一种桁架机械手多功能夹持装置
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及一种夹持装置,尤其涉及一种桁架机械手多功能夹持装置,属于桁架机械手技术领域。
背景技术
桁架机械手是一种建立在直角X,Y,Z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其控制核心通过工业控制器实现,通过控制器对各种输入信号的分析处理,做出一定的逻辑判断后,对各个输出元件下达执行命令,完成X,Y,Z三轴之间的联合运动。
现有的桁架机械手在使用时通过从上端夹持抓取货物带动货物移动,但是由于有些货物放置的货架为多层结构,当机械手对货物进行抓取时机械手无法升入下层货架对货物进行抓取,且有些货物的上端是尖锥形,单灌丛货物的上端进行抓取时无法对货物进行抓取,进而可能导致货物无法通过机械手进行搬运。
发明内容
本发明的目的是为了解决现有技术中存在的桁架机械手在使用时通过从上端夹持抓取货物带动货物移动,但是由于有些货物放置的货架为多层结构,当机械手对货物进行抓取时机械手无法升入下层货架对货物进行抓取,且有些货物的上端是尖锥形,单灌丛货物的上端进行抓取时无法对货物进行抓取,进而可能导致货物无法通过机械手进行搬运的缺点,而提出的一种桁架机械手多功能夹持装置。
为了实现上述目的,本发明采用了如下技术方案:
设计一种桁架机械手多功能夹持装置,包括机械臂,所述机械臂的下端设置有转动机构,所述转动机构的内部设置有推动机构,所述推动机构的另一端固定连接有夹持机构,所述夹持机构的表面上设置有加固机构。
优选的,所述转动机构包括U形座、转轴、转块、第一电机、U形板,所述U形座固定连接在机械臂的下端,所述U形座的两端内壁上均转动连接有转轴,两个所述转轴固定连接在同一个转块的两侧侧壁上,其中一个所述转轴的一端与第一电机的输出端固定连接,所述第一电机固定连接在U形座的一侧外壁上,所述转块的表面上固定连接有U形板。
优选的,所述推动机构包括气缸、推杆、限位孔、推板,所述气缸固定套接在U形板的中心处,所述气缸的输出端固定连接有推杆,所述推杆插接在限位孔内部,所述推杆的另一端固定连接有推板。
优选的,所述夹持机构包括移动槽、固定杆、插孔、夹持杆、推力弹簧、第二电机、转杆、转筒、钢索,五个所述移动槽呈环形开设在推板远离推杆的一端侧壁上,五个所述移动槽的内部均固定连接有固定杆,五个所述固定杆分别插接在五个插孔内部,五个所述插孔分别开设在五个夹持杆的一端表面上,五个所述固定杆靠近中心处的一端表面上均活动套接有推力弹簧,所述推板靠近推杆的一端侧壁上固定连接有五个第二电机,五个所述第二电机的输出端均固定连接有转杆,五个所述转杆的另一端均贯穿推板分别延伸至五个移动槽内部,五个所述转杆位于移动槽内部的一端均固定连接有转筒,五个所述转筒的表面上均固定连接有钢索,五个所述钢索分别固定连接在五个夹持杆的表面上。
优选的,所述加固机构包括凹槽、弹力弹簧、按块、圆槽、圆孔、转槽、固定轴、转板、活塞、三角块、拉绳、硅胶,五个所述凹槽分别开设在五个夹持杆的表面上,五个所述凹槽的底部均固定连接有弹力弹簧,五个所述弹力弹簧的另一端均固定连接有按块,五个所述按块分别卡接在五个凹槽内部,五个所述凹槽的底部侧壁上均开设有圆槽,五个所述圆槽的另一端均开设有圆孔,五个所述圆孔分别开设在五个转槽的底部内壁上,五个所述转槽分别开设在五个夹持杆的表面上,五个所述转槽的内部均固定连接有固定轴,五个所述固定轴的表面上均转动连接有转板,五个所述圆槽的内部均活动套接有活塞,五个所述活塞靠近凹槽的一端均固定连接有三角块,五个所述三角块的表面上均固定连接有拉绳,五个所述拉绳的另一端分别固定连接在五个按块的下表面上,五个所述圆槽的内部均填充有硅胶。
优选的,五个所述凹槽开设在五个夹持杆靠近推板圆心的一侧表面上。
优选的,所述凹槽与转槽相对应。
优选的,所述硅胶分别位于活塞和圆孔之间。
本发明提出的一种桁架机械手多功能夹持装置,有益效果在于:
(1)转轴转动时带动转块转动,转块带动U形板转动,U形板转动时带动气缸转动,气缸带动推杆转动,推杆带动推板转动,进而使推板与货物对应,然后启动气缸推动推杆移动,推杆带动推板向货物移动,推板带动夹持杆移动到货物的两侧,然后启动五个第二电机,通过五个第二电机带动带动五个转杆转动,五个转杆转动时带动五个转筒转动,五个转筒带动五个钢索收卷,进而使钢索带动夹持杆向推板的中心处靠近,进而使五个夹持杆与货物的表面贴合。
(2)当货物与夹持杆接触时,货物推动按块进入凹槽内部,使按块对三角块的斜面进行挤压,进而使三角块向圆槽内部移动,通过三角块推动对应的硅胶,硅胶受到挤压后向圆孔内部移动,进而使硅胶从圆孔内部挤出,通过挤出的硅胶对转板进行挤压,进而使转板从转槽内部移出,使转板对货物进行卡接,防止货物滑动,进而防止货物滑动脱落。
附图说明
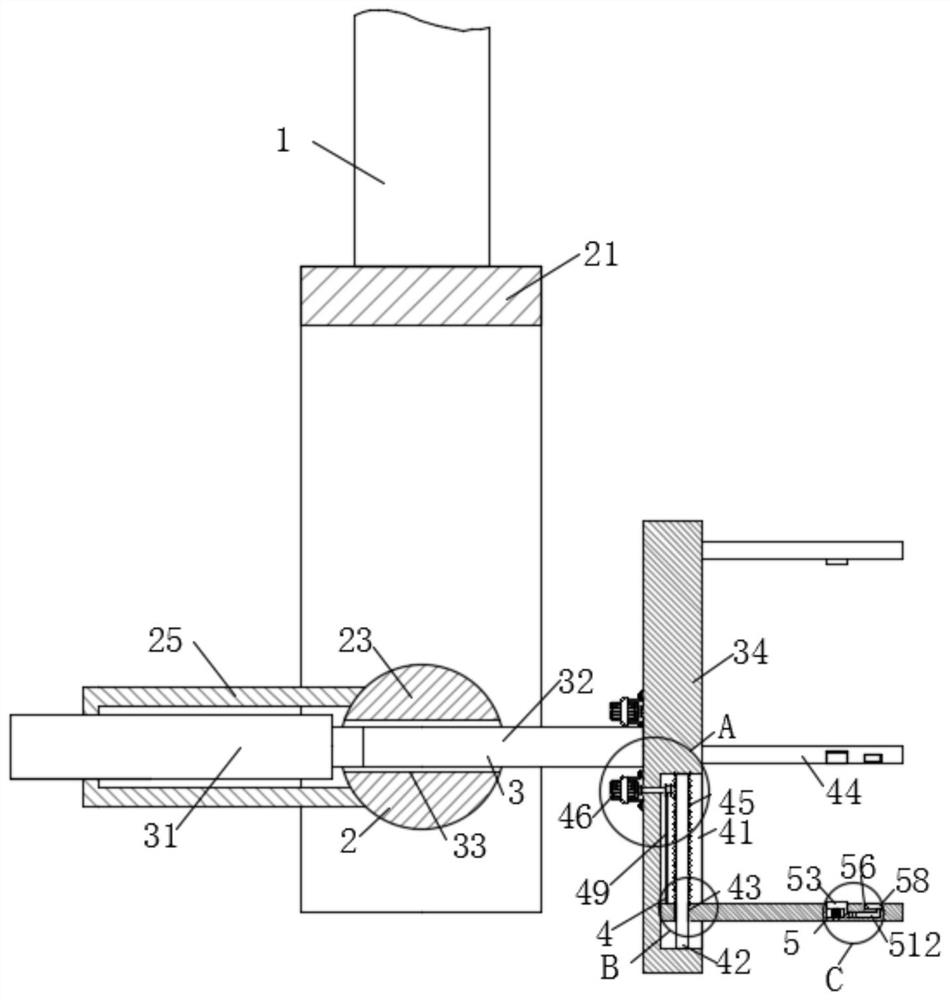
图1为本发明提出的一种桁架机械手多功能夹持装置结构示意图;
图2为本发明提出的一种桁架机械手多功能夹持装置侧视结构示意图;
图3为本发明提出的一种桁架机械手多功能夹持装置图1中A部分放大图;
图4为本发明提出的一种桁架机械手多功能夹持装置图1中B部分放大图;
图5为本发明提出的一种桁架机械手多功能夹持装置图1中C部分放大图;
图6为本发明提出的一种桁架机械手多功能夹持装置转块结构示意图;
图7为本发明提出的一种桁架机械手多功能夹持装置推板结构示意图。
图中:机械臂1、转动机构2、U形座21、转轴22、转块23、第一电机24、U形板25、推动机构3、气缸31、推杆32、限位孔33、推板34、夹持机构4、移动槽41、固定杆42、插孔43、夹持杆44、推力弹簧45、第二电机46、转杆47、转筒48、钢索49、加固机构5、凹槽51、弹力弹簧52、按块53、圆槽54、圆孔55、转槽56、固定轴57、转板58、活塞59、三角块510、拉绳511、硅胶512。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-7,一种桁架机械手多功能夹持装置,包括机械臂1,机械臂1的下端设置有转动机构2,转动机构2的内部设置有推动机构3,推动机构3的另一端固定连接有夹持机构4,夹持机构4的表面上设置有加固机构5。
转动机构2包括U形座21、转轴22、转块23、第一电机4、U形板25,U形座21固定连接在机械臂1的下端,U形座21的两端内壁上均转动连接有转轴22,两个转轴22固定连接在同一个转块23的两侧侧壁上,其中一个转轴22的一端与第一电机24的输出端固定连接,第一电机24固定连接在U形座21的一侧外壁上,转块23的表面上固定连接有U形板25,通过桁架带动机械臂1移动到货物的侧边,然后启动第一电机24带动转轴22转动,转轴22转动时带动转块23转动,转块23带动U形板25转动,U形板25转动时带动气缸31转动,气缸31带动推杆32转动,推杆32带动推板34转动,进而使推板34与货物对应。
推动机构3包括气缸31、推杆32、限位孔33、推板34,气缸31固定套接在U形板25的中心处,气缸31的输出端固定连接有推杆32,推杆32插接在限位孔33内部,推杆32的另一端固定连接有推板34,启动气缸31推动推杆32移动,推杆32带动推板34向货物移动,推板34带动夹持杆44移动到货物的两侧。
夹持机构4包括移动槽41、固定杆42、插孔43、夹持杆44、推力弹簧45、第二电机46、转杆47、转筒48、钢索49,五个移动槽41呈环形开设在推板34远离推杆32的一端侧壁上,五个移动槽41的内部均固定连接有固定杆42,五个固定杆42分别插接在五个插孔43内部,五个插孔43分别开设在五个夹持杆44的一端表面上,五个固定杆42靠近中心处的一端表面上均活动套接有推力弹簧45,推板34靠近推杆32的一端侧壁上固定连接有五个第二电机46,五个第二电机46的输出端均固定连接有转杆47,五个转杆47的另一端均贯穿推板34分别延伸至五个移动槽41内部,五个转杆47位于移动槽41内部的一端均固定连接有转筒48,五个转筒48的表面上均固定连接有钢索49,五个钢索49分别固定连接在五个夹持杆44的表面上,启动五个第二电机46,通过五个第二电机46带动带动五个转杆47转动,五个转杆47转动时带动五个转筒48转动,五个转筒48带动五个钢索49收卷,进而使钢索49带动夹持杆44向推板34的中心处靠近,进而使五个夹持杆44与货物的表面贴合。
加固机构5包括凹槽51、弹力弹簧52、按块53、圆槽54、圆孔55、转槽56、固定轴57、转板58、活塞59、三角块510、拉绳511、硅胶512,五个凹槽51分别开设在五个夹持杆44的表面上,五个凹槽51的底部均固定连接有弹力弹簧52,五个弹力弹簧52的另一端均固定连接有按块53,五个按块53分别卡接在五个凹槽51内部,五个凹槽51的底部侧壁上均开设有圆槽54,五个圆槽54的另一端均开设有圆孔55,五个圆孔55分别开设在五个转槽56的底部内壁上,五个转槽56分别开设在五个夹持杆44的表面上,五个转槽56的内部均固定连接有固定轴57,五个固定轴57的表面上均转动连接有转板58,五个圆槽54的内部均活动套接有活塞59,五个活塞59靠近凹槽51的一端均固定连接有三角块510,五个三角块510的表面上均固定连接有拉绳511,五个拉绳511的另一端分别固定连接在五个按块53的下表面上,五个圆槽54的内部均填充有硅胶512,当货物与夹持杆44接触时,货物推动按块53进入凹槽51内部,使按块53对三角块510的斜面进行挤压,进而使三角块510向圆槽54内部移动,通过三角块510推动对应的硅胶512,硅胶512受到挤压后向圆孔55内部移动,进而使硅胶512从圆孔55内部挤出,通过挤出的硅胶512对转板58进行挤压,进而使转板58从转槽56内部移出,使转板58对货物进行卡接,防止货物滑动,进而防止货物滑动脱落。
五个凹槽51开设在五个夹持杆44靠近推板34圆心的一侧表面上,进而使五个凹槽51内部的按块53贴合货物。
凹槽51与转槽56相对应,使转槽56内部的转板58与货物贴合。
硅胶512分别位于活塞59和圆孔55之间,当活塞59移动时推动硅胶512从圆孔55中喷出。
工作原理:在使用时,首先通过桁架带动机械臂1移动到货物的侧边,然后启动第一电机24带动转轴22转动,转轴22转动时带动转块23转动,转块23带动U形板25转动,U形板25转动时带动气缸31转动,气缸31带动推杆32转动,推杆32带动推板34转动,进而使推板34与货物对应,然后启动气缸31推动推杆32移动,推杆32带动推板34向货物移动,推板34带动夹持杆44移动到货物的两侧,然后启动五个第二电机46,通过五个第二电机46带动带动五个转杆47转动,五个转杆47转动时带动五个转筒48转动,五个转筒48带动五个钢索49收卷,进而使钢索49带动夹持杆44向推板34的中心处靠近,进而使五个夹持杆44与货物的表面贴合,当货物与夹持杆44接触时,货物推动按块53进入凹槽51内部,使按块53对三角块510的斜面进行挤压,进而使三角块510向圆槽54内部移动,通过三角块510推动对应的硅胶512,硅胶512受到挤压后向圆孔55内部移动,进而使硅胶512从圆孔55内部挤出,通过挤出的硅胶512对转板58进行挤压,进而使转板58从转槽56内部移出,使转板58对货物进行卡接,防止货物滑动,进而防止货物滑动脱落。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种桁架机械手多功能夹持装置
- 一种桁架上下料机械手用180°换向夹持手爪