一种凸轮辅助的柔性连续体机器人单元及机器人
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及连续体机器人领域,特别是一种凸轮辅助的柔性连续体机器人单元及机器人。
背景技术
连续体机器人相比于传统的刚性关节机器人具有灵活性好、易于实现超冗余自由度等优势,更适合在狭小有限的空间中进行工作。而柔性单元具有易于小型化、无需润滑和运动平滑连续等一系列优点,所以将柔性单元同连续体机器人进行结合设计可以突破一些技术上的桎梏,在诸如航空和医疗等领域都有着非常广阔的应用前景。但由于柔性的连续体机器人具有弹性且容易弯曲,往往难以承受较大的扭转载荷和压载荷,影响机器人的操作精度,所以亟需研究设计一款新型的连续体机器人来解决相关问题。
发明内容
本发明的目的在于提供一种凸轮辅助的柔性连续体机器人单元及机器人,以解决上述问题。
为实现上述目的,本发明采用以下技术方案:
一种凸轮辅助的柔性连续体机器人单元,包括上单元块、柔性结构、凸轮高副和下单元块;上单元块和下单元块之间通过柔性结构进行连接;上单元块和下单元块间设置有凸轮高副;上单元块和下单元块的外围均分布有若干用于线驱动的穿线通孔。
进一步的,凸轮高副包括滑动支点和凸轮型接触辅助;滑动支点设置在上单元块的下表面,凸轮型接触辅助设置在下单元块的上表面;滑动支点和凸轮型接触辅助相切配合。
进一步的,滑动支点为若干个刚性凸起,凸轮型接触辅助为若干个与滑动支点个数一致的凸轮型刚体交错排布。
进一步的,若干个滑动支点的圆柱型侧面与对应的凸轮型接触辅助的凸轮轮廓面分别相切;滑动支点的侧面与凸轮型接触辅助的底面分别对应相切。
进一步的,柔性结构设置在上单元块和下单元块的两侧边缘或上单元块和下单元块之间。
进一步的,上单元块侧面设置有上侧面槽,下单元块侧面设置有下侧面槽,柔性结构过盈配合设置在上侧面槽和下侧面槽内。
进一步的,柔性结构为能够实现上下单元之间柔性连接的柔性铰链。
进一步的,一种凸轮辅助的柔性连续体机器人,包括若干个机器人单元;若干个机器人单元沿着轴线方向依次交错90°排布,多根驱动线依次穿过穿线通孔,连接形成机器人。
与现有技术相比,本发明有以下技术效果:
本发明的连续体机器人末端受到驱动线的施加的压力后,各相邻的两个单元块间受压,单元块绕着圆柱型接触辅助单元进行转动,同时使对应的柔性结构发生弯曲变形,以此使相邻的各个单元块之间产生相对运动。进一步通过驱动线的收紧和放松,可实现整体连续体机器人在较大空间内的变形。
由于连续体单元在受到某一载荷作用下运动时,滑动接触的凸轮高副的运动轨迹与在该载荷作用下的柔性结构的变形相吻合,这使得柔性结构可以在确定的轨迹下运动,而不会由于不规律的力、力矩等作用的原因导致的使用寿命短、建模复杂等问题。
由于连续体中间的关节部分采用了凸轮型接触辅助单元,所以连续体机器人单元可以承受非常大的压载荷,而不会失效;同时,由于滑动支点的侧面与凸轮型接触辅助的底面分别对应相切,限制了相应的自由度,使整体连续体机器人具有很高的抗扭刚度,提高了机器人运动的精度和负载能力。
本发明的结构简单,不需要复杂的加工方式,且机器人各部分的结构易于实现小型化,适合多个领域的应用。
附图说明
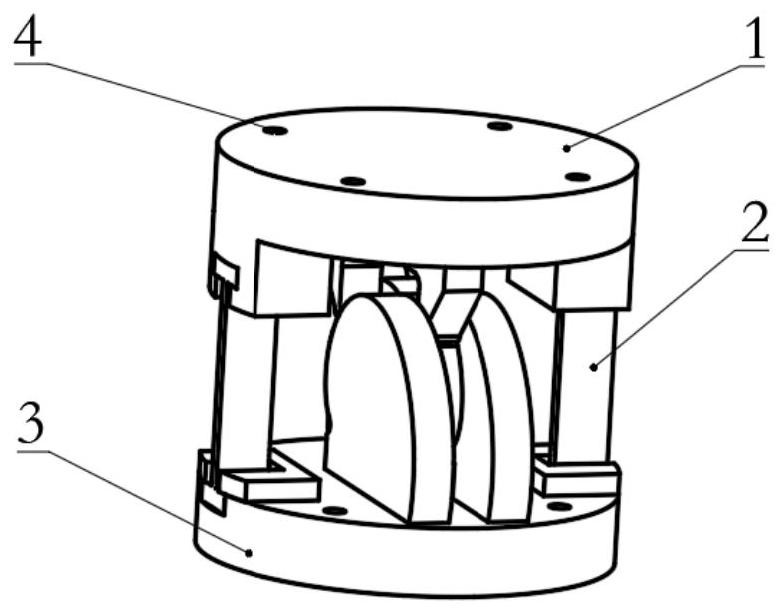
图1是本发明中,单个凸轮辅助的连续体机器人单元示意图;
图2是本发明中带有滑动支点的上单元块的示意图;
图3是本发明中柔性结构的示意图;
图4是本发明另一种柔性结构的安装示意图;
图5是本发明中带有凸轮型接触辅助的下单元块的示意图;
图6是本发明连续体机器人未发生变形时整体的示意图;
图7是本发明连续体机器人变形后整体的示意图;
图中,1、上单元块;2、柔性结构;3、下单元块;4、穿线通孔。
103是滑动支点101的圆柱型侧面;303是凸轮型接触辅助301的底面;104是滑动支点101的侧面。
具体实施方式
下面将结合附图对本发明进行更详细地描述:
请参阅图1至图7,一种凸轮辅助的柔性连续体机器人单元,包括带有滑动支点的上单元块1、柔性结构2、带有凸轮型接触辅助的下单元块3;所述的带有滑动支点的上单元块1和带有凸轮型接触辅助的下单元块3之间通过柔性结构2进行连接;带有滑动支点的上单元块1与带有凸轮型接触辅助的下单元块3间形成滑动接触的凸轮高副;上、下单元块的外围均分布有若干用于线驱动的穿线通孔4。在机器人工作时,相邻的上、下单元块之间受到压力,单元块沿着凸轮型接触辅助301的轮廓进行运动,同时使对应的柔性结构2发生弯曲变形,以此使相邻的各个单元块之间产生相对运动。
相邻的上、下单元块间的一个凸轮高副,由一组或多组滑动支点101和凸轮型接触辅助301形成的滑动摩擦副实现。其中一组滑动接触的凸轮高副由两个不同侧的滑动支点101和两个不同侧的凸轮型接触辅助301组成。
连续体单元在受到某一载荷作用下运动时,滑动接触的凸轮高副的运动轨迹恰好与在该载荷作用下的柔性结构2的变形相吻合;在不同载荷作用下,凸轮型接触辅助301对应有不同的轮廓。
若干个滑动支点101的圆柱型侧面与对应的凸轮型接触辅助301的凸轮轮廓面分别相切,形成凸轮高副,所以连续体机器人单元可以承受非常大的压载荷;滑动支点101的侧面与凸轮型接触辅助301的底面分别对应相切,限制沿连续体机器人单元轴线方向的扭转,使整体连续体机器人具有很高的抗扭刚度,提高了机器人运动的精度和负载能力。
柔性结构2的两端分别与上单元块侧面槽102及下单元块侧面槽302过盈配合及胶水胶合等,安装固定于上、下单元块;柔性结构2均为等截面或变截面的弹性板或弹性梁或交叉簧片。
一种凸轮辅助的柔性连续体机器人,还包括驱动线;若干个凸轮辅助的柔性连续体机器人单元,依次交错排布并连接固定,若干根驱动线依次穿过穿线通孔4,构成如图5所示的凸轮辅助的柔性连续体机器人,通过驱动线的收紧和放松,可实现整体连续体机器人在较大空间内的变形。
实施例:
一种凸轮辅助的柔性连续体机器人,包括带有滑动支点的上单元块1、柔性结构2、带有凸轮型接触辅助的下单元块3。柔性结构2的中间部分为矩形截面。各单元块之间,通过柔性结构2的两端与上单元块侧面槽102及下单元块侧面槽302的过盈配合等进行安装固定。相邻两个上、下单元块之间通过滑动支点101和凸轮型接触辅助301,实现连续体机器人单元的凸轮高副运动。各相邻的两个单元块,沿着整体连续体机器人的轴线方向依次交错90°排布,多根驱动线依次穿过穿线通孔4。由此形成图5所示的,包含有9个连续体单元的整体的连续体机器人。
带有滑动支点的上单元块1和带有凸轮型接触辅助的下单元块3是刚体;柔性结构2为可变形的柔性材料。
在带有滑动支点的上单元块1和带有凸轮型接触辅助的下单元块3的外围的同一圆周上,间隔90°均匀分布有4个穿线通孔4,穿线通孔4的孔径为1mm。驱动线依次经过穿线通孔4之后,驱动线的一端固定在连续体机器人的末端,另一端与连续体机器人的驱动结构、控制器等进行连接固定。在完成线的驱动之后,连续体机器人可弯曲成如图6所示的一种状态。