具有可附接/可拆卸手柄的容器
文献发布时间:2023-06-19 12:16:29
技术领域
本公开涉及一种具有可附接/可拆卸手柄的容器,并且更具体地涉及一种可以防止容器和手柄之间的移动的具有可附接/可拆卸手柄的容器。
背景技术
通常,为了使用方便,手柄可以联接到用于烹饪各种食物的容器上。也就是说,附接到容器的手柄允许用户烹饪,同时甚至在热量通过诸如燃气灶这样的加热装置传递到容器本身时保护用户免受高热。
传统容器的手柄固定地联接到容器,使得容器和手柄牢固地固定。因此,即使用户抓住手柄并烹饪,容器也不会从手柄移开。同时,当储存多个容器时,一个容器的手柄部分与另一个容器的主体干涉或碰撞,这有损坏的风险。此外,此类传统容器占用大量储存空间。
为了解决具有固定手柄的容器的问题,公开了一种具有手柄的容器,该手柄相对于容器可拆卸设置。然而,在具有可附接/可拆卸手柄的传统容器的情况下,如果手柄联接到容器,当用户握住手柄时,由于容器和手柄之间的间隙,容器移动,例如摇动。由于这种移动,用户烹饪不容易且不方便,也增加了用户发生安全事故的风险。
发明内容
技术问题
因此,本公开旨在提供一种具有可附接/可拆卸手柄的容器,其可以通过将手柄无间隙地联接到容器来防止容器和手柄之间的移动。
此外,本公开旨在提供一种具有可附接/可拆卸手柄的容器,其中手柄可以方便地且容易地附接到容器。
技术解决方案
在本公开的一个方面,提供了一种具有可附接/可拆卸手柄的容器,该容器包括:紧固构件,该紧固构件具有联接到容器的一侧,并且具有在所述紧固构件的与所述一侧相反的另一侧形成的紧固部分;可拆卸阻挡构件,该可拆卸阻挡构件具有止动构件,该止动构件可拆卸地联接到紧固构件的紧固部分;以及手柄主体,可拆卸阻挡构件联接到该手柄主体,其中止动构件包括:移动轴,该移动轴在纵向方向上形成并配置成能够移动;以及头部,该头部联接到移动轴,其中头部包括:第一部分,该第一部分联接到移动轴;以及第二部分,该第二部分联接到第一部分并配置成能够接触紧固部分,其中头部与移动轴一起移动以接触紧固部分。
此外,第二部分可以以移动轴为基准倾斜,并且头部可以在头部的第二部分与紧固部分接触的状态下沿着第二部分的倾斜表面移动,然后停止。
另外,第二部分可以形成为以移动轴为基准比移动轴更向下倾斜。
此外,头部的第二部分可以与紧固部分接触地移动,使得头部通过接触可拆卸阻挡构件和紧固构件中的至少一者而停止。
此外,头部可以包括联接到第二部分的第三部分,并且第二部分可以以移动轴为基准倾斜,并且第三部分也可以以移动轴为基准倾斜。
此外,在第二部分和移动轴之间形成的第一角度可以以移动轴为基准向下形成,并且在第三部分和移动轴之间形成的第二角度可以以移动轴为基准向上形成。
此外,以锐角为基准,第一角度可以小于第二角度。
此外,第一部分和移动轴可以联接成彼此相交。
此外,可拆卸阻挡构件可以包括阻挡主体,该阻挡主体具有供紧固构件插入所述阻挡主体中的空间,阻挡主体具有形成在所述阻挡主体中的穿孔;弹性构件,该弹性构件插入阻挡主体的穿孔中;以及杆,该杆联接到止动构件,其中止动构件可以插入到穿孔中并且联接到弹性构件以接收弹力,并且紧固到形成在紧固构件中的紧固部分。
此外,可拆卸阻挡构件可以包括阻挡主体,该阻挡主体具有供紧固构件插入所述阻挡主体中的空间,阻挡主体具有形成在所述阻挡主体中的穿孔;弹性构件,该弹性构件联接到阻挡主体;以及杆,该杆联接到止动构件和弹性构件,并且止动构件可以插入穿孔中并且联接到杆以接收来自联接到杆的弹性构件的弹力,并且紧固到形成在紧固构件中的紧固部分。
此外,穿孔可以在与容器的外周表面正交的虚拟水平线上倾斜,并且移动轴沿着倾斜的穿孔插入。
此外,紧固构件可以具有倾斜部分,并且头部可以与紧固构件的倾斜部分接触地沿着倾斜部分移动,然后停止。
此外,头部可以与紧固构件的倾斜部分接触地沿着倾斜部分移动,然后通过接触可拆卸阻挡构件和紧固构件中的至少一者而停止。
此外,头部可以包括联接到第二部分的第三部分,并且头部可以在第二部分和第三部分相遇的连接点处接触倾斜部分,并且配置成在连接点与紧固构件的倾斜部分接触的状态下沿着紧固构件的倾斜部分移动。
此外,头部可以包括联接到第一部分的第四部分,并且头部可以在头部的第四部分首先与可拆卸阻挡构件接触的状态下移动,并且头部可以在头部的第二部分接触紧固部分时停止。
此外,头部可以包括联接到第一部分的第四部分,紧固构件可以包括倾斜部分,并且头部可以在头部的第四部分首先与可拆卸阻挡构件接触的状态下移动,并且头部可以在头部的另一部分接触紧固构件的倾斜部分时停止。
同时,在本公开的另一方面,提供了一种具有可附接/可拆卸手柄的容器,该容器包括:紧固构件,该紧固构件具有形成在所述紧固构件的一侧的紧固部分和形成在所述紧固构件的与所述一侧相反的另一侧的联接槽,紧固构件具有形成在一侧和另一侧之间的预定的空间,其中所述紧固构件的具有紧固部分的一侧固定地联接到容器;可拆卸阻挡构件,该可拆卸阻挡构件具有止动构件,该止动构件可拆卸地联接到紧固构件的紧固部分;以及手柄主体,可拆卸阻挡构件联接到该手柄主体,其中止动构件包括:移动轴,该移动轴在纵向方向上形成并配置成能够移动;以及头部,该头部联接到移动轴,其中头部包括:第一部分,该第一部分联接到移动轴;以及第二部分,该第二部分联接到第一部分并配置成能够接触紧固部分,其中头部与移动轴一起移动以接触紧固部分。
此外,可拆卸阻挡构件可以包括阻挡主体,该阻挡主体具有插入紧固构件的空间中的突起,并且具有形成在所述阻挡主体中的穿孔,该阻挡主体联接到联接槽;弹性构件,该弹性构件插入阻挡主体的穿孔中;止动构件,该止动构件插入到穿孔中并且联接到弹性构件以接收弹力,并且紧固到形成在紧固构件中的紧固部分;以及杆,该杆联接到止动构件。
此外,联接槽可以形成为使得联接槽的分离间隔从上侧到下侧逐渐增大。
此外,突起可以形成为具有从上侧到下侧逐渐增大的宽度,以对应于联接槽。
有利效果
因此,在本公开的实施例中,由于可拆卸阻挡构件无间隙地联接到紧固构件,所以可以防止容器和手柄之间的移动。
此外,由于如果用户仅握住手柄并在靠近容器的位置在预定方向上移动就可以将手柄和容器联接,所以手柄可以方便地且容易地联接到容器。
附图说明
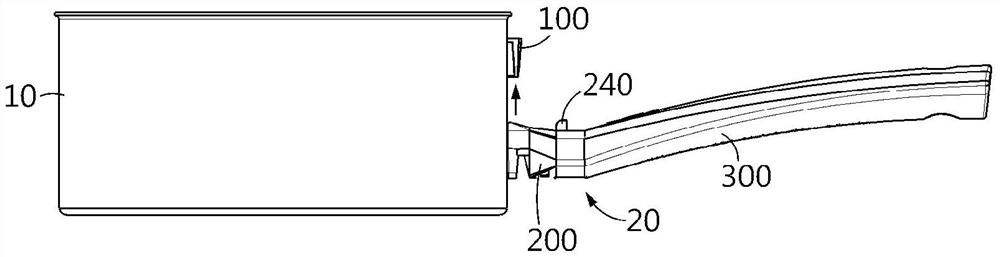
图1是透视图,其示出了根据本公开的第一实施例的具有可附接/可拆卸手柄的整个容器,其中手柄联接到容器。
图2是透视图,其示出了根据本公开的第一实施例的具有可附接/可拆卸手柄和紧固构件的容器,其中手柄与容器分离。
图3是侧视图,其用于图示在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中,手柄联接到容器。
图4是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中,紧固构件联接到手柄。
图5是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中,紧固构件从手柄上移除。
图6是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的可拆卸阻挡构件的阻挡主体。
图7是示出了图6的阻挡主体的前视图。
图8是侧视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中,止动构件联接到紧固构件的紧固槽。
图9是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的紧固构件的一侧。
图10是侧视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的紧固构件。
图11是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的紧固构件的另一侧。
图12是截面图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中,紧固构件插入到可拆卸阻挡构件中。
图13是截面图,其示出了从图12中移除的止动构件和紧固构件。
图14(a)和图14(b)是示例性的图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的施加到止动构件的移动轴的力。
图15是截面图,其示出了在根据本公开的第二实施例的具有可附接/可拆卸手柄的容器中,紧固构件插入到可拆卸阻挡构件中。
图16是截面图,其示出了在根据本公开的第三实施例的具有可附接/可拆卸手柄的容器中,紧固构件插入到可拆卸阻挡构件中。
图17是透视图,其示出了根据本公开的第四实施例的具有可附接/可拆卸手柄的整个容器,其中紧固构件联接到手柄。
图18是图17的侧截面图。
图19是透视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的手柄主体。
图20是透视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的可拆卸阻挡构件的阻挡主体。
图21是透视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的紧固构件的一侧。
图22是侧视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的紧固构件。
图23是透视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的紧固构件的另一侧。
图24是侧截面图,其示出了在根据本公开的第五实施例的具有可附接/可拆卸手柄的容器中,紧固构件附接到手柄。
图25是透视图,其示出了在根据本公开的第五实施例的具有可附接/可拆卸手柄的容器中的可拆卸阻挡构件的阻挡主体。
图26是侧视图,其示出了根据图8的另一实施例的止动构件接触紧固构件的一侧端。
图27是侧视图,其示出了在根据本公开的第六实施例的具有可附接/可拆卸手柄的容器中,止动构件联接到紧固构件的紧固槽。
图28至图30是示意图,其用于图示一个过程,在该过程中,在根据本公开的第六实施例的具有可附接/可拆卸手柄的容器中,止动构件联接到紧固构件的紧固槽。
图31和图32是示意图,其示出了在根据本公开的第七实施例的具有可附接/可拆卸手柄的容器中,止动构件的头部沿着紧固构件的倾斜部分移动。
图33和图34是示意图,其示出了在根据本公开的第八实施例的具有可附接/可拆卸手柄的容器中,止动构件的头部联接到紧固构件。
图35和图36是示意图,其示出了在根据本公开的第九实施例的具有可附接/可拆卸手柄的容器中,止动构件的头部联接到紧固构件。
具体实施方式
在下文中,将参考附图详细地描述本公开的优选实施例。在描述之前,应当理解,说明书和所附的权利要求书中使用的术语不应被解释为限于通常意义和字典意义,而应当在允许发明人为了最佳解释而适当定义术语的原则的基础上基于与本公开的技术方面相对应的意义和构思来解读。因此,本文提出的描述仅仅是为了图示的目的的优选实例,而不是旨在限制本公开的范围,因此应该理解,在不脱离本公开的范围的情况下,可以对其作出其它等同物和修改。
在附图中,为了方便和清楚地进行描述,每个元件或该元件的特定部分的尺寸可以被放大、省略或示意性地图示。因此,每个元件的尺寸并不完全反映该元件的实际尺寸。如果与本公开相关联的众所周知的功能或元件的详细描述不必要地模糊了本公开的主题,则将省略该详细描述。
本文使用的术语“联接”或“连接”不仅可以是指一个构件和另一个构件直接组合或直接连接的情况,而且可以是指一个构件通过连接构件与另一个构件间接组合或间接连接的情况。
图1是透视图,其示出了根据本公开的第一实施例的具有可附接/可拆卸手柄的整个容器,其中手柄联接到容器,图2是透视图,其示出了根据本公开的第一实施例的具有可附接/可拆卸手柄和紧固构件的容器,其中手柄与容器分离,图3是侧视图,用于图示手柄联接到容器,其中容器具有根据本公开的第一实施例的可附接/可拆卸手柄,图4是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中,紧固构件联接到手柄,图5是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中,紧固构件从手柄上移除,图6是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的可拆卸阻挡构件的阻挡主体,图7是图6的阻挡主体的前视图,图8是侧视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中,止动构件联接到紧固构件的紧固槽,图9是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的紧固构件的一侧,图10是侧视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的紧固构件,图11是透视图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的紧固构件的另一侧,图12是截面图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中,紧固构件插入到可拆卸阻挡构件中,图13是截面图,其示出了从图12中移除止动构件和紧固构件;以及图14(a)和图14(b)是示例性示意图,其示出了在根据本公开的第一实施例的具有可附接/可拆卸手柄的容器中的施加到止动构件的移动轴的力。
根据本公开实施例的包括可附接/可拆卸手柄20的容器10包括紧固构件100、可拆卸阻挡构件200和手柄主体300。在本说明书中,可以将可附接/可拆卸手柄20限定为是指可拆卸阻挡构件200所联接到的手柄主体300,即限定为包括可拆卸阻挡构件200和手柄主体300。此外,可拆卸阻挡构件200和手柄主体300可以制造为一体式,或者可以制造为可拆卸式。
参考图1和图2,紧固构件100固定地联接到容器10。紧固构件100可以以各种方式联接到容器10,并且可以例如通过各种焊接方法联接到容器10。另选地,紧固构件100可以以可拆卸的方式附接到容器10,以便能够附接到容器10和从容器10拆卸。参考图9,台阶部分110可以形成在紧固构件100的容器所联接到的一侧100a。然而,台阶部分110不必形成在紧固构件100的一侧。此外,紧固部分形成在紧固构件100的与一侧100a相反的另一侧100b处。紧固部分可以以各种方式提供。例如,参考图11,紧固部分可以是紧固槽120。另选地,如图26所示,紧固部分可以是紧固构件100的一侧端,头部232的第二部分234可以与该侧端接触。然而,在下文中,为了便于说明,将描述紧固部分是图11的紧固槽120。台阶部分110可以联接到可拆卸阻挡构件200中包括的阻挡主体210的第二支撑部分214的联接槽217,这将在后面说明。这里,第二支撑部分214的联接槽217可以形成为联接槽217的分离间隔从上侧到下侧逐渐减小的形状,例如形成近似“V”形(见图6),并且紧固构件100的台阶部分110可以具有对应于图9所示的第二支撑部分214的联接槽217的形状,以便联接到第二支撑部分214的联接槽217(见图4)。第二支撑部分214的联接槽217将在后面描述。如后面说明的,可拆卸阻挡构件200的止动构件230可以可拆卸地紧固到形成在紧固构件100的另一侧100b处的紧固槽120。如图2所示,在紧固构件100中,紧固构件100的一侧100a(见图9)固定地联接到容器10,使得台阶部分110面向容器10,并且紧固槽120在台阶部分110的相反侧暴露在容器10之外。此外,参考图3,可附接/可拆卸手柄20可拆卸地联接到紧固构件100。参考图4,可附接/可拆卸手柄20联接到紧固构件100。然而,在图4中,紧固构件100与容器10分离,以说明可附接/可拆卸手柄20和紧固构件100相联接的配置。事实上,如图2所示,紧固构件100固定地联接到容器10,并且参考图1,可附接/可拆卸手柄20联接到紧固构件100,紧固构件100固定地联接到容器10。
可拆卸阻挡构件200可以包括止动构件230,止动构件230可以可拆卸地紧固到紧固构件100的紧固槽120。这里,可拆卸阻挡构件200包括止动构件230,并且还可以包括阻挡主体210、弹性构件220和杆240。这将在下面详细描述。
如图6所示,阻挡主体210具有空间216和穿孔219,紧固构件100可插入该空间中,弹性构件220和止动构件230可以插入该穿孔219中。也就是说,固定地联接到容器10的紧固构件100插入到阻挡主体210的空间216中,并且如果如图5所示插入到穿孔219中的止动构件230接触紧固构件100以接收力,则紧固构件100基于图5向后移动。这里,如果紧固构件100的紧固槽120移动到止动构件230的头部232,则止动构件230通过弹性构件220的弹力朝向紧固构件100的紧固槽120移动,使得止动构件230的头部232可以紧固到紧固构件100的紧固槽120。
参考图6,阻挡主体210可以包括前阻挡部(front block)211和后阻挡部(rearblock)212。前阻挡部211可以具有供紧固构件100插入其中的空间216,使得紧固构件100可以插入前阻挡部211的空间216中。前阻挡部211可以包括第一支撑部分213、第二支撑部分214和连接部分215。后阻挡部212联接到第一支撑部分213,并且穿孔219可以从第一支撑部分213形成到后阻挡部212。第二支撑部分214可以形成为与第一支撑部分213间隔开。另外,由于第二支撑部分214与第一支撑部分213间隔开,所以紧固构件100可以插入的空间216可以形成在第二支撑部分214和第一支撑部分213之间。此外,形成在紧固构件100处的台阶部分110可以联接到的联接槽217可以形成在第二支撑部分214中。也就是说,如图3所示,如果用户握住可附接/可拆卸手柄20的手柄主体300,并将可附接/可拆卸手柄20从紧固构件100附接到的容器10的下侧移动到上侧,则紧固构件100插入可附接/可拆卸手柄20的可拆卸阻挡构件200的阻挡主体210中,例如插入阻挡主体210的第一支撑部分213和第二支撑部分214之间的空间216中,并且紧固构件100的台阶部分110联接到第二支撑部分214的联接槽217。这里,参考图6和图7,第二支撑部分214可以包括一对壁218a、218b,并且联接槽217可以形成在该对壁218a、218b之间。也就是说,该对壁218a、218b可以基于在穿过该对壁218a、218b的中心的竖直方向上的虚拟竖直线L而形成为彼此部分地间隔开,并且相应地,联接槽217可以形成在该对壁218a、218b之间。此时,该对壁218a、218b可以配置成关于穿过该对壁218a、218b的中心的虚拟竖直线L对称。例如,如图7所示,该对壁218a、218b可以配置成具有开放的上侧和连接的下侧,使得联接槽217形成在该对壁218a、218b之间。此外,参考图7,联接槽217可以形成为使得其分离间隔g从上侧到下侧逐渐减小,例如基本上呈“V”形。如果联接槽217形成为使得其分离间隔g如上所述从上侧到下侧逐渐减小,则在联接槽217联接到形成为对应于如图9所示的联接槽217的形状(见图4)的紧固构件100的台阶部分110之后,可以防止阻挡主体210和紧固构件100在基于图7的左右方向上移动。也就是说,假设联接槽217水平地形成而不改变间隔g,并且紧固构件100的台阶部分110水平地形成而不改变宽度w1(见图9),则必须人为地形成预定间隙以防止加工误差以及台阶部分110和联接槽217之间的碰撞或干涉,并且即使紧固构件100联接到可拆卸阻挡构件200,如上所述,由于台阶部分110和联接槽217之间的间隙,可附接/可拆卸手柄20可以从容器10向左和向右移动。然而,在包括根据本公开的第一实施例的可附接/可拆卸手柄20的容器10中,联接槽217形成为使得其分离间隔g从上侧到下侧逐渐减小,并且紧固构件100的形成有台阶部分110的中心部分形成为使得宽度w1(见图9)从上侧到下侧逐渐减小,从而消除或减少加工误差或间隙。因此,可以防止可附接/可拆卸手柄20基于图7向左和向右移动。也就是说,如图4所示,紧固构件100可以无间隙地精确插入到可拆卸阻挡构件200中。再次参考图6,连接部分215配置为连接第一支撑部分213和第二支撑部分214。参考图13,连接部分215可以形成为具有基于内部横截面从上侧到下侧逐渐减小的宽度w2。此外,参考图10,紧固构件100的接触连接部分215的内侧的侧表面可以形成为使得其宽度w3从上侧到下侧逐渐减小。也就是说,类似于上述联接槽217和台阶部分110,连接部分215的内侧的宽度w2和紧固构件100的侧表面的宽度w3形成为从上侧到下侧逐渐减小,因此可以防止可附接/可拆卸手柄20和紧固构件100在基于图6的前后方向上移动。因此,可以防止可附接/可拆卸手柄20在基于图6的前后方向上移动。此外,如果连接部分215的内侧的宽度w2改变,即如果连接部分215的内侧倾斜并且紧固构件100的侧表面也倾斜,则当阻挡主体210插入紧固构件100中时,形成在连接部分215的内侧的倾斜度沿着形成在紧固构件100的侧表面的倾斜度移动,因此阻挡主体210可以容易地插入紧固构件100中。也就是说,连接部分215的内侧和紧固构件100的侧表面的倾斜度可以用作引导。后阻挡部212联接到前阻挡部211,并具有穿孔219(见图13),使得弹性构件220和止动构件230可以插入穿孔219中(见图12)。后阻挡部212可以与前阻挡部211一体地形成,或者后阻挡部212可以在单独制造出后阻挡部212和前阻挡部211之后联接到前阻挡部211。
如图12所示,弹性构件220可以插入阻挡主体210的穿孔219中。弹性构件220可以采用具有弹性恢复力的各种构件,并且弹性构件220可以包括例如可以插入穿孔219中的螺旋弹簧。例如,如果用户拉拽杆240(稍后说明),以在预定方向上移动联接到杆240的止动构件230,然后释放杆240,则止动构件230可以通过弹性构件220的弹性恢复力在与预定方向相反的方向上移动。同时,作为另一个实施例,弹性构件220可以分别联接到阻挡主体210和杆240,而不插入穿孔219中。也就是说,弹性构件220的一侧端可以联接到阻挡主体210,并且弹性构件220的另一侧端可以联接到杆240。此外,止动构件230可插入穿孔219中并联接到杆240,以从联接到杆240的弹性构件220接收弹力,因此止动构件230可以紧固到形成在紧固构件100处的紧固槽120。
参考图12,如上所述,止动构件230可以插入穿孔219中并联接到弹性构件220,以便在通过接收弹力而移动的同时紧固到紧固构件100的紧固槽120。然而,止动构件230的移动方法不限于弹性构件220,并且可以采用各种方法。也就是说,只要止动构件230可以移动并紧固到紧固槽120,止动构件230就可以设置成通过各种方法移动。此外,止动构件230可以紧固到形成在紧固构件100处的紧固槽120。
参考图8和图12,止动构件230可以包括移动轴231和头部232。移动轴231可以在纵向方向上形成为可移动。移动轴231可以插入穿孔219中并联接到杆240。也就是说,如果用户拉拽杆240,则联接到杆240的移动轴231在阻挡主体210的穿孔219内在预设方向上移动。此外,头部232联接到移动轴231,并且与移动轴231一起移动。此外,如果用户释放杆240,则头部232和移动轴231通过弹性构件220的弹性恢复力移动,并且头部232朝向紧固构件100的紧固槽120移动并与紧固槽120接触,如图8所示。因此,可附接/可拆卸手柄20可以紧固到容器10的紧固构件100。另选地,当紧固构件100在用户不拉拽杆240的状态下插入阻挡主体210中时,如果紧固构件100接触头部232并基于图5向后推动头部232,则弹性构件220弹性地收缩,使得头部232和移动轴231向后移动。此外,如果头部232移动到紧固构件100的紧固槽120,则头部232和移动轴231通过弹性构件220的弹性恢复力向前移动,使得头部232接触紧固构件100的紧固槽120,如图8所示。也就是说,为了将头部232联接到紧固构件100,用户可以在拉拽杆240的同时将紧固构件100插入阻挡主体210中,或者可以在不拉拽杆240的情况下将紧固构件100插入阻挡主体210中。参考图13,阻挡主体210的穿孔219可以配置成具有基于与容器10的外周表面正交的虚拟水平线h1的倾斜度,并且移动轴231可以以该倾斜度沿着穿孔219插入。参考图13和图14(a),穿孔219基于与容器10的外周表面正交的虚拟水平线h2不倾斜,其中在从顶部提供的力F1中,将移动轴231移动到穿孔219的后部(即在箭头X1的方向上)的力的分力是F2。参考图13和图14(b),穿孔219基于与容器10的外周表面正交的虚拟水平线h1倾斜,其中在从顶部提供的力F4中,将移动轴231移动到穿孔219的后部(即在箭头X2的方向上)的力的分力是F5。比较图14(a)和图14(b)的实施例,在图14(b)的实施例中,与图14(a)的实施例相比,可以用较小的力将移动轴231沿着箭头X2容易地移动到穿孔219的后部。也就是说,如果图14(a)的F1和图14(b)的F4具有相同的大小,则看出用于将移动轴231向后移动的力Fb(即图14(b)的F5的大小)大于Fa(即图14(a)的F2的大小)。因此,在穿孔219倾斜的图14(b)的实施例中,与图14(a)的实施例相比,可以用较小的力将移动轴231沿着箭头X2容易地向后移动。
头部232可以与移动轴231一起移动,以接触紧固槽120。头部232可以包括第一部分233、第二部分234和第三部分235。第一部分233是联接到移动轴231的部分,并且设置在基于图8的后部,并且第一部分233可以联接到移动轴231,使得第一部分233和移动轴231彼此相交,例如彼此正交,如图8所示。这里,第一部分233可以被联接成相对于移动轴231具有各种角度。第二部分234是联接到第一部分233的部分,并且设置在基于图8的一侧,并且第二部分234可以接触紧固槽120的一侧,例如基于图8的紧固槽120的下侧。这里,第二部分234可以直接联接到第一部分233,或者可以经由另一构件间接地联接。第二部分234可以具有基于移动轴231的倾斜度。也就是说,第二部分234和移动轴231可以配置成具有第一角度θ1。这里,第二部分234可以相对于移动轴231向上或向下倾斜,并且例如,第二部分234可以相对于移动轴231比移动轴231更向下倾斜。参考图28至图30,在图28中,止动构件230与紧固构件100接触地沿着紧固构件100向上移动,并且参考图29,止动构件230的头部232在朝向紧固槽120移动的同时瞬间地与紧固构件100分离。此外,参考图30,当头部232通过弹性构件620的弹力向紧固构件100移动时,头部232的第二部分234与紧固槽120接触。这个原理是可能的,因为第二部分234相对于移动轴231倾斜成具有第一角度θ1(见图8)。也就是说,参考图13,阻挡主体210的穿孔219可以具有基于如上所述的虚拟水平线h1的倾斜度,并且参考图12,移动轴231可以以倾斜度沿着穿孔219插入。因此,如果施加了弹性构件220的弹力,则移动轴231沿着穿孔219的倾斜度朝向紧固槽120移动,如图12和图13所示。这里,如果图8的第二部分234和移动轴231平行,即如果图8的第一角度θ1为零,则即使移动轴231通过弹性构件220的弹力朝向紧固槽120移动,平行于移动轴231的第二部分234也不接触紧固槽120的下侧,并且头部232可以插入紧固槽120中,以在头部232和紧固槽120之间产生间隙。然而,由于第二部分234和移动轴231倾斜多达第一角度θ1,如果移动轴231朝向紧固槽120不断地移动,则移动轴231在第二部分234中的任意位置与紧固槽120接触(见图30)。此外,如图30所示,在头部232的第二部分234与紧固槽120的下侧接触的状态下,头部232继续沿着第二部分234的倾斜表面移动,使得头部232通过接触可拆卸阻挡构件200和紧固槽120中的至少一者而停止。也就是说,尽管图30中未示出,参考图12,由于头部232的第二部分234接触紧固槽120的下侧并且头部232的上部接触可拆卸阻挡构件200的阻挡主体210,也就是说,由于头部232分别在其上侧和下侧与可拆卸阻挡构件200的阻挡主体210和紧固槽120接触,所以完全不会出现间隙,因此,可附接/可拆卸手柄20可以被固定而不移动。在图12中,头部232与紧固构件100分离。也就是说,尽管头部232的第三部分235(见图8)与紧固构件100的紧固槽120分离,但是头部232可以与紧固构件100接触。也就是说,如图29和图30所示,当头部232的第二部分234继续沿着第二部分234的与紧固构件100的紧固槽120的下侧接触的倾斜表面向上移动时,如果头部232的上侧与可拆卸阻挡构件200的阻挡主体210接触(见图12),或者如果头部232的第三部分235(见图8)与紧固构件100的紧固槽120的上侧接触(尽管图中未示出),或者如果头部232与可拆卸阻挡构件200的阻挡主体210和紧固构件100的紧固槽120的上侧二者接触,则头部232停止移动。也就是说,由于头部232与紧固槽120的下侧和阻挡主体210接触并且紧紧地夹持在紧固槽120的下侧和阻挡主体210之间,所以没有间隙,从而防止头部232移动。同时,也可能的是,仅头部232的第二部分234与紧固槽120的下侧接触并且头部232与可拆卸阻挡构件200的阻挡主体210和紧固构件100的紧固槽120的上侧间隔开。在这种情况下,头部可能由于头部232的第二部分234和紧固槽120的下侧之间的接触所引起的摩擦力而停止移动,因此可能发生轻微的向上移动。然而,由于联接到移动轴231的杆240可以阻止移动轴231和头部232的移动,所以可以实现本公开的目的。此外,第三部分235是联接到第二部分234的部分,并且第三部分235也可以直接地联接到第二部分233或者经由另一构件间接地联接到第二部分233。第三部分235设置在基于图8的前面,并且可以与紧固槽120的另一侧间隔开,例如基于图8的紧固槽120的上侧,或者也可以与基于图8的紧固槽120的上侧接触。也就是说,第三部分235不必与紧固槽120接触,而是可以与紧固槽120分离。像第二部分234一样,第三部分235可以具有相对于移动轴231的倾斜度。也就是说,第三部分235和移动轴231可以配置成具有第二角度θ2。如果第三部分235形成为具有倾斜度,则紧固构件100可以沿着第三部分235的倾斜表面容易地移动,使得可以用较小的力使止动构件230移动。另外,第三部分235可以以移动轴231为基准向上或向下倾斜,并且例如,第三部分235可以形成为以移动轴231为基准比移动轴231更向上倾斜。这里,基于移动轴231的第二部分234的倾斜度和第三部分235的倾斜度可以形成为使得以锐角为基准,形成在第二部分234和移动轴231之间的第一角度θ1小于形成在第三部分235和移动轴231之间形成的第二角度θ2。如果如上所述相对于移动轴231在第二部分234和第三部分235中都形成倾斜度,则在止动构件230的头部232接触紧固槽120之后,可以防止头部232在基于图8的前后方向上移动。也就是说,像上述的联接槽217和台阶部分110一样,如果在头部232中没有形成倾斜度,则必须人工地形成预定的间隙,以防止加工误差以及头部232和紧固槽120之间的碰撞或干涉。在这种情况下,即使头部232被紧固成与紧固槽120接触,可附接/可拆卸手柄20也可以从容器10上下移动。然而,在包括根据本公开的第一实施例的可附接/可拆卸手柄20的容器10中,由于头部232的第二部分234和第三部分235相对于移动轴231倾斜,所以可以消除或减少加工误差或间隙,从而防止可附接/可拆卸手柄20在基于图8的上下方向上移动。也就是说,头部232可以无间隙地精确接触并紧固到紧固槽120。然而,头部232的第二部分234和第三部分235二者都不一定倾斜,并且第二部分234和第三部分235中的至少一者可以根据需要倾斜。同时,如果用户翻转可附接/可拆卸手柄20,即如果紧固构件100的上部和下部基于图8颠倒,则止动构件230的上部和下部也颠倒。这里,如果在重力方向上施加力,则止动构件230的移动轴231接收朝向紧固构件100的力,因此可附接/可拆卸手柄20更牢固地固定到紧固构件100。
参考图5和图12,杆240联接到止动构件230,用户可以通过握持并操作杆240从紧固槽120中释放止动构件230。例如,当用户在图12中箭头的方向上拉拽杆240时,联接到杆240的止动构件230沿杆240的移动方向移动,并且因此止动构件230的头部232可以与紧固构件100的紧固槽120分离。
参考图5,可拆卸阻挡构件200联接到手柄主体300,并且手柄主体300可以形成为用户容易抓握的形状。手柄主体300可以由各种材料制成,例如金属或塑料。然而,手柄主体300的材料不限于此,而是可以使用更多样的材料。
在下文中,将参考附图来描述根据本公开的第一实施例的包括可附接/可拆卸手柄20的容器10的操作和效果。
参考图2,紧固构件100联接到容器10。这里,参考图3,如果基于图3将可附接/可拆卸手柄20从紧固构件100的下侧提升到上侧,则紧固构件100插入形成在可拆卸阻挡构件200的阻挡主体210中的空间216中。此时,如果紧固构件100插入到阻挡主体210的空间216中,则止动构件230的插入到阻挡主体210的穿孔219中的头部232与紧固构件100接触,如图5所示,并且紧固构件100插入到空间216中,以向止动构件230的头部232施加力,同时相对于可拆卸阻挡构件200相对向下地移动。通过所提供的力,头部232接收基于图5向后的力。也就是说,基于紧固构件100相对于阻挡主体210的相对移动,紧固构件100从阻挡主体210的上侧到下侧插入阻挡主体210的空间216中,以接触头部232,从而向后推动头部232。由于如图12所示,头部232连接到移动轴231,并且弹性构件220连接到止动构件230,所以如果头部232通过紧固构件100接收力,则在头部232和移动轴231插入穿孔219的状态下,弹性构件220弹性地收缩以基于图5向后移动。此外,如果紧固构件100继续向下移动并且头部232放置在紧固槽120的位置,则头部232通过连接到头部232的弹性构件220的弹性恢复力基于图5向前移动,从而接触并紧固到紧固构件100的紧固槽120,如图8和图12所示。因此,可附接/可拆卸手柄20紧固到容器10的紧固构件100。这里,参考图12和图13,穿孔219是倾斜的,并且插入穿孔219中的移动轴231也设置成倾斜的,由此用户基于图5(即沿着图14(b)的箭头X2方向)仅用很小的力就可以容易地向后移动止动构件230。
同时,如果可附接/可拆卸手柄20紧固到容器10的紧固构件100,则形成在阻挡主体210的第二支撑部分214处的联接槽217可以形成为使得其间隔g(见图7)从上侧朝向下侧逐渐减小,例如呈近似“V”形。此外,形成台阶部分110的紧固构件100的中心部分可以形成为使得其宽度w1(见图9)从上侧到下侧逐渐减小,从而消除或减少加工误差或间隙。因此,可以防止可附接/可拆卸手柄20基于图7在左右方向上移动。另外,连接部分215可以形成为使得其宽度w2(见图13)基于内侧的横截面从上侧到下侧逐渐减小,并且参考图10,紧固构件100的与连接部分215的内侧接触的侧表面可以形成为使得其宽度w3从上侧到下侧逐渐减小,从而防止可附接/可拆卸手柄20在基于图6的前后方向上移动。此外,参考图8,止动构件230的头部232的第二部分234可以相对于移动轴231倾斜,并且类似于第二部分234,止动构件230的头部232的第三部分235也可以相对于移动轴231倾斜。由于第二部分234和第三部分235基于移动轴231倾斜,所以可以防止可附接/可拆卸手柄20在基于图8的上下方向上移动。
如上所述,根据本公开的第一实施例的包括可附接/可拆卸手柄20的容器10可以防止容器10和可附接/可拆卸手柄20在所有方向上移动,即在前、后、左、右、上和下方向上移动,从而确保用户稳定且方便地烹饪。
此外,用户可以仅通过抓住可附接/可拆卸手柄20的手柄主体300并且然后从联接到容器10的紧固构件100的下侧向上提起可附接/可拆卸手柄20来将可附接/可拆卸手柄20联接到容器10。此外,用户可以仅通过拉拽杆240以向下移动可附接/可拆卸手柄20来将可附接/可拆卸手柄20从容器10上拆卸。因此,可以确保每次方便的附接和拆卸。
此外,由于可以储存与手柄20分离的多个容器10,所以手柄20和容器10不会干涉或碰撞,从而确保容易储存并减小储存的容器10的体积。
同时,作为根据本公开的第一实施例的具有可附接/可拆卸手柄的容器的修改实施例,可以考虑紧固构件100联接到手柄主体300并且阻挡主体210联接到容器10的情况。
图15是截面图,其示出了在根据本公开的第二实施例的具有可附接/可拆卸手柄的容器中,紧固构件插入到可拆卸阻挡构件中。
在下文中,将参考附图来描述根据本公开的第二实施例的包括可附接/可拆卸手柄20的容器10的操作和效果。然而,将不详细地描述与根据本公开的第一实施例的包括可附接/可拆卸手柄20的容器10的特征相同的特征,并且将详细地描述不同的特征。
本公开的第二实施例与第一实施例的不同之处在于在阻挡主体210的一部分和止动构件230的一部分中包括磁体410、420,代替可拆卸阻挡构件200中的弹性构件220。
可拆卸阻挡构件200包括阻挡主体210、止动构件230和杆240。如在第一实施例中,阻挡主体210具有可以供紧固构件100插入其中的空间216和穿孔219,并且它们已经在第一实施例中进行了描述。另外,参考图15,阻挡主体210的一部分形成为磁体410。如在第一实施例中,将止动构件230插入到穿孔219中,并且将止动构件230紧固到形成在紧固构件100中的紧固槽120,并且这已经在第一实施例中进行了描述。此外,参考图15,止动构件230的一部分(例如,移动轴231的一部分)形成为具有与阻挡主体210的磁体410相同极性的磁体420。同时,像第一实施例一样,杆240联接到止动构件230,并且这已经在第一实施例中进行了描述。
图15示出了一种状态,其中止动构件230朝向紧固构件100移动,使得头部232紧固到紧固槽120,并且因此可附接/可拆卸手柄20联接到容器10。这里,如果用户拉拽杆240以将可附接/可拆卸手柄20从容器10分离,则阻挡主体210的磁体410和止动构件230的移动轴231的磁体420彼此靠近放置。此外,如果用户在可附接/可拆卸手柄20与容器10分离之后释放杆240,则具有相同极性的阻挡主体210的磁体410和止动构件230的移动轴231的磁体420彼此推动。也就是说,即使止动构件230不具有第一实施例的弹性构件220,止动构件230也可以通过具有相同极性的磁体410、420的排斥力恢复到其原始位置。
图16是截面图,其示出了在根据本公开的第三实施例的具有可附接/可拆卸手柄的容器中,紧固构件插入到可拆卸阻挡构件中。
在下文中,将参考附图来描述根据本公开的第三实施例的包括可附接/可拆卸手柄20的容器10的操作和效果。然而,将不详细地描述与根据本公开的第一实施例或第二实施例的包括可附接/可拆卸手柄20的容器10的特征相同的特征,并且将详细地描述不同的特征。
本公开的第三实施例与第一实施例和第二实施例的不同之处在于在杆240的至少一部分和手柄主体300的一部分而不是可拆卸阻挡构件200中的弹性构件220中包括磁体430、440。
可拆卸阻挡构件200包括阻挡主体210、止动构件230和杆240。阻挡主体210和止动构件230与第一实施例中的阻挡主体210和止动构件230相同,因此不再描述它们。如在第一实施例中一样,杆240联接到止动构件230,并且参考图16,杆240的至少一部分形成为磁体430。此外,手柄主体300的一部分(例如,手柄主体300的内侧的一部分)形成为具有与杆240的磁体430相同极性的磁体440。另外,类似于第二实施例,如果用户拉拽杆240以将可附接/可拆卸手柄20从容器10分离,则将杆240的磁体430和手柄主体300的磁体440放置在关闭位置。这里,如果用户在可附接/可拆卸手柄20与容器10分离之后释放杆240,则杆240的磁体430和手柄主体300的具有相同极性的磁体440彼此推动。也就是说,即使止动构件230不具有第一实施例的弹性构件220,止动构件230也可以通过具有相同极性的磁体430、440的排斥力恢复到其原始位置。
图17是透视图,其示出了根据本公开的第四实施例的具有可附接/可拆卸手柄的整个容器,其中紧固构件联接到手柄,图18是图17的侧截面图,图19是透视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的手柄主体,图20是透视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的可拆卸阻挡构件的阻挡主体,图21是透视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的紧固构件的一侧,图22是侧视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的紧固构件,图23是透视图,其示出了在根据本公开的第四实施例的具有可附接/可拆卸手柄的容器中的紧固构件的另一侧。
在下文中,将参考附图来描述根据本公开的第四实施例的包括可附接/可拆卸手柄20的容器10(见图1和图2)的操作和效果。然而,将不详细地描述与根据本公开的第一实施例至第三实施例的包括可附接/可拆卸手柄20的容器10的特征相同的特征,并且将详细地描述不同的特征。
在本公开的第四实施例中,不同于空间216和联接槽217形成在可拆卸阻挡构件200中的第一实施例至第三实施例,联接槽520和空间530形成在紧固构件500中(见图23)。此外,与第一实施例至第三实施例不同,阻挡主体610具有不同的形状,而且联接槽520的间隙从上侧到下侧逐渐增大。
参考图21,紧固构件500具有形成在紧固构件500的固定地联接到容器的一侧500a的紧固槽510。此外,参考图23,联接槽520形成在与一侧500a相反的另一侧500b处。这里,在紧固构件500的一侧500a和紧固构件500的另一侧500b之间形成有预定空间530。阻挡主体610的突起611插入到紧固构件500的空间530中,并且此时,阻挡主体610联接到紧固构件500的联接槽520。这里,紧固构件500的联接槽520可以成形为使得其分离间隔基于图23从上侧到下侧逐渐增大(见图23),并且阻挡主体610的突起611可以成形为使得其宽度w4从上侧到下侧逐渐增大,以对应于联接槽520(见图20)。可拆卸阻挡构件600的止动构件630可以可拆卸地紧固到形成在紧固构件500的一侧500a的紧固槽510(见图18),并且这已经在第一实施例至第三实施例中进行了描述。在紧固构件500中,紧固构件500的一侧500a(见图21和图22)固定地联接到容器10(见图1和图17),并且联接槽520在紧固槽510的相反侧暴露于容器10之外(见图22和图23)。此外,可附接/可拆卸手柄20可拆卸地联接到紧固构件500。
可拆卸阻挡构件600可以可拆卸地紧固到紧固构件500的紧固槽510。参考图18,可拆卸阻挡构件600可以包括阻挡主体610、弹性构件620、止动构件630和杆640。在下文中,将详细地描述可拆卸阻挡构件600。
参考图20,阻挡主体610包括插入到紧固构件500的空间530中的突起611,具有弹性构件620和止动构件630可以插入到其中的穿孔612,并且联接到紧固构件500的联接槽520。穿孔612已经在上面关于第一实施例至第三实施例中的穿孔219进行了描述。如果用户在握住可附接/可拆卸手柄20的手柄主体700的同时将可附接/可拆卸手柄20从紧固构件500所附接的容器的下侧移动到上侧,则阻挡主体610的突起611插入紧固构件500的空间530中,并且阻挡主体610联接到紧固构件500的联接槽520(见图17和图18)。这里,在第一实施例至第三实施例中已经描述了将止动构件630紧固到紧固槽510的过程。
同时,弹性构件620、止动构件630和杆640已经在上文中关于第一实施例至第三实施例的弹性构件220、止动构件230和杆240进行了描述。此外,可拆卸阻挡构件600联接到的手柄主体700(见图19)也已经在上文中关于第一实施例至第三实施例中的手柄进行了描述。
图24是侧截面图,其示出了在根据本公开的第五实施例的具有可附接/可拆卸手柄的容器中,紧固构件附接到手柄,图25是透视图,其示出了在根据本公开的第五实施例的具有可附接/可拆卸手柄的容器中的可拆卸阻挡构件的阻挡主体。
在下文中,将参考附图来描述根据本公开的第五实施例的包括可附接/可拆卸手柄20的容器10的操作和效果。然而,将不详细地描述与根据本公开的第一实施例至第四实施例的包括可附接/可拆卸手柄20的容器10的特征相同的特征,并且将详细地描述不同的特征。
本公开的第五实施例基本上与第四实施例相同,但是不同之处在于可拆卸阻挡构件600的阻挡主体610的形状不同于第四实施的可拆卸阻挡构件600的阻挡主体610的形状。
参考图24和图25,第五实施例的阻挡主体610中还设置有引导部分613。这里,引导部分613将阻挡主体610的前表面与紧固构件500分离开预定间隔。也就是说,参考示出第四实施例的图18,阻挡主体610的前表面与紧固构件500接触,但是参考示出第五实施例的图24,阻挡主体610的前表面通过引导部分613与紧固构件500间隔开。因此,第五实施例不同于第四实施例。
图27是侧视图,其示出了在根据本公开的第六实施例的具有可附接/可拆卸手柄的容器中,止动构件联接到紧固构件的紧固槽,并且图28至图30是示意图,其用于图示一个过程,在该过程中在根据本公开的第六实施例的具有可附接/可拆卸手柄的容器中,止动构件联接到紧固构件的紧固槽。
在下文中,将参考附图来描述根据本公开的第六实施例的包括可附接/可拆卸手柄20的容器10(见图1和图2)的操作和效果。然而,将不详细地描述与本公开的前述实施例的特征相同的特征,并且将详细地描述不同的特征。
在本公开的第六实施例中,第二部分234和第三部分235基于虚拟水平线Y1倾斜(见图27),这不同于其中第二部分234和第三部分235基于移动轴231倾斜的第一实施例。
参考图27,将止动构件230紧固到紧固部分,即将止动构件230紧固到紧固槽120,以相对于虚拟水平线Y1倾斜,为此,止动构件230可以包括移动轴231和头部232。移动轴231在纵向方向上形成,并且这里,移动轴231可以插入在阻挡主体210中形成的穿孔219中,以联接到杆240。该特征已经在上面在第一实施例中进行了描述。同时,如图12所示,弹性构件220可以插入阻挡主体210的穿孔219中。另选地,在另一个实施例中,弹性构件200的一侧可以联接到杆240,并且弹性构件200的另一侧可以联接到阻挡主体210。
参考图13,阻挡主体210的穿孔219可以配置成基于与容器10的外周表面正交的虚拟水平线h1倾斜,并且移动轴231可以沿着倾斜的穿孔219插入。也就是说,移动轴231可以基于图27的虚拟水平线Y1倾斜θ5,并插入阻挡主体210的穿孔219中。该特征与上述第一实施例相同,因此不再描述。
参考图27,头部232可以包括第一部分233、第二部分234和第三部分235。第一部分233联接到移动轴231,并设置在基于图27的后部。此外,如图27所示,第一部分233可以联接到移动轴231,使得第一部分233和移动轴231彼此相交。第一部分233可以联接到移动轴231,使得第一部分233和移动轴231之间可以具有不同的角度,例如使得第一部分233正交于移动轴231。第二部分234是从第一部分233延伸的部分,并且设置在基于图27的侧面,并且可以接触紧固槽120的一侧,例如基于图27的紧固槽120的下侧。如图27所示,第二部分234可以相对于虚拟水平线Y1倾斜。此外,第三部分235是从第二部分234延伸的部分,并且可以设置在基于图27的前面。这里,第三部分235可以接触紧固槽120的另一侧,例如基于图27的紧固槽120的上侧,或者可以与紧固槽120的上侧分离。也就是说,由于可附接/可拆卸手柄20可以在第二部分234与紧固槽120接触时被固定,所以第三部分235可以接触紧固槽120或者可以与紧固槽120分离而不接触紧固槽120。另外,第三部分235也可以像第二部分234一样相对于虚拟水平线Y1倾斜。这里,参考图27,相对于虚拟水平线Y1的第二部分234的倾斜度和第三部分235的倾斜度可以形成为使得以锐角为基准,在第二部分234和虚拟水平线Y1之间形成的第一角度θ3可以小于在第三部分235和虚拟水平线Y1之间形成的第二角度θ4。如果第二部分234和第三部分235基于如上所述的虚拟水平线Y1倾斜,则在止动构件230的头部232的第二部分234与紧固槽120接触之后,可以防止在基于图27的上下方向上的移动。也就是说,根据本公开的第一实施例的包括可附接/可拆卸手柄20的容器10可以消除或减少加工误差或间隙,因为头部232的第二部分234和第三部分235相对于虚拟水平线Y1倾斜,从而防止可附接/可拆卸手柄20在基于图27的上下方向上移动。也就是说,头部232可以无间隙地精确接触并紧固到紧固槽120。
参考图27,第一角度θ3可以相对于虚拟水平线Y1向下形成,并且第二角度θ4可以相对于虚拟水平线Y1向上形成。
同时,第二部分234可以形成为相对于移动轴231比移动轴231更向下倾斜。例如,如图27所示,第二部分234可以相对于与移动轴231平行的虚拟虚线Y2向下倾斜θ6。然而,第二部分234可以形成为相对于移动轴231比移动轴231更向上倾斜。
参考图28,头部232的第二部分234在与紧固构件100接触的同时向上移动。参考图29,如果头部232的第二部分234向上移动,则头部232暂时地与紧固构件100分离。此外,参考图30,当头部232通过弹性构件620的弹力朝向紧固构件100移动时,头部232的第二部分234与紧固槽120的下侧接触。此外,当头部232的第二部分234与紧固槽120的下侧接触时,头部232继续沿着第二部分234的倾斜表面移动,并且头部232通过与可拆卸阻挡构件200和紧固槽120中的至少一者接触而停止。因此,可附接/可拆卸手柄20可以固定而不移动。
同时,在本公开的第六实施例中描述的特征可以根据需要应用于本公开的第一实施例至第五实施例至可应用程度。
图31和图32是示意图,其示出了在根据本公开的第七实施例的具有可附接/可拆卸手柄的容器中,止动构件的头部沿着紧固构件的倾斜部分移动。
在下文中,将参考附图来描述根据本公开的第七实施例的包括可附接/可拆卸手柄20的容器10(见图1和图2)的操作和效果。然而,将不详细地描述与本公开的前述实施例的特征相同的特征,将详细地描述不同的特征。
在本公开的第七实施例中,与第一实施例至第六实施例不同,倾斜部分130形成在紧固构件100处,并且止动构件230的头部232沿着紧固构件100的倾斜部分130移动。
参考图31,倾斜部分130形成在紧固构件100处。此外,头部232可以沿着倾斜部分130移动,同时与紧固构件100的倾斜部分130接触。这里,第二部分234可以平行于移动轴231形成。也就是说,第二部分234相对于移动轴231不倾斜。然而,这并不意味着排除第二部分234相对于移动轴231倾斜的情况。也就是说,即使在第七实施例中,第二部分234也可以相对于移动轴231倾斜。这里,头部232可以在头部232的第二部分234和第三部分235相遇的连接点237处与倾斜部分130接触(见图32)。另外,如果移动轴231通过弹性构件620的弹力移动,则连接点237沿着紧固构件100的倾斜部分130移动,同时与紧固构件100的倾斜部分130接触。此外,头部232停止与可拆卸阻挡构件200的阻挡主体210和紧固槽120的上侧中的至少一者接触。头部232停止的过程与前面的实施例相同,因此不再描述。
图33和图34是示意图,其示出了在根据本公开的第八实施例的具有可附接/可拆卸手柄的容器中,止动构件的头部联接到紧固构件。
在下文中,将参考附图来描述根据本公开的第八实施例的包括可附接/可拆卸手柄20的容器10(见图1和图2)的操作和效果。然而,将不详细地描述与本公开的前述实施例的特征相同的特征,将详细地描述不同的特征。
在本公开的第八实施例中,与其它实施例不同,头部232首先与可拆卸阻挡构件200而不是与紧固构件100接触,并且移动。
参考图33和图34,头部232包括联接到第一部分233的第四部分236。第四部分236可以是直接地联接到第一部分233的部分,或者可以是通过另一部分或其它构件间接地联接到第一部分233的部分。参考图33,头部232的第四部分236在首先接触可拆卸阻挡构件200的阻挡主体210的状态下移动,并且参考图34,头部232的第二部分234可以设置成通过接触紧固槽120的下侧而停止。这里,头部232的第四部分236可以在不同的位置处与可拆卸阻挡构件200的阻挡主体210接触,并且例如,如图33所示,可以设置成在第四部分236和第三部分235相遇的点处与可拆卸阻挡构件200的阻挡主体210接触。
图35和图36是示意图,其示出了在根据本公开的第九实施例的具有可附接/可拆卸手柄的容器中,止动构件的头部联接到紧固构件。
在下文中,将参考附图来描述根据本公开的第九实施例的包括可附接/可拆卸手柄20的容器10(见图1和图2)的操作和效果。然而,将不详细地描述与本公开的前述实施例的特征相同的特征,将详细地描述不同的特征。
在本公开的第九实施例中,与第一实施例至第七实施例不同,头部232首先与可拆卸阻挡构件200而不是与紧固构件100接触,并移动,并且与第八实施例不同,在紧固构件100处形成倾斜部分130。
参考图35和图36,头部232包括联接到第一部分233的第四部分236。第四部分236可以是直接地联接到第一部分233的部分,或者可以是通过另一部分或其它构件间接地联接到第一部分233的部分。此外,在紧固构件100处形成倾斜部分130。参考图35,头部232的第四部分236在首先接触可拆卸阻挡构件200的阻挡主体210的同时移动,并且参考图36,可以设置为通过在头部232的第二部分234和第三部分235相遇的连接点237处接触头部232的另一部分(例如,紧固构件100的倾斜部分130)而停止。
已经详细地描述了本公开。然而,应当理解,由于根据该详细说明,对于本领域技术人员来说,本公开的范围内的各种变化和修改将是显而易见的,所以详细说明和具体实例虽然指示了本公开的优选实施例,但仅以图示的方式给出。
工业实用性
本公开涉及一种具有可附接/可拆卸手柄的容器,并且特别适用于与具有可附接/可拆卸手柄的容器相关的行业。
- 具有可附接/可拆卸手柄的容器
- 用于附接和释放烹调食物用的容器的手柄的系统