物体检测装置以及物体检测方法
文献发布时间:2023-06-19 11:55:48
相关申请的交叉引用
本申请基于在2018年12月4日申请的日本专利申请号2018-227571号,并在此通过参照引用其记载内容。
技术领域
本公开涉及物体检测装置,该物体检测装置通过搭载于移动体来检测存在于该移动体的外侧的物体。另外,本公开涉及检测存在于移动体的外侧的物体的物体检测方法。
背景技术
专利文献1中记载的物体检测装置通过使用多个测距传感器的三角测量,来计算作为移动体的车辆与物体的相对位置。具体而言,该物体检测装置具备:第一检测单元、第二检测单元、位置计算单元以及无效化单元。第一检测单元通过直接波来检测物体。所谓的直接波是发送探测波的测距传感器与接收该探测波的被物体反射的反射波作为接收波的测距传感器为同一传感器的情况下的该接收波。第二检测单元通过间接波来检测物体。所谓的间接波是发送探测波的测距传感器与接收该探测波的被物体反射的反射波作为接收波的测距传感器为不同的传感器的情况下的该接收波。位置计算单元基于第一检测单元以及第二检测单元的检测结果,通过三角测量原理来计算物体的位置信息。无效化单元基于直接波的检测范围与间接波的检测范围重叠的重叠检测范围与由位置计算单元计算出的位置信息的位置关系,来将该位置信息设为无效。
可以通过使用两个测距传感器的三角测量进行物体检测的范围为直接波的检测范围与间接波的检测范围重叠的重叠检测范围。因此,若根据三角测量原理运算出的物体的位置信息正确,则物体的位置信息的运算结果应处于重叠检测范围内。着眼于该点,在专利文献1所记载的构成中,基于根据三角测量原理运算出的物体的位置信息与重叠检测范围的位置关系,来将该位置信息设为无效。根据这样的构成,能够抑制物体的误检测。
专利文献1:日本特开2016-80641号公报
在基于如上述那样的使用多个测距传感器中的两个测距传感器的三角测量的物体位置检测中,与使用多个测距传感器中的特定的一个测距传感器的距离检测相比,检测范围变窄。特别是,根据物体检测的用途或者场景,例如,存在优选即使物体的相对位置从三角测量成立的位置移动到不成立的位置,也继续良好地检测该物体的情况。
发明内容
本公开是鉴于上述例示出的情况而完成的。即,本公开例如提供可以比以往良好地进行三角测量不成立的情况下的物体检测的物体检测装置以及物体检测方法。
物体检测装置构成为通过搭载于搭载有多个测距传感器的移动体,来检测存在于该移动体的外侧的物体。上述测距传感器构成为通过朝向上述移动体的外侧发送探测波,并且接收包含上述探测波的被上述物体反射的反射波的接收波,来输出与距上述移动体的周围的上述物体的距离对应的测距信息。
根据本公开的一个观点,物体检测装置具备:
物体位置获取部,在一并接收到直接波和间接波双方的情况下,通过使用基于上述直接波的上述测距信息和基于上述间接波的上述测距信息的三角测量原理来获取上述物体与上述移动体的相对位置,其中,上述直接波是作为多个上述测距传感器中的一个测距传感器的第一测距传感器中的上述接收波,并由从该第一测距传感器发送出的上述探测波的上述反射波引起,上述间接波是作为多个上述测距传感器中的另一个测距传感器的第二测距传感器中的上述接收波,并由从上述第一测距传感器发送出的上述探测波的上述反射波引起;以及
物体位置推断部,在仅接收上述直接波和上述间接波中的一方作为上述接收波,并且该接收波是被上述相对位置由上述物体位置获取部获取完毕的上述物体反射的上述反射波的情况下,基于获取完毕的上述相对位置亦即基准位置来推断上述相对位置。
根据本公开的另一个观点,物体检测方法包含以下的步骤。
在一并接收到直接波和间接波双方的情况下,通过使用基于上述直接波的上述测距信息和基于上述间接波的上述测距信息的三角测量原理来获取上述物体与上述移动体的相对位置,其中,上述直接波是作为多个上述测距传感器中的一个测距传感器的第一测距传感器中的上述接收波,并由从该第一测距传感器发送出的上述探测波的上述反射波引起,上述间接波是作为多个上述测距传感器中的另一个测距传感器的第二测距传感器中的上述接收波,并由从上述第一测距传感器发送出的上述探测波的上述反射波引起;以及
在仅接收上述直接波和上述间接波中的一方作为上述接收波,并且该接收波是被上述相对位置获取完毕的上述物体反射的上述反射波的情况下,基于获取完毕的上述相对位置亦即基准位置来推断上述相对位置。
在上述构成中,在执行使用上述第一测距传感器和上述第二测距传感器的物体检测动作时,存在一并接收上述直接波和上述间接波双方的情况。在该情况下,上述物体位置获取部通过使用基于上述直接波的上述测距信息和基于上述间接波的上述测距信息的三角测量原理,来获取上述物体与上述移动体的上述相对位置。
另一方面,在执行上述物体检测动作时,存在三角测量不成立的情况。在该情况下,无法通过三角测量原理来获取上述物体与上述移动体的上述相对位置。但是,在该情况下,也存在接收上述直接波和上述间接波中的一方作为上述接收波的情况。若这样的接收波基于被上述相对位置获取完毕的上述物体反射的上述反射波,则该物体存在于获取完毕的上述相对位置的附近的可能性较高。
因此,在即使三角测量不成立,但以下的条件成立的情况下,上述物体位置推断部也基于获取完毕的上述相对位置亦即基准位置来推断上述相对位置。
条件1:接收上述直接波和上述间接波中的一方作为上述接收波。
条件2:该接收波是被上述相对位置由上述物体位置获取部获取完毕的上述物体反射的上述反射波。
同样地,上述方法在三角测量成立的情况下,通过使用基于上述直接波的上述测距信息和基于上述间接波的上述测距信息的三角测量原理,来获取上述物体与上述移动体的上述相对位置。另一方面,上述方法在即使三角测量不成立,但上述的条件成立的情况下,基于获取完毕的上述相对位置亦即基准位置来推断上述相对位置。
这样,根据上述构成以及上述方法,在即使三角测量不成立,该物体存在于获取完毕的上述相对位置的附近的可能性较高的情况下,可良好地进行物体检测即上述相对位置的推断。因此,能够比以往良好地进行三角测量不成立的情况下的物体检测。
此外,在申请文件中,存在对各要素标注带括号的参照附图标记的情况。然而,即使在该情况下,这样的参照附图标记也只不过表示各要素与后述的实施方式中记载的具体单元的对应关系的一个例子。因此,本公开并不受上述的参照附图标记的记载任何限定。
附图说明
图1是表示搭载有实施方式所涉及的物体检测装置的车辆的示意构成的俯视图。
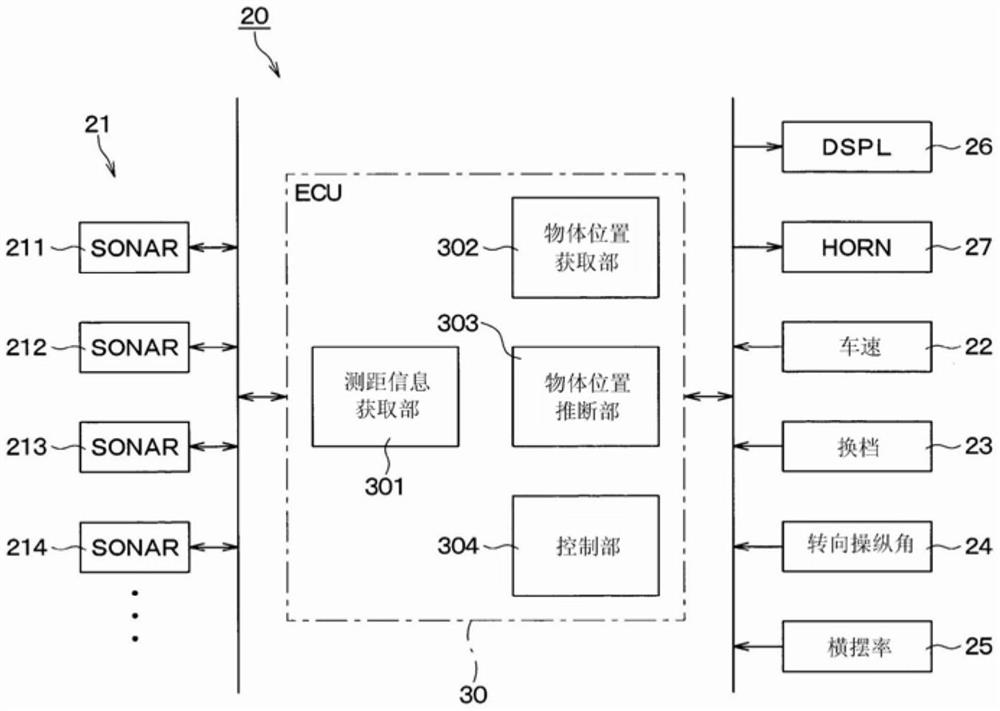
图2是表示图1所示的物体检测装置的示意性的功能构成的框图。
图3是表示图2所示的物体检测装置的动作例的概念图。
图4是表示图2所示的物体检测装置的动作例的流程图。
图5是表示图2所示的物体检测装置的动作例的流程图。
具体实施方式
以下,基于附图对本公开的实施方式进行说明。此外,对于可对实施方式应用的各种变形例,若插入至有关该实施方式的一系列的说明的中途则存在妨碍该实施方式的理解的可能,所以集中记载在该实施方式的说明之后。
(构成)
若参照图1,则作为移动体的车辆10是所谓的四轮汽车,在俯视时具备大致矩形的车体11。以下,将在俯视时通过车辆10的车宽度方向上的中心且与车辆10的车辆全长方向平行的虚拟直线称为车辆中心线LC。车辆全长方向是与车宽度方向正交并且与车高方向正交的方向。车高方向是规定车辆10的车高度的方向,并是与将车辆10载置于水平面的情况下的重力作用方向平行的方向。在图1中,车辆全长方向是图中上下方向,车宽度方向是图中左右方向。
如图1中用箭头表示的那样定义车辆10中的“前”“后”“左”“右”。即,车辆全长方向与前后方向同义。另外,车宽度方向与左右方向同义。“俯视”时的各部的形状是指以与车高方向平行的视线从车辆10的上方观察该各部的情况下的形状。
在车体11的前侧的端部安装有前保险杠12。在车体11的后侧的端部安装有后保险杠13。在车体11的侧面部安装有门板14。在图1所示的具体例中,在左右分别设置有两片门板14,合计设置有四片门板14。在前侧的左右一对门板14中的每片门板上安装有后视镜15。
在车辆10搭载有物体检测装置20。以下,有将搭载有本实施方式所涉及的物体检测装置20的车辆10称为“本车辆”的情况。物体检测装置20构成为通过搭载于本车辆来检测存在于本车辆的外侧的物体B。具体而言,物体检测装置20具备:测距传感器21、车速传感器22、换档位置传感器23、转向操纵角传感器24、横摆率传感器25、显示部26、警报声产生部27以及电子控制装置30。此外,为了图示的简单化,在图1中适当地省略了构成物体检测装置20的各部之间的电连接关系。
测距传感器21设置为通过朝向本车辆的外侧发送探测波,并且接收包含该探测波的被物体B反射的反射波的接收波,来输出测距信息。测距信息是测距传感器21的输出信号所包含的信息,且测距信息是与距本车辆的周围的物体B的距离对应的信息。在本实施方式中,测距传感器21是所谓的超声波传感器,构成为发出作为超声波的探测波,并且能够接收包含超声波的接收波。
物体检测装置20具备多个测距传感器21。即,在车辆10中搭载有多个测距传感器21。在俯视时,多个测距传感器21分别设置在相互不同的位置。另外,在本实施方式中,多个测距传感器21分别从车辆中心线LC向车宽度方向上的任意一方侧偏移地配置。
具体而言,在本实施方式中,在前保险杠12安装有作为测距传感器21的第一前声纳211A、第二前声纳211B、第三前声纳211C以及第四前声纳211D。同样地,在后保险杠13安装有作为测距传感器21的第一后声纳212A、第二后声纳212B、第三后声纳212C以及第四后声纳212D。另外,在车体11的侧面部安装有第一侧声纳213A、第二侧声纳213B、第三侧声纳213C以及第四侧声纳213D。在以下的说明中,在未确定是上述的第一前声纳211A等中的哪一个的情况下,使用“测距传感器21”这样的表现。
将多个测距传感器21中的一个测距传感器称为“第一测距传感器”,将其他的测距传感器称为“第二测距传感器”,并如以下那样定义“直接波”以及“间接波”。将第一测距传感器中的接收波且是由从第一测距传感器发送出的探测波的被物体B反射的反射波引起的接收波称为“直接波”。典型地,直接波是第一测距传感器接收到从第一测距传感器发送出的探测波的被物体B反射的反射波作为接收波时的该接收波。即,直接波是发送探测波的测距传感器21与接收该探测波的被物体B发射的反射波作为接收波的测距传感器21是同一测距传感器的情况下的该接收波。与此相对,将第二测距传感器中的接收波且是由从第一测距传感器发送出的探测波的被物体B反射的反射波引起的接收波称为“间接波”。典型地,间接波是第二测距传感器接收从第一测距传感器发送出的探测波的被物体B反射的反射波作为接收波时的该接收波。即,所谓的间接波是发送探测波的测距传感器21与接收该探测波的被物体反射的反射波作为接收波的测距传感器21不同的情况下的该接收波。
在图1中,以第三前声纳211C以及第四前声纳211D为例,示出两个测距传感器21中的直接波区域RD以及间接波区域RI。直接波区域RD是在存在物体B的情况下能够接收由该物体B引起的直接波的区域。间接波区域RI是存在物体B的情况下,可接受由该物体B引起的间接波的区域。具体而言,间接波区域RI虽然与两个测距传感器21中的直接波区域RD彼此重叠的区域不完全一致,但大部分重叠。以下,为了简化说明,将间接波区域RI视为与两个测距传感器21中的直接波区域RD彼此重叠的区域几乎一致。
第一前声纳211A设置在前保险杠12的前侧表面上的左端部,以向本车辆的左前方发出探测波。第二前声纳211B设置在前保险杠12的前侧表面上的右端部,以向本车辆的右前方发出探测波。第一前声纳211A和第二前声纳211B隔着车辆中心线LC对称地配置。
第三前声纳211C以及第四前声纳211D在靠近前保险杠12的前侧表面上的中央的位置沿车宽度方向排列。第三前声纳211C在车宽度方向上配置在第一前声纳211A与车辆中心线LC之间,以向本车辆的大致前方发出探测波。第四前声纳211D在车宽度方向上配置在第二前声纳211B与车辆中心线LC之间,以向本车辆的大致前方发出探测波。第三前声纳211C和第四前声纳211D隔着车辆中心线LC对称地配置。
如上所述,在俯视时,第一前声纳211A和第三前声纳211C配置在相互不同的位置。另外,在车宽度方向上相互邻接的第一前声纳211A和第三前声纳211C相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
即,第一前声纳211A配置成能够接收与自己发送出的探测波对应的直接波和与第三前声纳211C发送出的探测波对应的间接波双方。同样地,第三前声纳211C配置成能够接收与自己发送出的探测波对应的直接波和与第一前声纳211A发送出的探测波对应的间接波双方。
同样地,在俯视时,第三前声纳211C和第四前声纳211D配置在相互不同的位置。另外,在车宽度方向上相互邻接的第三前声纳211C和第四前声纳211D相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
同样地,在俯视时,第二前声纳211B和第四前声纳211D配置在相互不同的位置。另外,在车宽度方向上相互邻接的第二前声纳211B和第四前声纳211D相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
第一后声纳212A设置在后保险杠13的后侧表面上的左端部,以向本车辆的左后方发出探测波。第二后声纳212B设置在后保险杠13的后侧表面上的右端部,以向本车辆的右后方发出探测波。第一后声纳212A和第二后声纳212B隔着车辆中心线LC对称地配置。
第三后声纳212C以及第四后声纳212D在靠近后保险杠13的后侧表面上的中央的位置沿车宽度方向排列。第三后声纳212C在车宽度方向上配置在第一后声纳212A与车辆中心线LC之间,以向本车辆的大致后方发出探测波。第四后声纳212D在车宽度方向上配置在第二后声纳212B与车辆中心线LC之间,以向本车辆的大致后方发出探测波。第三后声纳212C和第四后声纳212D隔着车辆中心线LC对称地配置。
如上所述,在俯视时,第一后声纳212A和第三后声纳212C配置在相互不同的位置。另外,在车宽度方向上相互邻接的第一后声纳212A和第三后声纳212C相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
即,第一后声纳212A配置为能够接收与自己发送出的探测波对应的直接波和与第三后声纳212C发送出的探测波对应的间接波双方。同样地,第三后声纳212C配置为能够接收与自己发送出的探测波对应的直接波和与第一后声纳212A发送出的探测波对应的间接波双方。
同样地,在俯视时,第三后声纳212C和第四后声纳212D配置在相互不同的位置。另外,在车宽度方向上相互邻接的第三后声纳212C和第四后声纳212D相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
同样地,在俯视时,第二后声纳212B和第四后声纳212D配置在相互不同的位置。另外,在车宽度方向上相互邻接的第二后声纳212B和第四后声纳212D相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
第一侧声纳213A、第二侧声纳213B、第三侧声纳213C以及第四侧声纳213D设置为从车体11的侧面向本车辆的侧方发出探测波。第一侧声纳213A以及第二侧声纳213B安装于车体11的前侧部分。第一侧声纳213A和第二侧声纳213B隔着车辆中心线LC对称地配置。第三侧声纳213C以及第四侧声纳213D安装于车体11的后侧部分。第三侧声纳213C和第四侧声纳213D隔着车辆中心线LC对称地配置。
第一侧声纳213A在前后方向上配置于第一前声纳211A与左侧的后视镜15之间,以向本车辆的左方发出探测波。第一侧声纳213A与第一前声纳211A之间相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
第二侧声纳213B在前后方向上配置于第二前声纳211B与右侧的后视镜15之间,以向本车辆的右方发出探测波。第二侧声纳213B与第二前声纳211B之间相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
第三侧声纳213C在前后方向上配置于第一后声纳212A与左后侧的门板14之间,以向本车辆的左方发出探测波。第三侧声纳213C与第一后声纳212A之间相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
第四侧声纳213D在前后方向上配置于第二后声纳212B与右后侧的门板14之间,以向本车辆的右方发出探测波。第四侧声纳213D与第二后声纳212B之间相互设置成一方发送出的探测波的被物体B反射的反射波能够作为另一方中的接收波接收的位置关系。
多个测距传感器21分别与电子控制装置30电连接。即,多个测距传感器21分别设置为在电子控制装置30的控制下收发超声波。另外,多个测距传感器21分别产生与接收波的接收结果对应的输出信号,并发送至电子控制装置30。
车速传感器22、换档位置传感器23、转向操纵角传感器24以及横摆率传感器25与电子控制装置30电连接。车速传感器22设置为产生与本车辆的行驶速度对应的信号,并发送至电子控制装置30。以下,将本车辆的行驶速度仅称为“车速”。换档位置传感器23设置为产生与本车辆的换挡位置对应的信号,并发送至电子控制装置30。转向操纵角传感器24设置为产生与本车辆的转向操纵角对应的信号,并发送至电子控制装置30。横摆率传感器25设置为产生与作用于本车辆的横摆率对应的信号,并发送至电子控制装置30。
显示部26以及警报声产生部27配置于车辆10的车厢内。显示部26与电子控制装置30电连接,以在电子控制装置30的控制下进行与物体检测动作相伴的显示。警报声产生部27与电子控制装置30电连接,以在电子控制装置30的控制下产生与物体检测动作相伴的警报音。
电子控制装置30配置于车体11的内侧。电子控制装置30构成为基于从多个测距传感器21中的每一个、车速传感器22、换档位置传感器23、转向操纵角传感器24以及横摆率传感器25等接收的信号以及信息,来执行物体检测动作。
在本实施方式中,电子控制装置30是所谓的车载微型计算机,具备未图示的CPU、ROM、RAM、非易失性RAM等。非易失性RAM例如是闪存ROM等。以下,将电子控制装置30的CPU、ROM、RAM以及非易失性RAM仅简称为“CPU”、“ROM”、“RAM”以及“非易失性RAM”。
电子控制装置30构成为CPU从ROM或者非易失性RAM读出程序并执行,而能够实现各种控制动作。该程序包含与后述的各程序对应的步骤。另外,ROM或者非易失性RAM中预先储存有执行程序时所使用的各种数据。各种数据例如包含初始值、检查表、映射等。
如图2所示,作为功能上的构成,电子控制装置30具备测距信息获取部301、物体位置获取部302、物体位置推断部303以及控制部304。以下,对图2所示的电子控制装置30的功能构成进行说明。
测距信息获取部301设置为获取从多个测距传感器21中的每一个输出的测距信息。即,测距信息获取部301在规定期间按时间序列临时储存从多个测距传感器21中的每一个接收到的测距信息。
物体位置获取部302设置为在一并接收直接波和间接波双方且三角测量成立的情况下,获取物体B与本车辆的相对位置。即,物体位置获取部302通过使用基于直接波的测距信息和基于间接波的测距信息的三角测量原理,来获取物体B与本车辆的相对位置。以下,将物体B与本车辆的相对位置称为“物体B的位置”或仅称为“位置”。对于物体位置获取部302的动作的详细内容后述。
物体位置推断部303设置为即使三角测量不成立,但下述的条件1和条件2双方成立的情况下,基于基准位置来推断物体B的位置。“基准位置”是通过物体位置获取部302获取完毕、或者通过物体位置推断部303推断完毕的物体B的位置。此外,在本实施方式中,基准位置不包含与暂时丢失的物体B对应的位置。典型地,基准位置是通过物体位置获取部302获取完毕、或通过物体位置推断部303推断完毕的物体B的位置中的有效(即丢失前)并且最新的位置。另外,条件2中的“物体B”中不包含暂时丢失的物体B。对于物体位置推断部303的动作的详细内容后述。
条件1:接收直接波和间接波中的一方作为接收波。
条件2:该接收波是被位置获取完毕或位置推断完毕的物体B反射的反射波。
控制部304设置为控制物体检测装置20的整体动作。即,控制部304控制多个测距传感器21中的每一个的收发时机。另外,控制部304根据直接波以及间接波的接收状态,使物体位置获取部302以及物体位置推断部303选择性地动作。并且,控制部304根据物体位置获取部302的获取结果以及物体位置推断部303的推断结果,来使显示部26和/或警报声产生部27动作。
(动作概要)
以下,使用具体的动作例对物体检测装置20的动作概要进行说明。
电子控制装置30基于车速传感器22、换档位置传感器23、转向操纵角传感器24、横摆率传感器25等的输出,来获取车辆移动状态。车辆移动状态是由车速传感器22、换档位置传感器23、转向操纵角传感器24以及横摆率传感器25获取到的本车辆的移动状态。车辆移动状态也可以称为“行驶状态”。车辆移动状态也包含停车状态,即车速为0km/h的状态。车辆移动状态包含本车辆的行进方向以及行进速度。以下,将本车辆的行进方向称为“车辆行进方向”。车辆移动状态对应于多个测距传感器21中的每一个的移动状态。
电子控制装置30从物体检测装置20的动作条件成立的时刻起以规定时间间隔判定规定的传感器组合中的物体检测时机的到达。“动作条件”例如包含车速为规定范围内等。
“规定的传感器组合”是选择多个测距传感器21中的一个测距传感器21作为第一测距传感器的情况下的该第一测距传感器和可以成为第二测距传感器的其它至少一个测距传感器21的组合。具体而言,例如,假设选择了第三前声纳211C作为第一测距传感器的情况。在该情况下,“规定的传感器组合”包含作为第一测距传感器的第三前声纳211C和可以成为第二测距传感器的其它多个测距传感器21。“其它多个测距传感器21”是第一前声纳211A、第二侧声纳213B以及第四前声纳211D。“规定的传感器组合”也可以称为“规定的第一测距传感器的选择”。
所谓的“物体检测时机”是使用规定的传感器组合来获取或推断物体B的位置的特定的时刻。即,物体检测时机是用于检测物体B的后述的程序的起动时刻。
对于规定的传感器组合的每一个而言,物体检测时机在物体检测装置20的动作条件成立后,以规定时间T(例如200msec)间隔到达。即,电子控制装置30以规定时间T周期从多个测距传感器21中依次选择第一测距传感器,执行由选择出的第一测距传感器进行的探测波的发出、和直接波以及间接波的接收。因此,若将可以成为第一测距传感器的测距传感器21的个数设为M,则在物体检测装置20中,物体检测时机每隔T/M到达。
若物体检测时机到达,则电子控制装置30执行物体检测动作。具体而言,电子控制装置30选择多个测距传感器21中的规定的一个测距传感器21作为第一测距传感器,从选择出的第一测距传感器发出探测波。另外,电子控制装置30控制多个测距传感器21中的每个测距传感器21的动作,并从多个测距传感器21中的每个测距传感器21接收包含测距信息的输出信号。于是,测距信息获取部301获取从多个测距传感器21中的每个测距传感器21输出的测距信息。即,测距信息获取部301在规定期间按时间序列临时储存从多个测距传感器21中的每个测距传感器21接收的测距信息。而且,电子控制装置30基于测距信息获取部301对测距信息的获取结果来检测物体B。
在执行使用第一测距传感器和第二测距传感器的物体检测动作时,存在一并接收直接波和间接波双方的情况。在该情况下,物体位置获取部302通过使用基于直接波的测距信息和基于间接波的测距信息的三角测量原理来获取物体B的位置。此外,该情况下的所谓的“接收”是指接收到能够有效地获取测距信息的程度。因此,无法有效地获取测距信息的程度的较弱的接收强度的接收不视为这里所说的“接收”。因此,这里所说的“接收”可以换句话说是“阈值强度以上的接收”和/或“有效的接收”。或者,这里所说的“接收”可以换句话说是“良好的接收”。
另一方面,在执行物体检测动作时,存在三角测量不成立的情况。在该情况下,无法通过三角测量原理获取物体B的位置。但是,在该情况下,存在接收直接波和间接波中的一方作为接收波的情况。具体而言,可能存在未良好地接收间接波而良好地接收直接波的情况。或者,可能存在未良好地接收直接波而良好地接收间接波的情况。若这样的接收波是被位置获取完毕的物体B反射的反射波,则物体B存在于获取完毕的位置的附近的可能性较高。此外,该情况下的“接收”的意义也与上述相同。
参照图1,对将第三前声纳211C设为第一测距传感器的情况的例子进行说明。图1中的物体B的位置表示第(K-1)次的物体检测时机下的位置。K是2以上的自然数。另外,本车辆在倒挡以外的换挡位置以低速行驶中,物体B是静止物。在本例中,在第(K-1)次的物体检测时机,物体B存在于基于第三前声纳211C和第四前声纳211D的间接波区域RI中的外缘附近。
在该情况下,在第(K-1)次的物体检测时机,基于第三前声纳211C和第四前声纳211D的三角测量成立。因此,在第(K-1)次的物体检测时机,物体B的位置由物体位置获取部302获取。
在从图1所示的状态到将第三前声纳211C设为第一测距传感器的下次的物体检测时机为止的期间,由于本车辆的移动,该物体B的位置发生变化。而且,假设在第K次的物体检测时机,该物体B的位置移到间接波区域RI外,而成为基于第三前声纳211C的直接波区域RD内的情况。
在第K次的物体检测时机,三角测量不成立。然而,在第(K-1)次的物体检测时机来自位置获取完毕的物体B的反射波能够作为直接波由第三前声纳211C接收。因此,在第K次的物体检测时机,若直接波被第三前声纳211C接收,则物体B存在于获取完毕的位置的附近的可能性较高。此时,在第(K-1)次的物体检测时机位置获取完毕的物体B和与在第K次的物体检测时机接收到的直接波对应的物体B相同。同样地,在第(K+1)次的物体检测时机,若直接波也被第三前声纳211C接收,则物体B存在于获取完毕的位置的附近的可能性较高。
因此,在三角测量不成立,但以下的条件成立的情况下,物体位置推断部303基于基准位置来推断物体B的位置。
条件1:接收直接波和间接波中的一方作为接收波。
条件2:该接收波是被位置获取完毕或位置推断完毕的物体B反射的反射波。
在本实施方式中,物体位置推断部303基于基准位置和与接收波对应的测距信息来推断物体B的位置。即,在仅接收到直接波的情况下,物体位置推断部303基于基准位置和与直接波对应的测距信息亦即直接波距离,来推断物体B的位置。另一方面,在仅接收到间接波的情况下,物体位置推断部303基于基准位置和与间接波对应的测距信息亦即间接波距离,来推断物体B的位置。具体而言,物体位置推断部303基于来自第一测距传感器的基准位置的方位和与接收波对应的测距信息,来推断物体B的位置。方位是在俯视时以第一测距传感器为基准的物体B所存在的方向。
图3示意性地表示方位θ的概念以及由物体位置推断部303进行的物体B的位置的推断方法。在图3的例子中,第一测距传感器是第三前声纳211C。物体位置BP表示物体B的位置的获取结果或推断结果。DD表示直接波距离。(K-1)表示第(K-1)次的物体检测时机。(K)表示第K次的物体检测时机。在本实施方式中,方位θ是以基准线LH为基准的物体位置BP的方位角。基准线LH是在俯视时通过第一测距传感器并且与车辆中心线LC正交的虚拟直线。即,在俯视时,在物体B比第一测距传感器靠右侧并且存在于基准线LH上的情况下,物体B的方位为0度。另一方面,在俯视时,在物体B比第一测距传感器靠左侧并且存在于基准线LH上的情况下,物体B的方位为180度。另外,在俯视时,在物体B存在于通过第一测距传感器并且与车辆中心线LC平行的虚拟直线上的情况下,物体B的方位为90度。
若参照图3,在本实施方式中,物体位置推断部303基于与第(K-1)次的物体检测时机对应的方位θ(K-1)和车辆移动状态,来推断与第K次的物体检测时机对应的方位θ(K)。另外,物体位置推断部303获取与第K次的物体检测时机对应的直接波距离DD(K)。而且,物体位置推断部303计算通过第一测距传感器的方位θ(K)的虚拟直线与以第一测距传感器为中心的半径DD(K)的交点,作为物体位置BP(K)的推断结果。
另外,在与基准位置对应的测距信息和与接收波对应的测距信息之差为规定值以内的情况下,物体位置推断部303推断相对位置。另一方面,在与基准位置对应的测距信息和与接收波对应的测距信息之差超过规定值的情况下,物体位置推断部303不推断相对位置。即,在该情况下,禁止由物体位置推断部303进行的物体B的位置的推断。并且,在与基准位置对应的测距信息和与接收波对应的测距信息之差超过规定值的情况下,控制部304将获取以及推断出的物体B的位置无效化。
像这样,本实施方式的装置以及方法不会在三角测量不成立的情况下也无条件地推断物体B的位置。即,在本实施方式中,即使三角测量不成立,在被位置获取完毕或位置推断完毕的物体B反射的反射波作为直接波和间接波中的一方被接收的情况下,推断物体B的位置。另外,本实施方式的装置以及方法在推断物体B的位置时使用与作为直接波和间接波中的一方接收到的接收波对应的测距信息。因此,根据本实施方式,即使三角测量不成立,在物体B存在于获取完毕的位置的附近的可能性较高的情况下,可良好地进行物体B的检测即位置的推断。因此,能够比以往良好地进行三角测量不成立的情况下的物体检测。具体而言,例如,与以往相比提高相对于车辆行进方向以较浅的角度倾斜的墙或邻接车辆的识别性。
(具体例)
以下,使用图4以及图5的流程图对本实施方式的构成的具体动作例进行说明。在图4以及图5的流程图中,“S”是对“步骤”的缩写。
图4所示的物体检测程序在从物体检测装置20的动作条件不成立切换到成立的时刻首次起动,之后,每当物体检测时机到达就反复起动,直到物体检测装置20的动作条件不成立为止。
例如,若最初的物体检测时机到达,则CPU选择第一前声纳211A作为第一测距传感器,起动并执行图4所示的物体检测程序。若下一个物体检测时机到达,则CPU选择第二前声纳211B作为第一测距传感器,起动并执行图4所示的物体检测程序。若再下一个物体检测时机到达,则CPU选择第三前声纳211C作为第一测距传感器,起动并执行图4所示的物体检测程序。这样,在规定时间T(例如200msec)内,可选择为第一测距传感器的M个测距传感器21分别各被选择一次。
通过从最初的物体检测时机的到达经过规定时间T,从而将第一前声纳211A设为第一测距传感器的物体检测时机再次到达。于是,CPU再次选择第一前声纳211A作为第一测距传感器,起动并执行图4所示的物体检测程序。若再下一个物体检测时机到达,则CPU再次选择第二前声纳211B作为第一测距传感器,起动并执行图4所示的物体检测程序。以下同样地,CPU依次变更第一测距传感器,并反复起动并执行图4所示的物体检测程序,直到物体检测装置20的动作条件不成立为止。
若图4所示的物体检测程序起动,则首先,在步骤41中,CPU判定是否一并接收到直接波WD和间接波WI双方。在一并接收到直接波WD和间接波WI双方的情况下(即步骤41=是),CPU依次执行步骤42~步骤45的处理。步骤41的处理相当于控制部304的动作。
在步骤42中,CPU获取与本次接收的直接波WD对应的直接波距离DD。在步骤43中,CPU获取与本次接收的间接波WI对应的间接波距离DI。在步骤44中,CPU基于本次获取的直接波距离DD以及间接波距离DI来获取物体位置BP。此外,在步骤42~步骤44中的获取物体位置BP时,也可以适当地考虑车速、横摆率等车辆移动状态。步骤42~步骤44的处理相当于物体位置获取部302的动作。
在步骤45中,CPU判定通过本次步骤44的处理获取的物体位置BP是否是间接波区域RI内。在获取的物体位置BP是间接波区域RI内的情况下(即,步骤45=是),CPU依次执行步骤46~步骤48的处理,之后暂时结束本程序。步骤45的处理相当于物体位置获取部302的动作。
在步骤46中,CPU重置推断次数计数器N(即N=0)。在步骤47中,CPU利用通过本次步骤44的处理获取的物体位置BP更新最新的物体B的位置。在步骤48中,CPU计算更新后的物体位置BP中的方位θ,并且利用计算结果更新最新的方位θ的值。步骤46的处理相当于控制部304的动作。步骤47以及步骤48的处理相当于物体位置获取部302的动作。
在一并接收到直接波WD和间接波WI双方这样的条件不成立的情况下(即,步骤41=否),CPU使处理进入图5中的步骤501。在通过本次步骤44的处理获取的物体位置BP为间接波区域RI外的情况下(即,步骤45=否)也相同。
在步骤501中,CPU对推断次数计数器N自加1。即,CPU对推断次数计数器N加上1。在步骤502中,CPU判定推断次数计数器N是否小于计数器阈值THN。在本具体例中,计数器阈值THN是2以上的自然数。步骤501以及步骤502的处理相当于控制部304的动作。
在推断次数计数器N为计数器阈值THN以上的情况下(即,步骤502=否),重复规定次数由物体位置推断部303进行的物体位置BP的推断。即,在该情况下,不以规定次数连续执行由物体位置获取部302进行的物体位置BP的获取。在该情况下,即使在此基础上继续进行由物体位置推断部303进行的物体位置BP的推断,也难以获得良好的推断精度。因此,在该情况下,CPU在执行步骤503的处理之后,暂时结束本程序。
在步骤503中,CPU将获取以及推断完毕的物体位置BP无效化。由此,对应的方位θ也被无效化。步骤503的处理能够为将对丢失的物体B获取以及推断出的位置信息从储存区域中削除或消除的处理。步骤503的处理相当于控制部304的动作。储存区域也可称为存储区域。
在推断次数计数器N小于计数器阈值THN的情况下(即,步骤502=是),CPU使处理进入步骤504。在步骤504中,CPU判定是否接收到直接波WD。步骤504的处理相当于控制部304的动作。
在接收到直接波WD的情况下(即,步骤504=是),CPU在依次执行步骤505以及步骤506的处理后,使处理进入步骤507。在步骤505中,CPU获取与本次接收到的直接波WD对应的直接波距离DD。在步骤506中,CPU计算与作为基准位置的最新的物体位置BP对应的直接波距离DD和步骤505中的获取值之差ΔDD。步骤505以及步骤506的处理相当于物体位置推断部303的动作。
在步骤507中,CPU判定ΔDD是否小于规定值THD。该判定相当于被位置获取完毕或位置推断完毕的物体B反射的反射波是否作为直接波WD接收的判定。即,该判定相当于位置获取完毕或位置推断完毕的物体B和与本次接收到的直接波WD对应的物体B是否相同的判定。所谓的“与本次接收到的直接波WD对应的物体B”是通过反射成为本次接收到的直接波WD的基础的探测波而创建出该直接波WD的物体B。步骤507的处理相当于物体位置推断部303的动作。
在ΔDD小于规定值THD的情况下(即,步骤507=是),CPU依次执行步骤508以及步骤509的处理,之后暂时结束本程序。另一方面,在ΔDD为规定值THD以上的情况下(即,步骤507=否),CPU跳过步骤508以及步骤509的处理,暂时结束本程序。
在步骤508中,CPU基于本次获取的直接波距离DD和最新的方位θ来推断物体位置BP。物体位置BP的推断方法的详细内容如上所述。另外,CPU通过本次推断出的物体位置BP来更新最新的物体B的位置。在步骤509中,CPU计算更新后的物体位置BP中的方位θ,并且利用计算结果更新最新的方位θ的值。步骤508以及步骤509的处理相当于物体位置推断部303的动作。此外,在进行步骤505~步骤508的处理时,也可以适当地考虑车速、横摆率等车辆移动状态。
在未接收到直接波WD的情况下(即,步骤504=否),CPU使处理进入步骤510。在步骤510中,CPU判定是否接收到间接波WI。步骤510的处理相当于控制部304的动作。
在接收到间接波WI的情况下(即,步骤510=是),CPU在依次执行步骤511以及步骤512的处理后,使处理进入步骤507。另一方面,在既未接收直接波WD也未接收间接波WI的情况下(即,步骤510=否),CPU跳过步骤511以下的全部处理,并暂时结束本程序。
在步骤511中,CPU获取与本次接收到的间接波WI对应的间接波距离DI。在步骤512中,CPU计算与作为基准位置的最新的物体位置BP对应的间接波距离DI和步骤511中的获取值之差ΔDI。步骤511以及步骤512的处理相当于物体位置推断部303的动作。
在步骤513中,CPU判断ΔDI是否小于规定值THI。该判定相当于是否接收到被位置获取完毕或位置推断完毕的物体B反射的反射波作为间接波WI的判定。即,该判定相当于位置获取完毕或位置推断完毕的物体B和与本次接收到的间接波WI对应的物体B是否相同的判定。“与本次接收到的间接波WI对应的物体B”是通过反射成为本次接收到的间接波WI的基础的探测波而创建出该间接波WI的物体B。步骤513的处理相当于物体位置推断部303的动作。
在ΔDI小于规定值THI的情况下(即,步骤513=是),在使处理进入步骤514之后,CPU使处理进入步骤509,之后暂时结束本程序。另一方面,在ΔDI为规定值THI以上的情况下(即,步骤513=否),CPU跳过步骤514的处理,暂时结束本程序。
在步骤514中,CPU基于本次获取的间接波距离DI和最新的方位θ来推断物体位置BP。另外,CPU通过本次推断的物体位置BP来更新最新的物体B的位置。步骤514的处理相当于物体位置推断部303的动作。此外,在进行步骤511~步骤514的处理时,也可以适当地考虑车速、横摆率等车辆移动状态。
(变形例)
本公开并不限定于上述实施方式。因此,能够对上述实施方式适当地变更。以下,对代表性的变形例进行说明。在以下的变形例的说明中,主要对与上述实施方式的不同点进行说明。另外,在上述实施方式和变形例中,对于相互相同或者等同的部分标注相同附图标记。因此,在以下的变形例的说明中,对于具有与上述实施方式相同的附图标记的构成要素,除非存在技术上的矛盾或者另外的追加说明,可以适当地引用上述实施方式中的说明。
本公开并不限定于在上述实施方式中示出的具体的装置构成。即,例如,车辆10并不限定于四轮汽车。具体而言,车辆10可以是三轮汽车,也可以是货运卡车等六轮汽车或者八轮汽车。“物体”也可以换言之为“障碍物”。即,物体检测装置也可以称为障碍物检测装置。
测距传感器21的配置以及个数并不限定于上述的具体例。即,例如,若参照图1,则在第三前声纳211C配置于车宽度方向上的中央位置的情况下,可省略第四前声纳211D。同样地,在第三后声纳212C配置于车宽度方向上的中央位置的情况下,可省略第四后声纳212D。
测距传感器21并不限定于超声波传感器。即,例如,测距传感器21也可以是激光雷达传感器或者毫米波雷达传感器。车辆移动状态的获取并不限定于使用车速传感器22、换档位置传感器23、转向操纵角传感器24以及横摆率传感器25的方式。即,例如,可省略横摆率传感器25。或者,例如,在获取车辆移动状态时,可以使用上述以外的传感器。
在上述实施方式中,电子控制装置30是CPU从ROM等读出程序并起动的构成。然而,本公开并不限定于这样的构成。即,例如,电子控制装置30也可以是构成为能够进行如上述的动作的数字电路,例如门阵列等ASIC。ASIC是APPLICATION SPECIFIC INTEGRATEDCIRCUIT(专用集成电路)的简称。
电子控制装置30可以经由车载通信网络与车速传感器22等电连接。车载通信网络依据CAN(国际注册商标)、FlexRay(国际注册商标)等车载LAN标准而构成。CAN(国际注册商标)是Controller Area Network(控制器局域网)的简称。LAN是Local Area Network(局域网)的简称。
第一侧声纳213A、第二侧声纳213B、第三侧声纳213C以及第四侧声纳213D分别也可以设置为能够仅接收直接波。或者,第一侧声纳213A、第二侧声纳213B、第三侧声纳213C以及第四侧声纳213D可以省略。
本公开并不限定于在上述实施方式中示出的具体的动作例以及处理方式。例如,上述的动作概要以及动作例对应于本车辆的前进时。然而,本公开并不限定于这样的方式。即,本公开同样也可以应用于本车辆的后退时。
典型地,第一测距传感器以及第二测距传感器是相互邻接的两个测距传感器21。然而,本公开并不限定于这样的方式。即,例如,若参照图1,则通过第二前声纳211B和第三前声纳211C,三角测量也可以成立。因此,也可能有第二前声纳211B是第一测距传感器且第三前声纳211C是第二测距传感器的情况。
基准位置也可以不包含推断完毕的相对位置,而仅包含获取完毕的相对位置。即,在上述的动作例中,也可以是步骤402中的计数器阈值THN=2。或者,计数器阈值THN也可以是3以上的尽可能小的值(例如3或4)。即,在仅接收直接波和间接波中的一方作为接收波的状态连续的情况下,物体位置推断部303也可以仅规定次数,代替获取完毕的相对位置,而使用前一次的相对位置的推断结果作为基准位置。由此,可以确保良好的物体检测精度。
在上述的具体例中,将物体B作为静止物进行了说明,但本公开并不限定于这样的方式。即,例如,在物体B是移动物的情况下,当然在上述的各处理中可考虑本车辆与物体B的相对移动的方式。
方位θ的基准也可以为车辆中心线LC。此时,在俯视时,在物体B存在于通过第一测距传感器并且与车辆中心线LC平行的虚拟直线上的情况下,物体B的方位为0度。
步骤45的处理可以省略。即,物体位置获取部302若一并接收直接波和间接波双方,则基于直接波和间接波获取的物体位置BP即使在规定范围外,也可以将获取到的物体位置BP有效化。
对于位置获取完毕或位置推断完毕的物体B和与本次接收到的直接波WD对应的物体B是否相同的判定方法,并不限定于如上述的具体例那样的基于距离差(即ΔDD等)的方法。即,在进行这样的判定时,可以代替距离差或与距离差一起使用接收强度、频率调制状态等其它信息。
步骤509的处理可以省略。即,在不进行由物体位置获取部302进行的物体位置BP的获取而进行由物体位置推断部303进行的物体位置BP的推断的情况下,也可以不推断方位θ。
图2所示的功能模块构成是为了便于简要地说明本公开的一个实施方式而示出的一个例子。因此,本公开并不限定于这样的功能模块构成。即,关于功能配置,可以从图2所示的具体的一个例子适当地变更。因此,对于上述的具体例中记载的各处理与功能构成部的对应关系,仅示出一个例子,能够适当地变更。
“获取”能够适当地变更为“计算”等其它表达方式。对于“推断”也相同。各判定处理中的不等号可以带等号,也可以没有等号。即,例如,“阈值以上”可以变更为“超过阈值”。
变形例也不限定于上述的例示。另外,多个变形例可以相互组合。进一步,上述实施方式的全部或者一部分与变形例的全部或者一部分可以相互组合。
上述的各功能构成以及方法可以通过由构成被编程为执行通过计算机程序具体化的一个或多个功能的处理器以及存储器而提供的专用计算机来实现。或者,上述的各功能构成以及方法可以通过由利用一个以上的专用硬件逻辑电路构成处理器而提供的专用计算机来实现。或者,上述的各功能构成以及方法可以通过由被编程为执行一个或者多个功能的处理器以及存储器和由一个以上的硬件逻辑电路构成的处理器的组合构成的一个以上的专用计算机来实现。另外,计算机程序也可以作为由计算机执行的指令存储于计算机可读取的非过渡有形记录介质。
- 运动物体检测装置、运动物体检测方法、运动物体检测程序、运动物体跟踪装置、运动物体跟踪方法以及运动物体跟踪程序
- 物体检测装置、物体检测方法及物体检测装置的设计方法