自动导引车定位系统及其操作方法
文献发布时间:2023-06-19 11:45:49
技术领域
本公开关于一种自动导引车定位系统,特别是可以通过扫描定位图案来定位自动导引车的自动导引车定位系统。
背景技术
现有自动导引车(automatic guided vehicle;AGV)技术,对于环境皆有一定需求,而基于环境物理轮廓定位方法又为一现有成熟技术。举例来说,习知的自动导引车可使用激光雷达来侦测周围环境的轮廓,从而确定或定位自动导引车。
然而,当遇到环境相似时(即多个地点的周围环境的轮廓彼此相似),通常会在环境额外增加反光片或目标块物体,使相似之环境能有不一样的特征,达到辨识定位,而如果发生大量环境相似时,除增加反光片或目标块物体外,亦有改变其大小、外型轮廓等方法。但这些做法除了建置方法复杂,亦十分难达到数百种差异,更无法扩增至数千种差异。
公开内容
本公开的目的为提升自动导引车定位技术的可靠度。
本公开提供一种自动导引车定位系统。自动导引车定位系统包括多个定位区域和自动导引车。多个定位区域设置在空间中,其中定位区域具有定位图案。自动导引车包括光束发射器、光束接收器以及处理器。光束发射器被配置以发射光束来扫描定位区域之一者。光束接收器被配置与光束发射器相隔特定距离,其中光束接收器接收定位区域之一者中的相应定位图案以外的区域所散射的光束。处理器被配置以根据光束接收器所接收的光束,辨识相应定位图案,并且根据相应定位图案定位自动导引车。
本公开提供一种自动导引车定位系统的操作方法。自动导引车定位系统之操作方法包括在空间中设置多个定位区域,其中定位区域具有定位图案;扫描定位区域之一者;接收定位区域之一者中的相应定位图案以外的区域所散射的光束;以及根据所接收的光束,辨识相应定位图案,并且根据相应定位图案定位自动导引车。
本公开通过上述实施例,可以容易制造具有多种差异的定位图案,以在具有更多相似环境的空间中制造差异。
附图说明
为了使本公开的描述方式能涵盖上述的举例、其他优点及特征,上述简要说明之原理,将通过图式中的特定范例做更具体的描述。此处所示的图式仅为本公开的范例,并不能对本公开的范围形成限制,本公开的原理通过附图以进行具有附加特征与细节的描述与解释,其中:
图1A是根据本公开实施例的自动导引车定位系统的局部示意图。
图1B是根据本公开实施例的自动导引车定位系统的俯视示意图。
图1C是根据本公开实施例的定位图案的示意图。
图2是根据本公开实施例的在自动导引车定位系统中的自动导引车扫描定位图案的示意图。
图3A是根据本公开实施例的逆反射原理的示意图。
图3B是根据本公开实施例的逆反射射材料和结构的示意图。
图4A是根据本公开实施例的侦测模块侦测具有逆反射材质和非逆反射材质的表面的示意图。
图4B是根据本公开实施例的侦测模块扫描表面所得到的影像的示意图。
图5是根据本公开实施例的自动导引车定位系统的操作方法的流程图。
附图标记说明
SP~空间
SP1~地板
SP2天花板
100~自动导引车定位系统
102~自动导引车
104~侦测模块
106~处理器
108~定位区域
110-1、110-2、110-3~标记物体
A、B、C~地点
112-1~定位图案
SP’~空间
SP1’~地板
SP2’~天花板
202~自动导引车
204~侦测模块
204-1~光束发射器
204-2~光束接收器
d~特定距离
206~表面
208~定位区域
210~定位图案
212~非逆反射区
214~影像
214-1~暗区
214-2~亮区
302~非逆反射材质
304~粗糙表面
306、312、314~方向
308~逆反射材质
310~逆反射表面
316~圆珠结构
318~棱镜结构
402~侦测模块
404~光束发射器
406~光束接收器
408~表面
410~逆反射区
412~非逆反射区
414、416、418、420~方向
422~影像
424~暗区
426~亮区
500~操作方法
502-508~操作
具体实施方式
本公开提供许多不同的实施例或范例以实施本公开的不同特征。以下的公开内容叙述各个构件及其排列方式的特定范例,以简化说明。当然,这些特定的范例并非用以限定。举例来说,若是本公开书叙述了一第一特征形成于一第二特征之上或上方,即表示其可能包含上述第一特征与上述第二特征是直接接触的实施例,亦可能包含了有附加特征形成于上述第一特征与上述第二特征之间,而使上述第一特征与第二特征可能未直接接触的实施例。另外,以下公开不同范例可能重复使用相同的参考符号及/或标记。这些重复为了简化与清晰的目的,并非用以限定所讨论的不同实施例及/或结构之间有特定的关系。
为本公开内容的详述目的,除非特定否认,单数词包含复数词,反之亦然。并且字词“包含”其意为“非限制性地包含”。此外,进似性的(approximation)用语例如“大约”、“几乎”、“相当地”、“大概”等,可用于本公开实施例,其意义上如“在、接近或接近在”或“在3至5%内”或“在可接受制造公差内”或任意逻辑上之组合。
此外,其与空间相关用词。例如“在…下方”、“下方”、“较低的”、“上方”、“较高的”及类似的用词,系为了便于描述图标中一个组件或特征与另一个(些)组件或特征之间的关系。除了在图式中绘示的方位外,这些空间相关用词意欲包含使用中或操作中的装置的不同方位。举例来说,若在示意图中的装置被反转,被描述在其他组件或特征之“下方”或“在…下方”的组件也会因而变成在另外其他组件或特征之“上方”。如此一来,示范词汇“下方”会涵盖朝上面与朝下面之两种解读方式。除此之外,设备可能被转向不同方位(旋转90度或其他方位),则在此使用的空间相关词也可依此相同解释。
习知的自动导引车可通过扫描周围环境的轮廓,建立地图来定位。此技术可称为同步定位与地图构建(Simultaneous localization and mapping,SLAM)。举例来说,自动导引车可在运作时,通过雷射、红外线等合适光束扫描一个空间(例如:仓库)中的环境轮廓,建立此空间的地图,从而在空间中定位自动导引车。
然而,空间中可具有许多环境相似的区域。举例来说,随着空间中物体(例如:货物)的堆栈,空间中的多个走道或十字路口等地点会彼此相似。当自动导引车行经这些具有相似环境的地点时,自动导引车可能会迷失导航,导致误判其在地图之正确位置。
因此,可以将标记物体(例如:反光板、目标块等)额外设置在这些具有相似环境的地点,使得这些地点的环境具有环境差异。通常来说,可以设计标记物体的数量、大小、形状轮廓等,以增加环境差异的数量。然而,随着空间的增大,相似环境的地点数量也增加,设计标记物体所造成的环境差异的数量已无法满足。另外,制造不同数量、大小、形状轮廓的标记物体亦需要较高成本。
图1A是根据本公开实施例的自动导引车定位系统的局部示意图。图1B是根据本公开实施例的自动导引车定位系统的俯视示意图。自动导引车定位系统100包括自动导引车102。自动导引车102设置在空间SP的地板SP1上,并且可沿着地板SP1移动。自动导引车102包括侦测模块104、处理器106。如上面所述,自动导引车102可通过侦测模块104侦测(扫描)空间SP之环境轮廓,以建立空间SP之地图进行定位。
自动引导车102可以搬运一或多个货物,并且自动引导车102可包括其他装置或部件,例如显示器、防碰撞传感器或其他用于自动引导车之部件,或其组合。
侦测模块104可以是深度摄影机、轮廓扫描机、雷射测距仪、激光雷达等可以侦测环境轮廓的合适装置。更具体来说,侦测模块104可具有光束发射器104-1(未显示)和光束接收器104-2(未显示),以通过光束发射器104-1发射光束至周围环境(用光束扫描周围环境),并接收周围环境反射(散射)回光束接收器104-2,使得处理器106可根据所接收的光束得到周围环境的轮廓并建立空间SP之地图来定位自动引导车102。光束发射器104-1可发射光束,例如激光束、红外光束或用于扫描周围环境的其他合适光束。光束接收器104-2可接收反射的激光束、红外光束或光束发射器104-1所发射的用于扫描周围环境的其他合适光束。
处理器106可实质上为一完全自足式计算系统,并包含单核处理器或多核处理器、总线、内存控制器、高速缓存或其他电子装置,或其组合。多核处理器可为对称或非对称处理器。在本公开实施例中,处理器106可以根据光束接收器104-2所接收的光束执行计算、判断和模拟。
在一些实施例中,处理器106可独立于自动引导车102之外(即处理器106在外部装置(例如:计算机)中),而自动引导车102可包括传输装置(例如:无线传输装置)将光束接收器104-2所接收的光束的结果传输至处理器106,以进行计算、判断和模拟。
如果空间SP具有许多相似环境的区域(例如:图1B之地点A、B、C具有相似环境),可以额外设置标记物体在这些区域中以作出环境差异。举例来说,图1A亦可为对应图1B之地点A的示意图,在图1A中,在空间SP的天花板SP2设置定位区域108,并且定位区域108上具有一或多个标记物体110-1(举例说明,如图1A显示一个标记物体110-1),使得此空间SP的区域与其他具有相似环境的区域(例如:地点B、C个别地具有与标记物体110-1不同数量、形状或大小的标记物体110-2、110-3)作出环境差异(即天花板104-2的轮廓改变)。应理解标记物体110-1可设置在其他地方(例如:空间SP的墙壁或货架)。在此实施例中,标记物体110-1被设置在天花板SP2,使得标记物体110-1较不会占据空间SP的地面空间或较不会受到货物堆栈的影响(例如:被货物阻挡),
如上面所述,如果空间SP具有更多相似环境的区域,设置在这些区域中的标记物体所能造成的环境差异的数量可能无法满足,并且增加制造成本。因此,在本公开实施例中,标记物体的下表面可具有定位图案以进一步在相似环境中形成环境差异。图1C是根据本公开实施例之定位图案的示意图。标记物体110-1的下表面(朝向地板SP1的表面)上具有定位图案112-1。自动导引车102可通过侦测模块104扫描定位图案112-1,从而通过处理器106辨识定位图案112-1来定位自动导引车102。举例来说,定位图案112-1是“A”,因此侦测模块104扫描定位图案112-1后,处理器106辨识出定位图案112-1是“A”,就可以得到自动导引车102是在空间SP的地点A。
相似地,地点B的标记物体110-2的定位图案(未显示)和地点C的标记物体110-3的定位图案(未显示)可各别是“B”和“C”,当自动导引车102行经地点B或地点C,可通过辨识相应的定位图案来定位自动导引车102在空间SP的位置(或坐标)。
应理解在一些实施例中,在空间SP中,标记物体可以省略,并且在具有相似环境的区域个别地设置不同定位图案以作出环境差异。举例来说,图1B的标记物体110-1至110-3可省略,并且可以直接在地点A、B、C的天花板SP2的相应定位区域(例如:地点A的定位区域108)上设置定位图案112-1至112-3。如此一来,可以减少制造标记物体的成本。
定位图案可以是各种文字、符号、数字或其他几何图案。定位图案可为平面物体,定位图案为逆反射材质构成的一面,另一面具有黏着性。因此,定位图案可以容易制造并且容易设置在任何区域,并在空间中相似之环境可制造出多种以上之差异以作区别。
自动导引车102更包括储存装置(未显示),储存装置具有对应定位图案的坐标查找表。当处理器辨识相应定位图案后,可使用坐标查找表定位自动导引车102。坐标查找表事先已记录并储存在储存装置,包括地位图案或SLAM地图等等。在一实施例中,在图1B的地点A的相应定位图案112-1可为正三角形图案,而自动导引车102的储存装置中的坐标查找表具有相应正三角形图案的空间SP坐标信息。当自动导引车102行经地点A,扫描定位图案112-1而辨识出正三角形图案后,可以使用坐标查找表得到相应正三角形图案的空间SP坐标信息,从而定位自动导引车102。
在另一些实施例中,定位图案可以是QR码,QR码具有与空间SP相关的坐标信息或定位信息。举例来说,图1B的地点A、B和C在空间SP的坐标信息或定位信息被编码成QR码,QR码的图案被用来作定位图案。当自动导引车行经地点A、B或C时,可以扫描并译码相应QR码以得到相应的坐标或定位信息。
后续说明自动导引车扫描定位图案的技术。
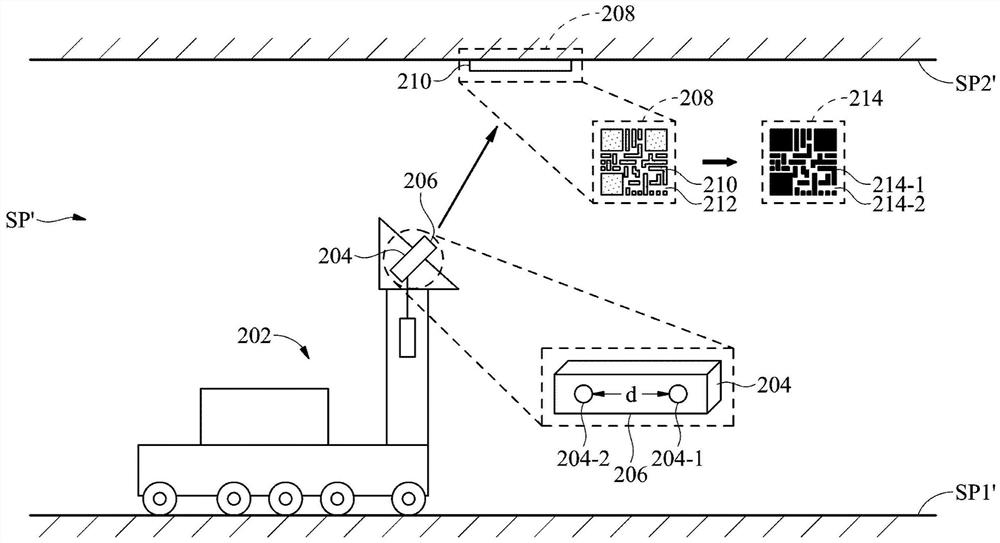
图2是根据本公开实施例的在自动导引车定位系统中的自动导引车扫描定位图案的示意图。自动导引车202在空间SP’中,并且在空间SP’的天花板SP2’设置有定位区域208。定位区域208具有定位图案210。如上面所述,定位图案的一面由逆反射材质构成(此面朝向地板SP1’),因此在此定位区域208中定位图案210亦可称为逆反射区,而定位区域208中定位图案210以外的区域可称为非逆反射区212。自动导引车202更包括侦测模块204,侦测模块204的表面206包括光束发射器204-1和光束接收器204-2,并且光束发射器204-1和光束接收器204-2彼此相隔一个特定距离d,距离d在光束接收器204-2可接收到反射或散射的光束(光束发射器204-1所发射)的范围内,并且光束接收器204-2接收到逆反射的光束之范围外。相似地,应理解定位区域208(定位图案210)可设置在其他地方。
如图2所示,自动导引车202通过光束发射器204-1扫描定位区域208(如箭头所示),以侦测和辨识定位图案210。当光束发射器204-1所发射的光束到达定位区域208后,定位图案210会将光束以与光束的入射方向相反的方向反射,而非逆反射区212会将光束往四面八方散射。由于光束发射器204-1和光束接收器204-2彼此相隔一个特定距离d,定位图案210所反射的光束会逆反射回光束发射器204-1,而不会反射到光束接收器204-2,并且光束接收器204-2接收非逆反射区212所散射的光。换句话说,光束接收器204-2可接收定位图案210以外的区域(例如非逆反射区212)所散射的光束。因此,侦测模块204可得到影像214,影像214包括暗区214-1和亮区214-2,暗区214-1由不反射回光束接收器204-2的光束所导致(即定位图案210所反射的光束),亮区214-2由非逆反射区212所散射的光所导致(光束接收器204-2实际接收到的光)。如此一来,自动导引车202的处理器可以根据影像214的暗区214-1和亮区214-2(即所接收的的光束)辨识定位图案210。
图3A是根据本公开实施例的逆反射原理的示意图。非逆反射材质302具有粗糙表面304,当入射光沿着方向306到达非逆反射材质302后,反射光会散射(漫射)至周围环境。非逆反射材质可以是纸、布、水泥、磁砖、塑料、一般材料或其他不会将光逆反射的材料。逆反射材质308具有由逆反射材料构成的逆反射表面310,当入射光沿着方向312到达逆反射材质308后,反射光会沿着与方向306相反的方向314逆反射。逆反射材料可以是具有特殊结构之材料,例如玻璃、压克力或其他可折射光束的材料。在所述实施例中,标记物体110-1至110-3、天花板SP1和SP1’可为非逆反射材质。在一些实施例中,非逆反射材质和逆反射材质共同构成一平面物体,而逆反射材质之部分作为定位图案。
如图3B所示,逆反射材料可以是圆珠结构316、棱镜结构318或其他可将入射光以与入射光之入射方向相反的方向反射入射光的结构(在结构中可发生多个反射及/或折射)。
图4A是根据本公开实施例的侦测模块侦测具有逆反射材质和非逆反射材质的表面的示意图。侦测模块402具有光束发射器404和光束接收器406,其中光束发射器404和光束接收器406相距特定距离d。光束发射器404发射光束扫描具有逆反射区410和非逆反射区412的表面408。在此实施例中,以方向414作为光束至逆反射区410的方向的示例,方向416作为光束至非逆反射区416的方向的示例。逆反射区410由逆反射材质构成,非逆反射区412由非逆反射材质构成。如上面所述,发射至逆反射区410的光束会被逆反射回光束发射器404(沿着与方向414相反的方向418),而发射至非逆反射区412的光束会被散射(沿着多个方向420)。由于光束发射器404和光束接收器406相距特定距离d,逆反射区410所反射的光束不被光束接收器406接收,而非逆反射区412所散射的光束的一部份被光束接收器406接收。换句话说,光束接收器204-2可接收逆反射区410以外的区域(非逆反射区412)所散射的光束。另外,应可理解特定距离d被设计以使光束接收器406不会接收到逆反射区410所反射的光束。
图4B是根据本公开实施例的侦测模块402扫描图4A的表面408所得到的影像的示意图。侦测模块402扫描表面408得到影像422。如上面所述,由于光束接收器406不会接收到逆反射区410所反射的光束,侦测模块402得到的影像422具有暗区424,而被非逆反射区412散射至光束接收器406的光束在影像422形成亮区426。如此一来,自动导引车的处理器可以辨识影像422的暗区424和亮区426(即光束接收器406所接收的光束)构成的图案。
参照图3A至图4B的实施例和说明,可理解图1和图2的自动导引车扫描和辨识定位图案之原理。图5是根据本公开实施例的图1和图2的自动导引车定位系统的操作方法500的流程图。在操作502中,在空间中设置多个定位区域,其中定位区域各自具有相应的定位图案。
在操作504中,发射光束扫描定位区域之一者。举例来说,自动导引车202的侦测模块204的光束发射器204-1发射光束扫描定位区域208。
在操作506中,接收定位区域的相应定位图案以外的区域所散射的光束。举例来说,光束接收器204-2接收定位区域208的定位图案210以外的区域(例如非逆反射区域212)所散射的光束发射器204-1所发射的光束。
在操作508中,根据所接收的光束,辨识相应定位图案,并且根据相应定位图案定位自动导引车。举例来说,自动导引车202根据所接收的光束(定位图案210以外的区域所散射的光束构成的影像),辨识定位图案210,并且根据定位图案210定位自动导引车202。具体来说,自动导引车202可以辨识定位图案210,译码定位图案210具有的与空间SP’相关的坐标信息,以定位自动导引车202。或者,自动导引车202包括具有对应定位图案的坐标查找表的储存装置。当自动导引车202辨识相应定位图案后,可使用坐标查找表定位自动导引车202。
在习知的自动导引车定位系统中,自动导引车使用侦测模块(例如激光雷达)扫描周围环境以定位自动导引车,并且通过标记物体(反光板、目标块)以在空间中相似环境制造差异以防自动导引车迷失。然而,制造标记物体耗费许多成本,并且难以制造出多种差异以区别相似环境来防止自动导引车迷失。
通过使用本公开实施例,可以容易制造具有千种以上的差异的定位图案,以在具有更多相似环境的空间中制造差异。另外,定位图案由逆反射材质制造,通过使用相隔特定距离的光束发射器和光束接收器,自动导引车可以快速而有效率地得到定位图案之影像,以识别定位图案来定位自动导引车。
另外,本公开实施例可避免习知影像辨识技术所受到的外在环境光的影响。具体来说,习知影像辨识技术是通过接收物体反射外在环境光(例如可见光)来得到影像。因此,容易受到外在环境光的变化而难以得到影像。相反地,本公开实施例使用光束发射器发射特定种类光束(雷射、红外光等),而使用光束接收器接收反射的特定种类光束,因此可不受到外在环境光的影像。在一些实施例中,本公开实施例的自动导引车定位系统可在黑暗环境中运作,而仍可定位自动导引车。
此处所使用的术语仅用于描述特定实施例的目的,并且不限制本公开。如此处所使用的,除非上下文另外清楚的指出,否则单数形式“一”、“一个”以及“该”意旨在也包括多个形式。此外,就被用于详细描述及/或申请专利范围中的“囊括”、“包含”、“具有”、“有”、“含”或其变体的术语来说,这些术语旨在以相似于“包括”的方式而具有包容性。
除非另外定义,否则此处所使用的所有术语(包括技术和科学术语)具有与所属技术领域具有通常知识者通常理解的相同含义。此外,诸如在通用字典中定义的那些术语应该被解释为具有与其在相关领域的上下文中的含义中相同的含义,并且不会被理解为理想化或过度正式,除非在此处有明确地如此定义。
前述内文概述了许多实施例的特征,使本技术领域中具有通常知识者可以从各个方面更佳地了解本公开。本技术领域中具有通常知识者应可理解,且可轻易地以本公开为基础来设计或修饰其他工艺及结构,并以此达到相同的目的及/或达到与在此介绍的实施例等相同之优点。本技术领域中具有通常知识者也应了解这些相等的结构并未背离本公开的公开精神与范围。在不背离本公开的公开精神与范围之前提下,可对本公开进行各种改变、置换或修改。
- 自动导引车定位系统及其操作方法
- 自动导引运输车定位方法、定位系统及自动导引运输系统