一种固晶机及固晶方法
文献发布时间:2023-06-19 19:32:07
技术领域
本发明涉及固晶设备技术领域,尤其是涉及一种固晶机及固晶方法。
技术背景
我国半导体产业正在飞速发展,而封装技术则是影响半导体产业发展的非常重要的一个环节。半导体的封装技术的优劣是至关重要的竞争因素,与市场上大部分的半导体机械设备相比较,固晶机的固晶精度、速度、稳定性等有着明显的优势。
现有的固定方式多是通过物理层面的点胶技术,先通过点胶机给引线框上的固晶位置点定量银浆胶,而后将取出的晶圆贴于胶上完成元器件的连接,然而点胶过程工艺是影响最终效果的关键因素,成产中极易产生一些工艺缺陷:胶点大小不合格,拉丝,胶水浸染焊盘,固化强度不好容易掉片等;
现有的固晶机固晶过程,一般是通过摇臂与吸嘴将晶圆上的芯片固定在基板或者引线框上的固晶位置上(CN202210772025.8),首先是摇臂驱使吸嘴向下运动,以吸取晶圆上的芯片,之后,摇臂摆动、带动吸嘴转动(摇臂摆动驱动吸嘴转动的同时,吸嘴也在做上升运动),将芯片送至引线框的上方,再是摇臂驱使吸嘴向下运动、将芯片固定于引线框上;一般地,摇臂摆动一次的时间在150ms250ms内,且在吸取芯片或者将芯片固定于引线框上时,吸嘴需要停止不动十几毫秒甚至几十毫秒,这样,会延长摇臂来回摆动的时间,且每固定一个芯片,吸嘴都要经历一次停止不动、吸取芯片以及一次停止不动、将芯片固定于引线框上,这样,会影响固晶的效率,而且,芯片并不能够很好地贴合于引线框,固晶质量无法得到保证。
发明内容
本发明针对以上指出的不足,提出了一种加热贴合晶圆方法,通过对引线框加热,使得芯片和引线框接触部位的材料充分扩散和熔融,并配置供氮机构防止氧化,由于引线框材料各有不同,膨胀系数略有差异,此方式可以降低焊接界面崩裂的风险,从而使得晶圆贴合更加牢固,进而提高固晶质量。
本发明至少通过如下技术方案之一实现。
一种固晶机,包括承装机构、加热载台机构、相机识别机构、取晶固晶机构和晶圆台机构;
所述加热载台机构包括载台加热装置和供氮机构、取料装置;
所述承装机构包括框架驱动装置和引线框,所述引线框上设有用于承装芯片的固晶位;框架驱动装置带动所述引线框在载台加热装置上滑动,使载台加热装置对引线框进行加热后将引线框的固晶位移动到取晶固晶机构的焊头下方;
所述取晶固晶机构包括焊头、伺服电机,焊头一端连接与伺服电机,另一端自由端装有可更换的吸嘴,伺服电机控制焊头自由端做x、y、z方向的运动;
所述晶圆台机构包括晶圆台、顶针装置,顶针装置将晶圆从晶圆台上顶出,焊头吸嘴取出晶圆,将晶圆贴在引线框固晶位上,如此往复运动。
进一步地,所述引线框设有n排m列的固晶位,n排固晶位沿x方向排列,m列固晶位沿y方向排列,其中,m≥1,n≥1,且n和m均为自然数。
进一步地,所述框架驱动装置包括丝杆电机和与丝杆电机连接的拨爪;载台加热装置上刻有搬运轨道,拨爪带动引线框在搬运轨道上移动。
进一步地,所述载台加热装置包括加热载台,所述加热载台上覆盖有加热盖板防止散热;加热载台上刻有供引线框移动的搬运轨道,加热载台和加热盖板之间留有供引线框移动的缝隙;
进一步地,所述供氮机构包括多个温度传感器、多个氮气输出管和多个加热丝;
所述温度传感器的温度探头与所述加热载台、所述氮气输出管连接,所述氮气输出管有氮气输出口,所述加热丝一一对应缠绕在氮气输出管上。
进一步地,所述取料装置包括取料盒、取料器、金属传感器,取料器自由端用于取料盒取料,金属传感器位于取料器底部,一端与气缸连接,金属传感器用于判断取出的料是否为引线框;取料器初始化时位于取料盒正上方,取料器与取料盒平行,取料器向下移动吸取取料盒中的引线框,并放置在加热载台机构上。
进一步地,所述相机识别机构包括两个相机,用于拍摄取晶时晶圆台和固晶时引线框固晶位两个部分的图像。
进一步地,所述晶圆台包括晶圆盘,晶圆盘上贴有晶圆的蓝膜;晶圆台与伺服电机、旋转电机连接,控制晶圆台做x方向和y方向上移动以及控制晶圆盘旋转。
进一步地,所述顶针装置包括与电机连接的顶针,电机驱动顶针做竖直方向运动,将晶圆从蓝膜上顶出,配合焊头吸嘴完成同步上抬动作取出晶圆。
实现所述的固晶机的固晶方法,包括以下步骤:
S1.加热载台分为n个温区,按照设定温度实时加热;
S2.待n个温区温度加热到指定温度,取料装置的取料器从料盒取出引线框,取料器底部的传感器将与引线框接触,根据传感器的信号判断是否为金属引线框,如果是则将触发与传感器连接的气缸打开,取料器将引线框吸取,并放置在加热载台的起始端,如非金属则与传感器相连接的气缸关闭,取料器将取出的物料丢弃,再次重新从取料盒中取料;
S3.将拨爪放入引线框的边缘小孔内,带动引线框在加热载台机构的搬运轨道上进行x方向上的缓慢移动,将引线框进行定位后,加热载台将对引线框进行加热;
S4.直到引线框的第一列到达焊头下方位置即焊片位置,相机进行拍照识别焊盘,并将拍到的图像通过图像采集卡发送至计算机中,计算机将图像上的引线框固晶位坐标进行计算并转换为焊头需要达到的坐标,称之为固晶坐标;
S5.另一相机对着晶圆台进行拍照识别符合规格的晶圆,获取晶圆的图像,并将图像通过图像采集卡送至计算机中计算,从而获取晶圆的图像坐标,软件将获取的晶圆的图像坐标转换成焊头对应的机械坐标,称之为取晶坐标;然后晶圆台在底部连接的电机作用之下,在x方向上移动一个晶圆的距离,等待下一次识别;
S6.焊头到达取晶坐标位置,同时顶针在电机的驱动作用之下,将蓝膜上的晶圆向垂直方向顶出,焊头吸嘴吸取晶圆,焊头带着晶圆到达固晶坐标,并垂直向下接触引线框的固晶位置,并将晶圆放置在固晶位上,从而完成一片晶圆片的贴片动作;
S7.重复步骤s5、步骤s6,待引线框第一列n片全部焊完后,拨爪将移动一个单元的距离,再次重复步骤s4、步骤s5、步骤s6,直到一个引线框所有固晶位都有芯片,将完成的引线框通过拨爪运送至出料区,放至出料盒之中;
S8.重复步骤s2~步骤s7,直到取料盒中的引线框全部取出。
与现有技术相比,其有益效果在于:
本发明的固晶机中,焊头z轴带动吸嘴运动,从晶圆盘上,通过与顶针的配合,从晶圆上取出芯片,并将芯片搬运至引线框上的固晶位置。引线框上的固晶位置一般呈矩阵分布,吸嘴以一列为单位进行焊片,一列完毕,引线框在拨爪的驱动下向前移动一个单位,进行下一列的焊片,因此,焊头主要会进行在y方向和z方向的运动,且晶圆盘座台配置有顶针,顶针机构在焊头吸嘴到达晶圆上方时,焊头和顶针同时上抬,不让焊头接触晶圆而采用同步上抬的动作主要是为了防止压坏晶圆,在固晶质量上有了很大的提升,且焊头来去的动作在y和z方向上往复循环,无需传统的摆臂,吸嘴负责配合晶圆台顶针将顶出的晶圆吸住并将其贴在高温加热的引线框焊盘上,因此节省了固晶时间,提高了固晶效率。
本发明的固晶方法应用了上述固晶机,本固晶方法可以在固晶时,由供氮机构提供无氧环境,防止芯片或者引线框由于在加热的同时接触到空气而氧化;且氮气的温度和固晶机的温度接近,氮气不会和芯片有过多的热交换,还可以使得芯片的降温更加温和,不至于由于过大的温差导致爆晶的意外,从而影响固晶质量。
附图说明
图1为本申请实施例固晶机固晶部分的框架示意图;
图2为本申请另一实施例的固晶部分的结构示意图;
图3为本申请为图1所示的固晶机的引线框结构示意图;
图4为图1所示固晶机的焊头部分结构示意图;
图5为本申请实施例的晶圆台结构主视图;
图6为本申请实施例的晶圆台结构示意图;
图7为本申请实施例的顶针结构示意图;
图8为本申请实施例的顶针结构爆炸图。
附图标记说明:
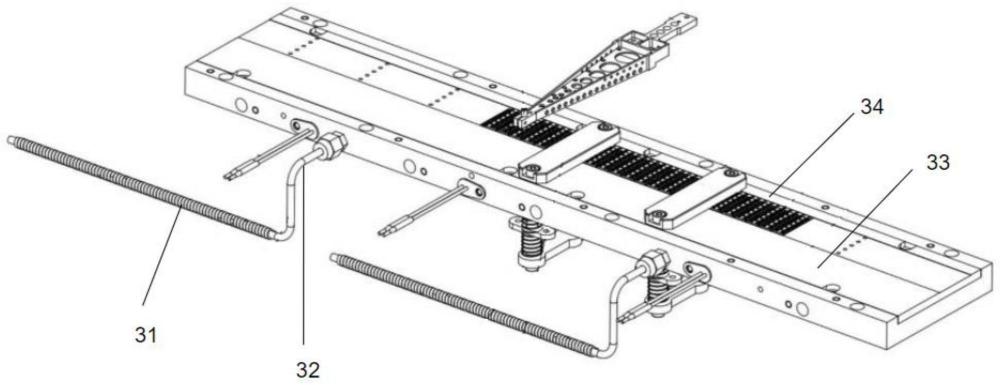
11-引线框、12-固晶位;2-取晶固晶机构:21-旋转电机;22-焊头、23-焊头位移传感器、24-力控电机、25-吸嘴;3-加热载台机构:31-加热丝、32-氮气输出管、33-盖板、34-搬运轨道、35-加热载台;4-晶圆台机构:41-晶圆盘、42-x轴移动平台、43-y轴移动平台、44-晶圆旋转电机;5-顶针装置:51-电机、52-顶针帽、53-顶针、54-底座、55-顶杆;100- X方向、200 -Y方向、300- Z方向。
具体实施方式
为使得本申请实施例的目的,技术方案和优点更加清楚,接下来将结合本发明的附图对本发明实施例中的技术方案进行清楚、完整地描述,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实例。基于本发明中的实例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的其它实施例,均属于本发明保护的范围。
如图1~图8所示,本实施例的一种固晶机,其包括承装机构、取晶固晶机构2、加热载台机构3、晶圆台机构4、相机识别机构5;
所述承装机构包括框架驱动装置、引线框11,引线框11上包含固晶位置12,所述固晶位置12也称之为焊盘;
所述框架驱动装置包括丝杆电机和与丝杆电机连接的拨爪,拨爪带动引线框在加热载台机构的搬运轨道上移动。框架驱动装置带动所述引线框11滑动于加热载台35的搬运轨道34之上;
所述引线框11设有n排m列的固晶位,n排固晶位沿x方向排列,m列固晶位沿y方向排列,其中,m≥1,n≥1,且n和m均为自然数。
所述加热载台机构包括载台加热装置和供氮机构、以及取料装置;
所述载台加热装置包括加热载台35,所述加热载台上覆盖有加热盖板33防止散热;加热载台35上刻有凹槽形成用于移动引线框11的搬运轨道34,加热载台35和加热盖板33之间留有供引线框移动的缝隙;
载台加热装置包括多个温度传感器和加热丝31、盖板33和多个氮气输出管32,氮气输出管上有多个氮气输出口,温度传感器具有多个温度探头,探头连接于加热载台35和氮气输出管32,加热丝31缠绕在氮气输出管32上,加热载台机构3给搬运轨道34加热,盖板33防止散热,搬运轨道34上承载引线框11,间接的给引线框11加热,加热丝31给氮气输出管32加热,使得氮气地温度和引线框11的温差不大,不会有太多的热交换,还可以使得芯片降温更加温和,以防止固晶位12上的芯片出现爆晶等意外。
所述取料装置包括取料盒、取料器、金属传感器,取料器自由端用于取料盒取料,金属传感器位于取料器底部,一端与气缸连接,金属传感器用于判断取出的料是否为引线框,取料器初始化时位于取料盒正上方,取料器与取料盒平行,取料器垂直向下可去取料盒中取料。
所述取晶固晶机构2包括旋转电机21、焊头22、与焊头竖直平行安装的焊头位移传感器23,焊头位移传感器23主要是负责判断焊头是否接触到引线框11上的固晶位12;所述焊头22与力控电机24连接,焊头22上有可以更换的吸嘴25,吸嘴25固定在焊头22的末端,可以根据使用磨损情况进行更换,焊头22在力控电机24的驱动下,做Z方向300的运动。旋转电机21连接于焊头的连杆上,控制焊头的旋转;
所述晶圆台机构4包括晶圆台、x轴移动平台42和y轴移动平台43、顶针装置5和旋转电机44;晶圆台包括晶圆盘41,晶圆盘41贴有晶圆的蓝膜;顶针装置5连接伺服电机,晶圆台底部连接旋转电机44以驱动晶圆盘41旋转至正确的角度;x轴移动平台42和y轴移动平台43以垂直的方向安装在晶圆台底部,以控制晶圆台x、y方向上的运动。
所述顶针装置5包括顶杆55、底座54,顶杆55固定于底座54,电机51连接的顶针53,电机51驱动顶杆55带动顶针53做竖直方向运动,将晶圆从蓝膜上顶出,配合焊头吸嘴完成同步上抬动作取出晶圆。
框架驱动装置的拨爪将钩住引线框11边缘的定位孔内固定,拨爪将带动引线框11沿着X方向(第一方向),且相对于加热载台35移动,引线框在拨爪的作用之下到达焊头下方,并在焊头取晶固晶动作之后,直至引线框的一列固晶位上全部具有芯片之后,拨爪在丝杆电机作用下将带动引线框11迅速移动一单元距离(相邻两列固晶位之间的距离称之为单元距离)切换至下一列,如此循环,以使得固晶工作有条不紊的进行。
引线框11上的固晶位12呈矩阵分布,在一列固晶位12地其中一个固晶位12上放置有芯片,下一次焊头22固晶的位置就需要在Y方向(第二方向)200上加上一个固晶位的距离,以便于对此列的下一个固晶位放置芯片;同时晶圆台机构4上的x移动平台42也需要移动一个晶圆的距离,如果晶圆台机构4在X方向(第一方向)100上的限位超过限制,则y轴移动平台43则需要移动一个晶圆的距离,进行z字型取晶圆路径。直到晶圆盘上的晶圆全部取完或者所有的引线框11的固晶位12上都有芯片才停止。
拨爪驱动装置可以带着引线框11沿着第一方向移动,以矫正引线框11被拉动的错误,补偿第一方向上的距离调整。
基于上述技术方案,焊头22带动吸嘴25做X方向(第一方向)和Z方向的移动,从晶圆上吸取芯片,芯片在电机51驱动顶杆55带动顶针53做Z方向300方向运动,高出顶针帽52一定高度,顶针53和吸嘴25做同步上抬运动,吸取晶圆,并将芯片做X方向(第一方向)200和Z方向300的运动,搬运至引线框11的固晶位12上,引线框11在加热载台35上充分加热,焊头22将芯片贴在固晶位12,使得芯片和固晶位充分接触,将固晶位的锡膏充分覆盖,保证接触面充分熔融,以此保证固晶质量。所述引线框11为金属引线框。
引线框11上的固晶位12一般呈矩阵分布,且每一行固晶位12的高度在盖板33压力之后高度将保持一样,因此焊头在机器运作前对每一行焊盘选取第一列做对高处理,获取每一行的高度,之后将按照此高度处理后的参数,对每行固晶位12进行贴片,而不用在每次要贴片的时候对每一个固晶位12计算高度后再贴片,这样省去了时间,提高了固晶效率吧,且可以保证固晶质量。
作为一种优选的实施例,焊头22一次运动的时间在120ms之内,由于焊头22不做停止,且焊头22配合顶针53做同步上台的时间可忽略不计,那么焊头22在一次来回运动的时间将不会超过240ms,假设晶圆上有15k个芯片,那么焊头22工作的时间240ms乘以15k,为3600s,约一小时;而对于现有的固晶机,一般固定15k个芯片要超过90分钟,可见本机有极高的固晶效率;
在本实施例中,取料器的传感器和拨爪连接,取料器有料则会触发拨爪动作,控制晶圆台的电机和控制焊头动作的电机可以由应用程序控制协同工作,此处不便对应用程序说明,但有一点,由应用程序设定工序,相应的控制焊头所连接的电机、与晶圆台连接的电机;取料器传感器与拨爪连接,可以免去设置拨爪的位置传感器,可以节省成本,以及减少硬件布线情况。
在本实施例中,取料驱动、取晶驱动、拨爪驱动、晶圆台驱动,可以采用直线电机、伺服电机、步进电机、气缸或者其他可以做直线驱动的结构,取晶驱动,框架驱动的驱动方式沿用现有技术中常见的驱动方式,再此处不做说明。
在本实施例中,第二方向200与第一方向100垂直,第三方向300与第一方向100和第二方向200同时垂直,引线框11上表面向内凹陷,形成固晶位12,引线框11上设有N排M列个固晶位12,N排固晶位12沿着第一方向100排列,M列固晶位12沿着第二方向200排列,其中,N≥1,M≥1,且M,N均为自然数,焊头先沿着第二方向将一列N个固晶位12进行固定,之后再移动一个固晶位单元,将M列固晶位12全部贴片完毕。
一般地,在固晶时,为了保证芯片能够与固晶位12上的锡膏很好的贴合,保证固晶效果,芯片的温度一般在一百摄氏度到几百摄氏度,以使得锡膏熔化,且引线框11一般采用铜或者铜合金。
在本实施例中,多个氮气输出口沿着第一方向100间隔分布于加热载台35上,氮气输出口可以输出氮气,将加热载台35的空气推开,给搬运轨道34上的引线框11提供无氧环境,防止芯片和引线框11接触氧气而氧化。
作为一种优选的实施例,框架载台35的预热温度为450℃左右,在引线框11上固晶时最佳温度是480℃,因此氮气的温度也要维持在450℃480℃;此外,载台35的温度在第一方向100分布从340℃到450℃再递减到280℃,这样防止氮气和芯片有过多的热交换,实际上,氮气的温度与芯片固晶时的温度差值在30℃以内,即可保证芯片很好的降温。
本申请的加热丝31沿着第一方向分布,以使得引线框11在搬运轨道34上加热均匀,各个部分温度相差不大。
所述相机识别机构包括两个CCD工业相机、光源、图像采集卡,用于拍摄取晶和固晶两个部分的图像;通过基于灰度信息的芯片识别定位算法,归一化互相关算法等将符合标准的晶圆从晶圆盘上取出;并通过模板匹配算法识别引线框上的固晶位置,将晶圆固定在固晶位的准确位置上。
本实施例的相机识别机构分为取晶相机和固晶相机,取晶相机主要是通过对晶圆拍照,并将获取的图像坐标转换为焊头的机械坐标,可供焊头去准确的位置取晶圆,提供的坐标是取晶圆的依据;而固晶相机则是通过对固晶位12进行拍照,获取准确的焊盘位置,焊头将芯片按照相机转换给出的机械坐标,准确地贴在固晶位12的正确位置,为焊盘固晶位置提供了依据;
本申请还提出了一种固晶方法,包括以下步骤:
S1.加热载台35工作,将加热载台35的n个温区按照设定温度实施加热,并通过传感器获取载台35的实际温度,同时供氮机构开启,氮气输出管32有氮气输出;
S2. 待n个温区温度加热到指定温度,取料装置的取料器从料盒取出引线框,取料器底部的传感器将与引线框接触,根据传感器的信号判断是否为金属引线框,如果是则将触发与传感器连接的气缸打开,取料器将引线框吸取,并放置在加热载台的起始端,如非金属则与传感器相连接的气缸关闭,取料器将取出的物料丢弃,再次重新从取料盒中取料,直至取出引线框;
S3.由框架驱动装置的拨爪将引线框11进行定位,将拨爪放入引线框11的边缘小孔内,带着引线框11在框架载台上进行第一方向100上的缓慢移动,此时加热载台35将对引线框11进行加热;
S4.拨爪牵引引线框在加热载台35上移动,直到引线框11的第一列到达焊头下方位置即焊片位置,相机进行拍照识别焊盘,并将拍到的图像通过图像采集卡传输至计算机中,将图像上的引线框固晶位坐标进行计算并转换为焊头需要达到的坐标,称之为固晶坐标;
S5.另一相机对着晶圆台进行拍照识别符合规格的晶圆,获取晶圆的图像,并将图像通过图像采集卡传输至计算机中计算,从而获取晶圆的图像坐标,软件将获取的晶圆的图像坐标转换成焊头对应的机械坐标,称之为取晶坐标;然后晶圆台在底部连接的电机作用之下,在第一方向100上移动一个晶圆的距离,等待下一次识别;
S6.焊头22到达取晶坐标位置,焊头22垂直向下沿着第三方向300移动,此时晶圆台顶针53在电机51推动顶杆55作用下,向上沿着第三方向300戳破晶圆盘41上覆盖的蓝膜,将晶圆抬起,吸嘴25则在顶针53上方进行同步上抬,直至吸到芯片,然后去固晶坐标焊片,焊头22在电机作用下同时做第二方向200和第三方向300上的运动,回到固晶坐标位置贴片,并垂直向下接触引线框11的固晶位12,直至固晶位12上有芯片;
S7.重复s5,s6,直到引线框11第一列n片全部焊完,然后拨爪将移动一单元的距离,再次重复s4,s5,s6的步骤,直到一个引线框11所有固晶位12都有芯片,将完成的引线框11通过拨爪运送至出料区,放至出料盒之中;
S8.重复步骤s2~步骤s7,直到取料盒中的引线框全部取出。
进一步地,载台35的温度沿着x方向排列的8个温区,温度先逐级递增,再逐级递减;一般地,框架载台35的预热温度为450℃左右,在引线框11上固晶时最佳温度是480℃,因此氮气的温度也要维持在450℃480℃;此外,载台35的温度在第一方向100分布从340℃到450℃再递减到280℃,这样防止氮气和芯片有过多的热交换,实际上,氮气的温度与芯片固晶时的温度差值在30℃以内,即可保证芯片很好的降温。
- 一种方便清理封胶站的LED平面型全自动固晶机
- 一种韧性优异粘接性强的LED有机硅固晶胶
- 一种高速双头自动上下料固晶机
- 一种LED芯片有机硅固晶胶
- 固晶机/固阻机软灯带的进料机构、进料方法及固晶机和固阻机
- 一种高效率自动上下料的LED固晶机固晶装置及其固晶方法