3-2另一端就电源。
见图6液压系统连接示意图。包括液压电磁阀C,该液压电磁阀C分别与1#液压电磁阀线圈D、2#液压电磁阀线圈E、1#、2#电磁溢流阀线圈F连接,其中液压电磁阀C上有A0口、B0口、供油口P、回油口T,所述A0口、B0口分别与液压缸3的A腔和B腔连接。
本实施例结合图5、图6描述具体工作过程:
一、上升至上升停止过程:
当作用操纵手柄转盘13上的手柄19向前推动时,通过拉线15带动行程开关转盘6顺时方向转动,1#行程开关转盘6上的触头处于限位转盘7的凹面位置,1#行程开关转盘6的触头不与限位转盘7的凸凹面接触, 1#、2#继电器的常闭触点J1-3、J2-3处于导通状态,此时1#继电器J1、1#行程开关4的常闭触点得电,使1#继电器J1的两个常开触点J1-1、J1-2闭合得电,分别使1#电磁溢流阀线圈F和1#液压电磁阀线圈D得电,液压系统形成正常工作压力,此时液压电磁阀C的供油口P经过换向和液压电磁阀C的A0口相通,电磁液压阀C的回油口T和B0口相通,经液压泵供给的压力油经液压电磁阀C的供油口P通过A0口进入液压油缸A腔,液压油缸B腔油通过液压电磁阀C的B0口流回到油箱,液压缸3的活塞杆伸出,作用控制图4中的提升臂向上转动(上升)。提升臂向上转动的同时限位触盘7随之转动,当限位触盘7上的凸凹面过渡边缘触碰点a到行程开关转盘6上 的1#行程开关4触头时, 1#行程开关4的常闭触点断开,1#继电器器J1断电的同时,1#电磁溢流阀线圈F、1#液压电磁阀线圈D断电,1#液压电磁阀回到中立位置,液压电磁阀C的A0口和B0口关闭,液压缸3停止动作并保持不动,液压油从液压电磁阀C的A0口 通过断电状态下的1#电磁溢流阀油路经过电磁液压阀C的回油口T流回到油箱。上升时,2#行程开关不工作。
二、强制下降停止过程:
当操纵手柄转盘13上的手柄19向后拉动时,通过拉线15带动行程开关转盘6逆时方向转动,2#行程开关5的触头处于限位触盘7的凸面位置,2#行程开关5的触头压在凸凹的限位触盘7上, 1#、2#继电器的常开触点闭合导通,此时2#继电器J2、2#继电器的常开触点闭合得电,2#继电器J2闭合, 2#电磁溢流阀线圈F和2#液压电磁阀线圈E得电,液压系统处于正常工作压力。此时液压电磁阀C的供油口P经过1#液压电磁阀和液压电磁阀C的B0口相通,回油口T和A0口相通,通过液压泵供给的液压油,经液压电磁阀C的供油口P通过B0口进入液压油缸B腔,经液压油缸A腔的油通过液压电磁阀C的A0口经回油口T流回到油箱,液压油缸活塞杆缩回,控制提升臂向下转动(下降)。当提升臂上的限位触盘7上的凸凹面过渡触碰点a转动至与行程开关转盘6上的触头位置时,2#行程开关5的触头开使放松达到一定程度时, 2#行程开关5上的两个常开触点J2-1、J2-2断开, 2#继电器J2断电,此时2#继电器d的常闭触点J2-3断开,2#电磁溢流阀线圈F和液压电磁阀C断电,2#液压电磁阀回到中立位置,液压电磁阀组C的A0口和B0口关闭,液压油3缸停止下降动作,并保持不动,液压油从液压电磁阀C的供油口P通过2#液压电磁阀断电情况下,通过2#电磁溢流阀的油路经过回油口T流回到油箱。下降时,1#行程开关不工作。
三、浮动工况:
当操作纵手柄19向下拉动到最低位置时,通过拉线15带动行程开关转盘6逆时方向旋转,并触发了3#行程开关12上的触杆并使3#行程开关12动作, 3#行程开关12的常闭触点J3-2断开,常开触点J3-1闭合导通,常闭触点J3-2断开后切断了1#、2#行程开关4、5的电源, 1#、2#行程开关4、5不工作,常开触点J1-1、J1-2、J2-1、J2-2闭合导通后,使3#继电器线圈12得电, 3#继电器J3的常闭触点J3-3闭合导通,使液压电磁阀得电工作,此时因为1#、2#电磁溢流阀断电,所以液压系统无压力,液压电磁阀C的供油口P通过电磁溢流阀和回油口T连通,供油口P通过下降液压电磁阀和A0口相通,B0口和回油口T相通,液压缸A0口和B0口都处于无油压连通状态,所以液压缸3活塞杆可以根据所受外力情况而自动伸长或收缩,即导致与液压缸3活塞杆连接的提升臂自动伸长或收缩,此时就是拖拉机液压系统的浮动功能。
实施本发明的特点是采用主动转动的动态行程开关,控制液压系统的油缸作用提升臂及其上的限位触盘随之同向转动至与行程开关接触,来调整控制提升臂的上下摆动(升降)。
行程开关说明:
1#、2#行程开关属同一型号LXW5-11Q1的开关。
1#、2#行程开关动作时间有一点时间差,提升时1#行程开关先动作;下降时2#行程开关先动作, 1#、2#行程开关动作时间差的位置就是所控制液压缸的中立位置。
- 拖拉机液压系统控制装置
- 拖拉机共用油用液压系统及拖拉机