一种涵道飞行器舵面控制机构
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及涵道飞行器领域,尤其涉及一种涵道飞行器舵面控制机构。
背景技术
随着空中交通的高速发展,飞行器的设计技术日益成熟,目前已提出多种飞行器布局形式。涵道飞行器是其中的典型布局形式之一,由于涵道飞行器不具有可以调整姿态的机翼,飞行状态不够稳定。因此,为了控制涵道飞行器的空中姿态,人们提出各种形式的舵面控制机构。
现在常用的舵面控制机构采用柔性铰链连接控制舵面,此类系统复杂繁琐、寿命短、控制效率低下,难于适用于需要长时间工作的涵道飞行器,更难以用于需要精确控制的涵道飞行器。
因此,有必要设计一种结构简单、重量小、易装配、制造成本低、寿命长且可靠性高的舵面控制机构,以便于民用、商用涵道飞行器的应用。
发明内容
本发明的目的在于提供一种简单可靠寿命长,制造成本低且便于民用和商用的涵道飞行器舵面控制机构。
为解决上述技术问题,本发明采用如下技术方案:
本发明一种涵道飞行器舵面控制机构,包括
位于中心的舵机安装支架;所述舵机安装支架在水平方向上具有相邻间隔90°的四个安装位;
分别设置在所述舵机安装支架的四个安装位上的四组舵面安装支架;
分别设置在四组所述舵面安装支架上的四组舵面;所述舵面包括第一副舵面、主舵面和第二副舵面;所述主舵面通过舵机驱动,所述第一副舵面和第二副舵面与主舵面联动。
进一步的,所述舵面安装支架包括中心框架、安装接头和周边框架;所述中心框架设置在所述舵机安装支架的安装位上,所述周边框架通过安装接头固定在中心框架上,周边框架与中心框架相对,且所述舵面位于周边框架与中心框架之间。
再进一步的,所述第一副舵面和第二副舵面分别位于所述主舵面两侧。
再进一步的,所述第一副舵面通过第一连杆与所述主舵面传动。
再进一步的,所述第一连杆包括第一连杆主体、第一套筒、第一球头、第二套筒和第二球头;所述第一连杆主体的两端分别通过第一套筒和第二套筒与第一球头和第二球头相连,所述第一球头和第二球头分别固定在第一副舵面和主舵面上。
再进一步的,所述第二副舵面通过第二连杆与所述主舵面传动。
再进一步的,所述第二连杆包括第二连杆主体、第三套筒、第三球头、第四套筒和第四球头;所述第二连杆主体的两端分别通过第三套筒和第四套筒与第三球头和第四球头相连,所述第三球头和第四球头分别固定在第二副舵面和主舵面上。
与现有技术相比,本发明的有益技术效果如下:
本发明涵道飞行器舵面控制机构包括四组控制单元,每组控制单元包括三个控制舵面;舵面控制机构工作时,主舵面在舵机的驱动下绕其安装轴线旋转,两个副舵面在相应连杆的作用下跟随主舵面作相似的旋转运动;所述四组控制单元可以独立运行,从而实现对涵道飞行器姿态的实时控制。
上述由四组控制单元组成的涵道飞行器舵面控制机构安全可靠,同时结构简单,安装便捷,制造成本低,使用寿命长,便于民用和商用。
附图说明
下面结合附图说明对本发明作进一步说明。
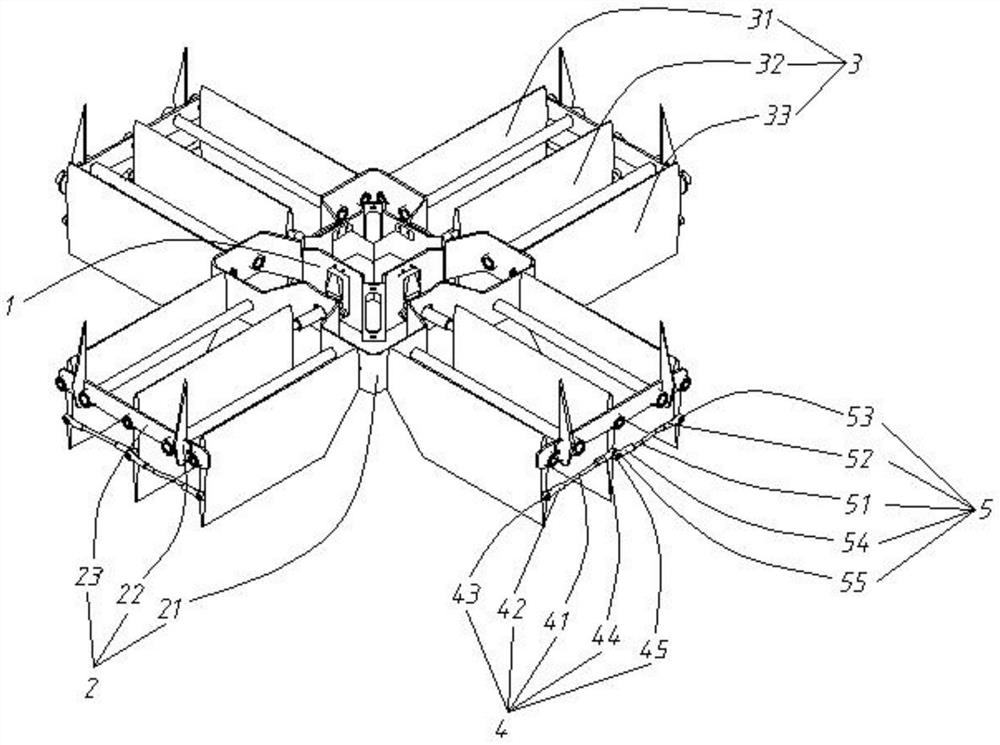
图1是本发明涵道飞行器舵面控制机构其中一种具体实施例的结构示意图;
附图标记说明:1、舵机安装支架;
2、舵面安装支架;21、中心框架;22、安装接头;23、周边框架;
3、舵面;31、第一副舵面;32、主舵面;33、第二副舵面;
4、第一连杆;41、第一连杆主体;42、第一套筒;43、第一球头;44、第二套筒;45、第二球头;
5、第二连杆;51、第二连杆主体;52、第三套筒;53、第三球头;54、第四套筒;55、第四球头。
具体实施方式
下面结合附图以及具体实施方式进一步说明本发明。
如图1所示,本发明提供一种涵道飞行器舵面控制机构的其中一种具体实施例,包括位于中心的舵机安装支架1,所述舵机安装支架1在水平方向上具有相邻间隔90°的四个安装位,即四个安装位在360°上均匀分布。每个安装位上安装有一组舵面安装支架2,所述舵面安装支架2包括中心框架21、安装接头22和周边框架23。所述中心框架21固定安装在所述舵机安装支架2的安装位上,所述周边框架23通过安装接头22固定在中心框架21上,周边框架23与中心框架21相对,使周边框架23与中心框架21之间具有间距。在周边框架23与中心框架21之间可摆动地安装所述舵面3,所述舵面3包括第一副舵面31、主舵面32和第二副舵面33。第一副舵面31、主舵面32和第二副舵面33均通过旋转轴安装在周边框架23与中心框架21之间,其旋转轴线应尽可能接近舵面气动中心,以减轻舵机的工作强度。所述主舵面32通过舵机驱动,所述第一副舵面31和第二副舵面33分别位于所述主舵面32两侧,第一副舵面31通过第一连杆4与主舵面32联动,第二副舵面33通过第二连杆5与主舵面32联动。
所述第一连杆4包括第一连杆主体41、第一套筒42、第一球头43、第二套筒44和第二球头45。所述第一连杆主体41的两端分别通过第一套筒42和第二套筒44与第一球头43和第二球头45相连,所述第一球头43和第二球头45分别固定在第一副舵面31和主舵面32上,形成第一连杆主体41和第一副舵面与主舵面的铰接,当主舵面摆动时,第一副舵面也同步摆动。
所述第二连杆5包括第二连杆主体51、第三套筒52、第三球头53、第四套筒54和第四球头55;所述第二连杆主体51的两端分别通过第三套筒52和第四套筒54与第三球头53和第四球头55相连,所述第三球头53和第四球头55分别固定在第二副舵面33和主舵面32上,形成第二连杆主体51和第二副舵面与主舵面的铰接,当主舵面摆动时,第二副舵面也同步摆动。
当需要通过调整舵面位置时,主舵面32在舵机的驱动下绕安装旋转轴的轴线作旋转运动,通过第一连杆4和第二连杆5的连接,第一副舵面31与第二副舵面32同时绕其安装旋转轴的轴线转动,从而实现一组舵面单元的联合运动;通过协调四个舵面单元的控制,即可实现对涵道飞行器的姿态控制。
本具体实施方式中,舵面安装支架由中心支架、安装接头和周边框架三部分组成,结构简单、便于安装,当然,不限于此,采用其它结构也可以。
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。