用于测量承受离心力的物体的应变的方法和设备
文献发布时间:2023-06-19 13:48:08
本发明涉及一种用于在旋转试验台上测量承受离心力的转子的应变的方法和设备。
为了测量作用在旋转体上的载荷,使用旋转试验台,在旋转试验台中,诸如转子之类的物体在其运行转速范围及以上运行。此外,转子可能受到例如周期性的转速变化或温度波动。
为了确定转子的变化,例如使用应变计测量转子的伸长、即应变。但在此不利的是,测量限于单独的测量点,并且不能实现整面的测量。此外,应变计的应用费时费力,并且为了在转子上测量还需要无线的信号传输。此外,应变测量由于其尺寸不适用于精细结构。此外,应变测量还导致待检查的结构由于粘贴被无意加强。
此外已知,对承受载荷的物体拍照并且借助数字图像相关性确定载荷。文献EP 1510 809 A1公开了一种用于测试诸如安瓿之类的产品的设备,其中,安装在旋转的相机塔上的相机生成试验件的图像,这些图像被输入下游的评估系统。相机可以与试验件一起旋转,或者试验件可以在相机的一个枢转角度期间进行完整的旋转,从而使试验件的整个表面对相机可接近。文献WO 2010/089139 A1描述了一种方法,其中,将相机的镜头对准至少一个光学可检测的标记并且将该标记在矩阵传感器上成像。图像数据由实施图像识别的图像处理设备提供,从而确定标记在图像区内的位置,并且借助计算装置确定该标记的位置与至少一个目标值的偏差并且根据该标记在图像区内的位置将该偏差量化。
文献DE 60 2006 000 063 T2示出对涡轮燃气设备的构件的原位监测,其中设置相机和光源,并且在相机接收构件的图像期间,光源实现对旋转构件的照明。该方法的缺点是为了测量位移和检测形状提供两种不同的复杂的测量系统需要高昂的费用。
在文献WO 2009/143848 A2中示出一种用于风力设施的转子叶片。多个光源和光传感器布置在转子叶片上,其中,与转子叶片的旋转相关联的光源的位置变化可由传感器检测。由文献WO 2009/143849 A2已知一种用于风力设施的转子叶片,在该转子叶片上布置有多个标记和光传感器。与转子叶片的旋转相关联的标记的位置变化可由传感器检测。
此外,斑点-干涉测量法能够实现在任意构件上的位移和/或变形的非接触式和面上的检测。已知2D和3D斑点-干涉仪,可以用于确定在两个或三个坐标轴上的变形。为此,用斑点-干涉仪测量表面的点沿一个或多个方向的位移分量并且针对许多点将这些分量换算到物体的坐标系或空间坐标系中。文献EP 0 731 335 A示出这样一种用于确定物体的不希望的变形的方法,这些变形通常在载荷下出现,其中,根据剪切成像的特殊方法应用斑点-干涉测量法。但在此不确定物体的形状。该设备具有两个分开的相机和一个双臂的马赫曾德干涉仪。
文献DE 10 2006 012 364 A1公开了一种用于光学测量转子的至少一个转子部件的位置状态的方法。在此,转子绕其旋转轴线旋转并且至少一个转子区段稳定地或脉冲式地被光源照明,并且视频频闪观测单元的摄像机聚焦在被照明的区段上。根据转子部件的位置,通过触发传感器生成触发信号,并且视频频闪观测单元由触发信号控制在精确的相位,并且由相机拍摄图像。
文献DE 10 2013 110 632 A1涉及一种用于测量旋转转子的伸长的方法,其中,距离传感器布置在距转子一定距离处并且以非接触方式检测转子表面与距离传感器之间的距离。
文献DE 10 2008 055 977 A1描述了一种用于确定旋转的切削工具的变形的方法和设备,其中确定工具的径向伸长。该设备具有发射测量光束的发射器和测量该测量光束的被接收的强度的接收器,其中,测量光束沿着旋转工具的周面切向地延伸,并且在工具的旋转期间可以用接收器测量该测量光束的相对遮暗。通过多个发射器和多个接收器的适当布置,多个测量光束可以沿着旋转工具的不同区域延伸。
文献DE 195 28 376 A1公开了一种用于旋转工具的非接触式测量的方法,其中,使用光电测量段,该光电测量段通过对应的光电二极管测量移入测量段中的工具的包络线引起的光束中断。
本发明所要解决的技术问题是提供一种廉价且在仪器方面简单的对承受离心力的物体的应变测量。
所述技术问题通过权利要求1和权利要求8的特征解决。优选的设计方案在从属权利要求中给出。
所述技术问题按照本发明通过一种用于测量承受离心力的转子的应变的方法解决,其中,将所述转子安置在旋转试验台的能够与驱动装置相连的容纳件中,触发照相机和作为短时照明单元的短时激光器,并且对所述转子的表面的至少一个区域拍照,并且将第一图像作为初始状态传输给评估单元,加速所述转子并且在至少一个转速下重新触发所述照相机和作为短时照明单元的短时激光器,并且拍摄所述表面的先前被拍照的区域的至少一个另外的图像,将该另外的图像作为测量状态传输给所述评估单元,所述评估单元借助数字的图像相关性计算所述转子在所述表面的被拍照的区域中的应变,其中,所述照相机的图像传感器的曝光时间由从所述短时激光器发出的照明的持续时间确定。根据本发明的方法能够实现以较少的设备结构对转子进行简单且快速的应变测量。尤其因为不需要在相机和短时照明单元之间进行复杂的同步。转子在初始状态和测量状态下的照明仅通过由短时照明单元提供的照明进行。这种照明有利地是短时照明单元的光脉冲,所述短时照明单元是短时激光器、尤其是脉冲激光器、例如短脉冲激光器或超短脉冲激光器。通过使用短时照明单元实现较少的运动模糊,并且转子的运动在一定程度上被冻结。
此外,根据本发明的方法能够实现对所观察的测量面的整面的应变测量,因为所述方法不像已知的应变计那样限于单独的测量点。在测量状态下并且在不同转速下拍摄的多个图像或者描绘转子的不同表面区域的多个图像可以彼此被同步,从而可以看到基本上整个转子表面。
在本发明的意义上,所述转子是旋转体。
在优选的设计方案中,待观察的最大圆周速度确定最大允许的曝光时间,以便将运动模糊保持在可接受的限度以下。此外,该允许的限度也可以由照片的所希望的图像分辨率来确定。更高的分辨率尤其需要更短的曝光时间。
可以规定,当通过参考传感器检测到设在转子或转子容纳件、尤其转子容纳适配器的表面上的参考标记时,启动照相机的触发过程和/或短时照明单元的触发过程。参照旋转角度还能够实现拍摄的多个图像的同步。此外有利的是,照相机的触发和/或短时照明单元的触发相对于参考标记延迟地发生。在此,可预设的角度偏差可以通过转子的已知转速被换算为直到触发照相机和/或短时照明单元的延迟时间或等待时间。因此可以在不同的角度位置中拍摄转子。
应变的计算可以在一种设计方案中如此进行,即,所述评估单元将在测量状态下拍摄的图像与在初始状态下拍摄的图像进行比较,并且根据在所述表面的被拍照的区域中的光学可识别的表面图案的移动计算转子的应变。光学可识别的表面图案尤其构成参考点,借助这些参考点可以确定移动。表面图案可以一方面由转子的自然表面结构构成。也就是说,被测量的转子的随机的、但特定的表面特征可以用于确定离心力对转子的影响并且因此确定这些自然表面特征的可能发生的移动。自然表面结构可以例如是转子中的槽。但也可以有利的是,表面图案是施加到转子表面的标记的组成部分。在此有利的是,表面图案被解析得如此精细,使得要观察的应变在所有的表面点处都可见。
此外可以规定,使用多个图像中的被拍照的区域内的图形元素来同步这些图像。借助光学可识别的图形元素可以将偏移地拍摄的图像片段组合在一起,从而可以与另外的照片同步,以便示出应变变化。图形元素可以例如辐射状地施加,由此可以将偏移的照片(以平移和旋转的方式)彼此对齐,方式是尤其使辐射状的标记一致。但也可以施加随机的图案作为图形元素,例如颜色标记,通过颜色标记也可以将多个照片彼此对齐。
此外,本发明还涉及一种用于测量承受离心力的转子的应变的设备,所述设备具有旋转试验台,所述旋转试验台具有用于容纳转子的容纳件,所述容纳件能够与驱动装置旋转地连接,所述设备还具有与所述转子相间隔地布置的照相机,所述照相机相对于转子如此布置,从而能够拍摄所述转子的表面的至少一个区域的图像,并且所述设备还具有用于照明所述转子的、设置为短时照明单元的短时激光器,其中,照相机的图像传感器的曝光时间能够由从所述短时激光器发出的照明的持续时间确定。在优选的设计方案中,该设备用于实施上述方法,因此上述设计方案和优点也可以应用于该设备。在现有技术中,除了高速相机之外,还使用复杂的照明系统来测量承受离心力的物体的应变。在此由高速相机的快门打开时间来确保避免出现运动模糊,在非常短的曝光时间的情况下,快门打开时间还导致分辨率受限制。此外,高速相机和照明系统需要以耗费的方式被同步。在根据本发明的设备的情况下,仅使用照相机和短时照明单元,其中,转子仅通过短时照明单元提供的光被照明,这冻结了转子的运动。因此实现较少的运动模糊。另外的优点是,即使在转子的圆周速度较高的情况下也可以实现高的图像锐度并且因此实现高分辨率。此外,由于设备要求较少,该设备比已知系统明显更具成本效益和经济性。
在一种设计方案中,所述设备具有定位器件,所述定位器件能够实现照相机相对于转子的位置改变。借助所述定位器件例如可以调节照相机和转子之间的距离。在此,高度可调的三脚架可以是有利的,该三脚架承载照相机并且可以布置在旋转试验台中。也可以在旋转试验台的壳体上设置相应的照相机支架。照相机和转子之间的距离可以手动或自动地改变。
借助根据本发明的方法和设备可以以较少的设备耗费测量旋转体由于离心力和热膨胀引起的径向伸长。
以下借助本发明的在附图中示出的实施例更详细地阐述本发明。在附图中:
图1示出优选的设备的示例性结构;
图2示出照明的延迟触发;
图3示出具有一个照相机的设计方案,所述照相机具有倾斜适配器;和
图4示出具有两个照相机的设计方案。
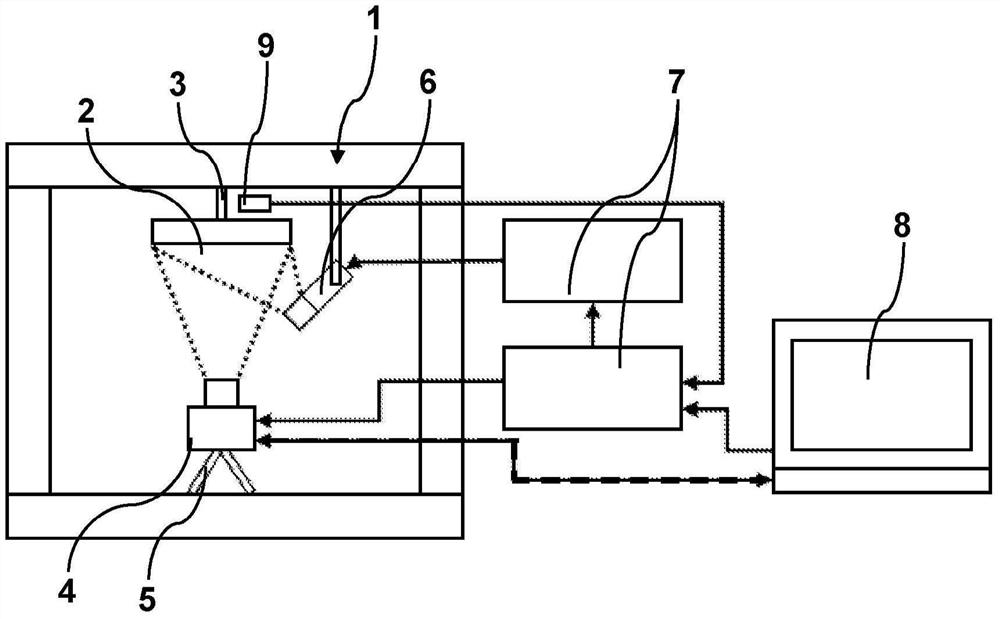
图1示出优选设备的示例性结构。旋转试验台1通常由具有多个保护环的壳体构成。在壳体的中央设有驱动装置,待测量的转子2能够与该驱动装置连接。为此,旋转试验台1具有相应的支承件或适配器3,该支承件或适配器固定转子2。在图1中,旋转试验台1或其部件仅示意性地示出。与被支承的转子2相对地,照相机4与该转子相间隔地布置、更确切地说有利地布置为,转子表面可以被拍摄。照相机4可以例如固定在旋转试验台1的壳体上的支架5上。在此,支架5可以具有定位器件,该定位器件改变照相机4相对于转子2的相对位置并且例如能够实现转子2和照相机4之间的距离的改变和/或照相机4相对于转子2的轴向移动。定位器件可以设计为手动或自动的、尤其电气、气动或液压的。电气的定位器件的一个例子是线性马达,线性马达能够可控地改变间距。为了安装照相机4的支架5还可以使用三脚架,该三脚架固定在壳体上并且具有相应的定位器件。照相机4例如可以是数码相机。
用于照明转子2的短时照明单元6同样固定在壳体上。短时照明单元6优选相对于转子2布置为,转子2的面向短时照明单元6的表面基本上均匀地被照明。此外有利的是,短时照明单元6不伸入照相机4的用虚线示出的光路中。照相机4和短时照明单元6可以与相应的控制和监控设备7连接,控制和监控设备例如能够实现对照相机4和短时照明单元6的触发的控制。此外,照相机4和短时照明单元6与评估单元8连接,该评估单元可以例如是计算机、平板电脑或其它计算单元。控制和监控设备7也可以通过评估单元8被控制和调节。
借助与转子相间隔地布置的传感器9可以无接触地检测例如施加在转子表面或转子容纳适配器上的参考信号、例如参考标记。该传感器可以是例如磁性传感器或电容传感器,但也可以是光学标记。
为了测量承受离心力的转子2的应变,在转子2被引入容纳件3中之后,进行对转子2的初始状态的至少一次拍照,方式是触发照相机4和短时照明单元6并且对转子2的表面的至少一个区域拍照。该第一照片作为初始状态的图像被传输给评估单元8。当然也可以拍摄多张这样的参考照片,方式是对转子2的表面的多个区域拍照。
随后将转子2加速到可选择的转速,该转速例如可以等于转子的运行转速或者超出该运行转速。当达到该转速或转速范围时,通过照相机2拍摄图像尤其通过如下方式实现,即,重新触发短时照明单元6,对转子2照明并且将照相机4的图像传感器相应地曝光。照相机4的快门可以在对旋转的转子2拍照之前就已经尤其由控制和监控设备7控制地置于打开位置中。为此,对短时照明单元6的照明的触发可以延迟地发生。由于在旋转试验台1中没有其它光源,转子2仅由短时照明单元6照明。也就是说,因此仅由短时照明单元6提供的照明用于照相机4的图像传感器的曝光,其中,不需要在照相机4和短时照明单元6之间实现耗费的同步。短时照明尤其是激光器的光脉冲。
短时照明有利地如此选择,使得转子2的运动看起来在一定程度上被冻结以便实现希望的分辨率并且实现较少的运动模糊。例如,如果在20000rpm(转/分钟)的最大转速下希望最大0.1像素的运动模糊,则照明持续时间可以处于15纳秒至25纳秒的范围内。而如果运动模糊最大为2个像素并且转子速度为15000rpm,则照明可以持续大约30至40纳秒。小于10纳秒的照明持续时间可能有利于高的圆周速度和希望的小于0.1像素的运动模糊。
在本发明的意义上,小于100纳秒的照明尤其可以被称为短时照明,其中,照明持续时间取决于像素或子像素区域中希望的锐度和转子2的圆周速度。也就是说,希望的分辨率需要一定的锐度并且因此针对希望的圆周速度得出最大的短时照明持续时间。圆周速度越高并且希望的锐度越高或希望的运动模糊越少,则短时照明单元6的照明持续时间有利地设计得越短。
相机快门可以在拍摄图像之后、例如在确定的延迟时间之后关闭。但根据需求,快门也可以长时间保持在打开位置中,其中,照片传感器的曝光仅通过基于短时照明单元6的照明进行。也就是说,图像拍摄的触发可以基于短时照明单元6。
所述表面的先前被拍照的区域的至少一个另外的图像作为测量状态被传输给评估单元8。当然可以在不同的转速下或者在相同的转速下拍摄多个图像。评估单元8随后借助于数字的图像相关性确定转子2在表面的被拍照的区域中的应变。在此,初始状态下的表面的图像用作参考图像,将测量状态的图像、即在转子2承受载荷的情况下的图像与参考图像进行比较。在此,由转子2的自然表面结构产生的图形元素或者作为设在转子表面上的标记的组成部分的图形元素可以用于多个图像的彼此叠加。由于有利的是,将基本上完整的转子表面的照片存储为参考照片或初始状态,因此借助图形元素可以使这些照片彼此叠加,方式是不仅将初始状态和测量状态相互比较,还将初始状态和测量状态彼此同步。因此产生对转子2的整面的观察。由此还可以消除刚性体偏移。
当照相机4相对于转子2的位置已经改变并且从不同位置或角度拍摄转子2的图像时,对于图形元素也是有利的。借助图形元素可以使不同的图像彼此叠加。
图2示意性地示出照明的延迟触发。通过使用参考传感器9可以对短时照明单元6进行角度定义的操控,该参考传感器与转子2相间隔地布置并且以无接触的方式检测例如在转子2的表面上的参考标记。在此,每转一周,参考标记被检测到一次。借助已知的转速将可预设的角度偏差换算为直到短时照明单元6被触发并且由未示出的照相机进行图像拍摄的等待时间。因此,转子2可以在不同的角度位置被照相机拍照。通过拍摄的图形元素可以将所拍摄的图像彼此同步,这些图形元素作为标记存在于转子表面上。
图3示出具有一个照相机的设计方案,该照相机具有倾斜适配器。可以规定,照相机4具有倾斜和位移适配器或者具有倾斜适配器和/或位移适配器10。备选地,照相机4可以具有倾斜和位移镜头10。适配器或者倾斜和位移镜头在图3中示例性地示出。当短时照明单元6相对于转子2布置为,转子2的面向短时照明单元6的表面基本上均匀地被照明时,实现转子2的最佳照亮。在此,短时照明单元6尤其相对于转子2布置为,使得从短时照明单元6发出的多个光束基本上同时照射到转子表面上,或者从短时照明单元6发出的光锥将转子2的面向该光锥的表面完全照明。从图3中可以看到,照相机4可以相对于转子2倾斜地定向,以便短时照明单元6不位于照相机4的光路中。为了实现倾斜的聚焦平面,可以使用倾斜适配器10或类似物。
图4示出具有两个照相机的设计方案。在该设计方案中,短时照明单元6也相对地转子2布置在中央,以便实现转子2的均匀照亮。此外,该设计方案具有第二照相机11,该第二照相机与第一照相机4一样相对于转子2倾斜地布置并且例如具有倾斜适配器10。照相机4、11可以同时或者相继被触发。触发可以通过如下方式进行,即,照相机4、11的快门打开并且对转子2的短时照明由短时照明单元6实现,通过短时照明将照相机4、11的图像传感器曝光。为了实现两个照相机4、11的同时拍摄,当短时照明单元6被触发并且转子2被照明时,两个照相机4、11的快门都打开。光的传输时间则确保两个图像传感器的曝光基本上精确地同步。随后又关闭两个照相机4、11的快门。这些快门的关闭也可以不同步发生,其中有利的是,在图像传感器的曝光结束之后或者在照明结束之后进行。通过使用第二照相机11可以进行3D测量,在3D测量中还可能测量到转子2的轴向运动、即在一定程度上的转子2的下降或上升。该轴向运动使应变测量结果失真并且可以由优选的设计方案检测并且从应变计算中消除。