立体触觉提供装置
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及立体触觉提供装置。更具体地,涉及一种通过提供从低频带至高频带的频率变化的同时刺激各感受器,从而提供各种触觉及具有立体感的触觉的立体触觉提供装置。
背景技术
人体皮肤具有4个代表性的皮肤机械性感受器(mechanoreceptor),它们被称为梅克尔细胞(Merkel cell)、触觉小体(Meissner corpuscle)、罗菲尼小体(Ruffinicorpuscle)、帕西尼氏小体(Pacinian corpuscle)。
梅克尔细胞在0-3Hz频带中动作,通过持续地对轻触和静态刺激做出反应起到使人产生认知的作用。触觉小体在3-40Hz频带中动作,主要对皮肤的颤抖等皮肤动态变形做出反应。罗菲尼小体在15-400Hz频带中动作,对皮肤的拉拽做出反应。最后,帕西尼氏小体在10-500Hz频带中动作,对皮肤感受到的振动刺激快速地做出反应。
梅克尔细胞和罗菲尼小体为慢适应感受器(Slow Adapting receptor,SA),如果皮肤产生变形则会对此做出持续的反应,触觉小体和帕西尼氏小体为快适应感受器(RapidAdapting receptor,RA),在皮肤受到刺激的开始和结束时会对一时的皮肤变形做出反应。
参照图1,可以确认人用手指捏住物体并向上抬的过程中的各感受器的反应。
其中,可以确认的是,SA1&SA2在为了抬物体手指弯曲时直到抬物体的期间对皮肤的绷紧持续地做出反应,RA1&RA2在最初接触物体时和将物体抬起放下时,即只在开始和结束时做出反应。
参照图2,可以确认各皮肤机械性感受器的基于频带的可认知的刺激阈值。其中,低频带(0-20Hz)相比于高频带(150-250Hz)需要更大刺激,具有最低阈值的频带可在200-300Hz附近。
因此,通过个别及选择性地刺激人体皮肤感觉感受器来提供各种触觉的触觉致动器的必要性正成增加的趋势。
上述的背景技术是发明人在构思出本发明的过程中获得或者学来的,不能认为是在本发明申请前对公众公开的公知技术。
发明内容
技术问题
因此,本发明是为了解决如上所述的现有技术的诸多问题而提出的,目的在于提供一种可通过以各种频带驱动多个致动器来个别及选择性地刺激人体皮肤感觉感受器,从而提供各种触觉的立体触觉提供装置。
此外,本发明的目的在于,提供一种可通过驱动多个致动器来向使用者提供更立体感的触觉的立体触觉提供装置。
然而,所述技术问题仅为示例性的,本发明的范围并不受限于此。
技术方案
本发明的上述目的可通过立体触觉提供装置来实现,所述装置包括:多个致动器,其相互隔开配置;连接部,其设置有多个致动器且包括至少三个触觉区域;以及控制部,其向致动器施加操作信号,控制部施加用于驱动致动器使其以阈值以上刺激第一触觉细胞的第一信号及用于驱动致动器使其以阈值以上刺激第二触觉细胞的第二信号,连接部能够通过多个致动器提供合成触觉。
此外,根据本发明的一实施例,控制部可施加用于控制多个致动器的电压、频率、波形中至少任意一个的操作信号。
此外,根据本发明的一实施例,控制部可与调节部连接并基于接收的控制信号向致动器施加操作信号,控制信号是组合至少两种触觉的产生强度的信号。
此外,根据本发明的一实施例,调节部可以是应用程序(app),或者是包括滚动条、按钮、均衡器中任意一个的调节机构,应用程序或者调节机构可控制触觉类型、触觉强度、触觉区域中的至少任意一个。
此外,根据本发明的一实施例,调节部可控制连接部的特定触觉区域中的触觉,连接部的特定触觉区域中的触觉是柔软、粗糙、轻飘、沉重、圆滑、尖锐中的至少任意一个。
此外,根据本发明的一实施例,第一触觉细胞作为慢适应感受器(Slow Adaptingreceptor,SA),可包括梅克尔细胞(Merkel cell)和罗菲尼小体(Ruffini corpuscle),第二触觉细胞作为快适应感受器(Rapid Adapting receptor,RA),可包括触觉小体(Meissner corpuscle)和帕西尼氏小体(Pacinian corpuscle)。
此外,根据本发明的一实施例,第一触觉细胞可包括在0Hz(超过0)至20Hz的低频带受到刺激的梅克尔细胞(Merkel cell)和触觉小体(Meissner corpuscle),第二触觉细胞可包括在150Hz至250Hz的高频带受到刺激的罗菲尼小体(Ruffini corpuscle),帕西尼氏小体(Pacinian corpuscle)。
此外,根据本发明的一实施例,连接部可提供包括振动、柔软、圆滑、轻敲、粗糙、尖锐中的至少两种触觉。
此外,根据本发明的一实施例,连接部上可设置有固定引导件,致动器被固定引导件支撑并固定在连接部上。
此外,根据本发明的一实施例,连接部上可形成有插槽,致动器可安置固定在插槽内。
此外,根据本发明的一实施例,形成有用于贯通连接部的贯通孔,致动器可插在贯通孔内。
此外,根据本发明的一实施例,包括形成有贯通孔的多个连接部,致动器可插在多个连接部的贯通孔内。
此外,根据本发明的一实施例,多个连接部中至少两个连接部可由相互不同的材料构成。
此外,根据本发明的一实施例,连接部分离成多个单位连接体,至少两个单位连接体上可设置有致动器。
此外,根据本发明的一实施例,至少一个单位连接体可由不同于剩余单位连接体的材料构成。
此外,根据本发明的一实施例,连接部可以是塑料、金属、玻璃、橡胶、木材中的任意一个材料。
此外,根据本发明的一实施例,致动器通过包括旋钮(knob)、粘合部中任意一个的连接单元设置在连接部上。
此外,根据本发明的一实施例,连接部的至少一部分可连接于对象物,并可通过对象物向使用者提供触觉。
此外,根据本发明的一实施例,连接部通过弹性部与对象物连接。
此外,根据本发明的一实施例,一个致动器朝向第一方向及与第一方向相反的第二方向传递触觉,至少两个致动器能够以不同的角度设置在连接部上以朝向相互不同的方向传递触觉。
此外,根据本发明的一实施例,致动器可设置在相距连接部的边框相当于连接部全长的25%至35%长度的位置。
此外,根据本发明的一实施例,连接部为矩形板状且两个致动器以对角线方向设置在连接部的角部时,致动器被施加200Hz至250Hz的正弦波信号时振动的强度为最大,越靠近振动强度大的位置,柔软触觉的强度就越大。
此外,根据本发明的一实施例,越靠近被施加正弦波信号的致动器,粗糙触觉的强度就越低,越靠近被施加正弦波信号的致动器,尖锐触觉强度就越大。
此外,根据本发明的一实施例,当致动器中一个被施加矩形波信号且剩余的一个被施加正弦波信号时,越是靠近被施加矩形波信号的致动器,圆滑触觉的强度就越大。
发明效果
根据如上所述结构的本发明,通过以各种频带驱动多个致动器来个别及选择性地刺激人体皮肤感觉感受器,从而具有能够提供各种触觉的效果。
此外,根据本发明,具有通过驱动多个致动器可向使用者提供更具立体感的触觉的效果。
当然如上所述的效果并不能够限制本发明的范围。
附图说明
图1是图示人用手指捏住物体并向上抬的过程中各感受器的反应的曲线图。
图2是图示各皮肤机械性感受器的基于频带的可认知的刺激阈值的曲线图。
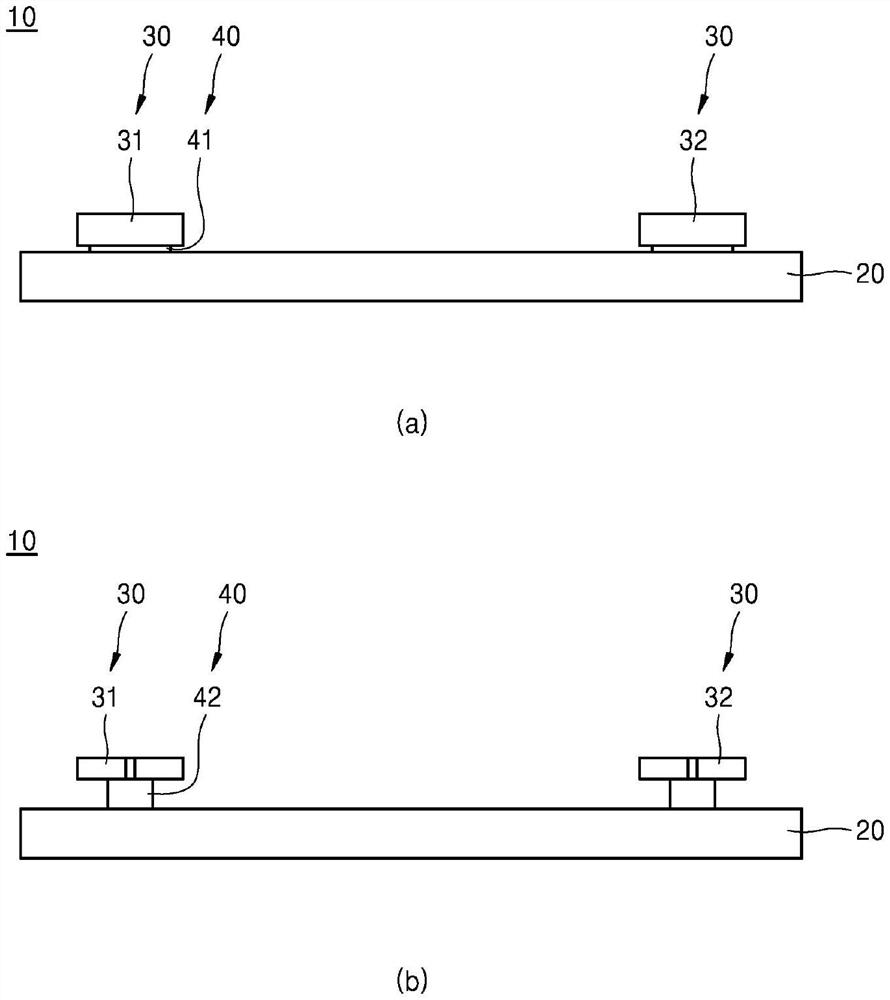
图3是根据本发明一实施例的立体触觉提供装置的截面示意图。
图4是根据本发明一实施例的立体触觉提供装置的连接关系的示意图。
图5是根据本发明的多个实施例的调节部的示意图。
图6至图8是根据本发明多个实施例的立体触觉提供装置的截面示意图。
图9是图示根据本发明一实施例的立体触觉提供装置与对象物的连接形态的截面示意图。
图10是图示根据本发明一实施例的立体触觉提供装置及立体触觉提供装置与对象物的连接形态的截面示意图。
图11是根据本发明一实施例的立体触觉提供装置的工作示意图。
图12是根据本发明一实验例的立体触觉提供装置的测定形态的示意图。
图13和图14是图示根据本发明一实验例的针对连接部结构的振动变化的曲线图。
图15和图16是图示根据本发明一实验例的针对测定位置及致动器的间隔的振动变化的曲线图。
图17是根据本发明另一实验例的立体触觉提供装置的测定形态的示意图。
图18至图20是图示根据本发明另一实验例的立体触觉提供装置的各区域的感觉形态的曲线图。
<附图标记>
10:立体触觉提供装置 20:连接部
20a-20d:单位连接体
30、31、32:致动器、第一致动器、第二致动器
40:连接单元 41:粘合部
42:旋钮 50:控制部
60:调节部 70:固定引导件
80:弹性部 100:对象物
200:调节机构
具体实施方式
对本发明的后述详细说明,可参照作为本发明可实施的特定实施例图示的附图。为了使本技术领域的技术人员能够实施本发明,下面具体说明这些实施例。充分详细地说明这些实施例,以使所属技术领域中具有通常知识者能够实施本发明。本发明的各种实施例应理解为互为不同但不相排斥。例如,在此记载的特定形状、结构及特性可将一实施例在不超出本发明的精神及范围的情况下实现为其他实施例。另外,公开的每一个实施例中的个别组成要素的位置或配置应理解为在不超出本发明精神及范围情况下可进行变更。因此,以下详细说明并非用于限定本发明,只要能适当地说明,本发明的范围仅由所附的权利要求和与其等同的所有范围限定。附图中类似的附图标记通过各个方面指代相同或类似的功能,为了方便起见,长度、面积及厚度等及其形态还可夸大表示。
本说明书中使用的术语“包含/包括”或“具有”等术语用于指示说明书中记载的特征、数字、步骤、操作、构件、组件或它们的组合的存在,但不排除一个或多个其它特征、数字、步骤、操作、构件、组件或它们的组合的存在或附加的可能性。
下面,为了能够使本领域技术人员容易实施本发明,参照附图对本发明涉及的优选实施例进行详细说明。
图3是根据本发明一实施例的立体触觉提供装置10d的截面示意图。图4是根据本发明一实施例的立体触觉提供装置的连接关系的示意图。图5是根据本发明多个实施例的调节部60的示意图。
参照图3,本发明的立体触觉提供装置10可包括连接部20、多个致动器30(31、32)及控制部50。
连接部20提供用于设置多个致动器30的区域。连接部20本身可提供触觉,或者也可以是连接部20与其它对象物100连接[参照图9]并由对象物100提供触觉。连接部20可通过多个致动器30提供合成触觉。
连接部20采用当致动器30产生振动时可传递触觉的材料,可包括塑料、金属、玻璃、橡胶、木材等。
为了能够设置多个致动器30且基于这些致动器30的驱动产生各种触觉,连接部20向一方向长长地延伸形成,或者可具有宽板状等。从另一观点,连接部20可具有包括提供触觉的多个虚拟区域的形态。该多个虚拟区域相比于物理上明确划分的区域应该理解为是指提供至少相互不同的触觉的区域。例如,如图3所示,当连接部20上配置两个致动器30时,还可以理解为连接部20包括第一区域[作为一例,致动器31的左侧区域]、第二区域[作为一例,致动器32的右侧区域]及第三区域[致动器31、32之间的区域]的三个区域,还可以理解为包括细分的、更多的区域。各致动器30提供的触觉在连接部20上经减弱后分布,因此连接部20可包括多个虚拟区域。
致动器30可使用公知的致动器,诸如包括利用共振频率最大化振动强度的线性共振致动器的惯性型致动器;具有光束(Beam)形态或者盘(Disk)形态且利用基于电磁场瞬间改变大小或者形状的压电元件进行驱动的压电致动器;通过在电活性聚合物膜上粘贴质量体并通过质量体的反复移动来产生振动的电活性聚合物致动器;通过利用在充电有相互不同电荷的两张玻璃面之间产生的引力和在充电有相同种类电荷时产生的排斥力进行驱动的静电力致动器等。
多个致动器30(31、32)可设置在连接部20上。图3图示了两个致动器31、32但是致动器30的数量可基于连接部20的形态、大小等进行调整。
控制部50可向多个致动器30施加操作信号。控制部50可使用公知的手段来施加用于控制致动器30的电压、频率、波形等的操作信号。
控制部50可通过有线或者无线与调节部60连接。调节部60向控制部50传递控制信号,控制信号可在控制部50转换成用于控制致动器30的操作信号。
调节部60可以是对象物100或者另外的调节机构200。其中,对象物100可连接或内置有立体触觉提供装置10,且作为当使用者的身体U局部接触时可接收触觉的物品,可以是智能手机显示器、智能手表等的终端装置;游戏操纵杆;汽车方向盘等。下面主要以智能手机显示器为例子进行说明。
作为一示例,参照图5的(a),调节部60为对象物100时,可通过应用程序(app)传递控制信号。应用程序在对象物100的显示画面110上驱动,应用程序画面可配置有用于调节触觉的类型(柔软-粗糙,轻飘-沉重,圆滑-尖锐)以及触觉的强度等级的滚动条。此外,显示有对应连接部20的多个触觉区域的区域R1-R6,也可通过选择特定区域R2并调节触觉的类型/强度。
作为另一示例,参照图5的(b),调节部60为调节机构200时,具有滚动条、按钮、均衡器等,从而可以以物理方式控制触觉的类型、触觉的强度、触觉区域等。各滚动条210(211、212、213、214…)对应触觉的类型,可根据上下调节滚动条210来调节相对应的触觉的强度。当然,如图5的(a)所示,调节机构200也可以是不直接包括立体触觉提供装置10的诸如智能手机、智能手表的终端装置、遥控器等。应用程序通过调节机构200的显示画面210驱动,并在应用程序上可控制触觉的类型、触觉的强度、触觉区域等。
由此,控制部50接收基于使用者控制调节部60[对象物100、调节机构200]而施加的控制信号,从而可施加用于控制致动器30的操作信号。调节部60作为控制施加到致动器30的操作信号的媒介而使用,可调节连接部20特定触觉区域中的触觉。特定触觉区域中的触觉可包括柔软、粗糙、轻飘、沉重、圆滑、尖锐中的至少任意一个。
尤其,本发明的特征是基于多个致动器30的驱动在连接部20的触觉区域提供合成触觉。每一个致动器30可通过控制部50接收不同触觉的类型/强度有关的操作信号,多个致动器30提供的合成触觉可通过连接部20提供。各触觉区域可根据合成触觉提供相互不同的触觉。
相互不同的触觉可指振动、柔软、圆滑、轻敲、粗糙、尖锐等触觉中的至少两种触觉由连接部20提供。此外,相互不同的触觉可指即使是相同感受的触觉(例如,振动)、强度、周期中明显区分的至少两种触觉由连接部20提供。为此,可分别控制致动器30(31、32)的电压、频率、波形、设置于连接部20上的位置等。
根据一实施例,多个致动器30(31、32)中至少一个能够以阈值以上刺激第一触觉细胞的方式驱动,至少另一个能够以阈值以上刺激第二触觉细胞的方式驱动。为了实现上述驱动,控制部可分别向致动器30施加第一信号以阈值以上刺激第一触觉细胞,并施加第二信号以阈值以上刺激第二触觉细胞。例如,第一触觉细胞为慢适应感受器(SA),可包括梅克尔细胞(Merkel cell)和罗菲尼小体(Ruffini corpuscle),第二触觉细胞为快适应感受器(RA),可包括触觉小体(Meissner corpuscle)和帕西尼氏小体(Pacinian corpuscle)。
根据另一实施例,多个致动器30(31、32)中至少一个可基于低频带(0-20Hz)驱动,至少另一个可基于高频带(150-250Hz)驱动。在低频带中驱动的致动器刺激对此反应灵敏的感受器(例如,梅克尔细胞、触觉小体),在高频带中驱动的致动器可刺激对此反应灵敏的感受器(例如,罗菲尼小体、帕西尼氏小体)。
如此,本发明能够对4种感受器全部进行刺激,从而具有可有效地传递各种触觉效果。此外,连接部20的每个区域提供合成触觉,从而具有通过各区域提供类型更丰富的触觉的效果。即,可提供立体触觉、立体式触觉。
致动器30可通过连接单元40设置在连接部20上。
作为一示例,参照图3的(a),连接部20上相互隔开地配置有多个致动器30(31,32),各致动器30可通过粘合部41与连接部20连接。粘合部41可将致动器30粘合在连接部20上,只要能够实现将致动器30的振动传递至连接部20的目的,可使用粘合剂、胶带等,对其没有特别限制。
作为另一示例,参照图3的(b),各致动器30可通过旋钮(knob)42连接在连接部20上。旋钮42具有能够将致动器30连接到连接部20的形态、结构,对其没有特别限制。
图6至图8是根据本发明多个实施例的立体触觉提供装置10的截面示意图。
参照图6的(a),多个致动器30(31、32)配置于连接部20上,用于配置多个致动器30的部分上设置有固定引导件70。固定引导件70可将致动器30固定在连接部20上。
例如,固定引导件70可粘合在连接部20或与连接部20形成一体。此外,固定引导件70可具有三角形、四边形或者圆形在内各种形状。此外,固定引导件70的至少一部分具有与致动器30的形状型合的形状以使致动器30的一部分插接。
参照图6的(b),多个致动器30(31、32)可安置并固定在连接部20上。连接部20具有下陷形状的插槽25,插槽25中可插入致动器30。
例如,插槽25中可插接致动器30。插槽25的形状和深度可基于致动器的形状和大小而具有各种形态。
参照图7的(a),多个致动器30可以插设在连接部20上。连接部20上形成有从一侧贯通至另一侧的贯通孔26,致动器30的一部分可插入在贯通孔26中。
例如,致动器30以插在贯通孔26的状态通过粘贴手段固定。相反,也可以是致动器30中形成有贯通孔(未图示)且连接部20插在贯通孔的形态。
参照图7的(b),可提供形成有贯通孔26的多个连接部20(21、22)。随着致动器30的一部分插入贯通孔26中,一个致动器30可插入多个连接部20。
例如,多个连接部20(21、22)可以是沿着长度方向平行地排列的形态。
例如,多个连接部20可具有相同的形态,但以相互不同的材料构成。此时,根据致动器30的操作,在第一连接部21和第二连接部22中提供的触觉可以相互不同。例如,如果两个第一连接部21和第二连接部22为薄板形态且十分靠近地配置,立体触觉提供装置10中第一面[第一连接部21]提供的触觉和第一面的相反面即第二面[第二连接部22]提供的触觉可显示为相互不同。
参照图8的(a),连接部20可分离成多个单位连接体20a、20b、20c及20d。多个单位连接体20a、20b、20c及20d中至少两个单位连接体20a、20d上可设置有致动器30。
例如,单位连接体20a、20b、20c及20d中任意一个可由不同于其他单位连接体采用的材料构成。如果角部侧的单位连接体20a、20d为相互不同的材料,则立体触觉提供装置10的左/右角部区域可提供相互不同的触觉。如果内侧区域的单位连接体20b、20c为相互不同的材料则左侧角部区域、右侧角部区域、内侧区域这三个区域可提供相互不同的触觉。作为一示例,假设角部区域的单位连接体20a、20d为硬质塑料材料,而剩余的单位连接体20b、20c为橡胶材料,则角部区域可提供具有细密且短频率形态的触觉(柔软,振动等),内侧区域可提供具有结合橡胶弹力的强且长频率形态的触觉(圆滑,轻敲等)。因此,具有根据使用者接触的部位不同而提供不同触觉的效果。
参照图8的(b),连接部20在分离成单位连接体20a、20b、20c及20d之后可重新组合。例如,单位连接体20a、20b、20c及20d可以是模块、方块形态。将除了单位连接体20c以外的三个单位连接体20a、20b及20d进行组合可制成另一立体触觉提供装置10。由于立体触觉提供装置10的长度和形态发生变化,因此触觉的提供形态也会发生变化。此外,本发明还可将立体触觉提供装置10实现为可拆卸式、模块式。
图9是图示根据本发明一实施例的立体触觉提供装置10与对象物100的连接形态的截面示意图。
参照图9的(a),立体触觉提供装置10可与各种对象物100连接并向对象物100提供触觉。
例如,假定对象物100为智能手机显示器,则立体触觉提供装置10可构成智能手机显示器的外壳。连接部20由塑料、金属等材料构成,可构成智能手机显示器的背面外壳的全部或者一部分。致动器30设置在外壳上并配置在智能手机的内部,基于多个致动器30产生的触觉可通过外壳[或者连接部20]沿着智能手机整体移动。因此,本发明的立体触觉提供装置10具有多个致动器30产生的振动沿着连接部20的面传递从而具有可向多方向(multi-direction)提供触觉的效果。
参照图9的(b),在图9的(a)的结构基础上,连接部20与对象物100[作为一示例,智能手机显示器]的连接部分之间可进一步设置有弹性部80。弹性部80可不受限制地使用具有弹性的弹簧、聚合物等。通过弹性部80可进一步提高致动器30的驱动效果。
例如,如图9的(b)所示,弹性部80朝垂直方向伸缩,可提高垂直方向的驱动幅度和强度。作为另一示例,弹性部80朝水平方向设置,也可进一步提高水平方向的驱动幅度和强度,还可以朝垂直/水平方向以外的其他方向设置。
另外,弹性部80可以是连接部20的一部分包括弹性体的结构。此时,弹性部80可形成在不靠近智能手机显示器的外壳部位上。
图10是图示根据本发明一实施例的立体触觉提供装置10[图10的(a),(b)]及立体触觉提供装置与对象物100的连接形态[图10的(c)]的截面示意图。
参照图10,根据一实施例的立体触觉提高装置10中,多个致动器30以隔开的状态设置在连接部20上且以相互不同的驱动方向进行设置。
例如,当水平设置致动器30时,可向第一方向及与其相反的第二方向(作为一示例,上下方向)驱动,连接部20上的一个致动器31水平设置并向上下方向驱动,另一个致动器32垂直设置并向左右方向驱动。
参照图10的(a),致动器30能够以驱动方向相互不同地配置的状态插入连接部20上下陷形成的槽25、26中。第一槽25和第二槽26为下陷形态,且以相互不同角度形成,各致动器30仅通过插设便可使驱动方向的取向方向相互不同。
参照图10的(b),连接部20进一步包括盖部23,而且连接部20上形成有一部分下陷的槽25、26,剩余的一部分下陷的槽27、28形成在盖部23上。第一槽25、27与第二槽26、28合起来可为与致动器30对应的形状。致动器30插在连接部20的槽25、26中且向上露出的部分可通过插入盖部23的槽27、28中而被覆盖。
参照图10的(c),致动器30以不同的驱动方向配置在连接部20上的状态下,连接部20可与对象物100连接。由此,本发明可具有直接向对象物100提供不同方向的触觉的效果。
例如,两个致动器30(31、32)以分别向垂直和水平方向提供振动地构成,从而可向智能手机显示器提供垂直、水平方向的触觉。致动器30可设置在外壳部分中相当于智能手机显示器的位置。此外,在触觉方向的基础上,通过使每个致动器31、32以不同的频率、波形驱动来混合各种触觉形态,从而进一步提供更加立体式触觉的效果。
图11是根据本发明一实施例的立体触觉提供装置10的工作示意图。
参照图11的(a),根据一实施例的立体触觉提供装置10为了单独地刺激4个皮肤机械性感受器,可施加具有各种波形、频率、电压等的输入信号。
例如,为了刺激低频带中反应灵敏的感受器(梅克尔细胞,触觉小体),可输入低频正弦波、矩形波或者三角波。此外,为了刺激高频带中反应灵敏的感受器(罗菲尼小体,帕西尼氏小体),可输入高频正弦波、矩形波或者三角波。
此外,多个致动器30中输入相同的输入信号,从而可增加输出信号的振幅。
此外,多个致动器30中可施加相互不同的输入信。图11的(a)图示了第一致动器31施加低频带正弦波且第二致动器32施加高频带矩形波的示例。除此之外,如图11的(b),每个致动器30分别施加不同的正弦波、矩形波、三角波等输入信号,根据相互不同的输入信号间的组合,致动器30可形成各种形态的输出信号。连接部20可接收多个致动器30提供的合成触觉,各致动器30提供的触觉在连接部20上衰减并可全面分布。需要说明的是,图11的(b)是不考虑衰减的多个致动器30的简单的合成信号。
另外,致动器30可施加有对应声源的输入信号。例如,第一致动器31可施加对应声源低频带的输入信号,第二致动器32可施加有对应声源高频带的输入信号。由此,通过两个致动器,并通过对应声源的立体式触觉效果能够有效地刺激4个皮肤机械性感受器。
作为另一示例,2个致动器连续通过从低频带到高频带的输入信号的频率变化来刺激各感受器,从而可提供基于频率变化的触觉。
根据一实施例的立体触觉提供装置10,通过分别调节输入到多个致动器30中的电压、频率或者波形,可提供现有的仅靠一个致动器30无法实现的同时多发性变化的触觉。在致动器30的电压、频率、波形的基础上,进一步结合致动器30的设置位置、方向,从而具有可使立体触觉提供装置10[或者连接部20]的整体作为触觉的提供源进行工作的效果。
图12是根据本发明一实验例的立体触觉提供装置10的测定形态的示意图。
根据一实验例,测定了基于连接部20的形状、致动器30的输入信号条件的振动力。如图12的(a)、(b)、(c)所示,使用了朝一方向长长地形成的连接部20。对连接部20的长度分别(a)为150mm、(b)为150mm、(c)为90mm,致动器31、32之间的间隔分别(a)为85.8mm,(b)为45.8mm,(c)为25.8mm,形态分别为开放型和闭合型的共6种连接部20进行了实验[开放型对应图7的(a)的形态,闭合型对应图6(b)的形态]。各致动器31、32分别配置在与连接部20的左侧端/右侧端相距(a)为20mm,(b)为40mm,(c)为20mm的位置。
在图12的(a)和(b)中,P1为左侧区域的测定点,P2-P4为中间区域的测定点,P5为右侧区域的测定点,在图12的(c)中,P1为左侧区域的测定点,P2为中间区域的测定点,P3为右侧区域的测定点。
致动器30的输入信号波形将正弦波(Sine wave)和矩形波(Rectangular wave)用在两个致动器31、32中,总共使用了4种输入信号条件。输入电压为正弦波时,输入不同的电压,如Sine 1V,2V,3V,4V。输入电压为矩形波时,输入不同的电压,如Rect 2V,3V,4V,5V。对于施加共振频率而言,正弦波使用210Hz,矩形波使用5Hz。
图13和图14是图示根据本发明一实验例的针对连接部20结构的振动变化的曲线图。
在各曲线图中,A1表示第一致动器31的驱动,A2表示第二致动器32的驱动,S表示正弦波,R表示矩形波,开放型如图7的(a)所示,是致动器30从连接部20向外部露出的形态,闭合型如图6的(b)所示,是致动器30下陷并插入连接部20的形态,85.8mm是指图12的(a)的测定形态,45.8mm是指图12的(b)的测定形态,25.8mm是指图12的(c)的测定形态。
首先,对于只驱动一个致动器,即只在A1或者A2中施加正弦波、矩形波的情况,观察到在相应的位置上显示出最大的振动强度而随着变远振动强度变低。只是,开放型显示出强度更大。
参照图13的(a)和(b),显示了A1、A2中均施加正弦波的情况或者均施加矩形波的情况。从图中观察到开放型相比于闭合型具有更大的强度。这是由于致动器30为贯通并插入连接部20的形态,因此相比于下陷的形态结构上相互之间干涉较小,从而显示出较大的力。
另外,如图13的(b)所示,A1、A2均施加矩形波时,图12的(a)、(b)、(c)均观察到最中间的P3[图12的(a)、(b)]、P2[图12的(c)]部分具有最大的力。
参照图14的(a)和(b),显示了通过在A1和A2中分别施加矩形波、正弦波来施加组合波形的状态。图14与图13相同,观察到开放型相比于闭合型具有更大的强度。
图15和图16是图示根据本发明一实验例的针对测定位置及致动器30的间隔的振动变化的曲线图。
首先,对于只驱动一个致动器,即只在A1或者A2中施加正弦波、矩形波的情况,观察到在相应的位置上显示出最大的振动强度而随着变远振动强度变低,但是正弦波相比于矩形波的情况显示出强度对距离较敏感。
参照图15的(a)和(b),显示了A1和A2均施加正弦波的情况或均施加矩形波的状态。从图中观察到开放型相比于闭合型具有更大的强度。
另外,如图15的(b)所示,A1、A2中均施加矩形波时,图12的(a)、(b)、(c)的形态中均观察到最中间的P3[图12的(a)、(b)]、P2[图12的(c)]部分具有最大的力。因此,可知矩形波在中心处显示更高的合成振动力。
参照图16的(a)和(b)可知,A1和A2中施加正弦波的地方显示出更大的力。闭合型相比于开放型显示出更强的线性,开放型显示出对施加正弦波的源位置更加敏感。
从图12至图16的结果可知,从形态来看,开放结构传递的力相比于闭合型最大增加40%。当合成矩形波时,中央部分具有更高的冲击量,当合成正弦波时,整体上具有类似于噪音形态的冲击量。当合成正弦波和矩形波时,正弦波源具有更高的冲击量,随着远离呈线性减小趋势。考虑到致动器30相互远离时正弦波的干扰变大,最有效的第一致动器31和第二致动器32的位置配置在连接部20的约1/3处附近以及相距连接部20边框相当于连接部20全长的约25-35%长度的位置。
图17是根据本发明另一实验例的立体触觉提供装置的测定形态的示意图。
根据一实验例,将立体触觉提供装置10连接到智能手机显示器后,测定了基于致动器30的输入信号条件的振动力。连接部20对应于智能手机的背面外壳,横向长度和纵向长度约为149mm和68mm。
第一致动器31和第二致动器32沿对角线方向配置。图17中,P1、P2、P3为上部区域的测定点,P4为中间区域的测定点,P5、P6、P7为下部区域的测定点。
致动器30的输入信号波形将正弦波(Sine wave)和矩形波(Rectangular wave)用在两个致动器31、32中,总共利用了4种输入信号条件。输入电压为正弦波时使用Sine2V,输入电压为矩形波时使用Rect3V,对于施加共振频率而言,正弦波使用100Hz、150Hz、200Hz、250Hz或350Hz,矩形波使用5Hz、10Hz、15Hz或20Hz。
图18至图20是根据本发明另一实验例的立体触觉提供装置的各区域的感觉形态的曲线图。图18显示P1-P3区域的测定数据,图19显示P3-P5区域的测定数据,图20显示P5-P7区域的测定数据。
作为基于频率的触觉变化,可在高频带区域中实现的感觉是微弱的感觉和圆滑的感觉,而越是靠近高频带可认知强、快,轻飘的感觉。
尤其,参照图18至图20可知,在P1-P7中,振动均在200-250Hz中显示出最大的冲击量。
轻敲的触觉如P3和P5可知,越是靠近致动器,触觉的强度就越大,中心部显示出对于共振敏感。
越是靠近共振,柔软触觉的强度就越大,从位置上,越是靠近轻敲的源越是柔软,而越是靠近振动变强的位置,柔软的触觉强度就越大。
越是靠近正弦波源,粗糙触觉的强度就越低,并且显示出与正弦波的共振无关。
越是靠近正弦波源,尖锐触觉的强度就越大,越是靠近共振越大,然而超出此范围也不会成比例地增加。
越是靠近矩形波源,圆滑触觉的强度就越大,且显示出与正弦波的共振无关。
再次参照图18可知,在P1-P3中振动为200Hz以上时没有明显的差异,然而越是靠近共振,柔软和圆滑的感觉增加。从位置上,越是靠近P3粗糙触觉增强,越是靠近P1,柔软和圆滑的触觉增加。
再次参照图19可知,在P3-P5中振动为200Hz以上时没有显示出明显的差异,然而越是靠近正弦波源,柔软的触觉增强。轻敲和粗糙的触觉和尖锐的触觉显示出与正弦波不存在依赖性。
再次参照图20可知,在P5-P7中振动为200Hz以上时没有明显的差异,为200Hz以上时,所有区域中与振动有关的特性没有明显的差异。此外,轻敲的触觉在下部中央区域P6显示为最弱。
观察图17至图20的结果可知,应用在智能手机显示器时,振动在正弦波为200-250Hz(共振频率210Hz)中显示出最大冲击量及感觉。矩形波波形不存在明显的差异,但随着频率的增加,显示出更高的冲击量。
如上所述,本发明通过以各种频带驱动多个致动器来个别及选择性地刺激人体皮肤感觉感受器,从而可提供振动、柔软、圆滑、轻敲、粗糙、尖锐等各种触觉。此外,驱动多个致动器的同时,通过连接部沿着整体面积多方向地提供触觉,并可基于不同区域提供不同的触觉形态,因此可为使用者提供更加立体式的触觉。
如上所述,本发明虽然参考附图对优选实施例进行了说明,但是本发明不受所述实施例限制,在不超出本发明精神的前提下本发明所属技术领域的普通技术人员可对其进行各种变形和变更。所述变形例和变更例应视为皆属于本发明及附上的权利要求书的范围。
- 立体触觉提供装置
- 触觉信息提供方法及触觉信息提供装置