光学自由曲面的子孔径拼接干涉测量装置及方法
文献发布时间:2023-06-19 18:35:48
技术领域
本发明属于光干涉计量测试领域,特别是一种光学自由曲面的子孔径拼接干涉测量装置及方法。
背景技术
光学自由曲面因其较大的表面设计自由度,具有良好的像差校正能力,在众多领域应用愈加广泛。但同时,自由曲面的高精度面形计量又是一个巨大挑战。干涉测量法因其高精度、非接触的技术优势在众多方法中脱颖而出。对于传统干涉测量装置,由于自由曲面相对标准球面有偏离,表面反射的光束将与参考光形成致密条纹。当偏离较大时,会使条纹太密无法解析,超出干涉仪的动态范围。研究人员通过引入各种相位补偿器来尝试解决这一问题。但相位补偿器通常都是针对某一具体对象进行设计,不容易直接迁移至其它元件测量中,导致测量成本增加。
为了解决相位补偿的适应性问题,可变相位补偿器应运而生。这类补偿器通过状态可变的光学器件或可编辑的面形补偿器来实现可变相位补偿。常见的可变相位补偿器有空间光调制器(SLM)和变形反射镜(DM)、旋转CGH相位板等。这些补偿器存在两个问题:第一,对于具有大动态范围的正球差和负球差交替变化的复杂曲面,例如鸥翼型的复杂曲面,它们无法进行全范围的补偿;第二,大动态范围的补偿相位的在位测量存在很大的困难,补偿相位的测量精度将会影响每个子孔径的校正相位以及待测相位的拼接精度。因此,可变相位补偿器的组成方案和在位测量方法在光学自由曲面的干涉测量技术中非常重要。
发明内容
本发明的目的在于提供一种光学自由曲面的子孔径拼接干涉测量装置及方法,以解决可变相位补偿器的大动态范围相位补偿和在位测量难题。
实现本发明目的的技术解决方案为:一种光学自由曲面子孔径拼接干涉测量装置,所述装置包括沿光轴依次设置的激光干涉仪、可变相位补偿器和待测镜,其中待测镜置于多轴运动台上;
所述激光干涉仪,用于产生光学自由曲面干涉测量的测试光;
所述可变相位补偿器,用于补偿每个子孔径的波前相位,使每个子孔径获得稀疏的干涉条纹;
所述多轴运动台,用于控制待测镜的多轴运动。
进一步地,所述可变相位补偿器包括沿光轴设置的双自由曲面镜和双楔板;其中,所述双自由曲面镜靠近激光干涉仪,包括沿光轴依次设置的第一自由曲面镜和第二自由曲面镜;所述双楔板包括沿光轴依次设置的第一楔板和第二楔板;
所述双自由曲面镜为平面-自由曲面结构,自由曲面面形方程为:
z=A(xy
式中,z为光轴方向的坐标,且向右为正向;x为垂直于z轴且平行于纸面的坐标,且向上为正向;y为垂直于光轴且垂直于纸面的坐标,且垂直于纸面向外为正向;A、D、E均为自由曲面系数;
所述双自由曲面镜垂直于光轴放置且两个自由曲面相对设置,初始状态为共轴心;若第一自由曲面镜由初始状态向x正向平移,第二自由曲面镜由初始状态向x负向平移,则实现正球差的相位补偿;相反,则实现负球差的相位补偿;球差补偿的大小与双自由曲面镜的相对平移量相关,具体为f=1/4Ad(n
所述双楔板垂直于光轴放置,且可各自绕光轴独立旋转实现像散的补偿,并能在x和y方向整体倾斜,实现慧差的补偿;
所述多轴运动台实现待测镜在x、y和z方向的平移以及x和z方向的旋转。
一种光学自由曲面子孔径拼接干涉测量方法,所述方法包括以下步骤:
步骤1,对待测镜进行全局测量子孔径划分;
步骤2,按划分好的子孔径依次进行测量,利用权重随机梯度下降算法获取各子孔径的稀疏干涉条纹图,实现子孔径补偿相位的自动调整;
步骤3,获取各子孔径的测量相位和补偿相位;
步骤4,对各子孔径的测量相位进行校正,并进行全局最小二乘拼接获得待测相位。
进一步地,步骤3所述获取各子孔径的测量相位和补偿相位,具体包括:
步骤3-1,对相位补偿后的第i个子孔径进行测量,得到该子孔径的相位数据S
步骤3-2,对当前第i个子孔径进行四次微平移错位测量,获得四个子测量子孔径相位数据S
设S
步骤3-3,利用S
利用最小二乘法求解下式中的x:
S=Mx,
式中,S为5次测量的子孔径数据,M为待测面Z
S=[S
M=[Z
x=[x
式中,x
基于系数x,求解第i个子孔径的补偿相位P(i):
式中,n为用于拟合每个子孔径补偿相位的Zernike项数;
步骤3-4,重复步骤3-1至3-3,直至获得所有子孔径的测量相位以及补偿相位。
进一步地,步骤4所述对各子孔径的测量相位进行校正,并进行全局最小二乘拼接获得待测相位,具体包括:
步骤4-1,利用每个子孔径的测量相位S
步骤4-2,对所有校正后的子孔径相位
进一步地,步骤4-2中进行全局最小二乘拼接时,子孔径拼接模式为:
全孔径覆盖测量拼接模式:测试光覆盖全口径待测镜,调整可变相位补偿器,使局部子孔径区域中出现稀疏条纹,不断改变条纹出现的局部子孔径位置,直至遍历完所有子孔径完成全口径待测镜的测量并进行最小二乘拼接处理,得到完整的待测相位;
或子孔径覆盖测量拼接模式:测试光只覆盖待测镜的一部分,通过不断调整可变相位补偿器和待测镜的状态,直至完成全口径待测镜的测量并进行最小二乘拼接处理,得到完整的待测相位;
或综合测量模式:首先利用全孔径覆盖测量拼接模式对待测镜进行全局测量,当其中某个区域无法出现稀疏条纹时,利用子孔径覆盖测量拼接模式,对该子区域进行单独测量,完成全口径待测镜的测量后,将全孔径覆盖测量拼接结果与子孔径覆盖测量结果进行拼接,得到完整的待测相位。
本发明与现有技术相比,其显著优点为:1)可变相位补偿器可以通过组件的横向平移、旋转和倾斜实现大动态范围的相位补偿,包括产生不同曲率半径的正球差和负球差的补偿相位,可实现鸥翼型复杂曲面的测量;2)通过对单个子孔径的多次微平移错位测量,可直接计算出补偿相位,无需增加额外的测量光路,有效降低系统的复杂度;3)可分别采用全孔径覆盖测量拼接、子孔径覆盖测量拼接以及子孔径综合测量拼接三种测量模式,实现柔性的、高精度的光学自由曲面干涉测量方案,具有非常好的应用前景。
下面结合附图对本发明作进一步详细描述。
附图说明
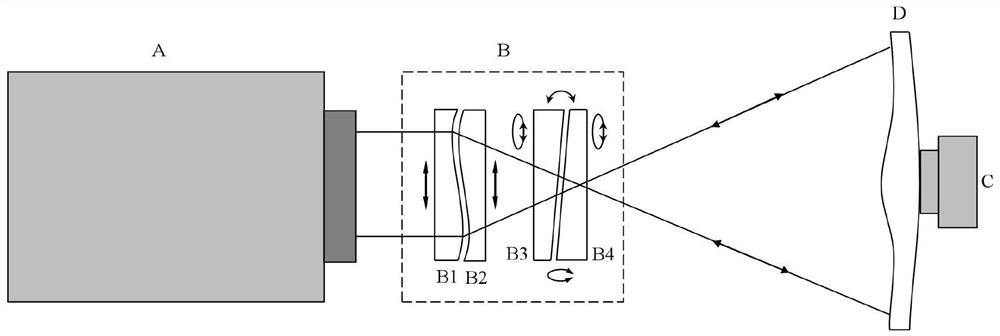
图1为一个实施例中光学自由曲面的子孔径拼接干涉测量装置示意图。
图2为一个实施例中子孔径补偿相位自动调整过程的干涉条纹图,其中图(a)、(b)、(c)和(d)分别为子孔径干涉图优化初始干涉图、可见条纹干涉图、稀疏条纹干涉图以及近零条纹干涉图。
图3为一个实施例中子孔径5次微平移错位测量的子孔径规划图。
图4为一个实施例中子孔径5次微平移错位测量的干涉条纹图,图(a)、(b)、(c)、(d)和(e)分别为5个子孔径S
图5为一个实施例中计算出的子孔径补偿相位结果图。
图6为一个实施例中子孔径最小二乘拼接后的待测相位结果图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
在一个实施例中,结合图1,提供了一种光学自由曲面子孔径拼接干涉测量装置,所述装置包括沿光轴依次设置的激光干涉仪A、可变相位补偿器B和待测镜D,其中待测镜D置于多轴运动台C上;这里待测镜可以是其他光学自由曲面。
所述激光干涉仪A,用于产生光学自由曲面干涉测量的测试光;
这里优选地,激光干涉仪A为泰曼-格林结构或斐索结构干涉仪。
所述可变相位补偿器B,用于补偿每个子孔径的波前相位,使每个子孔径获得稀疏的干涉条纹;
所述多轴运动台C,用于控制待测镜D的多轴运动。
进一步地,在其中一个实施例中,所述可变相位补偿器B包括沿光轴设置的双自由曲面镜(B1、B2)和双楔板(B3、B4);其中,所述双自由曲面镜(B1、B2)靠近激光干涉仪A,包括沿光轴依次设置的第一自由曲面镜B1和第二自由曲面镜B2;所述双楔板(B3、B4)包括沿光轴依次设置的第一楔板B3和第二楔板B4;
所述双自由曲面镜(B1、B2)为平面-自由曲面结构,自由曲面面形方程为:
z=A(xy
式中,z为光轴方向的坐标,且向右为正向;x为垂直于z轴且平行于纸面的坐标,且向上为正向;y为垂直于光轴且垂直于纸面的坐标,且垂直于纸面向外为正向;A、D、E均为自由曲面系数;
所述双自由曲面镜(B1、B2)垂直于光轴放置且两个自由曲面相对设置,初始状态为共轴心;若第一自由曲面镜B1由初始状态向x正向平移,第二自由曲面镜B2由初始状态向x负向平移,则实现正球差的相位补偿;相反,则实现负球差的相位补偿;球差补偿的大小与双自由曲面镜(B1、B2)的相对平移量相关,具体为f=1/4Ad(n
所述双楔板(B3、B4)垂直于光轴放置,且可各自绕光轴独立旋转实现像散的补偿,并能在x和y方向整体倾斜,实现慧差的补偿;
所述多轴运动台C实现待测镜D在x、y和z方向的平移以及x和z方向的旋转。
在一个实施例中,提供了一种光学自由曲面子孔径拼接干涉测量方法,所述方法包括以下步骤:
步骤1,对待测镜进行全局测量子孔径划分;
步骤2,按划分好的子孔径依次进行测量,利用权重随机梯度下降算法获取各子孔径的稀疏干涉条纹图,实现子孔径补偿相位的自动调整;
步骤3,获取各子孔径的测量相位和补偿相位;
步骤4,对各子孔径的测量相位进行校正,并进行全局最小二乘拼接获得待测相位。
进一步地,在其中一个实施例中,步骤2中所述利用权重随机梯度下降算法获得子孔径的稀疏干涉条纹图,实现补偿相位的自动调整,具体包括:
将可变相位补偿器B中的双自由曲面镜(B1、B2)的相对平移量δ、双楔板(B3、B4)中各楔板的旋转量α
进一步地,在其中一个实施例中,步骤3所述获取各子孔径的测量相位和补偿相位,具体包括:
步骤3-1,对相位补偿后的第i个子孔径进行测量,得到该子孔径的相位数据S
步骤3-2,对当前第i个子孔径进行四次微平移错位测量,获得四个子测量子孔径相位数据S
设S
步骤3-3,利用S
利用最小二乘法求解下式中的x:
S=Mx,
式中,S为5次测量的子孔径数据,M为待测面Z
S=[S
M=[Z
x=[x
式中,x
基于系数x,求解第i个子孔径的补偿相位P(i):
式中,n为用于拟合每个子孔径补偿相位的Zernike项数;
步骤3-4,重复步骤3-1至3-3,直至获得所有子孔径的测量相位以及补偿相位。
进一步地,在其中一个实施例中,步骤4所述对各子孔径的测量相位进行校正,并进行全局最小二乘拼接获得待测相位,具体包括:
步骤4-1,利用每个子孔径的测量相位S
步骤4-2,对所有校正后的子孔径相位
进一步地,在其中一个实施例中,步骤4-2中进行全局最小二乘拼接时,子孔径拼接模式为:
全孔径覆盖测量拼接模式:测试光覆盖全口径待测镜,调整可变相位补偿器,使局部子孔径区域中出现稀疏条纹,不断改变条纹出现的局部子孔径位置,直至遍历完所有子孔径完成全口径待测镜的测量并进行最小二乘拼接处理,得到完整的待测相位;
或子孔径覆盖测量拼接模式:测试光只覆盖待测镜的一部分,通过不断调整可变相位补偿器和待测镜的状态,直至完成全口径待测镜的测量并进行最小二乘拼接处理,得到完整的待测相位;
或综合测量模式:首先利用全孔径覆盖测量拼接模式对待测镜进行全局测量,当其中某个区域无法出现稀疏条纹时,利用子孔径覆盖测量拼接模式,对该子区域进行单独测量,完成全口径待测镜的测量后,将全孔径覆盖测量拼接结果与子孔径覆盖测量结果进行拼接,得到完整的待测相位。
示例性地,在其中一个实施例中,对本发明光学自由曲面的子孔径拼接干涉测量装置和方法进行进一步验证说明。本实例中,干涉仪采用泰曼-格林型激光干涉仪。可变相位补偿器中,自由曲面镜的自由曲面无量纲系数为:A=12,D=-4,E=0。自由曲面镜的制作材料为聚甲基丙烯酸甲酯(PMMA),口径为34mm,中心厚度为5mm。楔板的楔角为8°,口径为50.8mm,材料为K9玻璃。鸥翼型待测自由曲面,如图1放置在五维电控控制台上。
图2(a)为第i个子孔径测量未经调整相位补偿模块补偿时的干涉图,可以看到在子孔径的大部分区域的条纹均不可分辨,无法进行子孔径的相位测量。将可变相位补偿器(B)中的双自由曲面镜(B1、B2)的相对平移量δ、旋转楔板(B3、B4)的旋转量α
在第i个子孔径完成的自适应像差补偿后,对其进行多次测量,以获得子孔径的相位数据和补偿像差。每个子孔径的5次测量规划如图3所示,阴影部分为中心子孔径S
在完成所有子孔径的测量后,对子孔径数据应用全局最小二乘拼接技术,得到待测相位,如图6所示。可以看出,本发明能实现柔性的、复杂光学自由曲面(例如鸥翼型曲面)的高精度测量。
以上所述,仅是本发明的较佳实施例,并非对发明作任何形式上的限制,凡是依据本发明的技术实质上所作的任何简单修改、等同变化与修饰,仍均属于本发明技术方案的保护范围。
- 一种自由曲面非常规子孔径拼接干涉检测装置与方法
- 一种自由曲面非常规子孔径拼接干涉检测装置与方法