多柔体电器触簧系统的接触弹跳分析方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及一种描述电器弹跳行为的分析方法,具体涉及一种能够有效模拟电器触簧系统簧片弹跳特性的方法。
背景技术
对电器而言,接触不良、闭合触点频繁分离等现象极大程度地威胁着电力系统的安全稳定性。随着对电器可靠性要求的提升,对其接触性能也提出了更严格的要求。为规避接触故障,使电器具有更高的可靠性和更长的使用寿命,需要降低触点弹跳幅值和弹跳时间。
在一次短暂的宏观碰撞过程中,由于簧片结构的弹性振动与碰撞发生相互作用,很有可能会发生多次间歇性“接触-弹跳-再接触”的微接触弹跳现象。有研究表明,往复碰撞接触对系统强度的破坏程度往往高于单次高强度的碰撞。因而,含柔性部件的电器弹跳动力学研究对规避该类破坏问题具有十分重要的意义。然而由于刚柔耦合碰撞接触系统的方程包含强非线性项,数值性态非常复杂,使得该种情况下的接触弹跳动态分析及预测有着较大的困难。
目前电器的簧片在工作时会发生形变,传统以刚体为假设条件的接触系统动力学分析方法显然不能满足计算要求和分析精度。另外,由于传统的电器接触弹跳实验研究在结构设计上极其复杂且费时,并且不能清楚地揭示接触弹跳的机理。因此需要发明更简便实用和普适性更强的方法去实现含簧片结构的电器弹跳特性分析和行为抑制。
发明内容
本发明针对一类接触系统是由刚体和簧片结构构成的电器,提供了一种多柔体电器触簧系统的接触弹跳分析方法。该方法首先根据电器工作原理,将电器触簧系统的相互关系转化为不同性质的力学效应关系。之后依据欧拉-伯努利梁理论,通过构建触簧系统的运动与碰撞动力学模型,分析接触前后簧片的受力情况,以此明确簧片接触弹跳的评价方法。基于刚柔耦合机理,该方法能够对触簧系统的大范围刚体运动、小范围弹性变形和触簧系统存在的接触碰撞间的相互作用进行参数计算。通过引入接触约束,该方法将刚柔耦合动力学与碰撞相结合,能够模拟各工况对应的电器动态接触过程和接触弹跳行为。本发明的方法以简单有效的方式模拟簧片的动态过程并收集接触弹跳参数,对提高电器的接触可靠性和弹跳特性是十分必要的,与传统以刚体为假设条件的接触系统动力学分析方法相比,具有更好的计算精度。
本发明的目的是通过以下技术方案实现的:
一种多柔体电器触簧系统的接触弹跳分析方法,考虑簧片结构的刚体运动、柔性变形与碰撞效应,建立电器触簧系统的运动与碰撞动力学模型;推导电器动作过程中动簧片运动与碰撞动力学微分方程;明确触簧系统动簧片横向位移和梁结构的自由振动方程;给出电器动力学方程矩阵形式,形成一套能分析柔性簧片运动及接触全过程的弹跳计算方法。包括如下步骤:
步骤一、建立电器触簧系统的等效碰撞动力学模型;
步骤二、依据欧拉-伯努利梁理论,构建如下继电器运动学与碰撞动力学微分方程:
式中,ρ为动簧片的密度,A为动簧片横截面面积,E和I分别为动簧片的弹性模量和惯性矩,δ(x)是狄拉克δ-函数,x
其中:
式中,l
式中,y
式中:n表示碰撞指数,y
步骤三、建立继电器的动簧片位移方程:
式中,g
步骤四、完成继电器的动力学方程的矩阵形式:
式中,g=[g
步骤五、基于4阶Runge-Kutta法求解继电器的动力学方程的矩阵形式得到广义坐标g的数值解,之后代入下式得到动簧片的横向位移:
式中,g
步骤六、通过求解不同条件下动簧片横向位移随时间的变化规律曲线,分析电器触簧系统的动力学及碰撞弹跳特性。
相比于现有技术,本发明具有如下优点:
1、本发明提出的簧片弹跳特性分析方法区别于传统的刚体接触弹跳分析方法,在考虑结构刚体运动、弹性变形和碰撞效应相耦合作用的情况下,能够更加真实和准确的模拟电器接触弹跳行为。
2、本发明通过明确和求解电器结构的动力学方程的矩阵形式,以一种简便且公式化的方式协助电器设计者模拟结构的动作过程。
3、基于本发明的方法,通过更改电器的相关参数,可以完成不同参数下的电器动态特性分析,对规避剧烈的弹跳行为和设计参数组合具有重要意义。
4、利用本发明可以分析电路瞬间出现的过电压或者过电流对其开关特性的影响。
5、本发明明晰了电器接触弹跳的物理机理,为电器弹跳抑制分析奠定了方法基础。
6、本发明的发明方法能满足设计人员、工程师对多柔体电器触簧系统的接触弹跳进行准确评估的需求。通过参数计算,帮助设计人员和工程师明晰对应参数下的弹跳行为,并及时规避使电器弹行为变化剧烈的参数组合。
附图说明
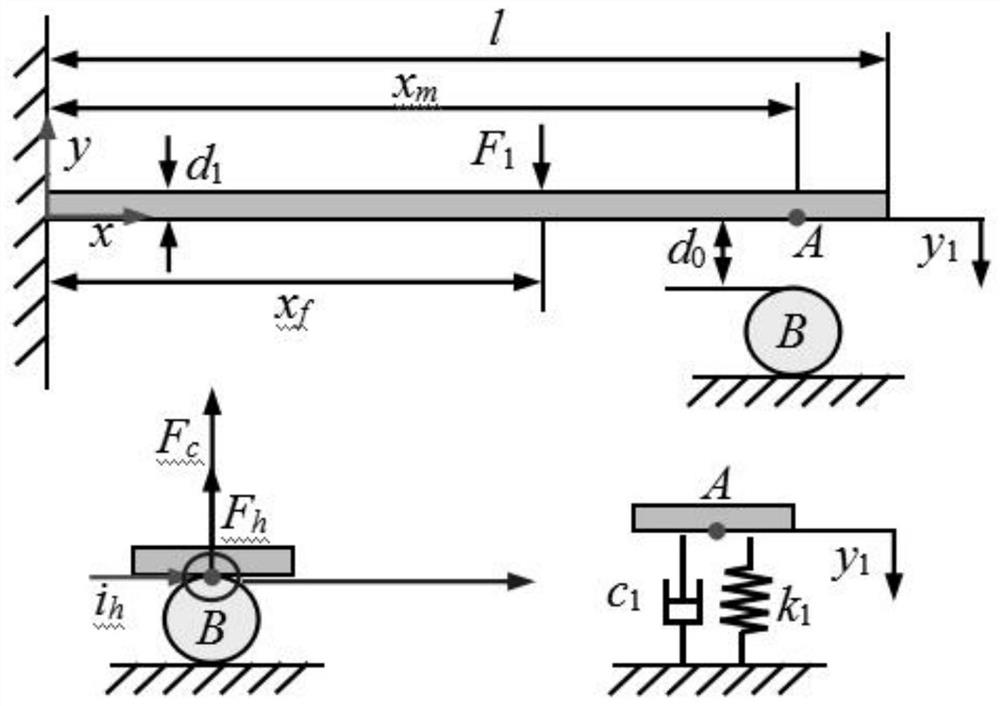
图1为电器触簧系统的碰撞动力学模型;
图2为衔铁及连杆受力分析;
图3为线圈电流随时间变化曲线;
图4为动簧片的动态特性曲线;
图5为某型号继电器的总体结构图,1轭铁;2-铁芯;3-反簧;4-连杆;5-动簧片;6-引出杆;7-线圈;8-衔铁;9-常闭触点;10-常开触点;11-底座;
图6为连杆推力作用位置改变时的簧片弹跳情况;
图7为不同接触间隙下的簧片弹跳情况。
具体实施方式
下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。
本发明提供了一种多柔体电器触簧系统的接触弹跳分析方法,所述方法是一种通过模拟电器触簧系统的刚体运动、柔性变形及接触碰撞间的相互作用,来计算和评价电器簧片弹跳行为的方法。该方法针对多柔体的电器触簧系统建立了其等效碰撞动力学模型,考虑了柔性结构在动作过程中大范围刚体运动、小范围弹性变形和非线性的碰撞接触效应;基于简单柔性梁理论,给出了簧片结构的运动与碰撞动力学微分方程;依据Galerkin法,本发明明确了动簧片的横向位移和梁结构的自由振动方程;基于4阶Runge-Kutta法编程求解可动簧片的动力学方程矩阵形式,以此计算电器触簧系统的动态特性、模拟簧片与常开触点间的接触过程、分析簧片的接触弹跳行为。具体包括如下步骤:
1、触簧系统的碰撞动力学模型等效
首先将动簧片等效为悬臂梁结构,电磁结构对接触系统的作用可以简化为一集中电磁力。此外,动簧片与常开触点对间的接触过程可视为接触力元的作用过程。当发生接触时,在接触域内增加接触力元,并利用阻尼系数衡量碰撞接触全过程的能量损失。当电流流经闭合动簧片时,短时间内的剧烈脉冲作用产生的Holm力倾向于使动簧片从常开触点侧斥开。通过引入一组约束条件,对这种瞬时斥力作用进行描述。
图1给出了电器触簧系统的碰撞动力学等效模型。图1中A为接触点,B为常开触点,F
2、运动学与碰撞动力学微分方程
对于1中建立的触簧系统碰撞动力学模型满足以下假设条件:1)动簧片为简单柔性梁,在整个长度范围内的截面保持不变,而且满足线性应力应变定理;2)动簧片的长度远大于截面高度,可以忽略剪切变形以及截面绕中性轴转动惯量的影响,因此可将其等效为欧拉-伯努利梁对继电器的接触系统进行动力学分析。因此动簧片的运动微分方程可以表示为:
式中,ρ为动簧片的密度,A为动簧片横截面面积,E和I分别为动簧片的弹性模量和惯性矩,δ(x)是狄拉克δ-函数。
继电器簧片被等效为悬臂梁结构,那么其固定端的挠度与转角等于零,且其自由端的弯矩与剪力等于零,边界条件可以表示为:
y|
y″|
继电器的电磁力矩T
式中:ψ为线圈电流产生的磁链,u为线圈电压,i为线圈电流,R为线圈电阻,ω为衔铁角速度,T
为求连杆对动簧片的推力F
2F
其中,l
当电流流经闭合动簧片时,可以看作是一种瞬时脉冲作用。为了能使动簧片的运动接触全过程的求解连续,本发明提出一种分段函数表示方法,将Holm力对动簧片的作用描述为以下函数形式:
通过引入接触桥模型来计算F
(1)所有导电斑点都集中在中心上,形成一个较大的导电斑点;
(2)接触面上的导电点是超导圆柱体,该超导圆柱体具有与触点相同的材料特性。
基于以上假设条件,动簧片和常开触点间的Holm力F
其中,μ为磁导率,a
其中,P表示接触力,ξ是接触表面的接触系数,H是接触材料的布氏硬度。基于式(7)和(8),可以得到Holm力F
触点间的非线性接触力F
式中:n表示碰撞指数,δ
式中:Δ=(d
综上,继电器动簧片微分运动方程式(1)中的连杆推力F
3、动簧片的位移特性
要分析继电器接触系统的动力学以及碰撞弹跳特性,需要将式(1)中的偏微分方程离散为常微分方程。因此,由Galerkin法,动簧片的横向位移可假设为:
式中,g
由分离变量法假设
φ(x)=C
其中,β
将振型函数(14)代入边界条件(2)中,可得如下方程:
方程(15)有非零解的条件为:
展开化简后可得频率方程:
cos(βl)ch(βl)+1=0 (17)。
通过求解上式,可以获得各阶的β
将悬臂梁的位移表达式(12)代入到运动微分方程(1)中,可得:
4、动力学方程的矩阵形式
基于主振型的正交性,式(18)的左右两端分别乘以
式中,g=[g
基于4阶Runge-Kutta法编程求解式(19)可得到广义坐标g的数值解,之后代入式(12)即可得到动簧片的位移。通过求解不同条件下动簧片位移随时间的变化规律曲线可以分析电器触簧系统的动力学及碰撞弹跳特性。
实施例:
1、计算实力
以某型号继电器为例(图5),利用本发明的方法对其进行动作过程模拟和弹跳特性分析。继电器相关参数为:u=27V,R=1560Ω,E=1.08×10
2、计算过程
(1)基于步骤1完成继电器触簧系统的碰撞动力学模型等效;
(2)根据步骤2推导继电器运动学与碰撞动力学微分方程;
(3)利用步骤3建立继电器的动簧片位移方程;
(4)依据步骤4完成继电器的动力学方程的矩阵形式;
(5)基于4阶Runge-Kutta法求解式(4)中继电器的动力学方程的矩阵形式。其中,计算得到的连杆推力作用位置改变时的簧片弹跳情况如图6所示,不同接触间隙下的簧片弹跳情况如图7所示。
3、计算收益
(1)利用本发明的方法能快速分析出簧片与常开触点间的接触分离情况随连杆推动点与接触点距离的缩短而减弱,增强了动簧片的稳定接触性能。
(2)基于本发明的方法能够知道,适当减小接触间隙可以有效抑制簧片和常开触点间的接触分离情况,有效提升继电器接触性能。
4、实验验证:
本发明通过对上述型号继电器的线圈电流曲线(图3)和主回路电参数曲线(图4)进行测量,验证了本发明的准确性。
- 多柔体电器触簧系统的接触弹跳分析方法
- 多柔体电器触簧系统的接触弹跳分析方法