一种基于神经网络的尾退分离场景气动建模方法
文献发布时间:2024-01-17 01:17:49
技术领域
本发明涉及一种基于神经网络的尾退分离场景气动建模方法,属于飞行器气动设计技术领域。
背景技术
目前工程上广泛应用的非线性非定常气动力建模方法主要有两类研究方法:一类是建立气动力和飞行物理量相关的传统数学类的气动模型(如代数模型、阶跃响应模型等),另一类是智能学习类的气动模型(如模糊逻辑法、支持向量机(SVM)等)。其中传统数学类方法是进行大量的气动数据来进行分段线性气动建模,模型精度较低,参数辨识难度大,已逐渐无法满足现有工程需求。智能学习类方法可以建立较高精度的多输入多输出非线性气动模型,非常适合非线性气动力建模。
在尾退分离场景的分离轨迹预测过程中,由于母弹与子弹存在较为严重的气动干扰,使得二者在分离过程中气动力呈现非常明显的非线性气动特性。如果采用传统的数值计算手段(CFD)对不同工况下的分离过程进行计算,将带来极大的计算资源与时间开销(每个状态要计算若干小时),为尾退分离场景的分离轨迹设计与评估带来较大困难。因此需要利用智能学习类方法建模精度高的优势,建立尾退分离场景的气动模型,通过此模型能够快速预测(计算时间为一秒量级)母弹与子弹气动力,从而为尾退分离场景中的分离轨迹与安全边界设计提供一种快速的气动力预测手段。
发明内容
本发明的技术解决问题是:克服现有技术的不足,提供一种基于神经网络的尾退分离场景气动建模方法,建立尾退分离场景的气动模型,为尾退分离场景中的分离轨迹设计与安全边界设计提供一种快速的气动力预测手段。
本发明的技术解决方案是:
本发明公开了一种基于神经网络的尾退分离场景气动建模方法,包含以下步骤:
S1、建立气动力数据集;
S2、将所述气动力数据集中一部分数据作为样本集,将剩余部分的数据作为验证数据,形成验证集;
S3、建立初步机器学习模型;
S4、对所述初步机器学习模型进行优化,建立初步尾退分离场景气动模型;
S5、对所述初步尾退分离场景气动模型进行验证,如果模型精度达到要求,则得到最终的尾退分离场景气动模型,否则重复步骤S3~S4。
进一步地,在上述建模方法中,所述步骤S1中,建立气动力数据集,具体为:
S11、根据尾退分离飞行器的特点生成CFD数值模拟所需气动计算网格;
S12、根据尾退分离飞行器的特点选取气动设置项进行初步气动计算,获得气动力与流场;
S13、根据所述气动力与流场,进行网格加密,直至气动力几乎不变;
S14、模拟尾退分离飞行器在相对姿态下的流场,获取气动力数据;
S15、将所述气动力数据按照相对姿态进行排序,形成气动力数据集。
进一步地,在上述建模方法中,所述步骤S11中,根据尾退分离飞行器的特点生成CFD数值模拟所需气动计算网格,具体为:
S31:采用网格生成软件生成网格,导入尾退分离飞行器数模,包含母弹和子弹;
S32:在飞行器数模边缘生成网格线connector;
S33:在每个网格线connector上分布网格点,在具有较多分离流动的区域进行加密;
S34:通过网格线connector生成网格面domain,并将网格面domain投影至数模表面,使网格贴体;
S35:通过网格面domain生成网格块block,完成空间网格生成;
S36:保持母弹不动,子弹根据相对姿态调整位置,重复步骤S31至步骤S35,最终形成在不同相对姿态下的飞行器网格。
进一步地,在上述建模方法中,所述步骤S36中相对姿态,采用四维变量进行描述;所述四维变量,包括x方向相对距离,x方向相对距离,y方向相对距离、来流攻角α、相对姿态角az。
进一步地,在上述建模方法中,所述步骤S3中,建立初步机器学习模型,具体步骤如下:
S51:建立神经网络框架;
S52:基于神经网络框架,设置神经网络层数;
S53:设置神经网络每一层的神经元数;
S54:将x方向相对距离,y方向相对距离、来流攻角α、相对姿态角进行归一化;
S55:选取神经网络损失函数优化方法,形成初步机器学习模型。
进一步地,在上述建模方法中,所述步骤S4中,对所述初步机器学习模型进行优化,具体步骤如下:
S61:将所述样本集带入所述初步机器学习模型进行学习,评估机器学习效率和精度;
S62:根据学习精度调整神经元数、层数、损失函数优化方法和步长;
S63:重复步骤S61~S62,直至学习效率和精度达到最优,建立初步尾退分离场景气动模型。
进一步地,在上述建模方法中,所述步骤S63中,学习效率和精度达到最优,具体为:在60000个学习步之内,拟合残差下降大于4个量级,验证集与模型预测对比均方差达到10-5量级。
进一步地,在上述建模方法中,所述步骤S5中,对初步尾退分离场景气动模型进行验证,具体为:
选取验证集中选取若干点输入到初步尾退分离场景气动模型中;
根据若干点与拟合点的均方差进行模型精度判断。
进一步地,在上述建模方法中,所述步骤S4中,初步尾退分离场景气动模型,包括输入量和输出量,所述输入量包括相对俯仰角、相对滚转角和相对位移;所述输出量包括母弹法向力、母弹轴向力、母弹俯仰力矩,子弹法向力、子弹轴向力和子弹俯仰力矩。
进一步地,在上述建模方法中,所述步骤S12中,气动设置项包括空间离散格式、时间推进格式、湍流模型、预处理和熵修正。
本发明与现有技术的有益效果在于:
(1)本发明建立了基于神经网络的尾退分离场景气动模型,通过此模型能够快速预测(计算时间为一秒量级)母弹与子弹气动力,避免了大量的CFD数值模拟工作量(每个工况计算时间为若干小时),为尾退分离场景中的分离轨迹与安全边界设计提供一种快速的气动力预测手段。
附图说明
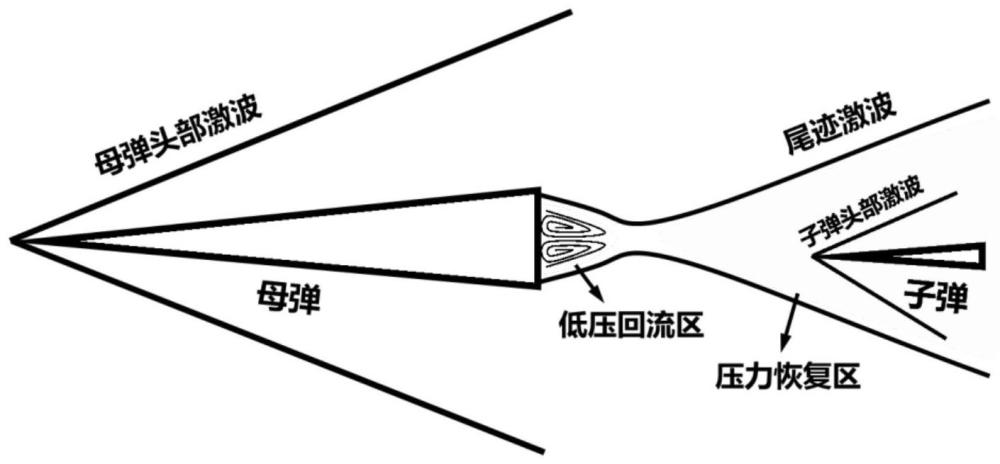
图1是本发明尾退分离场景;
图2是本发明神经网络输入量定义;
图3是本发明神经网络框架;
图4是本发明神经网络神经元与层数影响分析;
图5是本发明神经网络迭代过程;
图6是本发明气动模型验证测试;(a)为母弹俯仰力矩系数图,(b)为子弹俯仰力矩系数图。
具体实施方式
下面结合附图及具体实施方式对本发明专利做进一步详细说明。
如图1所示,本发明公开了一种基于神经网络的尾退分离场景气动建模方法,包含以下步骤:
步骤S1、建立气动力数据集;
步骤S2、将所述气动力数据集中一部分数据作为样本集,将剩余部分的数据作为验证数据,形成验证集;
步骤S3、建立初步机器学习模型;
步骤S4、对所述初步机器学习模型进行优化,建立初步尾退分离场景气动模型;
步骤S5、对所述初步尾退分离场景气动模型进行验证,如果模型精度达到要求,则得到最终的尾退分离场景气动模型,否则重复步骤S3~S4。
优选地,在步骤S1中,建立气动力数据集,具体为:
步骤S11、根据尾退分离飞行器的特点生成CFD数值模拟所需气动计算网格;
步骤S12、根据尾退分离飞行器的特点选取气动设置项进行初步气动计算,获得气动力与流场;
步骤S13、根据所述气动力与流场,进行网格加密,直至气动力几乎不变;
步骤S14、模拟尾退分离飞行器在相对姿态下的流场,获取气动力数据;
步骤S15、将所述气动力数据按照相对姿态进行排序,形成气动力数据集。
优选地,在步骤S11中,根据尾退分离飞行器的特点生成CFD数值模拟所需气动计算网格,具体为:
步骤S31:采用网格生成软件生成网格,导入尾退分离飞行器数模,包含母弹和子弹;
步骤S32:在飞行器数模边缘生成网格线connector;
步骤S33:在每个网格线connector上分布网格点,在具有较多分离流动的区域进行加密;
步骤S34:通过网格线connector生成网格面domain,并将网格面domain投影至数模表面,使网格贴体;
步骤S35:通过网格面domain生成网格块block,完成空间网格生成;
步骤S36:保持母弹不动,子弹根据相对姿态调整位置,重复步骤S31至步骤S35,最终形成在不同相对姿态下的飞行器网格。
优选地,在步骤S36中相对姿态,采用四维变量进行描述;所述四维变量,包括x方向相对距离,x方向相对距离,y方向相对距离、来流攻角α、相对姿态角az。
优选地,在步骤S3中,建立初步机器学习模型,具体步骤如下:
步骤S51:建立神经网络框架;
步骤S52:基于神经网络框架,设置神经网络层数;
步骤S53:设置神经网络每一层的神经元数;
步骤S54:将x方向相对距离,y方向相对距离、来流攻角α、相对姿态角进行归一化;
步骤S55:选取神经网络损失函数优化方法,形成初步机器学习模型。
优选地,在步骤S4中,对所述初步机器学习模型进行优化,具体步骤如下:
步骤S61:将所述样本集带入所述初步机器学习模型进行学习,评估机器学习效率和精度;
步骤S62:根据学习精度调整神经元数、层数、损失函数优化方法和步长;
步骤S63:重复步骤S61~S62,直至学习效率和精度达到最优,建立初步尾退分离场景气动模型。
优选地,在步骤S63中,学习效率和精度达到最优,具体为:在60000个学习步之内,拟合残差下降大于4个量级,验证集与模型预测对比均方差达到10-5量级。
优选地,在步骤S5中,对初步尾退分离场景气动模型进行验证,具体为:
选取验证集中选取若干点输入到初步尾退分离场景气动模型中;
根据若干点与拟合点的均方差进行模型精度判断。
优选地,在步骤S4中,初步尾退分离场景气动模型,包括输入量和输出量,所述输入量包括相对俯仰角、相对滚转角和相对位移;所述输出量包括母弹法向力、母弹轴向力、母弹俯仰力矩,子弹法向力、子弹轴向力和子弹俯仰力矩。
优选地,在步骤S12中,气动设置项包括空间离散格式、时间推进格式、湍流模型、预处理和熵修正。
实施例
本发明建立了基于神经网络的尾退分离场景气动模型,通过此模型能够快速预测(计算时间为一秒量级)母弹与子弹气动力,避免了大量的CFD数值模拟工作量(每个工况计算时间为若干小时),为尾退分离场景中的分离轨迹与安全边界设计提供一种快速的气动力预测手段,具有较强工程应用背景,对于我国未来先进飞行器的研制有重要意义。
本发明的具体实施步骤如下:
(1)根据尾退分离飞行器的特点生成CFD数值模拟所需气动计算网格,需要将尾退飞行器尾部轴向网格间距设置为母弹长度的1/500,以保证模拟精度。
(2)根据尾退分离飞行器的特点选取空间离散格式、时间推进格式、湍流模型、预处理、熵修正等气动设置项进行初步气动计算,获得气动力与流场,流场应包含压力、密度、温度、能量、速度等基本信息。
(3)根据步骤(2)中获得的初步流场与气动力,进行网格加密,直至气动力几乎不变,证明此网格规模为合理可信。
(4)模拟尾退分离飞行器在相对姿态下(包括x方向相对距离,y方向相对距离、来流攻角α、相对姿态角az)的流场,其中相对x方向距离与y方向距离最大设置为2倍母弹长即可满足建模要求。获取飞行器母弹与子弹的静态气动力与力矩。
(5)以步骤(4)中获得气动力数据为基础,将气动力数据整理成神经网络所需数据集。
(6)将步骤(5)中的数据集中80%的数据作为样本集,将剩余20%数据作为验证数据,形成验证集。
(7)形成初步机器学习模型,初步设定学习层数、每层神经元个数、损失函数优化方法等关键参数
(8)将步骤(6)中形成的样本集带入步骤(7)中形成的初步机器学习模型,评估机器学习效率、精度。
(9)调整学习层数、神经元个数、损失函数优化方法,直至学习效率、精度达到最优(在60000个学习步之内,拟合残差下降4个量级),从而建立尾退分离场景气动模型。
(10)将验证集中选取若干点作为验证输入带入步骤(9)中的气动模型,验证集与模型预测对比均方差达到10
本实施例采用基于神经网络的尾退分离场景气动建模方法,对尾退分离场景下的纵向平面内气动力进行建模与预测。
图1是尾退分离场景的典型描述,从图中可以看到,尾退分离飞行器包含母弹和子弹,子弹从母弹中弹射而出,由于子弹在母弹中的流动干扰区内,所以子弹与母弹存在较为复杂的气动干扰,因此母弹与子弹的气动力\力矩预测显得尤为重要。
首先需要对气动模型的输入量与输出量进行初步规划,由于本场景内只考虑纵向平面内的气动力预测,所以需要四个量便能够将该场景描述清楚,所以输入量有4个,如图2,分别为dx(相对x位移),dy(相对y位移),α(来流攻角),az(相对俯仰角)。因为要预测母弹与子弹的气动力与力矩,所以模型的输出量为6个量,分别为母弹法向力、母弹轴向力、母弹俯仰力矩、子弹法向力、子弹轴向力、子弹俯仰力矩。
然后,针对在不同输入量下(dx,dy,α,az)所对应的气动力进行计算,每个维度取5个点,取值如下:
dx=1m、2m、3m、4m、5m
dy=1m、2m、3m、4m、5m
α=-10°、-5°、0°、5°、10°
az=0°、4°、8°、12°、16°
因此一共需要计算4
接着,初步建立基于神经网络的气动模型,如图3,其中输入层为模型的输入量,输出层为模型的输出量,中间的隐藏层需要进一步测试确认。
为了能够对神经网络的层数、神经单元数进行合适的设置,分别采用神经单元数为4、8、16、24、32,神经网络隐藏层数为1、2、3、4来对神经网络的拟合精度进行测试。如图4,从图中可以看到,当隐藏层数为2、神经元数为16时,就可以达到较好的拟合精度,采用更多的隐藏层数与神经元数也不会进一步提高拟合精度,因此采用神经元数为16,隐藏层数为2层。
然后对气动模型进一步迭代,如图5,其中将样本集带入模型中,获得的为拟合值,将验证集带入气动模型中为预测值,从图中可以看到,拟合值与预测值在经过充分迭代之后逐渐收敛,模型的中的神经元参数调整至最佳。
最后将验证集带入气动模型进行验证,如图6,从图中可以看到,气动模型对该尾退场景下,母弹与子弹的气动力矩均有较好的预测,验证该气动模型是合理的。
以上是对基于神经网络的尾退分离场景气动建模方法的初步测试,从测试结果中我们可能够看到该方法所建立的气动模型框架具有较强的气动力预测能力。
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
- 一种基于多层神经网络的跨场景行人重识别的方法
- 基于残值神经网络的气动数据建模方法及系统
- 基于多项式拟合与神经网络的气动肌肉迟滞特性建模方法