一种燃气管网智能巡检方法与系统
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及环境检测技术领域,具体涉及一种燃气管网智能巡检方法与系统。
背景技术
现有技术中,巡视机器人采用计算机技术进行行驶机构机电系统集成,并在搭载音视频等专业传感器的基础上根据路由线路图案在相对封闭空间内进行无人巡视已应用于建筑物和密集设备布设场所的安防领域,具有基于位置的基本数据采集定制能力。
但是在针对开放环境的燃气管网巡检领域中,燃气管网的管路、阀组、闸井等管网设备基于大尺度三维空间在不同物理介质中布设、在开阔空间内广泛部署,巡检信息既需要包括对管网系统原始部署阶段固有状态特征的部分显性反馈,也需要包含管网系统所处物理介质环境变化状态的部分显性反馈。对于燃气管网的巡检涉及不同信息维度空间内信号采集的精度与广度间的矛盾,同时也涉及不同尺度区域内信号采集的数据量与实时性的矛盾。现有巡视机器人技术在数据处理和信息采集两方面都无法满足。
现有机器人的巡检路线依据固定路线调动传感器进行预案巡检,所有信息采集路由和信息采集区域都是延续传统信息采集技术思路,基于先验经验或通用规则设置,本质是以专业传感器作为窄带滤波器进行环境信息采集,将采集的管网所处空间基础特征和管网运行态势特征,向固定路线所处有限的二维空间进行映射,造成管网所处空间中管网特征采集和环境信息采集大量缺失。最终导致无法实现管网运行态势的多维度获取,无法形成对运行态势的高维度分析和预测。
虽然将北斗高精准定位与导航自主行驶系统相结合可以实现巡检机器人对巡检路径的融合定位,实现无人驾驶自主避障行驶和精准定位能力,但现有巡视机器人的专业传感器布设结构依旧遵循传统简单时序采集方式缺乏灵活性,不能获取采集方向上周围采集区域内管网设备和环境的运行态势的完整空间信息,无法有效建立现场环境的完整空间维度。现有技术通过服务端利用现有巡检机器人的采集信息对完整管网空间内运行态势的还原存在离散性和关键信息缺失,仅依靠现有数据处理优化手段无法形成对复杂管网拓扑形态形成的环境空间运行态势进行统一的多层次的有效分析和预警。
为了提升燃气企业的本质安全水平,减少安全风险、降低劳动强度、实现降本增效,需要解决如何形成燃气管路领域对复杂路由环境执行有效巡检的技术问题。
发明内容
鉴于上述问题,本发明实施例提供一种燃气管网智能巡检方法与系统,解决现有智能巡检缺乏对管网及管网环境空间的完整信息维度进行有效感知的技术问题。
本发明实施例的燃气管网智能巡检方法,包括:
对管网空间进行分割形成局部空间内实体资源的设计特征描述;
对所述局部空间内所述实体资源的物理属性通过巡检机器人进行持续性采样形成形态特征描述;
对所述局部空间内所述实体资源的环境属性通过所述巡检机器人进行持续性采样形成环境特征描述;
通过持续的所述形态特征描述和所述环境特征描述进行偏移量化形成管网空间的客观态势描述;
根据所述设计特征描述获取所述实体资源的主观态势描述,根据所述客观态势描述和所述主观态势描述评估所述实体资源的运行状态和状态趋势。
本发明实施例的燃气管网智能巡检系统,包括:
存储器,用于存储上述的燃气管网智能巡检方法处理过程对应的程序代码;
处理器,用于执行程序代码。
本发明实施例的燃气管网智能巡检系统,包括:
巡检机器人,用于对巡检路由上局部空间内实体资源的物理属性和环境属性进行持续性采样;
管网运行态势评估系统,用于根据持续性采样形成的局部形态特征描述和环境特征描述形成管网环境空间的整体客观态势描述的处理过程;根据获取的设计特征描述、主观态势描述和客观态势描述评估实体资源的运行状态和状态趋势的处理过程。
本发明实施例的燃气管网智能巡检方法和系统充分利用现有管网系统的设计资源形成管网系统实体资源本体的丰富主观描述维度,同时利用巡检手段获取客观环境中与主观描述维度对应的实体资源物理属性和环境属性的丰富客观描述维度。进而形成基于管网系统运行数据的主观态势描述与基于客观环境表现数据的客观态势描述,实现从客观态势和主观态势不同数据维度的相关性客观描述管网运行状态评估,以实现管网状态预测,提升燃气企业的本质安全水平。
附图说明
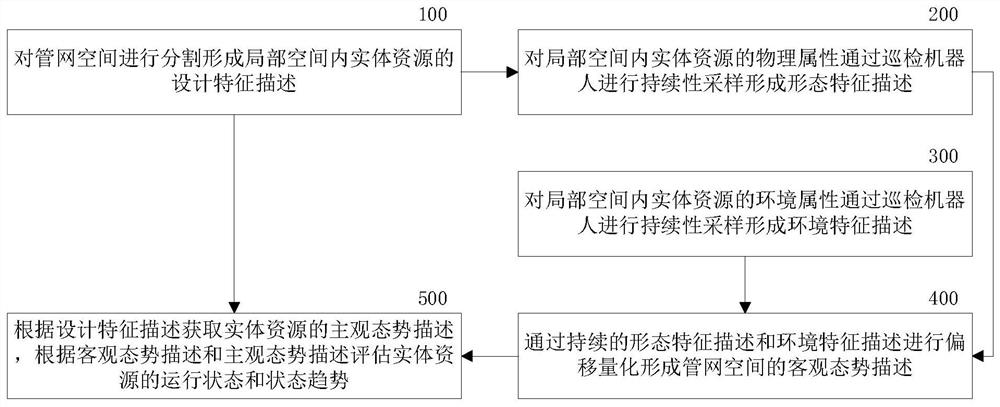
图1所示为本发明一实施例燃气管网智能巡检方法的流程示意图。
图2所示为本发明一实施例燃气管网智能巡检方法中设计特征描述形成流程示意图。
图3所示为本发明一实施例燃气管网智能巡检方法中持续性采样流程示意图。
图4所示为本发明一实施例燃气管网智能巡检方法中客观态势描述形成流程示意图。
图5所示为本发明一实施例燃气管网智能巡检方法中评估流程示意图。
图6所示为本发明一实施例燃气管网智能巡检系统的巡检机器人的整体结构示意图。
图7所示为本发明一实施例燃气管网智能巡检系统的巡检机器人的传感器综合布设机构中支撑框架的主视(局部剖视)示意图。
图8所示为本发明一实施例燃气管网智能巡检系统的巡检机器人的传感器综合布设机构中支撑框架的俯视(局部剖视)示意图。
图9所示为本发明一实施例燃气管网智能巡检系统的巡检机器人的传感器综合布设机构中传动结构的主视(局部剖视)示意图。
具体实施方式
为使本发明的目的、技术方案及优点更加清楚、明白,以下结合附图及具体实施方式对本发明作进一步说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明一实施例燃气管网智能巡检方法如图1所示。在图1中,本实施例包括:
步骤100:对管网空间进行分割形成局部空间内实体资源的设计特征描述。
本领域技术人员可以理解,管网系统依据地理环境和用户资源位置进行建设和优化,管网系统包括但不限于不同等级的管道、阀门和闸井等组成设施。管网系统和相邻的环境空间共同构成管网空间。管网系统的组成设施作为实体资源包括本身的物理属性和所处环境的环境属性。通过分割管网空间形成的局部空间可以对实体资源做针对性描述,特别包含实体资源所部署依据的设计特征描述,以体现物理属性和环境属性的客观性。
步骤200:对局部空间内实体资源的物理属性通过巡检机器人进行现场持续性采样形成形态特征描述。
现场持续性采样包括在局部空间内对实体资源的物理信号采集,也包括在巡检路由上连续或间隔局部空间内对实体资源的物理信号采集。实体资源的物理属性包括但不限于设计特征所包括的物理属性例如理化特征,还包括受环境影响的物理属性例如氧化痕迹、泄露痕迹等。形态特征描述是对实体资源在现实环境中自然变化过程中固有属性的量化数据形成过程的结果。持续性采样形成的形态特征描述具有实时属性、空间属性。
步骤300:对局部空间内实体资源的环境属性通过巡检机器人进行现场持续性采样形成环境特征描述。
实体资源的环境属性包括但不限于实体资源所处物理环境的物理属性,还包括物理环境变化形成的物理属性的变化例如侵入、占位等。环境特征描述是对实体资源所处现实环境变化过程中环境属性的量化数据形成过程的结果。持续性采样形成的环境特征描述具有实时属性、空间属性。
步骤400:通过持续的形态特征描述和环境特征描述进行偏移量化形成管网空间的客观态势描述。
通过巡检机器人可获得的多样性维度数据形成的形态特征描述和环境特征描述的积累性数据可以从时序性角度和空间角度描述实体资源主体和实体资源环境客体的现实相互影响,并由局部空间内的现实相互影响形成对管网空间中依托环境空间的对管网设施客观影响的量化描述。
步骤500:根据设计特征描述获取实体资源的主观态势描述,根据客观态势描述和主观态势描述评估实体资源的运行状态和状态趋势。
利用设计特征描述实现对局部空间实体资源的定位,通过定位可以通过现有监控手段获得的管网传感器系统形成运行数据实现在确定局部空间内的态势(矢量量化)矢量描述作为主观态势描述。主观态势描述形成管网的自主状态表达,形成管网状态的内在定性描述,客观态势描述形成管网的客观状态表达,形成管网状态的外在定量描述,进而形成客观反映的运行状态和状态趋势预测。
本发明实施例的燃气管网智能巡检方法充分利用现有管网系统的设计资源形成管网系统实体资源本体的丰富主观描述维度,同时利用巡检手段获取客观环境中与主观描述维度对应的实体资源物理属性和环境属性的丰富客观描述维度。进而形成基于管网系统运行数据的主观态势描述与基于客观环境表现数据的客观态势描述,实现从客观态势和主观态势不同数据维度的相关性客观描述管网运行状态做出评估,以实现管网状态预测,提升燃气企业的本质安全水平。通过对管网系统的设计特征、巡检现场物理特征和巡检环境特征融合获得的描述维度,可以从完整环境空间角度针对管道上访的环境异常、施工异常、管网状态等特定巡检场景进行识别和分析,对枯树占位塌陷、开挖、围挡等具体侵入事件形成立体识别和分析。可以有效对泄露事件现场态势做出精准分析和趋势预测。
本发明一实施例燃气管网智能巡检方法中设计特征描述形成如图2所示。在图2中,设计特征描述形成包括:
步骤110:根据设计资源确定基础分割维度,根据基础分割维度建立管网空间的局部空间分割基点。
本领域技术人员可以理解,设计资源可以如实反映管网整体和局部的布设设施的性能、结构和装配关系,包括但不限于管网建设竣工时的工程设计图纸和施工竣工资料的数据集合,以及运维期间的管网改造和维修资料的数据集合。
确定基础分割维度包括:
根据管网物理构造形成设施逻辑层;例如低压管路布设逻辑层、低压阀体布设逻辑层、中压管路布设逻辑层、中压阀体布设逻辑层、次高压管路布设逻辑层、次高压阀体布设逻辑层等。
建立局部空间分割基点包括:
建立每个设施逻辑层的布设重心;布设重心根据管网规模和密度形成,每个设施逻辑层至少存在一个。
确定所有设施逻辑层的布设重心的地理位置分布,根据地理距离特征进行聚类,形成聚类中心,以聚类中心的地理位置作为局部空间分割基点。
步骤120:根据局部空间分割基点形成管网空间内单一基础分割维度内的分割尺度,形成单一基础分割维度内的单一局部空间和对应的单一设计特征描述。
局部空间分割基点在管网空间内具有确定坐标。单一基础分割维度(即设施逻辑层)内的分割尺度可以根据设备密度、覆盖尺度或应用等级进行确定。各单一基础分割维度形成的单一局部空间通常不相等。
根据单一局部空间的确定坐标范围(包括三维或二维空间范围)对设计资源进行分割,形成单一基础分割维度中每个单一局部空间中确定设施的设计特征描述。
步骤130:建立单一基础分割维度间单一局部空间之间的相关度和包含度,根据相关度和包含度确立局部空间中实体资源的空间局部特征,根据空间局部特征和设计特征描述形成实体资源的设计特征描述。
相关度的确定根据对应设计资源是否包含信号或介质传递关系确定。包含度的确定根据单一局部空间的坐标范围的重叠确定。
根据相关度和包含度策略将相关和包含的单一局部空间形成局部空间,结合相关和包含的单一局部空间的设计特征描述为局部空间中实体资源建立相关的空间局部特征和设计特征描述。
本发明实施例的燃气管网智能巡检方法利用管网系统设施的逻辑分层形成基本维度并通过聚类形成网关空间分隔基点,形成的局部空间使实体资源空间特征与设计特征相结合,重新构建了管网系统的基本构成单位和基本构成单位的基本描述维度。摆脱了对现有管网系统的有限描述维度规则,使得设计资源与环境现实空间和设施现实物理特征形成关联映射,有利于形成丰富的设施描述维度。。
本发明一实施例燃气管网智能巡检方法中持续性采样过程如图3所示。在图3中,形态特征描述形成的持续性采样过程包括:
步骤210:根据实体资源的设计特征描述形成局部空间中实体资源的连续轮廓。
局部空间的实体资源具有与空间特征相关的设计特征描述,可以确定实体资源的局部形态特征和局部结构特征。根据局部结构特征建立实体资源的连续轮廓可以形成相邻局部空间的连续轮廓的位置坐标或投影坐标,根据位置坐标可以按需根据巡检策略和规避策略形成巡检路由。
巡检策略和规避策略可以根据坐标信息和连续轮廓的空间信息形成导航自主行驶系统的巡检路由。巡检策略包括在连续局部空间内的巡检路由最短行程判断过程或和巡检路由满足连续局部空间内连续轮廓最大投影面积判断过程。规避策略包括对连续局部空间内连续轮廓对巡检路由的可能阻挡判断过程。
步骤220:根据实体资源的设计特征描述形成连续轮廓的物理类型特征和对应的约束类型特征。
设计特征描述包括实体资源的物理类型例如承压指标、容纳介质类型或运行标准范围等可以构建实体资源的物理类型特征。相应的,对应物理类型的约束类型也可以确定例如结构变化范围、容纳介质泄露指标等可以构建实体资源的约束类型特征,即实现对实体资源的失效或标准进行有效描述的物理特征例如对连续轮廓中确定位置的确定管路的压力泄露的温度特征。
步骤230:利用巡检机器人搭载传感器采样约束类型特征数据形成形态特征描述。
本领域技术人员可以理解,根据需要巡检机器人搭载本领域内必须的专业传感器。利用巡检机器人沿巡检路由规划针对局部空间内连续轮廓做信号采集,采集反映约束类型特征的数据以及部分物理类型特征。
本发明实施例的燃气管网智能巡检方法根据局部空间内实体资源的特征形成巡检路由和信号采集过程,保证了针对局部空间内实体资源的约束类型特征实现现实环境反馈。为管网设施提供新的现实形态描述维度的同时提供了实时现场数据。使得形态特征描述的形成可以采用多个巡检机器人分布实施进行,可以保证实时性和采集反馈效率。
如图3所示,在本发明一实施例中,环境特征描述形成的持续性采样过程包括:
步骤310:根据实体资源的设计特征描述形成局部空间中实体资源连续轮廓对应的环境空间。
连续轮廓的坐标空间基于设计特征描述可以确定,根据可以获得的GIS(地理信息系统)地理信息可以形成对应的环境空间的确定描述数据。
步骤320:根据实体资源的设计特征描述形成环境空间中的侵害类型特征和侵害类型特征的至少三级安全状态描述。
设计特征描述可以确定对实体资源的侵害种类,根据侵害种类形成环境空间中的侵害类型特征例如占位、挤压、悬空或高低温等。安全状态描述根据局部空间内实体资源的既有物理特征与环境空间中的侵害类型特征的相互特征依存可能性建立侵害类型特征的次级特征描述。
步骤330:根据安全状态描述利用巡检机器人搭载传感器采样形成不同尺度区域内侵害类型特征的量化采集,根据不同安全状态描述的量化采集形成环境空间的环境特征描述。
安全状态描述形成对环境空间进行信号采样动作的基本控制策略。根据安全状态描述在采样过程中调整巡检机器人搭载的传感器的采样尺度和采样区域,采集侵害类型特征信号,随着调整传感器的采样尺度和采样区域形成环境空间的环境特征描述。
本发明实施例的燃气管网智能巡检方法根据局部空间内实体资源的特征形成环境空间的采集过程,保证了针对局部空间内实体资源的侵害类型特征的量化采集,实现现实环境反映。为管网设施提供新的现实形态描述维度的同时提供了现实数据。
本发明一实施例燃气管网智能巡检方法中客观态势描述形成过程如图4所示。在图4中,客观态势描述形成过程包括:
步骤410:根据实体资源设计特征描述的物理类型特征和空间局部特征建立管网的局部空间结构特征图谱。
利用局部空间形成管网的非等比下采样使得每个局部空间具有相同或不同的图谱像素占位,以降低针对管网全网进行数据处理的数据量。局部空间根据空间局部特征获得相对位置坐标,将物理类型特征进行矢量化和归一化,使得每个局部空间对应的具有结构特征。结构特征包括但不限于可描述的形态组合特征和不可描述的形态组合特征。
步骤420:根据形态特征描述中的约束类型特征和环境特征描述中的环境空间的侵害类型特征建立管网的局部空间威胁特征图谱。
根据局部空间结构特征图谱的分辨率,利用实体资源与局部空间的关联性,根据连续轮廓的约束类型特征和对应的环境空间的侵害类型特征进行矢量化和归一化,使得每个实体资源的连续轮廓具有负面因素特征。负面因素特征包括但不限于可描述的形态组合特征和不可描述的形态组合特征。
步骤430:叠加局部空间结构特征图谱和局部空间威胁特征图谱形成局部空间的时序性客观态势描述。
通过局部空间的对应性,利用连续轮廓的负面因素特征和局部空间的结构特征相叠加,使得确定的局部空间的描述具有结构特征和负面因素特征。
本发明实施例的燃气管网智能巡检方法利用局部空间对燃气管网进行下采样处理利用非等比的局部空间作为图谱像素形成燃气管网的特征图谱,提高管网特征的处理效率。同时赋予局部空间结构特征和负面因素特征使得燃气管网的局部细节可以通过结构特征和负面因素特征的变化形成时序性客观态势描述,实现直观表达沿巡检路由作现场持续性采样过程的现实环境变化。
本发明一实施例燃气管网智能巡检方法中评估过程如图5所示。在图5中,评估实体资源的运行状态包括:
步骤510:根据生产运行数据形成实体资源的主观态势描述特征维度。
本领域技术人员可以理解,生产运行数据由燃气管网系统内部形成。
将生产运行数据进行数据形成过程分解确定中间数据形成位置;根据形成位置确定实体资源,并将中间数据作为实体资源主观态势描述特征维度。
步骤520:根据主观态势描述特征维度从客观态势描述中提取对应的态势描述特征维度数据并确定时序性偏移量化,通过时序性偏移量化形成实体资源的运行状态。
本领域技术人员可以理解,主观态势描述与客观态势描述都针对局部空间中的实体资源。利用主观态势描述中的实体资源的特征维度与局部空间的客观态势描述中的态势描述特征维度数据匹配,提取实体资源结构特征或局部空间威胁特征数据的时序性偏移量化;
通过时序性偏移量化,确定具体实体资源的运行状态。
本发明实施例的燃气管网智能巡检方法利用燃气管网系统的实体资源的主观特征维度匹配客观的态势描述特征维度,利用客观态势描述的时序性差异量化评估实体资源的运行状态,利用客观数据反映燃气管网的运行状态,实现主观维度和客观维度间的相互验证。
如图5所示,在本发明一实施例中,评估实体资源的状态趋势包括:
步骤530:根据实体资源的运行状态形成既往状态趋势。
利用时序性偏移量化的不同时间尺度形成既往运行安全状态趋势,作为实体资源主观态势描述特征维度变化趋势的参考数据。
步骤540:根据既往状态趋势建立客观态势描述仿真参数以实现状态趋势预测。
利用既往运行安全状态趋势建立仿真过程不同时长尺度的仿真初始值;
根据实体资源主观态势描述特征维度变化趋势选取相应的仿真初始值。
本发明实施例的燃气管网智能巡检方法利用运行状态的既往时序性形成客观运行状态,并利用客观运行状态与主观运行状态的偏离作为状态趋势的客观态势描述仿真参数,提供主客观运行状态趋势的仿真基础。
本发明一实施例燃气管网智能巡检系统,包括:
存储器,用于存储上述实施例燃气管网智能巡检方法处理过程对应的程序代码、采样数据和形成的中间数据;
处理器,用于运行上述实施例燃气管网智能巡检方法处理过程对应的程序代码。
本发明一实施例燃气管网智能巡检系统,包括:
巡检机器人,用于对巡检路由上局部空间内实体资源的物理属性和环境属性进行持续性采样。
本领域技术人员可以理解,巡检机器人本体利用现有机电集成技术和机电控制策略,同时利用全球卫星导航系统(NGSS)形成巡检机器人本体定位。实体资源包括但不限于管线资源和与管线相关的环境资源。实体资源通过巡检机器人本体搭载的专业传感器感知和采样获取。持续性采样基于巡检路由,巡检路由包括整体趋势性的具体路由线路和局部空间不确定性的受环境触发形成的局部随机路由线路。
管网运行态势评估系统,用于根据持续性采样形成的局部形态特征描述和环境特征描述形成管网环境空间的整体客观态势描述的处理过程;根据获取的设计特征描述、主观态势描述和客观态势描述评估实体资源的运行状态和状态趋势的处理过程。
本领域技术人员可以理解,管网运行态势评估系统基于计算机系统,计算机系统包括存储器、处理器和通信端口,其中:
存储器,用于存储处理过程对应的程序代码、采样数据和形成的中间数据;
处理器,用于运行各处理过程对应的程序代码;
通信端口,用于接收采样数据,在各处理过程间形成数据交换。
运行处理过程包括但不限于上述实施例燃气管网智能巡检方法的处理过程。通信端口包括但不限于数据传输的实体端口和数据交换的虚端口。处理器和存储器包括但不限于集中式部署或分布式部署。
本发明实施例的燃气管网智能巡检系统利用巡检机器人可以基于管网全网规划形成并发的巡检路由,在最短时序周期内获取多种类型传感器形成的丰富维度的采样数据,为基础数据处理过程和复杂流程处理过程丰富数据维度、提供高质量数据。通过形态特征描述、环境特征描述、客观态势描述、设计特征描述和主观态势描述的处理过程,以及各处理过程间的数据交换形成的外在运行状态和运行状态趋势的处理过程对燃气管网实体资源的整体评估,保证了燃气管网在线过程中本质安全水平的实时反馈准确度,提供了应对突发自然灾害、紧急故障、潜在环境危害的遥感预测能力。
本发明一实施例燃气管网智能巡检系统的巡检机器人如图6所示。在图6中,巡检机器人包括:
行走机构111,用于受控形成本体位移轨迹。
高度调节机构112,用于受控调节传感器综合布设机构的固定位置的相对高度。
水平角度调节机构113,用于受控调节传感器综合布设机构的水平指向。
俯仰角度调节机构114,用于固定传感器综合布设机构,受控调节传感器综合布设机构的俯仰指向。
本领域技术人员可以理解,本体承载或容纳进行巡检采样的有效载荷,有效载荷包括但不限于用于动作的机电结构、用于提供能源的储能结构和用于采集物理信号的传感器集合等。位移轨迹以巡检路由绝对位置为参考基准。本领域技术人员可以理解高度调节、水平角度调节和俯仰角度调节各机构的调节过程隶属于整体受控逻辑。
传感器综合布设机构115,用于受控调整传感器形成的采集矩阵在冠状平面内的传感器投影间距和矢状平面内的传感器投影间距。
传感器综合布设机构形成专业传感器的布设空间,并形成布设空间在冠状平面和矢状平面方向的布设空间变化和专业传感器的间距变化。这种变化必然导致信号采集焦点的相应规律性变化。
本发明实施例的燃气管网智能巡检系统通过巡检机器人充分利用现有机器人承载专业传感器载荷和通用传感器载荷,并形成针对巡检路由的基本轨迹控制和动作控制,可以有效形成管网环境的分布式采集部署架构。通过传感器综合布设机构将专业传感器矩阵化,形成传感器矩阵的变化参量,使得物理信号的采集焦点、范围、分辨率可以受控有序变化,实现管网及管网环境的复杂维度辨识的信号采样机制。同时,由于使得智能巡检设备针对非占主道行驶,信号采集离线精度和合规车载的技术目的得以实现。
如图6所示,在本发明一实施例中,传感器综合布设机构115包括:
联动机电容纳筒体116,用于提供与调节机构的固定位置,提供传感器的电源线、信号线和联动调节结构的容纳空间和走线空间,容纳控制传感器承载链接臂的联动调节结构。
与调节机构的固定位置通常设置在垂直于容纳筒体轴线的侧壁对称点位上。容纳筒体在保持容积的同时保持刚性。走线空间包括但不限于容纳筒体侧壁上用于互通的过孔和容纳筒体侧壁内外的卡扣、卡榫、限位槽、限位柱、支撑框架等固定结构。
端头适配法兰盘体117,用于在联动机电容纳筒体一端提供传感器的电气连接端口和固定适配结构。
端头适配法兰盘体上提供固定类型传感器所需的电气连接端口和固定适配结构,端头适配法兰盘体上提供与联动机电容纳筒体的容纳空间和走线空间连通的过孔、适配接口或端口。
传感器承载链接臂118,用于与联动机电容纳筒体活动连接,受控围绕联动机电容纳筒体作收展动作,提供灵活类型传感器的电气连接端口和固定适配结构,受控改变固定适配结构的指向角度。
一个传感器承载链接臂对应固定一组专业传感器(包含至少一种物理信号的专业传感器),各组专业传感器间根据采样需求形成确定物理信号类型和类型之间的初始采集矩阵。收展动作包括各传感器承载链接臂的同步动作。固定适配结构包括受控微动结构。
本发明实施例的燃气管网智能巡检系统通过传感器综合布设机构与高度、水平角度和俯仰角度的调节机构相配合,在现有定位技术确定传感器空间点坐标的基础上,以点坐标为参考基准,为形成随动参考基准的传感器矩阵提供了灵活布设结构,形成传感器矩阵针对的采样空间在容积、采样焦点、采样密度的变化灵活性,满足管网运行态势评估过程中对采样维度的多样性需求。可以形成上述实施例燃气管网智能巡检方法中的持续性采样需求。
本发明一实施例燃气管网智能巡检系统的巡检机器人的传感器综合布设机构局部如图7所示。在图7中,传感器承载链接臂118包括一个中空的矩形盒体121和一对固定随动圆环122。矩形盒体121沿长度延伸方向形成固定端面123和延伸端面124,在固定端面123和延伸端面124间包括相对的贴合端面125和支撑端面126,贴合端面125贴合联动机电容纳筒体116,支撑端面126支撑固定适配结构。固定随动圆环122共轴线,且固定随动圆环122的轴线与矩形盒体121长度延伸方向垂直,矩形盒体121固定在固定随动圆环122之间,矩形盒体121的固定端面与贴合端面形成的相交部分形成适配弧面127,适配弧面127的半径和圆心与固定随动圆环122的内环相同,适配弧面127的弧度小于90度。矩形盒体121和固定随动圆环122的连接部位开设过孔。适配弧面127的弧度取定可以保证传感器承载链接臂118收缩时贴合联动机电容纳筒体116,展开时可以达到至少90度,同时有利于固定随动圆环122的固定转轴位于联动机电容纳筒体116侧壁内,充分利用容纳筒体的容纳空间。
在支撑端面126上沿长度延伸方向设置一组固定适配结构130,固定适配结构130包括中空的三棱柱,三棱柱的长度延伸方向与矩形盒体121的长度延伸方向垂直,三棱柱包括一个定位端面131,在定位端面131上形成固定结构(固定结构利用现有固定结构形成),定位端面131与矩形盒体121的支撑端面126形成5至15度的夹角,定位端面131朝向延伸端面124方向,三棱柱与矩形盒体121间开设过孔。定位端面131与矩形盒体121的支撑端面126的夹角选择是为了满足传感器承载链接臂118在展开-收缩的转动过程中,各支撑端面126搭载的同类型专业传感器的采样焦点具有外散性,可以采样更宽的整体范围,有利于对三维属性的环境空间连续采样。可以在相同采集时序性节点上获得首要采集焦点位置周边尽可能详细三维环境空间内的物理信号,有利于获取较准确的多维度采集信息。
如图7所示,在本发明一实施例中,固定适配结构130的定位端面131采用双金属材料132,在三棱柱的中空腔体内设置受控热电阻(附图中未示出)。固定适配结构130保证了在传感器承载链接臂118展开-收缩的转动过程中对搭载的同类型专业传感器的采样焦点的确定微动调节,可以适应在展开-展开到位过程中对首要采集焦点位置周边三维环境空间采样范围的调整。通过配置传感器承载链接臂118上的专业传感器位置可以确定展开过程中焦点位置周边三维环境空间的基本范围,通过固定适配结构130的微动调整可以改变三维环境空间的基本范围以适应对环境空间中遮挡、延伸或开阔变化的采样需求。
如图7所示,在本发明一实施例中,沿长度延伸方向,相邻固定适配结构的固定间距逐渐扩大,相邻固定适配结构的固定高度逐渐增加。固定适配结构的渐进变化可以扩大专业传感器的安装适配性和夹角一致性,改善连续固定适配结构的传感器连续装配采样间距不足带来的遮蔽和干扰。
如图7所示,在本发明一实施例中,沿长度延伸方向,在一组固定适配结构130的末端与矩形盒体121的延伸端面124之间设置反向固定适配结构133,反向固定适配结构133包括中空的三棱柱,三棱柱的长度延伸方向与矩形盒体121的长度延伸方向垂直,三棱柱包括一个反向定位端面134,在反向定位端面134上形成固定结构(固定结构利用现有固定结构形成),反向定位端面134与矩形盒体121的支撑端面126形成15至25度的夹角,反向定位端面134朝向固定端面123方向,三棱柱与矩形盒体121间开设过孔。反向固定适配结构133保证了在采样间距中传感器冠状面投影最大采样间距边缘提供采样信号密度增强的技术手段。保证主要采样焦点周边确定范围的信号采样可以得到最边缘传感器的有效补强,为主要采样焦点周边提供了差分信号采集的可能。
如图7所示,在本发明一实施例中,固定适配结构130的定位端面131采用双金属材料,在三棱柱的中空腔体内设置受控热电阻(附图中未示出)。
本发明一实施例燃气管网智能巡检系统的巡检机器人的传感器综合布设机构局部如图8所示。在图8中,传感器承载链接臂118包括张力转轴140,与联动机电容纳筒体侧壁通过张力转轴140活动连接。张力转轴140包括转轴主体141和一对支撑凸起142,转轴主体141为一圆柱体,在转轴主体141侧壁中部沿周向开设一个环形凹槽143,环形凹槽143两侧的转轴主体141侧壁形成对称的固连端面144。支撑凸起142对称固连在转轴主体141的两个顶端,支撑凸起142与转轴主体141共轴线且沿轴线开设贯通过孔。张力转轴140通过支撑凸起142转动固定在联动机电容纳筒体116侧壁开孔内侧的固定框架上,固定框架采用必要的现有固定结构使张力转轴140的轴线与联动机电容纳筒体116的轴线垂直。张力转轴140通过固连端面144与传感器承载链接臂118的固定随动圆环122内环适配固定,使得传感器承载链接臂118的延伸方向可以与联动机电容纳筒体116的轴线平行或垂直或过垂直。通过在张力转轴140的环形凹槽143上环绕动力皮带161,形成传感器承载链接臂118形成转动和静止动作的功率信号来源。张力转轴140沿联动机电容纳筒体侧壁周向布设,与传感器承载链接臂118一一对应。
本发明一实施例燃气管网智能巡检系统的巡检机器人的传感器综合布设机构局部如图9所示。在图9中,联动机电容纳筒体116包括容纳筒体150和内置于容纳筒体150的联动调节结构160、展开功率装置175和收缩功率装置176。收缩功率装置176包括带锁止功能的伺服电机177、丝杠178、丝杠副179和滑动转盘180,伺服电机177的输出轴与丝杠178、丝杠副179和滑动转盘180共轴线,丝杠178固连在伺服电机177的输出轴上,丝杠副179固定在滑动转盘180中心,丝杠副179沿丝杠178移动,滑动转盘180受导线牵引保持相对静止。滑动转盘180可以采用轴承或转动套管。
展开功率装置175和收缩功率装置176结构相同间隔设置且与容纳筒体150共轴线,收缩功率装置176位于展开功率装置175与容纳筒体150的末端之间。展开功率装置175和收缩功率装置176的伺服电机177通过固定框架固连在容纳筒体150的内侧壁上。
联动调节结构160与传感器承载链接臂118一一对应。传感器承载链接臂118沿联动机电容纳筒体116周向均匀布设,传感器承载链接臂118的延伸方向与联动机电容纳筒体116的延伸方向一致,联动调节结构160的组成结构布设方向与联动机电容纳筒体116的延伸方向一致。
联动调节结构160包括动力皮带161、皮带收缩端第一约束转轴162和皮带收缩端第二约束转轴163、皮带展开端约束转轴164,各约束转轴的轴线与张力转轴140的轴线平行,且转动固定在容纳筒体150内。各转轴可以由现有技术常用的转动套管或小尺寸轴承形成。
皮带收缩端第一约束转轴162、皮带收缩端第二约束转轴163和皮带展开端约束转轴164成三角形顶点排列,皮带收缩端第一约束转轴162位于张力转轴140与皮带收缩端第二约束转轴163之间,位于张力转轴140与皮带收缩端第二约束转轴163的轴线投影点连线远离容纳筒体150侧壁一侧,皮带展开端约束转轴164位于皮带收缩端第一约束转轴162与皮带收缩端第二约束转轴163的轴线投影点连线远离容纳筒体150侧壁一侧。
动力皮带161包括皮带收缩端和皮带展开端,动力皮带161半环绕张力转轴140的环形凹槽143,皮带收缩端离开环形凹槽143后由皮带收缩端第一约束转轴162远离容纳筒体150侧壁一侧和皮带收缩端第二约束转轴163靠近容纳筒体150侧壁一侧穿过,皮带展开端离开环形凹槽143后由皮带展开端约束转轴164靠近容纳筒体150侧壁一侧穿过。穿过皮带收缩端第一约束转轴162、皮带收缩端第二约束转轴163和穿过皮带展开端约束转轴164的动力皮带161局部不接触。
本发明一实施例中,皮带收缩端和皮带展开端离开环形凹槽143的位置间隔15度至45度弧长。间隔弧长保证了动力皮带161与张力转轴140的接触面积,保证了接触面和接触面的纹理配合可以形成巨大的静摩擦力,保证张力转轴140随动动力皮带161。同时,较小的间隔弧长保证了利用约束转轴形成的三角形顶点排列更易形成收缩端皮带和展开端皮带的较极端转折角度,提高展开功率装置175和收缩功率装置176的功率传导。
本发明一实施例中,局部环绕皮带展开端约束转轴164的动力皮带的(以转轴164和动力皮带形成的)展开角度为钝角且朝向容纳筒体150的轴线,局部环绕皮带收缩端第二约束转轴163的动力皮带的展开角度为钝角且朝向容纳筒体150的轴线,局部环绕皮带收缩端第一约束转轴162的动力皮带的展开角度为锐角且朝向容纳筒体150的侧壁。
联动调节结构160还包括距离引导转轴171、约束牵引力导线172、展开牵引力导线173,展开牵引力导线173的一端固连动力皮带161的皮带展开端另一端固连在展开功率装置175的滑动转盘180的侧壁上。距离引导转轴171布设在展开功率装置175的伺服电机177对应的容纳筒体150内侧壁上,约束牵引力导线172的一端固连动力皮带161的皮带收缩端另一端穿过距离引导转轴171靠近容纳筒体150内侧壁一侧后固连在收缩功率装置176的滑动转盘180的侧壁上。
展开功率装置175和收缩功率装置176的输出功率分别牵引动力皮带161的展开端和收缩端形成动力皮带围绕张力转轴140绷紧制造静摩擦力。通过调节两个功率转置同步转动时的角速度差值和角速度恒定值,可以灵活适应传感器承载链接臂118的传感器负荷和张开-收缩速率,充分适应专业传感器搭载需求和传感器采样过程的传感器矩阵调节。
如图9所示,在本发明一实施例中,还包括收束圈梁174,收束圈梁174为一圆环,圆环上均匀分布轴承或转动套管,圆环通过固定支架固连在容纳筒体150的内侧壁上。每个联动调节结构160的展开牵引力导线173通过收束圈梁174内圈后靠近容纳筒体150的轴线使得经过收束圈梁174的导线部分趋于平行。收束圈梁174同时与每一组约束转轴形成的三角形顶点排列配合形成较极端转折角度,提高展开功率装置175和收缩功率装置176功率传导的同时,降低收缩功率装置176的传导结构部分的复杂性。
如图9所示,在本发明一实施例中,还包括配平导轨181、配平块182、前牵引转轴183和后牵引转轴184,容纳筒体150的末端侧壁向垂直于轴线的方向作周向扩展,形成环形配平空间185,配平空间185环绕收缩功率装置176。配平导轨181与容纳筒体150的轴线平行,在环形配平空间185中均匀设置配平导轨181,配平导轨181上设置可滑动的配平块182,沿配平导轨181在配平块182的两侧分别布设前牵引转轴183和后牵引转轴184,设置前牵引导线和后牵引导线,前牵引导线的一端固连在配平块182前端另一端环绕前牵引转轴183后固连在收缩功率装置176的滑动转盘180的侧壁上,后牵引导线的一端固连在配平块182后端另一端环绕后牵引转轴184后固连在收缩功率装置176的滑动转盘180的侧壁上。
配平块182形成的配平结构可以充分适应传感器承载链接臂118在搭载较大传感器负荷进行张开-收缩动作时对支撑转轴形成的不平衡力矩,有效改善俯仰角度调节机构的输出轴转动负荷。
在本发明一实施例中针对环境空间的信号采样需求形成智能巡检机器人的一种专业传感器采样布设方案。在端头适配法兰盘体117中心布设靶向激光甲烷检测仪的激光输出光路和光信号接收透镜,同时,在激光输出光路一侧设置可见光摄像头在相对一侧设置红外摄像头。利用可见光摄像头和红外摄像头形成传感器综合布设机构115的环境信号采集焦点。
环绕联动机电容纳筒体116设置长短两组传感器承载链接臂118,每组包括3个传感器承载链接臂118,两组传感器承载链接臂118均匀间隔设置,长传感器承载链接臂118包括六个顺序的定位端面131和一个末端的反向定位端面134,短传感器承载链接臂118包括三个顺序的定位端面131和一个末端的反向定位端面134,(同一和不同)传感器承载链接臂118的定位端面131间间距一致,(不同)传感器承载链接臂118上的反向定位端面134与相邻的定位端面131的间距一致。
以固定随动圆环122为起始端,在短组传感器承载链接臂118上在第二个定位端面131上固定红外焦平面温度传感器,在长组传感器承载链接臂118上在第六个定位端面131上固定红外焦平面温度传感器。通过传感器沿传感器承载链接臂轴向的分布设置获取环境空间中较广泛的温度变化信息和环境空间中沿传感器承载链接臂轴向的温度变化。
在长组传感器承载链接臂118上在第五个定位端面131上固定可见光摄像头,在短组传感器承载链接臂118上在第一个定位端面131上固定可见光摄像头。利用摄像头的可视角度形成视角部分重叠,采集环境空间中完整的视频信息,利用摄像头间产生的视差形成多描述维度的立体视觉特征。
在长组传感器承载链接臂118上在第一个定位端面131上和反向定位端面134上固定激光测距仪。激光测距仪再采集方式向上的相反特征,保证了随传感器承载链接臂开合时同步获得更宽泛采集视角内的距离信号。
在短组传感器承载链接臂118上在第三个定位端面131上固定激光测距仪。结合长组传感器承载链接臂118上的形成近场测量精度和原唱测量精度的匹配。
在长组传感器承载链接臂118上在第四个定位端面131上固定泄漏气体检测传感器,在短组传感器承载链接臂118上在反向定位端面134上固定泄漏气体检测传感器。检测传感器可以选取气体浓度探测类型,利用传感器承载链接臂118的开合形成沿轴向或径向的浓度渐变检测。
在长组传感器承载链接臂118上在第二个定位端面131上固定补光灯,在第三个定位端面131上固定红外摄像头。红外摄像头和补光灯的应用保证了低照度下取景的清晰度和影像合成精度。
通过上述传感器布设结构,可以形成以环境信号采集焦点为原点的燃气泄露范围采集空间、可见光影像采集空间、红外影像采集空间、周围环境激光建模空间和温度变化采集空间,各类型采集空间彼此存在复合区域,可以有效形成较大尺度空间内的综合信号采集环境,获取环境信号采集焦点为中心的环境空间完整描述维度的采集数据。同时,在受控调节传感器承载链接臂118的开合角度时,可以将综合信号采集环境的各类型采集焦点和空间容积进行受控变化,充分对不对实体资源差异化的本体特征和环境特征做完成采集,实现多样性维度数据的现场高效精准采集。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
- 一种燃气管网智能巡检方法与系统
- 一种城市燃气管网智能巡检系统及其方法