一种四支抓旋转式抓取机械手
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及机械手制造加工技术领域,更具体的说涉及一种四支抓旋转式抓取机械手。
背景技术
现有的机械手一般只具有单个抓取装置,如夹持一些五金零部件,如带柄三通球体,其在夹持后,需要移动输送到其他后续的加工位处,其效率低,效果差。
发明内容
本发明的目的就是针对现有技术之不足,而提供一种四支抓旋转式抓取机械手,它可以自动连续抓取四个五金零件,大大提高输送抓取效果和后续的加工效率。
本发明的技术解决措施如下:
一种四支抓旋转式抓取机械手,包括连接座,所述连接座的底板上固定有固定座,固定座的底板上安装有旋转伺服电机,旋转伺服电机的输出轴穿过固定座的底板的底面并固定有旋转板,旋转板的边部底面上固定有横向伸缩机构;
所述横向伸缩机构的推动板上固定有竖直固定板,竖直固定板的外侧壁上固定有气动手指,气动手指的两个推动块的相对壁面上均固定有夹持块;
两个夹持块的相对壁面上均成型有弧形夹持槽。
所述旋转板的顶面的前部、后部、左部和右部上均固定有感应块,固定座的底板上固定有接近开关,接近开关的感应端与感应块相对应。
所述横向伸缩机构包括固定在旋转板的底面的左部、右部、前部或后部的固定连接板,固定连接板的内壁面上固定有伸缩气缸,伸缩气缸的推杆穿过固定连接板并固定有推动板。
所述竖直固定板上固定有横向导向杆,横向导向杆插套在固定连接板上具有的横向导向通孔中。
所述横向导向通孔的内侧壁上固定有横向导向套,横向导向杆插套在横向导向套中。
所述旋转板的顶面上固定有环形导向套筒,固定座的左右两个侧板的外侧壁上固定有导向块,环形导向套筒的内侧壁上固定有环形导向部,环形导向部的内侧壁上成型有内环形槽,导向块的外侧部插套在内环形槽中。
所述内环形槽为弧形壁面,导向块的外侧壁为弧形壁面,导向块的外侧壁紧贴内环形槽的内侧壁。
本发明的有益效果在于:
它可以自动连续抓取四个五金零件,大大提高输送抓取效果和后续的加工效率。
附图说明
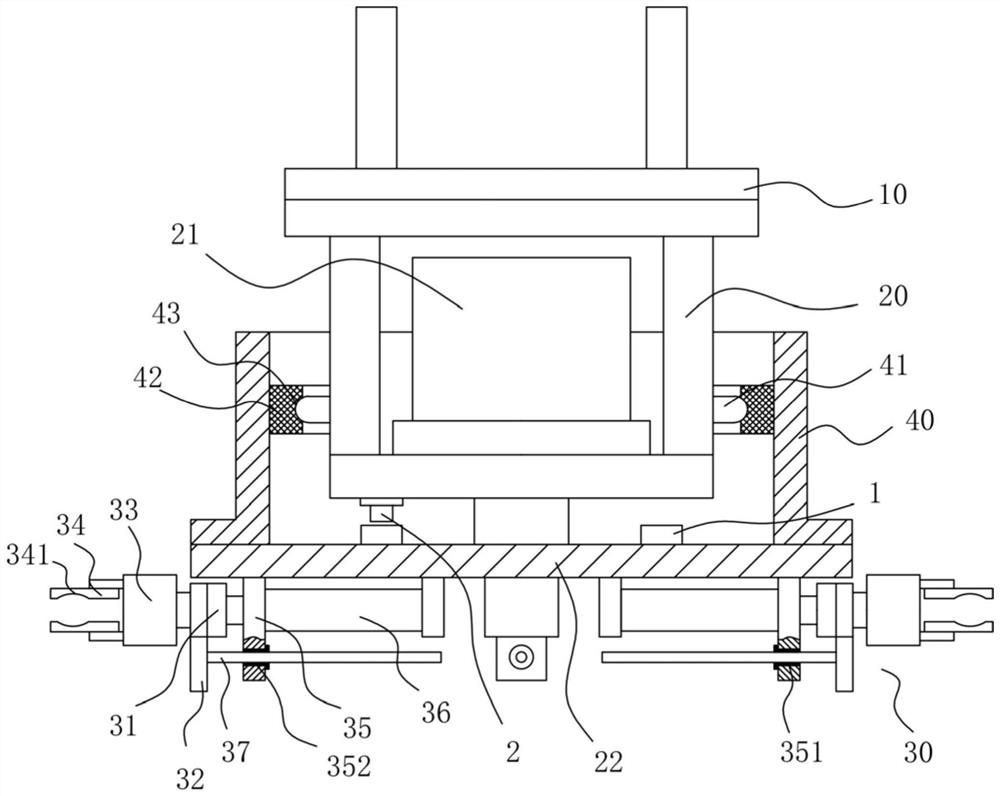
图1为本发明的局部剖视图;
图2为固定座的底板的底面的局部结构示意图。
具体实施方式
实施例:见图1至图2所示,一种四支抓旋转式抓取机械手,包括连接座10,所述连接座10的底板上固定有固定座20,固定座20的底板上安装有旋转伺服电机21,旋转伺服电机21的输出轴穿过固定座20的底板的底面并固定有旋转板22,旋转板22的边部底面上固定有横向伸缩机构30;
所述横向伸缩机构30的推动板31上固定有竖直固定板32,竖直固定板32的外侧壁上固定有气动手指33,气动手指33的两个推动块的相对壁面上均固定有夹持块34;
两个夹持块34的相对壁面上均成型有弧形夹持槽341。
进一步的说,所述旋转板22的顶面的前部、后部、左部和右部上均固定有感应块1,固定座20的底板上固定有接近开关2,接近开关2的感应端与感应块1相对应。
进一步的说,所述横向伸缩机构30包括固定在旋转板22的底面的左部、右部、前部或后部的固定连接板35,固定连接板35的内壁面上固定有伸缩气缸36,伸缩气缸36的推杆穿过固定连接板35并固定有推动板31。
进一步的说,所述竖直固定板32上固定有横向导向杆37,横向导向杆37插套在固定连接板35上具有的横向导向通孔351中。
进一步的说,所述横向导向通孔351的内侧壁上固定有横向导向套352,横向导向杆37插套在横向导向套352中。
进一步的说,所述旋转板22的顶面上固定有环形导向套筒40,固定座20的左右两个侧板的外侧壁上固定有导向块41,环形导向套筒40的内侧壁上固定有环形导向部42,环形导向部42的内侧壁上成型有内环形槽43,导向块41的外侧部插套在内环形槽43中。
进一步的说,所述内环形槽43为弧形壁面,导向块41的外侧壁为弧形壁面,导向块41的外侧壁紧贴内环形槽43的内侧壁。
本实施例中,在使用时,将连接座10固定在移动机构上,其使用时,可以通过旋转伺服电机21运行,实现旋转板22的旋转,在旋转时,通过接近开关2的感应端感应到对应的感应块1,此时,说明对应的夹持块34对着需要夹持的物料,然后,通过伸缩气缸36的推杆推动,使得推动板31推动,使得气动手指33的两个推动块处于待夹持的物料的两侧,然后,通过气动手指33的两个推动块相靠近,将物料夹持,然后,伸缩气缸36的推杆回缩,然后,再通过旋转伺服电机21运行,实现旋转板22的旋转,使得另一个气动手指33对着后续的物料,进行夹持抓取,等四个物料抓取后,即可通过移动机构,将其移动至后续加工处进行放料,非常方便,效果好。
- 一种四支抓旋转式抓取机械手
- 一种可多方位转动且便于调节抓力的纸脚抓取机械手装置