一种基于导航技术对目标车辆进行路径引导的方法及系统
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及信息技术领域,并且更具体地涉及一种基于导航技术对目标车辆进行路径引导的方法及系统。
背景技术
目前,负责城市安全的管理部门在对嫌疑车辆进行道路引导时,通常是依靠道路视频和警车定位信息,并且凭借现有经验组织引导。然而,随着城市规模不断扩大,路网复杂程度越来越高,传统引导或拦截方式已经难以完成。
为此,如何综合运用导航、定位、地理信息系统(Geographic Information System或Geo-Information system,GIS)技术,并结合安全部门已建设的地理信息资源,有效地对嫌疑车辆进行引导,已成为待解决的问题。
发明内容
为了解决现有技术中的问题,本发明提供一种利用多个终端同步进行导航,引导车辆对特定的路口进行封堵,迫使嫌疑车辆按照规划路线行驶的方法和系统。
根据本发明的一个方面,提供一种基于导航技术对目标车辆进行路径引导的方法,所述方法包括:
确定目标车辆的起始位置,基于所述起始位置确定对目标车辆进行路径引导的目标位置;
获取预先设定的路径引导规则,根据起始位置、目标位置以及路径引导规则确定用于目标车辆的至少一条引导路径并根据所述至少一条引导路径确定引导区域;
获取目标车辆的当前位置,根据所述当前位置和每条引导路径确定多个支路路口,并确定目标车辆通过每个支路路口的概率;
确定所述引导区域内的多个引导车辆中每个引导车辆的位置信息和属性信息,并基于每个引导车辆的位置信息和属性信息将多个引导车辆划分为第一车辆集合和第二车辆集合;以及
利用第一车辆集合中的至少一个引导车辆对目标车辆进行实时定位,利用第二车辆集合中的每辆引导车辆并基于目标车辆通过每个支路路口的概率对目标车辆进行路径引导,以促使目标车辆按照引导路径去往目标位置。
在一个实施例中,在确定目标车辆的起始位置之前还包括:
接收针对目标车辆的路径引导请求,获取所述路径引导请求中的车辆标识信息和请求方身份信息,其中所述车辆标识信息包括:车牌信息和车辆图像信息,所述请求方身份信息包括:请求方标识和请求方认证信息;
在一个实施例中,根据请求方标识在认证信息库中获取与请求方相关联的内部认证信息;
利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证;
当身份认证的结果为认证通过时,根据牌信息和车辆图像信息确定目标车辆的起始位置。
在一个实施例中,根据请求方标识在认证信息库中获取与请求方相关联的内部认证信息;
利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证;
当身份认证的结果为认证不通过时,拒绝所述路径引导请求。
在一个实施例中,所述请求方认证信息包括:文本密码、指纹信息、人脸信息和/或生物信息。
在一个实施例中,利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证包括:
将与请求方相关联的内部认证信息与请求方认证信息进行比对,当比对结果为内容相同时,确定身份认证的结果为认证通过;当比对结果为内容不相同时,确定身份认证的结果为认证不通过。
在一个实施例中,所述基于所述起始位置确定对目标车辆进行路径引导的目标位置包括:
基于所述起始位置确定目标车辆所归属的地理区域;
根据地理区域确定对目标车辆进行路径引导的目标位置。
在一个实施例中,所述预先设定的路径引导规则包括:路径较短、路径较长、规避点优先和途经点优先。
在一个实施例中,根据起始位置、目标位置以及路径引导规则确定用于目标车辆的至少一条引导路径包括:
确定从起始位置到目标位置的多条路径;
根据路径引导规则从多条路径中选择至少一条引导路径。
在一个实施例中,根据所述至少一条引导路径确定引导区域包括:
将包括至少一条引导路径中的每条引导路径的地理区域确定为引导区域。
在一个实施例中,所述获取目标车辆的当前位置包括:通过在目标车辆上安装的磁吸定位终端来获取目标车辆的当前位置。
在一个实施例中,所述获取目标车辆的当前位置包括:通过飞行设备来获取目标车辆的当前位置。
在一个实施例中,所述获取目标车辆的当前位置包括:通过与目标车辆距离最近的引导车辆来获取目标车辆的当前位置。
在一个实施例中,根据所述当前位置和每条引导路径确定多个支路路口包括:
根据所述当前位置确定目标车辆能够去往的每条引导路径,确定目标车辆能够去往的每条引导路径的所有支路中每条支路在离开引导区域边界后的第一个路口,将每条支路在离开引导区域边界后的第一个路口确定为支路路口。
在一个实施例中,所述属性信息包括:车牌信息、最高设计时速、车辆质量信息和车辆体积信息。
在一个实施例中,其中确定目标车辆通过每个支路路口的概率包括:
根据目标车辆的当前位置和移动速度确定通过每个支路路口的概率。
在一个实施例中,基于每个引导车辆的位置信息和属性信息将多个引导车辆划分为第一车辆集合和第二车辆集合包括:
基于目标车辆的当前位置和每个引导车辆的位置信息确定每个引导车辆与目标车辆的最小路径距离;
计算每个引导车辆与目标车辆的最小路径距离的平均值;
根据每个引导车辆的属性信息确定每个引导车辆的属性分数;
将属性分数大于分数阈值并且最小路径距离大于平均值的引导车辆划分到第一车辆集合中,并且未被划分到第一车辆集合中的引导车辆划分到爹让车辆集合中。
在一个实施例中,利用第一车辆集合中的至少一个引导车辆对目标车辆进行实时定位包括:
利用第一车辆集合中与目标车辆的路径距离最短的至少一个引导车辆对目标车辆进行实时定位。
在一个实施例中,利用第二车辆集合中的每辆引导车辆并基于目标车辆通过每个支路路口的概率对目标车辆进行路径引导包括:
基于目标车辆通过每个支路路口的概率的降序顺序对每个支路路口进行排序;
将第二车辆集合中的引导车辆依次分配给经过排序的支路路口。
在一个实施例中,其中,对于多个支路路口中的任意两个支路路口,概率较大的支路路口处引导车辆的数量大于或等于概率较小的支路路口处的引导车辆的数量。
根据本发明的另一方面,提供一种基于导航技术对目标车辆进行路径引导的系统,所述系统包括:
第一确定装置,确定目标车辆的起始位置,基于所述起始位置确定对目标车辆进行路径引导的目标位置;
获取装置,获取预先设定的路径引导规则,根据起始位置、目标位置以及路径引导规则确定用于目标车辆的至少一条引导路径并根据所述至少一条引导路径确定引导区域;
第二确定装置,获取目标车辆的当前位置,根据所述当前位置和每条引导路径确定多个支路路口,并确定目标车辆通过每个支路路口的概率;
划分装置,确定所述引导区域内的多个引导车辆中每个引导车辆的位置信息和属性信息,并基于每个引导车辆的位置信息和属性信息将多个引导车辆划分为第一车辆集合和第二车辆集合;以及
定位装置,利用第一车辆集合中的至少一个引导车辆对目标车辆进行实时定位,利用第二车辆集合中的每辆引导车辆并基于目标车辆通过每个支路路口的概率对目标车辆进行路径引导,以促使目标车辆按照引导路径去往目标位置。
在一个实施例中,还包括接收装置,用于接收针对目标车辆的路径引导请求,获取所述路径引导请求中的车辆标识信息和请求方身份信息,其中所述车辆标识信息包括:车牌信息和车辆图像信息,所述请求方身份信息包括:请求方标识和请求方认证信息;
在一个实施例中,所述获取装置根据请求方标识在认证信息库中获取与请求方相关联的内部认证信息;
利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证;
当身份认证的结果为认证通过时,根据牌信息和车辆图像信息确定目标车辆的起始位置。
在一个实施例中,所述获取装置根据请求方标识在认证信息库中获取与请求方相关联的内部认证信息;
利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证;
当身份认证的结果为认证不通过时,拒绝所述路径引导请求。
在一个实施例中,所述请求方认证信息包括:文本密码、指纹信息、人脸信息和/或生物信息。
在一个实施例中,所述获取装置利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证包括:
所述获取装置将与请求方相关联的内部认证信息与请求方认证信息进行比对,当比对结果为内容相同时,确定身份认证的结果为认证通过;当比对结果为内容不相同时,确定身份认证的结果为认证不通过。
在一个实施例中,所述第一确定装置基于所述起始位置确定对目标车辆进行路径引导的目标位置包括:
第一确定装置基于所述起始位置确定目标车辆所归属的地理区域;
根据地理区域确定对目标车辆进行路径引导的目标位置。
在一个实施例中,所述预先设定的路径引导规则包括:路径较短、路径较长、规避点优先和途经点优先。
在一个实施例中,所述获取装置根据起始位置、目标位置以及路径引导规则确定用于目标车辆的至少一条引导路径包括:
获取装置确定从起始位置到目标位置的多条路径;
获取装置根据路径引导规则从多条路径中选择至少一条引导路径。
在一个实施例中,所述获取装置根据所述至少一条引导路径确定引导区域包括:
所述获取装置将包括至少一条引导路径中的每条引导路径的地理区域确定为引导区域。
在一个实施例中,所述第二确定装置获取目标车辆的当前位置包括:第二确定装置通过在目标车辆上安装的磁吸定位终端来获取目标车辆的当前位置。
在一个实施例中,所述第二确定装置获取目标车辆的当前位置包括:第二确定装置通过飞行设备来获取目标车辆的当前位置。
在一个实施例中,所述第二确定装置获取目标车辆的当前位置包括:第二确定装置通过与目标车辆距离最近的引导车辆来获取目标车辆的当前位置。
在一个实施例中,所述第二确定装置根据所述当前位置和每条引导路径确定多个支路路口包括:
所述第二确定装置根据所述当前位置确定目标车辆能够去往的每条引导路径,确定目标车辆能够去往的每条引导路径的所有支路中每条支路在离开引导区域边界后的第一个路口,将每条支路在离开引导区域边界后的第一个路口确定为支路路口。
在一个实施例中,所述属性信息包括:车牌信息、最高设计时速、车辆质量信息和车辆体积信息。
在一个实施例中,其中第二确定装置确定目标车辆通过每个支路路口的概率包括:
第二确定装置根据目标车辆的当前位置和移动速度确定通过每个支路路口的概率。
在一个实施例中,所述划分装置基于每个引导车辆的位置信息和属性信息将多个引导车辆划分为第一车辆集合和第二车辆集合包括:
划分装置基于目标车辆的当前位置和每个引导车辆的位置信息确定每个引导车辆与目标车辆的最小路径距离;
划分装置计算每个引导车辆与目标车辆的最小路径距离的平均值;
划分装置根据每个引导车辆的属性信息确定每个引导车辆的属性分数;
划分装置将属性分数大于分数阈值并且最小路径距离大于平均值的引导车辆划分到第一车辆集合中,并且未被划分到第一车辆集合中的引导车辆划分到爹让车辆集合中。
在一个实施例中,定位装置利用第一车辆集合中的至少一个引导车辆对目标车辆进行实时定位包括:
定位装置利用第一车辆集合中与目标车辆的路径距离最短的至少一个引导车辆对目标车辆进行实时定位。
在一个实施例中,定位装置利用第二车辆集合中的每辆引导车辆并基于目标车辆通过每个支路路口的概率对目标车辆进行路径引导包括:
定位装置基于目标车辆通过每个支路路口的概率的降序顺序对每个支路路口进行排序;
将第二车辆集合中的引导车辆依次分配给经过排序的支路路口。
在一个实施例中,其中,对于多个支路路口中的任意两个支路路口,概率较大的支路路口处引导车辆的数量大于或等于概率较小的支路路口处的引导车辆的数量。
本发明通过导航、定位、地理信息等技术引导车辆(例如,警车)对特定路口进行封堵,迫使嫌疑车辆按指定路线进行行驶,从而实现嫌疑车辆的定向驱离。本发明能够对多个终端设备(例如,每个引导车辆中具有一个终端设备)同时进行静态、动态的目的地导航,从而可以对嫌疑车辆的路径和目的地进行规划。
本发明涉及导航、定位技术和GIS技术,通过获取嫌疑车辆位置和驱赶目的地,使用优化的算法(例如,A Star算法)对兴趣点进行规避,生成嫌疑车辆行驶路线。本发明可以在统一系统下显示每个引导车辆的定位点,同时根据位置信息为每个引导车辆生成动态导航信息,提供多路动态导航。本发明可以根据需要设置嫌疑车辆的驱赶目的地、驱赶规避兴趣点和驱赶路线,并且对多个引导车辆进行多个静态、动态目的地的综合导航。当嫌疑车辆行驶偏离驱赶路线后,可以自动修正嫌疑车辆驱赶路线和追踪、拦截终点的目的地信息。
附图说明
通过参考下面的附图,可以更为完整地理解本发明的示例性实施方式:
图1为根据本发明实施方式的基于导航技术对目标车辆进行路径引导的方法的流程图;
图2为根据本发明另一实施方式的基于导航技术对目标车辆进行路径引导的方法的流程图;
图3为根据本发明实施方式的基于导航技术对目标车辆进行路径引导的系统的结构示意图;
图4为根据本发明另一实施方式的基于导航技术对目标车辆进行路径引导的系统的结构示意图。
具体实施方式
图1为根据本发明实施方式的基于导航技术对目标车辆进行路径引导的方法100的流程图。方法100从步骤101处开始。
在步骤101,确定目标车辆的起始位置,基于所述起始位置确定对目标车辆进行路径引导的目标位置。
优选地,在确定目标车辆的起始位置之前还包括:接收针对目标车辆的路径引导请求,获取所述路径引导请求中的车辆标识信息和请求方身份信息,其中所述车辆标识信息包括:车牌信息和车辆图像信息,所述请求方身份信息包括:请求方标识和请求方认证信息。
还包括,根据请求方标识在认证信息库中获取与请求方相关联的内部认证信息;利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证;当身份认证的结果为认证通过时,根据牌信息和车辆图像信息确定目标车辆的起始位置。
还包括,根据请求方标识在认证信息库中获取与请求方相关联的内部认证信息;利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证;当身份认证的结果为认证不通过时,拒绝所述路径引导请求。
其中请求方认证信息包括:文本密码、指纹信息、人脸信息和/或生物信息。利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证包括:将与请求方相关联的内部认证信息与请求方认证信息进行比对,当比对结果为内容相同时,确定身份认证的结果为认证通过;当比对结果为内容不相同时,确定身份认证的结果为认证不通过。
优选地,基于所述起始位置确定对目标车辆进行路径引导的目标位置包括:基于所述起始位置确定目标车辆所归属的地理区域;根据地理区域确定对目标车辆进行路径引导的目标位置。
在步骤102,获取预先设定的路径引导规则,根据起始位置、目标位置以及路径引导规则确定用于目标车辆的至少一条引导路径并根据所述至少一条引导路径确定引导区域。
优选地,预先设定的路径引导规则包括:路径较短、路径较长、规避点优先和途经点优先。其中根据起始位置、目标位置以及路径引导规则确定用于目标车辆的至少一条引导路径包括:确定从起始位置到目标位置的多条路径;根据路径引导规则从多条路径中选择至少一条引导路径。其中根据所述至少一条引导路径确定引导区域包括:将包括至少一条引导路径中的每条引导路径的地理区域确定为引导区域。
在步骤103,获取目标车辆的当前位置,根据所述当前位置和每条引导路径确定多个支路路口,并确定目标车辆通过每个支路路口的概率。优选地,获取目标车辆的当前位置包括:通过在目标车辆上安装的磁吸定位终端来获取目标车辆的当前位置。其中获取目标车辆的当前位置包括:通过飞行设备来获取目标车辆的当前位置。获取目标车辆的当前位置包括:通过与目标车辆距离最近的引导车辆来获取目标车辆的当前位置。
根据所述当前位置和每条引导路径确定多个支路路口包括:根据所述当前位置确定目标车辆能够去往的每条引导路径,确定目标车辆能够去往的每条引导路径的所有支路中每条支路在离开引导区域边界后的第一个路口,将每条支路在离开引导区域边界后的第一个路口确定为支路路口。
其中属性信息包括:车牌信息、最高设计时速、车辆质量信息和车辆体积信息。其中确定目标车辆通过每个支路路口的概率包括:根据目标车辆的当前位置和移动速度确定通过每个支路路口的概率。
在步骤104,确定所述引导区域内的多个引导车辆中每个引导车辆的位置信息和属性信息,并基于每个引导车辆的位置信息和属性信息将多个引导车辆划分为第一车辆集合和第二车辆集合。
优选地,基于每个引导车辆的位置信息和属性信息将多个引导车辆划分为第一车辆集合和第二车辆集合包括:基于目标车辆的当前位置和每个引导车辆的位置信息确定每个引导车辆与目标车辆的最小路径距离;计算每个引导车辆与目标车辆的最小路径距离的平均值;根据每个引导车辆的属性信息确定每个引导车辆的属性分数;将属性分数大于分数阈值并且最小路径距离大于平均值的引导车辆划分到第一车辆集合中,并且未被划分到第一车辆集合中的引导车辆划分到爹让车辆集合中。
在步骤105,利用第一车辆集合中的至少一个引导车辆对目标车辆进行实时定位,利用第二车辆集合中的每辆引导车辆并基于目标车辆通过每个支路路口的概率对目标车辆进行路径引导,以促使目标车辆按照引导路径去往目标位置。
优选地,利用第一车辆集合中的至少一个引导车辆对目标车辆进行实时定位包括:利用第一车辆集合中与目标车辆的路径距离最短的至少一个引导车辆对目标车辆进行实时定位。利用第二车辆集合中的每辆引导车辆并基于目标车辆通过每个支路路口的概率对目标车辆进行路径引导包括:基于目标车辆通过每个支路路口的概率的降序顺序对每个支路路口进行排序;将第二车辆集合中的引导车辆依次分配给经过排序的支路路口。其中,对于多个支路路口中的任意两个支路路口,概率较大的支路路口处引导车辆的数量大于或等于概率较小的支路路口处的引导车辆的数量。
图1为根据本发明实施方式的基于导航技术对目标车辆进行路径引导的方法200的流程图。方法200从步骤201处开始。
步骤201,设置目标车辆或嫌疑车辆的驱赶目的地。在步骤201之前还可以包括,在目标车辆或嫌疑车辆上临时放置磁吸定位终端,磁吸定位终端每隔预定时间(例如,T秒种,T为自然数)发送一次嫌疑车辆的位置和速度信息。
步骤202,选择驱赶规则Q,例如驱赶时需要规避的兴趣点,并对驱赶路线进行规划。
步骤203,接收嫌疑车辆的位置信息。
在步骤205,确定是否存在与嫌疑车辆的位置信息相关的信号,如果没有信号,则在步骤204继续检测,即继续对接收的嫌疑车辆的位置信息进行判断。如果具有信号,则进行步骤206。
步骤206,获取并记录嫌疑车辆的位置信息W
步骤207,分别计算驱赶路线各支路口,嫌疑车辆冲闯通过的概率Q。当具有N(N为自然数)个支路口时,嫌疑车辆冲闯通过的概率Q
步骤208,通过警车内安装的追踪、拦截终端,依次读取驱赶路线周围预定距离内H辆(其中H为自然数)的警车位置W
步骤209,分配距离嫌疑车辆W
步骤210,通过GIS对道路进行搜索,以时间为最高优先级,结合警车位置W
步骤211,向各个进行拦截的警车的终端下发以警车位置为起始地,以拦截路口为终点的导航信息和行驶过程中周边警车的定位信息和嫌疑车辆的定位信息,向各追踪警车的终端下发以警车位置为起始地,以嫌疑车辆为终点的导航信息和行驶过程中周边警车定位信息;
步骤212,向参加驱逐任务的警车下发嫌疑车辆和参加任务警车的位置更新数据。
步骤213,确定嫌疑车辆是否按驱赶路线行驶,如果嫌疑车辆按驱赶路线行驶执行步骤212,如果嫌疑车辆未按驱赶路线行驶执行步骤203。
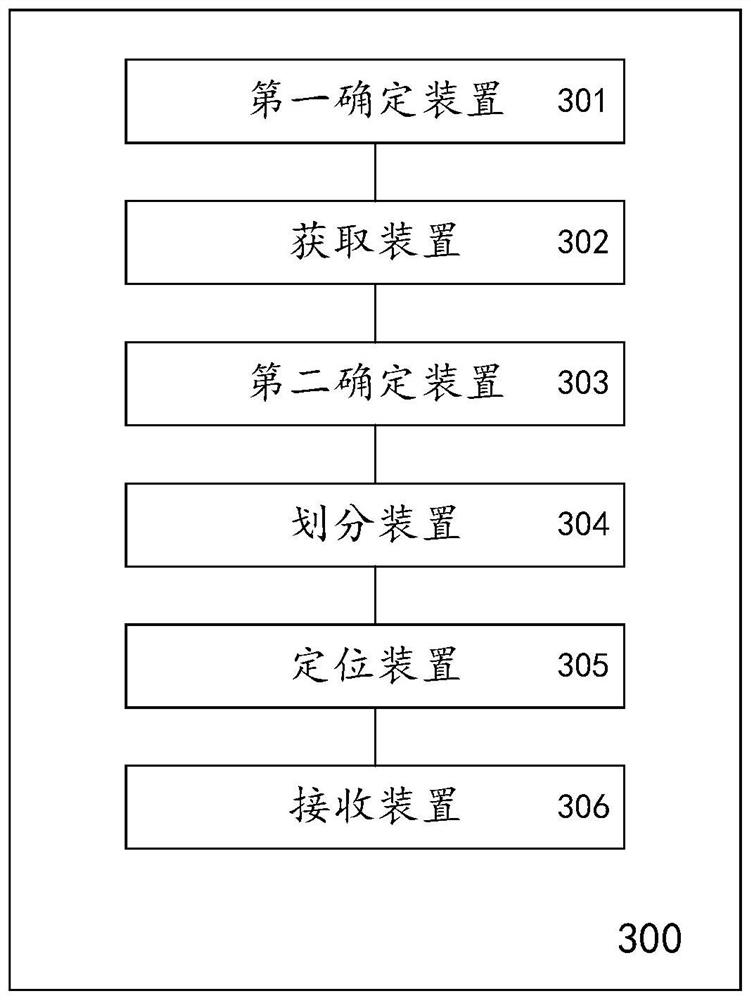
图3为根据本发明实施方式的基于导航技术对目标车辆进行路径引导的系统300的结构示意图。系统300包括:
第一确定装置301,确定目标车辆的起始位置,基于所述起始位置确定对目标车辆进行路径引导的目标位置。第一确定装置基301于所述起始位置确定对目标车辆进行路径引导的目标位置包括:第一确定装置基于所述起始位置确定目标车辆所归属的地理区域;根据地理区域确定对目标车辆进行路径引导的目标位置。
获取装置302,获取预先设定的路径引导规则,根据起始位置、目标位置以及路径引导规则确定用于目标车辆的至少一条引导路径并根据所述至少一条引导路径确定引导区域。预先设定的路径引导规则包括:路径较短、路径较长、规避点优先和途经点优先。
获取装置302根据请求方标识在认证信息库中获取与请求方相关联的内部认证信息;利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证;当身份认证的结果为认证通过时,根据牌信息和车辆图像信息确定目标车辆的起始位置。
获取装置302根据请求方标识在认证信息库中获取与请求方相关联的内部认证信息;利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证;当身份认证的结果为认证不通过时,拒绝所述路径引导请求。
请求方认证信息包括:文本密码、指纹信息、人脸信息和/或生物信息。
获取装置302利用与请求方相关联的内部认证信息对请求方认证信息进行身份认证包括:获取装置302将与请求方相关联的内部认证信息与请求方认证信息进行比对,当比对结果为内容相同时,确定身份认证的结果为认证通过;当比对结果为内容不相同时,确定身份认证的结果为认证不通过。
获取装置302根据起始位置、目标位置以及路径引导规则确定用于目标车辆的至少一条引导路径包括:获取装置302确定从起始位置到目标位置的多条路径;获取装置302根据路径引导规则从多条路径中选择至少一条引导路径。
获取装置302根据所述至少一条引导路径确定引导区域包括:获取装置302将包括至少一条引导路径中的每条引导路径的地理区域确定为引导区域。
第二确定装置303,获取目标车辆的当前位置,根据所述当前位置和每条引导路径确定多个支路路口,并确定目标车辆通过每个支路路口的概率。第二确定装置303获取目标车辆的当前位置包括:第二确定装置303通过在目标车辆上安装的磁吸定位终端来获取目标车辆的当前位置。第二确定装置303获取目标车辆的当前位置包括:第二确定装置303通过飞行设备来获取目标车辆的当前位置。第二确定装置303获取目标车辆的当前位置包括:第二确定装置303通过与目标车辆距离最近的引导车辆来获取目标车辆的当前位置。
第二确定装置303根据所述当前位置和每条引导路径确定多个支路路口包括:第二确定装置303根据所述当前位置确定目标车辆能够去往的每条引导路径,确定目标车辆能够去往的每条引导路径的所有支路中每条支路在离开引导区域边界后的第一个路口,将每条支路在离开引导区域边界后的第一个路口确定为支路路口。
属性信息包括:车牌信息、最高设计时速、车辆质量信息和车辆体积信息。第二确定装置303确定目标车辆通过每个支路路口的概率包括:第二确定装置303根据目标车辆的当前位置和移动速度确定通过每个支路路口的概率。
划分装置304,确定所述引导区域内的多个引导车辆中每个引导车辆的位置信息和属性信息,并基于每个引导车辆的位置信息和属性信息将多个引导车辆划分为第一车辆集合和第二车辆集合。
划分装置304基于每个引导车辆的位置信息和属性信息将多个引导车辆划分为第一车辆集合和第二车辆集合包括:划分装置304基于目标车辆的当前位置和每个引导车辆的位置信息确定每个引导车辆与目标车辆的最小路径距离;划分装置304计算每个引导车辆与目标车辆的最小路径距离的平均值;划分装置304根据每个引导车辆的属性信息确定每个引导车辆的属性分数;划分装置304将属性分数大于分数阈值并且最小路径距离大于平均值的引导车辆划分到第一车辆集合中,并且未被划分到第一车辆集合中的引导车辆划分到爹让车辆集合中。
定位装置305,利用第一车辆集合中的至少一个引导车辆对目标车辆进行实时定位,利用第二车辆集合中的每辆引导车辆并基于目标车辆通过每个支路路口的概率对目标车辆进行路径引导,以促使目标车辆按照引导路径去往目标位置。
定位装置305利用第一车辆集合中的至少一个引导车辆对目标车辆进行实时定位包括:定位装置305利用第一车辆集合中与目标车辆的路径距离最短的至少一个引导车辆对目标车辆进行实时定位。定位装置305利用第二车辆集合中的每辆引导车辆并基于目标车辆通过每个支路路口的概率对目标车辆进行路径引导包括:定位装置305基于目标车辆通过每个支路路口的概率的降序顺序对每个支路路口进行排序;将第二车辆集合中的引导车辆依次分配给经过排序的支路路口。其中,对于多个支路路口中的任意两个支路路口,概率较大的支路路口处引导车辆的数量大于或等于概率较小的支路路口处的引导车辆的数量。
接收装置306,用于接收针对目标车辆的路径引导请求,获取所述路径引导请求中的车辆标识信息和请求方身份信息,其中所述车辆标识信息包括:车牌信息和车辆图像信息,所述请求方身份信息包括:请求方标识和请求方认证信息。
图4为根据本发明另一实施方式的基于导航技术对目标车辆进行路径引导的系统400的结构示意图。系统400由追踪、拦截导航终端、磁吸定位终端以及服务器端三部分组成。
追踪、拦截导航终端是安装在警车内部的一种终端主要提供向服务器端传输警车属性、位置、速度信息和接受服务器端下发的导航和周边终端定位信息,401警力属性提取模块主要提供警车车牌号、最高设计时速和车辆体积属性信息;402定位采集模块主要提供车辆位置和速度信息;403通信模块主要提供数据信息传输;404显示模块主要提供地图、车辆导航、车辆状态信息、周边终端位置信息的显示;405地图存储模块主要提供地图存储数据。
磁吸定位终端是一种临时固定在嫌疑车辆的一种终端,主要提供向服务器端提供嫌疑车辆的位置和速度信息。定位采集模块411用于获取定位信息。通信模块412用于将定位采集模块411所获取的定位信息发送给服务器的通信模块428。
可替换地,不采用磁吸定位终端确定嫌疑车辆位置信息,而是采用距离嫌疑车辆最近的警车为嫌疑车辆的相对位置信息。原方案缺点是磁吸定位终端采用抛投方式临时固定在嫌疑车辆上,对抛投者技术要求较高,同时在具体使用时位置信号融合受磁铁干扰。原方案优点是始终可以对嫌疑车辆进行定位,在嫌疑车辆脱离追赶警车后依然可以进行路口拦截。
服务器端是一种安装在数据中心的一种终端,主要提供终端数据采集、追踪驱赶方案制定和数据下发。地图存储模块421用于存储地图数据。422位置接收模块主要接收嫌疑车辆和目标车辆的位置。速度信息;423警力读取模块主要接收警车属性信息;424驱离路线生成模块,以嫌疑车辆位置为开始点,以驱离目标地点为终点,同时对学校、医院、加油站等进行规避生成驱赶路线;425路口拦截评估模块,主要提供驱赶路线上的支路口,嫌疑车辆冲闯通过的概率;426拦截位置匹配模块,主要根据425路口拦截评估模块提供的概率顺序信息,结合422位置接收模块和423警力读取模块信息,对概率由高到低的路口进行警车匹配;427导航信息下发模块,主要根据426拦截位置导航模块匹配结果信息,向各拦截警车终端下发以警车位置为起始地,以拦截路口为终点的导航信息和行驶过程中周边警车定位信息和嫌疑车辆的定位信息,向各追踪警车终端下发以警车位置为起始地,以嫌疑车辆为终点的导航信息和行驶过程中周边警车定位信息。通信模块428用于从磁吸定位终端的通信模块412获取定位信息。以及,通信模块428用于与通信模块403进行交互通信。
- 一种基于导航技术对目标车辆进行路径引导的方法及系统
- 一种基于膜系统的多目标车辆路径优化方法及装置