一种框架式地砖铺贴机器人
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及地砖铺贴施工技术领域,特别涉及一种框架式地砖铺贴机器人。
背景技术
在建筑施工过程中,经常会进行地砖铺贴,传统的地砖铺贴采用人工完成,需要工人逐个铺贴,由于地砖质量较重,且铺设面积往往较大,导致铺贴速度慢,铺贴效率低,严重影响了施工进度,还可以进一步作出改进。另外,现有的少部分地砖铺贴机器人的结构过于复杂,适用性不高等缺陷。
发明内容
为解决上述问题,本发明旨在提出一种框架式地砖铺贴机器人,设置用于铺设地砖的移动机器人、X轴移动轨道以及Y轴移动轨道,移动机器人驱动套接于X轴移动轨道上,X轴移动轨道的两端均可移动式连接在Y轴移动轨道上,实现了用于铺设地砖的移动机器人的X轴、Y轴位移,从而实现全方位自动铺设地砖。
为达到上述目的,本发明的技术方案是这样实现的:
一种框架式地砖铺贴机器人,包括用于铺设地砖的移动机器人、X轴移动轨道以及Y轴移动轨道,移动机器人驱动套接于X轴移动轨道上,X轴移动轨道的两端均可移动式连接在Y轴移动轨道上。
进一步的,所述用于铺设地砖的移动机器人包括移动框、第一驱动齿轮、真空泵、驱动轴、主电推杆、连接软管、第一驱动电机以及吸盘,所述移动框内部通过驱动轴转动连接有第一驱动齿轮,其中,驱动轴贯穿移动框并通过轴承与移动框转动连接;所述移动框正立面固定安装有第一驱动电机,且第一驱动电机输出端与驱动轴一端固定连接,移动框底面贯穿固定连接有主电推杆,且主电推杆的输出端固定安装有吸盘,移动框内部固定安装有真空泵,且真空泵输出端通过连接软管与吸盘顶面贯通连接。
进一步的,所述用于铺设地砖的移动机器人还包括副电推杆以及胶锤,所述主电推杆两侧竖向固定安装有副电推杆,且副电推杆的输出端固定安装有胶锤。
进一步的,所述吸盘底面粘贴有橡胶垫圈,且橡胶垫圈底面与胶锤底面位于同一平面内。
进一步的,所述移动框内部安装有第一蓄电池,为真空泵、第一驱动电机、主电推杆和副电推杆供电。
进一步的,所述X轴移动轨道包括至少一个连箱、边箱以及两个端箱,两个端箱之间依次通过边箱、连箱配合连板、螺栓拼接形成轨道,轨道上部顶面连续开设有第一齿牙,且第一齿牙与第一驱动齿轮啮合。
进一步的,所述Y轴移动轨道包括轨道杆,所述轨道杆顶面固定安装有轨道槽,且轨道槽内部开设有第二齿牙,所述端箱内部固定安装有第二驱动电机,且第二驱动电机输出端连接有第二驱动齿轮,端箱底面固定安装有齿轮箱,且齿轮箱内部通过轮轴转动连接有从动齿轮,并且从动齿轮与第二驱动齿轮啮合,轮轴贯穿齿轮箱并通过轴承与齿轮箱转动连接,所述第二齿牙与从动齿轮啮合。
进一步的,所述移动框正立面安装有PLC控制器,且PLC控制器输出端分别与真空泵、第一驱动电机、第二驱动电机和主电推杆电性连接。
进一步的,所述轨道杆设置有多个,且轨道杆底面竖向固定安装有伸缩立柱,伸缩立柱设置有多个,并且伸缩立柱底面固定安装有底脚,轨道杆顶面一侧边缘焊接有连墙板,且连墙板表面开设有通孔用于铆钉穿过进行固定,轨道杆设置有多个,且轨道杆之间通过连板、螺栓固定连接。
进一步的,所述边箱内部固定安装有第二蓄电池为第二驱动电机供电,所述第一驱动电机和第二驱动电机均采用伺服电机,且第二驱动电机同步工作便于编程控制。
有益效果:本发明通过X轴移动轨道以及X轴移动轨道两端的Y轴移动轨道实现了用于铺设地砖的移动机器人的X轴、Y轴位移,从而用于铺设地砖的移动机器人可在X轴移动轨道以及X轴移动轨道两端的Y轴移动轨道组成的移动框架内任意移动,实现了全方位自动铺设地砖。
附图说明
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
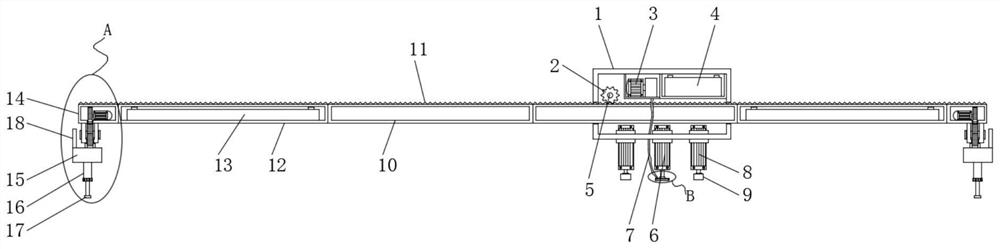
图1为本发明实施例所述的框架式地砖铺贴机器人的结构示意图;
图2为本发明实施例所述的框架式地砖铺贴机器人的主视图;
图3为本发明实施例所述的框架式地砖铺贴机器人的俯视图;
图4为本发明实施例所述的框架式地砖铺贴机器人的A节点放大图;
图5为本发明实施例所述的框架式地砖铺贴机器人的B节点放大图;
图6为本发明实施例所述的框架式地砖铺贴机器人的轨道杆的结构示意图;
图7为本发明实施例所述的框架式地砖铺贴机器人的连箱的结构示意图。
具体实施方式
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面将参考附图并结合实施例来详细说明本发明。
实施例1
参见图1-7:一种框架式地砖铺贴机器人,包括用于铺设地砖的移动机器人、X轴移动轨道以及Y轴移动轨道,移动机器人驱动套接于X轴移动轨道上,X轴移动轨道的两端均可移动式连接在Y轴移动轨道上。
本实施例通过X轴移动轨道以及X轴移动轨道两端的Y轴移动轨道实现了用于铺设地砖的移动机器人的X轴、Y轴位移,从而用于铺设地砖的移动机器人可在X轴移动轨道以及X轴移动轨道两端的Y轴移动轨道组成的移动框架内任意移动,实现了全方位自动铺设地砖。
在一具体的实例中,所述用于铺设地砖的移动机器人包括移动框1、第一驱动齿轮2、真空泵3、驱动轴5、主电推杆6、连接软管7、第一驱动电机19以及吸盘20,所述移动框1内部通过驱动轴5转动连接有第一驱动齿轮2,其中,驱动轴5贯穿移动框1并通过轴承与移动框1转动连接;所述移动框1正立面固定安装有第一驱动电机19,且第一驱动电机19输出端与驱动轴5一端固定连接,为常见驱动形式,移动框1底面贯穿固定连接有主电推杆6,且主电推杆6的输出端固定安装有吸盘20,移动框1内部固定安装有真空泵3,且真空泵3输出端通过连接软管7与吸盘20顶面贯通连接,连接软管7的长度不影响吸盘20上下移动。
在一具体的实例中,所述用于铺设地砖的移动机器人还包括副电推杆8以及胶锤9,所述主电推杆6两侧竖向固定安装有副电推杆8,且副电推杆8的输出端固定安装有胶锤9。
需要说明的是,在地砖铺贴好之后,副电推杆推动胶锤往复下移,完成对地砖的击打夯实,减少空鼓现象。
在一具体的实例中,所述吸盘20底面粘贴有橡胶垫圈30,且橡胶垫圈30底面与胶锤9底面位于同一平面内。
本实施例可以避免胶锤过度击打地砖导致标高下移。
在一具体的实例中,所述移动框1内部安装有第一蓄电池4,为真空泵3、第一驱动电机19、主电推杆6和副电推杆8供电。
本实施例通过第一蓄电池省去了拉扯电线的麻烦,提高了结构的简洁性,进一步方便了安装和使用。
在一具体的实例中,所述X轴移动轨道包括至少一个连箱10、边箱12以及两个端箱14,两个端箱14之间依次通过边箱12、连箱10配合连板21、螺栓22拼接形成轨道,轨道上部顶面连续开设有第一齿牙11,且第一齿牙11与第一驱动齿轮2啮合。
需要说明的是,本实施例的移动框,连箱、边箱和端箱截面尺寸相同,便于移动框移动。
在一具体的实例中,所述Y轴移动轨道包括轨道杆15,所述轨道杆15顶面固定安装有轨道槽23,且轨道槽23内部开设有第二齿牙24,所述端箱14内部固定安装有第二驱动电机27,且第二驱动电机27输出端连接有第二驱动齿轮26,端箱14底面固定安装有齿轮箱25,且齿轮箱25内部通过轮轴29转动连接有从动齿轮28,并且从动齿轮28与第二驱动齿轮26啮合,轮轴29贯穿齿轮箱25并通过轴承与齿轮箱25转动连接,所述第二齿牙24与从动齿轮28啮合。
在进行铺贴工作时,第一驱动电机带动第一驱动齿轮转动,第一驱动齿轮与第一齿牙啮合,从而带动移动框沿X轴移动,同理,第二驱动电机带动第二驱动齿轮转动,进而带动从动齿轮转动,从动齿轮与第二齿牙啮合,进而带动移动框沿Y轴移动,吸盘在移动框的带动下移动至地砖上料位置处,并移动到地砖上方,主电推杆伸长,推动吸盘底面抵接地砖顶面,真空泵抽取吸盘中的空气,使吸盘吸住地砖,而后,电推杆收缩,移动框带动地砖移动至铺贴位置,即可二次伸长主电推杆,将地砖铺贴至铺贴位置,完成自动铺贴,省去了人工铺贴的麻烦,提高了铺贴效率,减少人工投入,提高了施工效率。
在一具体的实例中,所述移动框1正立面安装有PLC控制器,且PLC控制器输出端分别与真空泵3、第一驱动电机19、第二驱动电机27和主电推杆6电性连接。
工作人员可通过PLC设定第一驱动电机、第二驱动电机启停时间,从而带动吸盘移动到不同的位置,完成位置转换,便于铺贴不同位置的地砖,同时也可通过PLC控制真空泵启闭时间和主电推杆伸缩时间,控制吸取和放下地砖时间,完成自动铺贴过程,为工业生产领域常见控制结构,可在工厂根据房间尺寸定制完成,在此不做过多赘述。
在一具体的实例中,所述轨道杆15设置有多个,且轨道杆15底面竖向固定安装有伸缩立柱16,伸缩立柱16设置有多个,并且伸缩立柱16底面固定安装有底脚17,轨道杆15顶面一侧边缘焊接有连墙板18,且连墙板18表面开设有通孔31用于铆钉穿过进行固定,轨道杆15设置有多个,且轨道杆15之间通过连板21、螺栓22固定连接。
工作人员可根据房间尺寸选择安装连箱的数量,从而改变移动框沿X轴移动的距离,同理,工作人员还可以根据房间尺寸选择轨道杆数量,从而改变移动框沿Y轴的移动距离,连箱和轨道杆长度可以根据房间尺寸在工厂内定制,而后在施工现场进行拼装,提高了安装的灵活性,便于施工操作,安装时,可首先组合连箱、边箱和端箱,连箱、边箱和端箱均通过连板固定连接,在安装轨道杆时,可将轨道杆靠墙面安装,调节轨道杆底面的伸缩立柱至主电推杆伸长时吸盘底面与地砖铺贴顶面位于同一平面,即可完成标高控制,保证了后期铺贴的平整度,调节好高度后,使用铆钉将连墙板与墙面固定即可完成轨道杆固定,而后将组合好的连箱、边箱和端箱放在轨道杆顶面,使从动齿轮与第二齿牙啮合,即可完成安装,本装置可拆卸拼装,适合不同房间尺寸,便于进入到房间中,不受门洞尺寸限制,且通过调节伸缩立柱即可完成标高控制,结构简单,操作方便,适合大范围推广使用。
在一具体的实例中,所述边箱12内部固定安装有第二蓄电池13为第二驱动电机27供电,所述第一驱动电机19和第二驱动电机27均采用伺服电机,且第二驱动电机27同步工作便于编程控制。
本实施例通过第二蓄电池省去了拉扯电线的麻烦,提高了结构的简洁性,进一步方便了安装和使用;另外,由于X轴移动轨道的两端的边箱内均配设有第二驱动电机,且通过第二驱动电机X轴移动轨道的两端同步在Y轴移动轨道上移动,因此,两个第二驱动电机通过编程即可同步工作。
综上所述,本发明采用连箱、边箱和端箱组成X轴移动轨道,通过轨道杆组成Y轴移动轨道,通过主电推杆的伸缩形成Z轴移动,从而可将地砖移动至房间内任意位置进行铺贴,在进行铺贴工作时,第一驱动电机带动第一驱动齿轮转动,第一驱动齿轮与第一齿牙啮合,从而带动移动框沿X轴移动,同理,第二驱动电机带动第二驱动齿轮转动,进而带动从动齿轮转动,从动齿轮与第二齿牙啮合,进而带动移动框沿Y轴移动,吸盘在移动框的带动下移动至地砖上料位置处,并移动到地砖上方,主电推杆伸长,推动吸盘底面抵接地砖顶面,真空泵抽取吸盘中的空气,使吸盘吸住地砖,而后,电推杆收缩,移动框带动地砖移动至铺贴位置,即可二次伸长主电推杆,将地砖铺贴至铺贴位置,完成自动铺贴,省去了人工铺贴的麻烦,提高了铺贴效率,减少人工投入,提高了施工效率。
本发明采用了连箱、边箱和轨道杆,工作人员可根据房间尺寸选择安装连箱的数量,从而改变移动框沿X轴移动的距离,同理,工作人员还可以根据房间尺寸选择轨道杆数量,从而改变移动框沿Y轴的移动距离,连箱和轨道杆长度可以根据房间尺寸在工厂内定制,而后在施工现场进行拼装,提高了安装的灵活性,便于施工操作,安装时,可首先组合连箱、边箱和端箱,连箱、边箱和端箱均通过连板固定连接,在安装轨道杆时,可将轨道杆靠墙面安装,调节轨道杆底面的伸缩立柱至主电推杆伸长时吸盘底面与地砖铺贴顶面位于同一平面,即可完成标高控制,保证了后期铺贴的平整度,调节好高度后,使用铆钉将连墙板与墙面固定即可完成轨道杆固定,而后将组合好的连箱、边箱和端箱放在轨道杆顶面,使从动齿轮与第二齿牙啮合,即可完成安装,本装置可拆卸拼装,适合不同房间尺寸,便于进入到房间中,不受门洞尺寸限制,且通过调节伸缩立柱即可完成标高控制,结构简单,操作方便,适合大范围推广使用。
本发明采用了副电推杆和胶锤,副电推杆的输出端固定安装有胶锤,在地砖铺贴好之后,副电推杆推动胶锤往复下移,完成对地砖的击打夯实,减少空鼓现象,另外,在移动框内部安装有第一蓄电池,为真空泵、第一驱动电机、主电推杆和副电推杆供电,而在端箱内部安装有第二蓄电池,为第二驱动电机供电,省去了拉扯电线的麻烦,提高了结构的简洁性,进一步方便了安装和使用。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 用于地砖铺贴的砂浆的制备方法
- 一种铺贴装置、地砖铺贴机器人及地砖铺贴方法
- 一种地砖铺贴装置及地砖铺贴机器人