一种建筑墙面浆料自动喷涂系统及自动喷涂方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明主要涉及建筑施工技术领域,具体涉及一种建筑墙面浆料自动喷涂系统及自动喷涂方法。
背景技术
建筑物表面的浆料(如水泥砂浆、灰浆、腻子粉、漆料、硅藻泥等等)涂抹覆盖工序是建筑领域中的一个重要的施工项目,主要是通过对建筑物的墙体表面进行浆料的涂抹以达到改善建筑物室内环境或者提高建筑物的隔热、防潮和防风化等建筑性能的目的。传统的浆料涂抹覆盖工序主要是由人工手握专用工具(如喷射浆料的喷枪)将浆料涂抹在坯墙表面,其工作量大、工作效率低、劳动强度高、施工质量(如墙面平整度等)难以得到保证;对于墙面上方部位,需要搭设脚手架等平台,人工在高位平台上施工,存在跌落等安全风险。本专利申请人在实现本发明的过程中,提出过对应的自动喷涂机器人系统,但是在其使用过程中,整个机器人系统仍然需要人工进行定位,从而使得整个系统无法实现全自动化,其喷涂效率以及喷涂精度均无法有效保证。
发明内容
本发明要解决的技术问题就在于:针对现有技术存在的问题,本发明提供一种全自动化、施工效率以及施工质量高的建筑墙面浆料自动喷涂系统及自动喷涂方法。
为解决上述技术问题,本发明提出的技术方案为:
一种建筑墙面浆料自动喷涂系统,包括运动机构和喷涂机构;
所述运动机构包括滑动小车、升降导轨和升降驱动件,所述升降导轨安装于所述滑动小车上;
所述喷涂机构,安装于所述升降导轨上并在所述升降驱动件的驱动下沿所述升降导轨上下升降,用于向待喷涂墙面喷涂浆料;
所述滑动小车的底部安装有多个高度可调节的支撑单元;
所述滑动小车上安装有水平度检测单元,用于检测所述滑动小车的水平度,以分别调整各支撑单元的支撑高度来保证滑动小车处于水平面上。
作为上述技术方案的进一步改进:
所述水平度检测单元包括两个角度传感器,其中一个角度传感器用于测量滑动小车在x方向与水平面之间的夹角,另一个角度传感器用于测量滑动小车在y方向上与水平面之间的夹角,其中x方向与y方向相互垂直。
所述支撑单元包括支撑腿和支撑伺服电机,所述支撑伺服电机与所述支撑腿相连,用于调节所述支撑腿的支撑高度。
所述支撑腿的底部安装有压力检测件,用于检测所述支撑腿的支撑压力。
所述喷涂机构包括喷枪、安装组件和角度检测单元,所述安装组件安装于所述升降导轨上,所述喷枪转动安装于所述安装组件上;所述角度检测单元用于检测所述喷枪的喷涂面与成墙理论面之间的夹角,以调整所述喷枪的转动角度来保证喷枪的喷涂面与成墙理论面相互平行。
所述角度检测单元包括位于所述升降导轨两侧的伸缩杆,各所述伸缩杆的顶端均设置有距离检测件,用于检测其与成墙理论面之间的距离以换算得到喷枪的喷涂面与成墙理论面之间的夹角。
各所述伸缩杆的顶端设置有定位点;所述安装座上设置有视觉检测单元,用于检测其与各伸缩杆上的定位点的距离以得到喷枪的喷涂面与成墙理论面之间的夹角。
还包括浆料厚度检测机构,用于检测墙面上浆料的厚度,以调整所述喷涂机构的喷涂作业来保证墙面喷涂浆料的平整性。
本发明还公开了一种基于如上所述的建筑墙面浆料自动喷涂系统的自动喷涂方法,包括步骤:
1)所述滑动小车上的水平度检测单元检测所述滑动小车在水平方向上的水平度参数;
2)根据所述水平度参数,分别调整各支撑单元的支撑高度来保证滑动小车处于水平面上。
作为上述技术方案的进一步改进:
在步骤2)之后,还包括:
3)检测所述喷枪的喷涂面与成墙理论面之间的夹角;
4)调整所述喷枪的转动角度,使喷枪的喷涂面与成墙理论面相互平行。
与现有技术相比,本发明的优点在于:
本发明的建筑墙面浆料自动喷涂系统,通过运动机构的滑动小车,从而快速移动至对应位置,提高操作的简便性和快速性;通过喷枪在升降导轨上的升降运动、在水平导轨上水平运动以及自身角度的调整,可以实现对大区域毛坯墙面的喷涂,其整体喷涂效率高且易于实现;其中滑动小车的水平度调整通过水平度检测单元和支撑单元的配合来全自动化完成,喷枪的喷涂角度也是通过角度检测单元和水平伺服电机的配合来全自动化完成;在进行喷涂的过程中,通过浆料厚度检测机构检测浆料厚度,再根据浆料厚度控制喷涂机构的喷涂作业(如开启或关闭)来保证墙面喷涂浆料的平整性;相对于人工的方式,上述自动喷涂系统无需人工参与,其整体自动化程度极高,施工效率高、施工质量高、人工成本低且安全可靠。
附图说明
图1为本发明的自动喷涂系统在具体应用时的立体结构示意图之一。
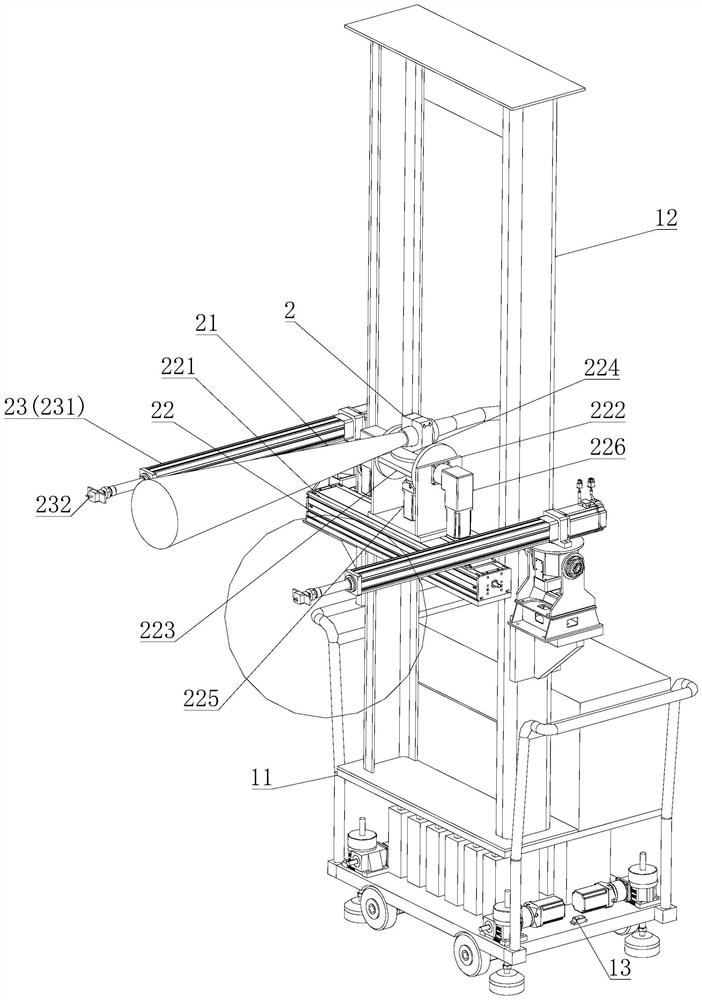
图2为本发明的自动喷涂系统在具体应用时的立体结构示意图之二。
图3为图2的局部放大图。
图4为本发明中的滑动小车在实施例的立体结构示意图。
图5为本发明中的滑动小车在实施例的主视结构示意图。
图6为本发明中的滑动小车在实施例的侧视结构示意图。
图7为本发明中的滑动小车在实施例的仰视结构示意图。
图例说明:1、运动机构;11、滑动小车;111、支撑单元;1111、支撑腿;1112、支撑伺服电机;112、压力检测件;12、升降导轨;13、水平度检测单元;131、角度传感器;2、喷涂机构;21、喷枪;22、安装组件;221、水平滑轨;222、支架;223、转动座;224、安装座;225、水平伺服电机;226、转动伺服电机;23、角度检测单元;231、伸缩杆;232、距离检测件。
具体实施方式
以下结合说明书附图和具体实施例对本发明作进一步描述。
如图1所示,本实施例的建筑墙面浆料自动喷涂系统,包括运动机构1和喷涂机构2;运动机构1包括滑动小车11、升降导轨12和升降驱动件,升降导轨12安装于滑动小车11上;喷涂机构2,安装于升降导轨12上并在升降驱动件的驱动下沿升降导轨12上下升降,用于向待喷涂墙面喷涂浆料;上述喷涂机构2在较大范围内的升降运动,从而实现向较大范围内待喷涂墙面喷涂浆料(如水泥砂浆、灰浆、腻子粉、漆料、硅藻泥等等);滑动小车11的底部安装有多个高度可自动调节的支撑单元111;滑动小车11上安装有水平度检测单元13,用于检测滑动小车11的水平度,以分别调整各支撑单元111的支撑高度来保证滑动小车11处于水平面上。
为了保证喷涂作业的精度以及可靠性,需要保证喷枪21以及升降导轨12等位于一垂直平面内,从而便于对其位置进行精准调节以保证喷涂的精度。由于上述升降导轨12等均是位于滑动小车11上,故先需要保证滑动小车11在喷涂作业时是处于水平状态的,而在施工现场,地面通常是坑洼不平的,故要求上述滑动小车11能够实现水平度的自动检测以及自动调节。在本实施例中,则采用水平度检测单元13检测滑动小车11的水平度,再通过分别自动调节滑动小车11底部安装的支撑单元111的高度,从而实现滑动小车11水平度的调整;上述水平度检测及调整的方式全部自动化完成,无需人工参与,不仅水平度调整效率高、水平度调整精度高,而且使得整体喷涂系统的自动化程度高。
在一具体实施例中,如图1和图4所示,水平度检测单元13包括两个角度传感器131,其中一个角度传感器131用于测量滑动小车11在x方向(如滑动小车11横向方向)与水平面之间的夹角,另一个角度传感器131用于测量滑动小车11在y方向(如滑动小车11纵向方向)上与水平面之间的夹角,其中x方向与y方向相互垂直。通过上述两个角度传感器131检测滑动小车11的整体表面在x方向和y方向与水平面之间的夹角,从而得到滑动小车11的水平度。上述水平度检测单元13的整体结构简单、操作简便、易于实现且成本低。
在一具体实施例中,如图4~7所示,其中支撑单元111则包括支撑腿1111和支撑伺服电机1112,支撑伺服电机1112通过传动机构与支撑腿1111相连,用于调节支撑腿1111的支撑高度。通过控制支撑伺服电机1112的动作,再通过传动机构实现对支撑腿1111的高低调节,其调节方式简便且调节精度高。另外,在支撑腿1111的底部均安装有压力检测件112,用于检测支撑腿1111的支撑压力。在具体工作时,通过扶手推动滑动小车11到达待喷涂墙面的正前方,此时将各支撑腿1111伸起以架起滑动小车11而使其不再移动。由于后续需要对滑动小车11的水平度进行检测以及调整,故需要对支撑腿1111的初始位置进行标定,从而保证后续水平度调整的可靠性,而如果直接采用将支撑腿1111伸长预定高度的方式进行初始位置的标定,在地面坑洼不平的场景下,在某个支撑腿1111伸长预定高度后仍然可能无法接触到地面,从而会影响后续水平度的调整。故在支撑腿1111的底部安装有压力检测件112(如压力传感器),在各支撑腿1111上的压力传感器均检测到预设压力时,则可以判断各支撑腿1111均已接触到地面,此时则可以认定各支撑腿1111的位置为水平度调整的初始位置,然后通过水平度检测单元13检测滑动小车11的水平度,再通过调节各支撑伺服电机1112,实现各支撑腿1111高度的调整,最终保证滑动小车11处于水平状态。上述通过调节支撑腿1111的高度以实现对滑动小车11水平度的调整,其整体结构简单、调节简便、精度高且自动化程度高;通过各支撑腿1111上的压力检测件112检测压力来判定其水平度调整的初始位置,保证后续水平度调整的精度以及可靠性。
另外,滑动小车11的底部安装有滑轮;滑动小车11的两侧设置有扶手,其整体结构简单、移动方便,有利于提高整体的施工效率。
在一具体实施例中,如图2所示,喷涂机构2包括喷枪21、安装组件22、角度检测单元23和浆料储存罐(图中未示出),喷枪21通过管道与浆料储存罐相连;其中浆料存储罐位于地面上,通过管道与喷枪21相连,喷枪21可以实现对浆料喷涂的开始、停止、浆料的流量、喷涂时间等进行控制,从而实现后续对墙面平整性的精准控制;其中安装座224安装于升降导轨12上,喷枪21转动安装于安装座224上;角度检测单元23用于检测喷枪21的喷涂面与成墙理论面之间的夹角,以调整喷枪21的转动角度来保证喷枪21的喷涂面与成墙理论面相互平行。其中成墙理论面可以通过激光器发射激光来形成。
在调整滑动小车11的水平度后,从而可以保证滑动小车11上的升降导轨12也是处于一竖直平面内的,从而保证升降导轨12上的喷枪21也是在竖直平面内运动而进行喷涂的。但是上述升降导轨12所处的竖直平面可能与成墙理论面之间不是相互平行的,从而使得喷枪21不是正对于成墙理论面的。故针对此技术问题,本实施例中通过角度检测单元23检测喷枪21的喷涂面与成墙理论面之间的夹角,再通过自动调整喷枪21的转动角度来保证喷枪21的喷涂面与成墙理论面相互平行(即喷枪21是正对于成墙理论面的),从而保证喷涂的精度和可靠性。
在一具体实施例中,如图2所示,角度检测单元23包括位于升降导轨12两侧的伸缩杆231(如电缸),各伸缩杆231的顶端均设置有距离检测件232(如激光接收器),用于检测其与成墙理论面之间的距离以换算得到喷枪21的喷涂面与成墙理论面之间的夹角。具体地,上述电缸均是处于初始位置(即未伸长的状态)的,其顶端的激光接收器可以检测到成墙理论面上激光的距离,然后再结合两激光接收器之间的距离,从而可以得到两激光接收器之间连线所在的竖直平面与成墙理论面之间的夹角,也即得到喷枪21与成墙理论面之间的偏差角度。上述激光接收器检测方式简单可靠。
另外,上述伸缩杆231(电缸)的固定端是铰接于升降导轨12的两侧,在不需要进行角度的检测时,则将上述伸缩杆231向上转动而与升降导轨12的两侧平齐,从而便于搬运或移动。
作为上述实施例的进一步补充,在得到上述喷枪21的偏差角度后,再通过调整各电缸的伸缩长度以使各激光接收器均位于成墙理论面内,其中各电缸的伸缩长度均是可以通过电缸来获取得到的,从而再通过两电缸的移动距离以及两电缸之间的距离,再次换算得到喷枪21的偏差角度,从而对上述偏差角度进行再度校验,保证后续喷枪21偏差角度调整的精度。
在其它实施例中,也可以在各电缸的顶端设置有定位点(常规的凸点即行,图中未示出),同时在安装组件22上设置视觉检测单元(如3D相机等,图中未示出),用于检测其与各伸缩杆231上的定位点的距离以得到喷枪21的喷涂面与成墙理论面之间的夹角。具体地,在各电缸处于初始位置的情况下,然后调整其中一个电缸的伸缩长度以使其定位点位于成墙理论面内,然后通过视觉检测单元检测初始位置和调整后位置的定位点的距离,最终也得到喷枪21偏差角度,实现其再度的校验。
在一具体实施例中,安装组件22包括水平滑轨221、转动座223和安装座224,水平滑轨221的两端分别位于升降导轨12上,可以在升降导轨12上滑动;转动座223安装于水平滑轨221上并可沿水平滑轨221水平滑动;安装座224转动安装于转动座223上并可在垂直平面内转动,喷枪21安装于安装座224上且通过水平伺服电机225在水平面上转动;另外转动座223也是通过转轴转动安装于水平滑轨221上的支架222上,通过支架222两侧的转动伺服电机226实现安装座224上喷枪21的上下俯仰运动,从而实现浆料喷涂方向的调整。具体在,如在对阴角等部位进行喷涂时,由于运动机构1的位置限制,喷枪21无法到达阴角等位置,此时则可以通过调整喷枪21的喷射角度,实现对上述特殊区域的喷涂。
在上述得到喷枪21的偏差角度后,然后再通过水平伺服电机225来控制喷枪21的水平旋转角度,以使喷枪21正对于成墙理论面,保证喷涂的安全可靠性;上述通过水平伺服电机225来实现喷枪21偏差角度的调整,其调整简便可靠,易于实现。
在一具体实施例中,还包括浆料厚度检测机构(图中未示出),用于检测墙面上喷涂浆料的厚度,以调整喷涂机构2的喷涂作业(如开启或关闭)来保证墙面喷涂浆料的平整性,如达到浆料厚度则停止喷涂机构2的喷涂。其中浆料厚度检测机构包括超声波传感器,位于喷枪21的上方或者安装组件22上,用于检测墙面与成墙理论面之间距离,在检测到喷涂后的墙面与成墙理论面重合时,则判断喷涂完成。当然,上述超声波传感器也可以采用激光传感器或距离传感器或视觉检测系统(如3D工业相机构建喷涂模型)来代替,数量根据实际情况进行选择。
本发明的建筑墙面浆料自动喷涂系统,通过运动机构1的滑动小车11,从而快速移动至对应位置,提高操作的简便性和快速性;通过喷枪21在升降导轨12上的升降运动、在水平导轨上水平运动以及自身角度的调整,可以实现对大区域毛坯墙面的喷涂,其整体喷涂效率高且易于实现;其中滑动小车11的水平度调整通过水平度检测单元13和支撑单元111的配合来全自动化完成,喷枪21的喷涂角度也是通过角度检测单元23和水平伺服电机225的配合来全自动化完成;在进行喷涂的过程中,通过浆料厚度检测机构检测浆料厚度,再根据浆料厚度控制喷涂机构2的喷涂作业(如开启或关闭)来保证墙面喷涂浆料的平整性;相对于人工的方式,上述自动喷涂系统无需人工参与,其整体自动化程度极高,、施工效率高、施工质量高、人工成本低且安全可靠。
如图6所示,本发明还公开了一种基于如上所述的建筑墙面浆料自动喷涂系统的自动喷涂方法,包括步骤:
1)滑动小车11上的水平度检测单元13检测滑动小车11在水平方向上的水平度参数;
2)根据水平度参数,分别调整各支撑单元111的支撑高度来保证滑动小车11处于水平面上,从而使得滑动小车11上的升降导轨12所处平面位于竖直平面内,从而便于后续喷涂的精准可靠性;
3)检测喷枪21的喷涂面与成墙理论面之间的夹角;
4)调整喷枪21的转动角度,使喷枪21的喷涂面与成墙理论面相互平行,同样保证后续喷涂的精准可靠性。
在一具体实施例中,在步骤1)中,将滑动小车11推行至待喷涂墙面的前方,此时将各支撑腿1111伸起以架起滑动小车11而使其不再移动;由于施工现场地面的不平整性,在各支撑腿1111伸起后,需要保证其与地面是接触的,故需要检测其接触压力来进行判断,具体通过各支撑腿1111上的压力传感器检测各压力均到达预设压力时,则可以判断各支撑腿1111均已接触到地面,此时则可以认定各支撑腿1111的位置为水平度调整的初始位置;然后再通过水平度检测单元13检测滑动小车11在水平方向上的水平度参数,具体是检测滑动小车11所处平面与水平面在两个垂直方向上的夹角。
在一具体实施例中,在步骤2)中,通过调节支撑单元111中的各支撑伺服电机1112,实现各支撑腿1111高度的调整,最终保证滑动小车11处于水平状态。其具体调整过程如上的喷涂系统所述,在此不再赘述。
在一具体实施例中,在步骤3)中,具体通过升降导轨12两侧的电缸上的激光接收器来检测对应的距离来得到喷枪21的偏差角度,具体检测过程参见如上的喷涂系统所述,在此不再赘述。
在一具体实施例中,升降驱动件的升降运动和水平导轨的水平运动,使得喷涂机构2在平行于成墙理论面的工作面内运动,同时喷涂机构2在运动的过程中向毛坯墙喷涂浆料。在喷涂浆料的过程中,浆料厚度检测机构通过检测其运动面与墙面之间的距离,换算得到浆料的厚度,最终得到还需要喷涂浆料的厚度。具体通过还需要喷涂浆料的厚度,控制喷涂机构2喷涂浆料的量来实现墙面喷涂浆料的平整性;其中浆料量的控制通过对喷涂流量或喷涂时间或喷涂轨迹进行控制来实现。其中,喷涂机构2的运动轨迹整体呈S形。具体可以从上至下沿S形轨迹进行喷涂,或者从下至上沿S形轨迹进行喷涂,或者从左至右沿S形轨迹进行喷涂,或者从右至左沿S形轨迹进行喷涂。上述呈S形的喷涂轨迹,能够提高整体的喷涂效率。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。