自动掰瓶设备
文献发布时间:2023-06-19 19:27:02
技术领域
本发明涉及自动化机械领域,具体而言,涉及一种自动掰瓶设备。
背景技术
安瓿瓶作为静脉注射药液中重要药液容器之一,在自动配药过程,如何实现自动掰瓶是非常关键的一环,而直接掰瓶会造成一定的玻璃碎片,容易掉进安瓿瓶内,具有一定的危险性。
并且,现有技术中的掰瓶操作往往是人工直接操作的,这导致掰瓶时产生玻璃碎片的情况,和对人体产生危险的情况较多,并且,现有的扳瓶操作的效率较低。
发明内容
本发明的主要目的在于提供一种自动掰瓶设备,以解决现有技术中的掰瓶方法容易产生玻璃碎片的问题。
为了实现上述目的,根据本发明的一个方面,提供了一种自动掰瓶设备,用于掰取待操作瓶的瓶头部,待操作瓶包括瓶体部,瓶体部与瓶头部之间形成瓶颈部,自动掰瓶设备包括:割瓶机构,割瓶机构包括切割主体,切割主体包括具有切割片的切割组件,切割片可转动地设置以用于对待操作瓶的瓶颈部进行切割操作;掰瓶机构,掰瓶机构包括掰瓶主体,掰瓶主体具有掰瓶部件,掰瓶部件具有用于供待操作瓶的瓶头部伸入的定位槽,掰瓶部件可运动地设置,以在掰瓶部件的运动过程中,将瓶头部掰离瓶体部。
进一步地,夹爪组件,夹爪组件包括第一夹爪和第二夹爪,第一夹爪和第二夹爪相对可运动地设置,第一夹爪和/或第二夹爪上设置有切割组件,瓶头部用于设置在第一夹爪和第二夹爪之间。
进一步地,夹爪组件还包括夹爪驱动部,夹爪驱动部与第一夹爪和第二夹爪均驱动连接,以驱动第一夹爪和第二夹爪靠近或远离;和/或第一夹爪和第二夹爪上均设置有切割组件,安装在第一夹爪上的切割组件的切割片位于第一夹爪的下方,安装在第二夹爪上的切割组件的切割片位于第二夹爪的下方;和/或割瓶机构还包括旋转驱动部件,旋转驱动部件与夹爪组件驱动连接,以驱动第一夹爪和第二夹爪绕瓶头部旋转。
进一步地,第一夹爪和/或第二夹爪包括:依次连接的第一板体、第二板体以及第三板体,第一板体、第二板体以及第三板体围成U形结构,切割组件的至少部分安装在U形结构所围成的腔体内,切割组件的切割片位于U形结构所围成的腔体外。
进一步地,切割组件还包括切割驱动部件,切割驱动部件与切割片驱动连接,以驱动切割片绕其轴线旋转;和/或割瓶机构还包括第一直线导轨和设置在第一直线导轨上的第一滑块,切割主体安装在第一滑块上。
进一步地,掰瓶主体包括:掰瓶驱动部件,掰瓶驱动部件与掰瓶部件驱动连接,以驱动掰瓶部件转动,以在掰瓶部件转动的过程中,将瓶头部掰离瓶体部。
进一步地,掰瓶驱动部件为旋转电磁铁;和/或掰瓶主体还包括安装部件,安装部件安装在掰瓶驱动部件上,掰瓶部件安装在安装部件上。
进一步地,掰瓶机构还包括:第二直线导轨和第二滑块,第二滑块可移动地设置在第二直线导轨上,掰瓶主体安装在第二滑块上。
进一步地,掰瓶部件包括第一掰动部和第二掰动部,第一掰动部和第二掰动部间隔设置,以形成定位槽。
进一步地,自动掰瓶设备还包括:连接板,连接板与割瓶机构和掰瓶机构均连接;和/或主体驱动机构,主体驱动机构分别与割瓶机构和掰瓶机构驱动连接,以驱动割瓶机构和掰瓶机构分别运动至待操作位;和/或瓶体定位机构,瓶体定位机构具有用于对待操作瓶进行定位的定位部,以通过定位部使待操作瓶保持固定。
应用本发明的技术方案,本发明中的自动掰瓶设备包括割瓶机构和掰瓶机构,割瓶机构和掰瓶机构由连接板连接为一个相对的整体,用于掰取待操作瓶的瓶头部。由于设置了割瓶和掰瓶两个机构,待操作瓶先由割瓶机构对瓶颈部进行切割,再由掰瓶机构将瓶头部掰离瓶体部,从而解决现有技术中在掰取待操作瓶的瓶头部时,有玻璃碎片产生的技术问题。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
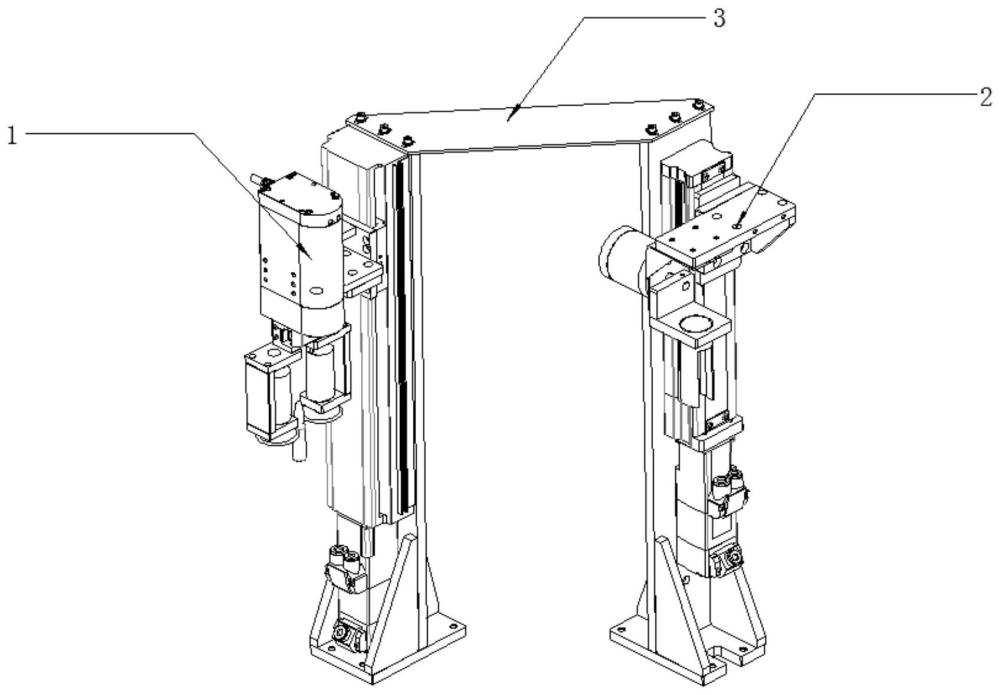
图1示出了根据本发明的自动掰瓶设备的实施例的整体结构示意图;
图2示出了根据本发明的自动掰瓶设备的割瓶机构实施例的第一个结构示意图;
图3示出了根据本发明的自动掰瓶设备的掰瓶机构实施例的第一个结构示意图;
图4示出了根据本发明的自动掰瓶设备的割瓶机构实施例的第二个结构示意图;
图5示出了根据本发明的自动掰瓶设备的割瓶机构实施例的第三个结构示意图;
图6示出了根据本发明的自动掰瓶设备的掰瓶机构实施例的第二个结构示意图;以及
图7示出了根据本发明的自动掰瓶设备的掰瓶机构实施例的第三个结构示意图。
其中,上述附图包括以下附图标记:
1、割瓶机构;10、切割主体;101、切割组件;102、夹爪组件;103、第一夹爪;104、第二夹爪;11、第一底板;12、第一加强板;13、第二加强板;14、第一安装板;15、第一直线导轨;16、第一滑块;17、第三加强板;18、第二安装板;19、第三安装板;110、夹爪驱动部;111、第一板体;112、第二板体;113、第三板体;114、切割片;115、切割驱动部件;2、掰瓶机构;20、掰瓶主体;201、第一掰动部;202、第二掰动部;203、安装部件;21、第二底板;22、第四加强板;23、第五加强板;24、第四安装板;25、第二直线导轨;26、第二滑块;27、转接板;28、第六加强板;29、第七安装板;210、掰瓶驱动部件;211、第五安装板;212、第六安装板;213、掰瓶部件;214、定位槽;3、连接板;4、待操作瓶;41、瓶头部;42、瓶体部;43、瓶颈部。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
请参考图1至图7,本发明提供了一种自动掰瓶设备,用于掰取待操作瓶4的瓶头部41,待操作瓶4包括瓶体部42,瓶体部42与瓶头部41之间形成瓶颈部43,自动掰瓶设备包括割瓶机构1和掰瓶机构2。其中,为了使待操作瓶4的瓶头部41更加方便的掰取,割瓶机构1包括切割主体10,切割主体10包括具有切割片114的切割组件101,切割片114可转动地设置以用于对待操作瓶4的瓶颈部43进行切割操作,使得瓶颈部43在具有割痕的情况下更方便掰瓶机构2操作,到达防止产生碎玻璃片的目的。
进一步地,为了将待操作瓶4的瓶头部41掰离待操作瓶4,掰瓶机构2包括掰瓶主体20,掰瓶主体20具有掰瓶部件213,掰瓶部件213具有用于供待操作瓶4的瓶头部41伸入的定位槽214,掰瓶部件213可运动地设置,以在掰瓶部件213的运动过程中,将瓶头部41掰离瓶体部42,使得瓶头部41成功掰离待操作瓶4,达到最终将待操作瓶4打开的目的。
本发明中的自动掰瓶设备包括割瓶机构1和掰瓶机构2,割瓶机构1和掰瓶机构2由连接板连接为一个相对的整体,用于掰取待操作瓶4的瓶头部。由于设置了割瓶机构1和掰瓶机构2两个机构,待操作瓶4先由割瓶机构1对瓶颈部43进行切割,再由掰瓶机构2将瓶头部41掰离瓶体部42,从而解决现有技术中在掰取待操作瓶4的瓶头部41时,有玻璃碎片产生的技术问题。
另外,为了在对待操作瓶4进行切割时,将待操作瓶4固定在一个相对方便操作的位置,切割主体10还包括夹爪组件102。其中,夹爪组件102包括第一夹爪103和第二夹爪104,第一夹爪103和第二夹爪104相对可运动地设置,第一夹爪103以及第二夹爪104上都可设置切割组件101,瓶头部41用于设置在第一夹爪103和第二夹爪104之间,当需要对待操作瓶4的瓶颈部43进行切割时,首先将待操作瓶4固定在第一夹爪103和第二夹爪104之间合适的位置上,再对待操作瓶4进行切割。
具体地,本实施例中的夹爪组件102有以下几种结构形式:
第一种结构形式:为了使第一夹爪103和第二夹爪104之间的位置可以根据需要进行调整,夹爪组件102还包括夹爪驱动部110,夹爪驱动部110与第一夹爪103和第二夹爪104均驱动连接,以驱动第一夹爪103和第二夹爪104靠近或远离,使得在不同型号的待操作瓶4安置好位置后,第一夹爪103和第二夹爪104在夹爪驱动部110的驱动下可以对待操作瓶4进行固定。
第二种结构形式:为了对待操作瓶4的瓶颈部43进行切割工作,第一夹爪103和第二夹爪104上均设置有切割组件101,安装在第一夹爪103上的切割组件101的切割片114位于第一夹爪103的下方,安装在第二夹爪104上的切割组件101的切割片114位于第二夹爪104的下方,当待操作瓶4固定好位置后,切割片114开始对待操作瓶4的瓶颈部43进行切割。
第三种结构形式:为了对待操作瓶4的瓶颈部43进行全方位的切割工作,割瓶机构1还包括旋转驱动部件,旋转驱动部件与夹爪组件102驱动连接,以驱动第一夹爪103和第二夹爪104绕瓶头部41旋转,使得瓶头部41在进行下一步掰离待操作瓶4的工作时更加方便和安全,从而使得自动掰瓶设备的效果更好。
进一步地,如图2所示,第一夹爪103以及第二夹爪104包括依次连接的第一板体111、第二板体112以及第三板体113,第一板体111、第二板体112以及第三板体113围成U形结构,切割组件101的至少部分安装在U形结构所围成的腔体内,切割组件101的切割片114位于U形结构所围成的腔体外,使得切割片114与切割主体10连接为一个相对的整体。
具体地,本实施例中的自动掰瓶设备的具体结构为:
一种具体结构为,切割组件101还包括切割驱动部件115,切割驱动部件115与切割片114驱动连接,以驱动切割片114绕其轴线旋转,一般地,可以将切割驱动部件115安置于上述U形结构内,节约空间,方便操作。
另一种具体结构为,为了使切割主体10可以根据待操作瓶4的大小与尺寸,进行垂直于放置平面的运动,方便操作,割瓶机构1还包括第一直线导轨15和设置在第一直线导轨15上的第一滑块16,第一滑块16和第一直线导轨15既可滑动又可固定的进行连接,切割主体10安装在第一滑块16上。其中,第一直线导轨15由第一底板11、第一加强板12、第二加强板13和第一安装板14垂直于放置自动掰瓶设备的平面固定。第一滑块16由第三加强板17、第二安装板18和第三安装板19与切割主体10进行连接。
具体地,如图2、图4和图5所示,第一加强板12和第二加强板13都与第一底板11和第一安装板14进行连接,第一加强板12和第二加强板13置于第一底板11之上,又分别置于第一安装板14的两侧,对第一底板11和第一安装板14进行加强固定,使得自动掰瓶设备更加坚固,延长使用寿命。而第一直线导轨15安装于第一安装板14上。第三加强板17与第一滑块16以及第二安装板18进行连接,对其进行固定,第二安装板18和第三安装板19进行连接,而第三安装板19与切割主体10中的夹爪驱动部110的一侧进行连接,使得切割主体10可以随第一滑块16的运动而运动。
为了将瓶头部41掰离待操作瓶4,掰瓶主体20包括掰瓶驱动部件210。其中,掰瓶驱动部件210与掰瓶部件213驱动连接,以驱动掰瓶部件213转动,以在掰瓶部件213转动的过程中,将瓶头部41掰离瓶体部42。具体地,本实施例中的掰瓶驱动部件210可设置为旋转电磁铁。
另外,为了将掰瓶驱动部件210与掰瓶主体20固定为一个相对的整体,掰瓶主体20还包括安装部件203。安装部件203安装在掰瓶驱动部件210上,掰瓶部件213安装在安装部件203上。
如图3所示,本实施例中安装部件203包括第五安装板211、第六安装板212和第七安装板29,其中,掰瓶驱动部件210与第七安装板29的一侧连接,掰瓶部件213安装于第六安装板212的下测,第七安装板29和第六安装板212由第五安装板211进行连接固定。
为了使掰瓶主体20可根据待操作瓶4的大小与尺寸,进行垂直于平面的运动,本实施例中的掰瓶机构2还包括第二直线导轨25和第二滑块26,第二滑块26既可移动又可固定地设置在第二直线导轨25上,掰瓶主体20安装在第二滑块26上。其中,第二直线导轨25由第二底板21、第四加强板22、第五加强板23和第四安装板24垂直于放置自动掰瓶设备的平面固定。第二滑块26由转接板27和第六加强板28与掰瓶主体20进行连接。
具体地,如图3、图6和图7所示,第四加强板22和第五加强板23都与第二底板21和第四安装板24进行连接,第四加强板22和第五加强板23置于第二底板21之上,又分别置于第四安装板24的两侧,对第二底板21和第四安装板24进行加强固定,使得自动掰瓶设备更加坚固,延长使用寿命。而第二直线导轨25安装于第四安装板24上。转接板27与第二滑块26以及第二直线导轨25进行连接,第六加强板28与转接板27和第二滑块进行连接,对其进行固定,而转接板27与安装部件203的一侧进行连接,使得掰瓶主体20可以随第二滑块26的运动而运动。
为了将待操作瓶4置于掰瓶部件213中,方便将瓶头部41掰离瓶体部42,掰瓶部件213包括第一掰动部201和第二掰动部202,第一掰动部201和第二掰动部202间隔设置,以形成定位槽214,当需要将待操作瓶4的瓶头部41掰离时,将瓶头部41置于定位槽214中。
具体地,本实施例中的自动掰瓶设备的具体结构为:
第一种具体结构为,如图1所示,为了将割瓶机构1和掰瓶机构2连接为一个相对固定的整体,自动掰瓶设备还包括连接板3,连接板3与割瓶机构1和掰瓶机构2均连接。
第二种具体结构为,为了使割瓶机构1和掰瓶机构2可运动的进行连接,自动掰瓶设备还包括主体驱动机构,主体驱动机构分别与割瓶机构1和掰瓶机构2驱动连接,以驱动割瓶机构1和掰瓶机构2分别运动至待操作位。
第三种具体结构为,为了使自动掰瓶设备适用于多种型号的待操作瓶4,自动掰瓶设备还包括瓶体定位机构,瓶体定位机构具有用于对待操作瓶进行定位的定位部,以通过定位部使待操作瓶保持固定。
本发明提供的自动掰瓶设备在使用过程中的操作步骤如下:
1)第一步:首先启动割瓶机构1,将第一滑块16调节至切割片114合适切割待操作瓶4的位置,将待操作瓶4的瓶颈部43置于第一夹爪103和第二夹爪104之间,再由夹爪驱动部110驱动夹爪组件102至合适位置,将瓶颈部43固定,最后在切割驱动部件115以及旋转驱动部件的驱动下,切割片114对瓶颈部43进行全方位切割,最终完成切割工作。
2)第二步:首先启动掰瓶机构2,将第二滑块26调价至掰瓶部件213合适掰取待操作瓶4的瓶头部41的位置,再将待操作瓶4的瓶头部41置于定位槽214中,最后在掰瓶驱动部件210的驱动下,掰瓶部件213将瓶头部41掰离瓶体部42,最终完成掰瓶工作。
从以上的描述中,可以看出,本发明上述的实施例实现了如下技术效果:
本发明提供的自动掰瓶设备通过设置割瓶机构1和掰瓶机构2,当待操作瓶4需要将瓶头部41掰离瓶体部42时,可以启动此自动掰瓶设备,利用先对瓶颈部43进行切割的方法,使得待操作瓶4在掰瓶的工程中不易产生玻璃碎渣,避免了由此发生的碎渣掉入瓶内不方便取出或伤害使用者本人的事故的发生,解决了现有技术中掰瓶方法容易产生玻璃碎片的问题。方便使用者操作,提高待操作瓶使用时的安全性,提高工作效率。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。