一种超声C扫局部缺陷复现的机械手运动控制方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及测控自动化技术领域,具体涉及一种超声C扫局部缺陷复现的机械手运动控制方法。
背景技术
将工业领域广泛应用的机械手和超声无损检测技术相结合,可以代替人工实现对复杂构件的精确检测,同时提高检测效率和准确性。
在对构件完成扫查运动,生成超声C扫展开图像后,有时需要对工件的局部进行再次扫查以进一步确认缺陷信息。
机械手在进行超声扫查之前需要进行轨迹规划,获取扫查轨迹点包,如果按照原扫查点包对工件整体再扫查一遍,将会大大降低复检的效率。
如何有效提取局部缺陷相关的轨迹点,快速安全地开展指定缺陷区域的自动复检,对提高利用机械手进行超声检测的实用性具有重要意义。
发明内容
有鉴于此,本发明提供了一种超声C扫局部缺陷复现的机械手运动控制方法,能够在原始扫查轨迹点包中提取与局部缺陷区域相关的轨迹点,形成新的轨迹点包,由机械手按照新的轨迹点包再次扫查,进行复检的自动化超声检测方法。
为达到上述目的,本发明的技术方案包括如下步骤:
S1:对工件进行超声C扫,生成展开图像。
S2:在展开图像上找到缺陷复检区,选取缺陷复检区上两个对角点A和B,则A点和B点之间的行列区域是为期望复检区域,上位机在超声展开图中分别提取A点和B点的行列索引值(i,j)和(m,n)。
S3:在展开图像对应的扫查运动轨迹点包中分别提取行号在i和m之间,列号在j和n之间的位姿数据,并将位姿数据按照原行号和列号重新排序,形成复检扫查运动轨迹点包,由工业机械手控制按照复检扫查运动轨迹点包进行复检。
进一步地,S1中,超声C扫的扫查运动由工业机械手控制,扫查模式是逐行逐点往复扫查。
进一步地,展开图像是左对齐,逐行逐点绘制,展开图像上的每个像素点对应唯一的行列号。
进一步地,S3中,由工业机械手控制按照复检扫查运动轨迹点包进行复检之后,还包括,得到新的展开图像,返回S2,找到新的缺陷复检区,进行再次复检。
进一步地,S3中,在展开图像的扫查运动轨迹点包中分别提取行号在i和m之间,列号在j和n之间的位姿数据,并将位姿数据按照原行号和列号重新排序,形成复检扫查运动轨迹点包,具体为:
S301、以A点为缺陷复检区的左上角,B点为缺陷复检区的右下角点;A点和B点包围区域中各像素点的行列索引值为(l,c)。
l的初始值取为i,c的初始值取为j。
S302、判断l是否为奇数行;若是,则执行S303,否则执行S305。
S303、计算(l,c)在展开图像对应的扫查运动轨迹点包中对应位姿数据的索引序号index(l,c)为l之前各行点数之和加上c。
S304、c自增1,判断c≤n是否成立,若是则返回S303,否则执行S307。
S305、计算(l,c)在展开图像对应的扫查运动轨迹点包中对应位姿数据的索引序号index(l,c)为l行以及l之前各行点数之和减去(c-1)。
S306、c自减1,判断c≥j是否成立,若是则返回S305,否则执行S307。
S307、l自增1,判断l≤m是否成立,若是则返回S302,否则执行S308。
S308、在展开图像对应的扫查运动轨迹点包中,提取与A、B点包围区域中各像素点对应的位姿数据的索引序号index(l,c),l取遍[I,m]中整数,c取遍[j,n]中整数;并将位姿数据按照原行号和列号重新排序,形成复检扫查运动轨迹点包。
有益效果:
本发明提出一种基于超声C扫展开图进行局部缺陷复检的机械手运动控制方法,这种方法不需要对复检区域重新进行轨迹规划,仅提取与复检区域相对应的轨迹点,既克服了机械手沿原扫查轨迹点包全部重新扫查的低效率问题,又避免了重新轨迹规划带来的碰撞问题。
附图说明
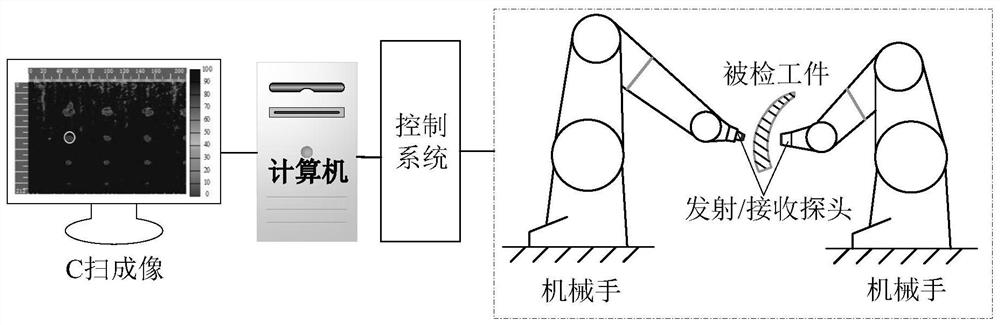
图1为本发明提供的机械手超声C扫过程及C扫展开图;
图2为本发明提供的逐行逐点往复超声扫查及复检区域选择示意图;
图3为本发明提供的基于超声C扫展开图提取新扫查运动轨迹点包流程图。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
本发明提供了一种超声C扫局部缺陷复现的机械手运动控制方法,包括如下步骤:
S1:对工件进行超声C扫,生成展开图像;
首先根据被检工件的检测范围,规划出原始超声扫查的机械手运动轨迹,机械手按照规划轨迹进行初次超声扫查并生成C扫展开图像,扫查模式是逐行逐点往复扫查,展开图像是左对齐,逐行逐点绘制,图像上的每个像素点对应唯一的行列号。
S2:在展开图像上找到缺陷复检区,选取缺陷复检区上两个对角点A和B,则A点和B点之间的行列区域是为期望复检区域,上位机在超声展开图中分别提取A点和B点的行列索引值(i,j)和(m,n);
S3:按照C扫展开图的成像方法,像素点跟原始扫查运动轨迹点包中的轨迹点是一一对应的,因此,可以根据复检区域像素点的行列索引值从原始扫查运动轨迹点包中提取出对应的轨迹点,即在展开图像对应的扫查运动轨迹点包中分别提取行号在i和m之间,列号在j和n之间的位姿数据。将这些轨迹点按照原来的行号和列号重新排序,形成新的扫查运动轨迹点包。
将新扫查运动轨迹点包下载到机械手的控制器中,启动机械手重新进行超声扫查,可以完成对所选区域的复检。如果需要对其他区域的缺陷进行复检,可重新选择两点A和B,重新提取并生成新的扫查运动轨迹点包,如此可以对工件任意局部缺陷进行多次复检。
其中在展开图像对应的扫查运动轨迹点包中分别提取行号在i和m之间,列号在j和n之间的位姿数据,具体步骤如图3所示,包括如下步骤:
S301、以A点为缺陷复检区的左上角,B点为缺陷复检区的右下角点;A点和B点包围区域中各像素点的行列索引值为(l,c)。
l的初始值取为i,c的初始值取为j。
S302、判断l是否为奇数行;若是,则执行S303,否则执行S305。
S303、计算(l,c)在展开图像对应的扫查运动轨迹点包中对应位姿数据的索引序号index(l,c)为l之前各行点数之和加上c。
S304、c自增1,判断c≤n是否成立,若是则返回S303,否则执行S307。
S305、计算(l,c)在展开图像对应的扫查运动轨迹点包中对应位姿数据的索引序号index(l,c)为l行以及l之前各行点数之和减去c-1。
S306、c自减1,判断c≥j是否成立,若是则返回S305,否则执行S307。
S307、l自增1,判断l≤m是否成立,若是则返回S302,否则执行S308。
S308、在展开图像对应的扫查运动轨迹点包中,提取与A、B点包围区域中各像素点对应的位姿数据的索引序号index(l,c),l取遍[I,m]中整数,c取遍[j,n]中整数;并将位姿数据按照原行号和列号重新排序,形成复检扫查运动轨迹点包。
参见图1,该图为本实施例提供的机械手超声C扫过程及C扫展开图,由计算机控制机械手夹持超声探头沿工件表面规划的轨迹自动连续往复扫查,将各个扫查位置和接收的超声信号以图像的方式显示在屏幕上。当工件表面是曲面时,可以用超声C扫展开图来显示扫查结果。超声C扫展开图是按照扫查次序,将各个扫查点逐行逐列依次与屏幕上的像素点对应,而不考虑扫查点的实际位置,是超声检测中常用的一种结果显示方法。根据被检工件材料的不同,可以采用一个机械手夹持一个超声探头完成反射式超声扫查,也可以采用两个机械手分别夹持一个超声探头完成透射式超声扫查,两种方式的超声C扫展开图一样。
往复超声扫查过程如图2所示,假设机械手沿着第一条轨迹从左到右扫查,完成后,进行下一条轨迹的扫查时就从右往左,如此反复。往复扫查时,机械手在去程和回程都进行超声扫查,提高了超声扫查的效率。由于机械手在进行超声扫查之前要先进行轨迹规划,因此,可以在扫查之前获得总扫查行数及各扫查行的扫查点数,在对扫查结果进行成像时,可以按照原来的扫查行及各行点数依次顺序显示。为了显示效果的统一,规定扫查行由上往下显示,扫查列左对齐,奇数行的扫查点由左到右显示,偶数行的扫查点由右往左显示。超声C扫展开图上的每个像素点都有唯一的行列号,并与扫查轨迹点包的位姿唯一对应。复检区域是指在超声C扫展开图上选择的一小部分区域,操作者希望对该部分区域再次扫查,以进一步核实该区域的缺陷信息。选择方法可以在图像上选择A、B两点,其行列号分别记为(i,j)和(m,n),这样在图像上i行和m行之间,j列和n列之间包围的矩形区域就是缺陷复检区域,为了便于问题描述,这里规定A在左上角,B在右下角,即i<m,j<n。由前面的分析可知,该区域只对应原超声扫查轨迹的一小部分,如何提取这部分轨迹点,形成新的扫查轨迹,由机械手夹持超声探头,对所选局部区域进行自动超声扫查,就是本发明的主要内容。复检区域的点有的位于奇数行,其成像方式是从左到右;有的位于偶数行,成像方式是从右到左,因此,对于奇数行和偶数行的像素点应该采取不同的轨迹点提取措施。
假设在图2上选择了A、B两点所包围的复检区域,图中空心圆表示所选择的点。A位于第三行第四列,记为(3,4),B位于第四行第六列,记为(4,6),该区域由行列号为(3,4),(3,5),(3,6),(4,4),(4,5),(4,6)的六个点组成。按照图3所示的流程,根据这六个点的行列号,在原始扫查轨迹点包里搜索对应的轨迹点。第三行是单数行,成像方向与扫查运动方向一致,(3,4)点与原始扫查点包对应的索引序号为19(第一行的点数7+第二行的点数8+第三行的列号4),(3,5)与(3,6)对应的索引序号为20和21。第四行是偶数行,成像方向与扫查运动方向相反,扫查轨迹点包是按照扫查顺序排序,因此,第四行提取轨迹点的顺序是(4,6),(4,5),(4,4)。与(4,6)对应的索引号是28(第一行的点数7+加第二行的点数8+第三行的点数9+第四行的点数9减去(6-1),6为B所在的列号),(4,5)与(4,4)对应的索引序号为29和30。新的轨迹点包各个轨迹点在原始扫查轨迹点包里对应的索引号构成如下:
第一行:第19点
第20点
第21点
第二行:第28点
第29点
第30点
将新的轨迹点包下载到机械手的控制器中,机械手将夹持超声探头沿着原轨迹点包的“第19点→第20点→第21点→第28点→第29点→第30点”依次完成局部扫查运动,形成新的扫查图像,完成对局部缺陷的复检。
至此,根据本实施例提出的基于超声C扫展开图进行局部缺陷复检的机械手运动控制方法,可以实现安全高效的局部缺陷复检。
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种超声C扫局部缺陷复现的机械手运动控制方法
- 一种超声C扫局部缺陷复现的机械手运动控制方法