具有传感器采样特征的药物递送组件
文献发布时间:2023-06-19 12:16:29
本发明一般涉及与数据的生成、收集和存储相关的医疗装置。在具体实施例中,本发明涉及用于以可靠高效方式捕获药物递送剂量数据的装置、系统和方法。
背景技术
在本发明的公开内容中,主要参考药物递送装置,所述药物递送装置包括由旋转驱动构件驱动的螺纹活塞杆,这样的装置例如在通过递送胰岛素治疗糖尿病中使用,然而,这仅是本发明的示例性用途。
药物注入装置极大地改善了必须自我施予药物和生物制剂的患者的生活。药物注入装置可以采用多种形式,包括简单的一次性装置,其仅仅是具有注入装置的安瓿,或者它们可以是适于与预装筒一起使用的耐用装置。无论其形式和类型如何,它们已被证明是帮助患者自我施予可注入药物和生物制剂的重要辅助手段。它们还极大地帮助护理人员向无法进行自我注入的人施予可注入药物。
在合适的时间和以正确的大小进行必要的胰岛素注入对于控制糖尿病是重要的,即遵守指定的胰岛素治疗方案是重要的。为了使医务人员能够确定规定剂量模式的有效性,鼓励糖尿病患者记录每次注入的大小和时间。然而,这样的记录通常保存在手写笔记本中,并且记录的信息可能不容易上载到计算机以进行数据处理。此外,由于仅记录患者记录的事件,因此如果记录的信息在患者疾病的治疗中具有任何价值,笔记本系统要求患者记住记录每次注入。记录中缺失或错误的记录会导致注入历史的误导性情况,并且因此导致医务人员对未来药物治疗进行决策的误导性基础。因此,可能期望自动记录来自药物递送系统的注入信息。
尽管一些注射装置将该监测/采集机构集成到装置本身中,例如,如在US2009/0318865和WO2010/052275中所公开的,但是今天的大多数装置没有它。最广泛使用的装置是纯机械装置,其是耐用的或预装的。后一种装置在排空后将被丢弃,并且因此非常便宜,以至于在装置本身中并入电子数据采集功能并不是成本合算的。为了解决该问题已提出许多解决方案,其将帮助使用者生成、收集和分发指示给定医疗装置的使用的数据。
例如,WO2014/037331在第一实施例中描述了一种电子辅助装置(也称为“附加模块”或“附加装置”),其适于可释放地附接到笔型药物递送装置。该装置包括相机并且配置成对从通过药物递送装置上的剂量窗口可见的旋转刻度鼓捕获的图像执行光学字符识别(OCR),由此确定已拨入药物递送装置中的药剂的剂量。WO 2014/037331还描述了电子辅助装置的第二实施例,其适于可释放地附接到笔型的药物递送装置,所述药物递送装置包括与设定剂量对应地从装置向近侧延伸的驱动螺杆。辅助装置包括用于确定驱动螺杆的轴向延伸的传感器装置以及用于检测近侧递送按钮的操作的传感器装置。WO2014/020008公开了一种电子辅助装置,其适于可释放地附接到笔型的药物递送装置。该装置包括相机并配置成基于OCR确定刻度鼓值。为了适当地确定排出剂量的大小,辅助装置还包括附加的机电传感器装置以确定是否设定、校正或递送剂量大小。在WO 2014/161952和EP 3103492中示出了用于笔装置的另外的外部装置。
考虑到以上所述,本发明的目的是提供允许药物递送组件安全、容易且高效地捕获数据的装置和方法,所述药物递送组件包括用于确定排出的药物量的大小的传感器装置。传感器装置可以并入药物递送装置中或设置为用户可安装的附加装置。
发明内容
在本发明的公开内容中,将描述多个实施例和方面,它们将解决上述目标中的一个或多个,或者将解决从下面的公开内容以及从示例性实施例的描述将显而易见的目标。
考虑传统的基于活塞的药物递送装置(由弹簧驱动或由用户手动驱动)的给药,显然药物以稳态排出,指示基于旋转运动输入(即驱动器部件的旋转移动转换成活塞杆的轴向移动,将筒活塞向远侧移动以排出设定剂量)的排出机构将同样以相应的稳态旋转。对于设计成确定给定指示器构件的旋转量的给定传感器系统(即,对应于排出剂量的大小旋转的排出机构的部件),这将允许指定必要的采样频率。为了实现尽可能低的功耗,将指定尽可能低但仍然足够的采样率。
本发明基于以下认识:尽管药物递送装置的给药似乎以稳定线性状态发生,但活塞驱动器(即,通常活塞杆)的对应轴向移动并且因此排出机构中的给定部件的旋转移动不是线性的。
由于基本上药物递送系统的所有商业已知的药物筒都配备有由例如橡胶等弹性体材料制造的活塞,所以引入弹性部件,已发现弹性部件影响给药。更具体地,已发现在给药事件期间一开始发生橡胶活塞的轴向压缩,并且这种初始压缩以比随后通过中空皮下针排出药物更高的轴向速度发生。相应地,为了使传感器系统能够可靠地检测给定指示器部件也在给药事件的初始阶段期间的旋转运动量,将需要更高的采样率。
在解决了这一问题之后,还解决了另一个相关问题。在活塞驱动器,即实际上在活塞上施加轴向驱动力的元件,通常是活塞杆,可以一开始且出于若干原因定位在距活塞近侧表面的距离处,由此建立对应于活塞的弹性压缩的所称的气隙同样将导致药物排出机构中的部件的初始快速轴向和旋转移动。
要解决此问题,本发明在第一方面提供了一种药物递送组件,其包括壳体、药物储存器或用于接收药物储存器的装置、药物排出装置和传感器系统。所述药物排出装置包括:剂量设定装置,所述剂量设定装置允许使用者设定待排出的药物剂量;释放装置,所述释放装置可致动以允许所述药物排出装置排出设定剂量;以及适于在药物剂量排出期间相对于所述壳体旋转的指示器,旋转量指示排出剂量的大小。所述传感器系统包括:传感器组件,所述传感器组件适于测量指示所述指示器的旋转位置和/或旋转移动的指示器的特性,所述传感器组件包括适于以第一采样频率操作的至少一个传感器元件以及适于以第二较低采样频率操作的至少一个传感器元件;以及处理器,所述处理器配置成基于来自所述至少一个传感器元件的测量值来确定:(i)所述指示器的旋转位置和/或旋转移动量,以及(ii)所述指示器的转速。所述传感器系统可在非操作状态与操作状态之间致动。当所述传感器系统被致动时:以所述第一采样频率操作至少一个传感器元件,以及当检测到转速降低时:以所述第二采样频率操作至少一个传感器元件。
通过这种布置,解决了与来自药物递送装置的流体药物的初始给药有关的特殊情况,以及对于可靠和节能的剂量大小确定的一般需要。
根据检测到药物递送装置已离开初始压缩/气隙阶段并且进入较慢的主要给药状态而以不同采样频率操作传感器的构思可以多种方式实现。例如,具有低功耗的专用传感器元件可以一开始以高采样率操作,而具有高功耗的传感器元件可以随后以较低采样率操作。这样,最初使用的传感器应该能够正确地确定指示器元件的旋转位置。替代性地,适合高采样率和低采样率两者的传感器元件可以像使用多个不同传感器元件实施混合设置一样使用。
相应地,在示例性实施例中,所述传感器组件包括适于以非恒定采样频率操作的至少一个传感器元件。当所述传感器系统被致动时:以所述第一采样频率操作适于以非恒定采样频率操作的至少一个传感器元件,以及当检测到转速降低时:对于适于以非恒定采样频率操作并且一开始以所述第一采样频率操作的所述至少一个传感器元件,所述采样频率降低到所述第二采样频率。或者以较短的措辞描述:同一传感器元件以两个不同的采样频率操作。
可以根据所述转速的一个或多个预定义阈值控制至少一个传感器元件的采样频率。
所述传感器组件可包括多个传感器元件,对于每次采样,以第一采样频率操作第一数量的传感器,并且当已经检测到转速降低时,在每次采样时以较低采样频率操作第二较高数量的传感器。
在特定实施例中,所述指示器包括磁性部件;并且至少一个传感器元件为适于测量磁场的一个或多个分量的磁体传感器,其中,根据检测到转速降低,至少一个磁体传感器可以非恒定采样频率操作。替代地,光学传感器可以例如与位于指示器上的视觉标记组合使用。
术语“传感器元件”可以指示单一传感器部件,例如,光传感器,但它也可以指示传感器部件的功能部分。例如,“指南针类型”的磁传感器适于在三个方向上测量磁场值,其中对于给定方向,对应的传感器结构通常可以独立地操作,并且因此表示单独的传感器元件。
在具体实施例中,上述药物递送组件可包括大体圆柱形的药物储存器,所述药物储存器具有由弹性体材料形成的轴向可移动活塞,该活塞被加载到筒保持器中或者设置为一次性预装装置的一部分。
在本发明的特定方面,提供了如上所述的药物递送组件,其包括药物递送装置和适于可释放地安装在所述药物递送装置上的附加装置。所述药物递送装置包括壳体,药物储存器或用于接收药物储存器的装置,以及药物排出装置,而所述附加装置包括传感器系统。
在示例性实施例中,所述药物排出装置包括:可旋转剂量设定构件,所述可旋转剂量设定构件允许使用者设定待排出的药物剂量;在近侧位置和远侧位置之间可致动的释放构件,所述近侧位置允许设定剂量,所述远侧位置允许所述药物排出装置排出设定剂量,以及驱动弹簧,所述驱动弹簧布置成在剂量设定期间应变并且由所述释放构件释放,以由此驱动从所述药物储存器排出一定量的药物。所述附加装置还包括:附加壳体,所述附加壳体适于可释放地附接到药物递送装置壳体;附加剂量设定构件,所述附加剂量设定构件适于直接或间接接合所述剂量设定构件;以及相对于所述附加剂量设定构件在以下之间轴向可移动的可致动附加释放构件,(i)近侧剂量设定位置,在所述近侧剂量设定位置,所述附加剂量设定构件在所述附加装置安装在所述药物递送装置上时能够被操作以旋转所述剂量设定构件以设定剂量,以及(ii)远侧剂量排出位置,在所述远侧剂量排出位置,所述释放构件在所述附加装置安装在所述药物递送装置上时移动到其远侧位置以释放设定剂量。
在另一方面,提供了一种适于可释放地安装在药物递送装置上的附加药物递送组件。所述药物递送装置包括壳体、药物储存器或用于接收药物储存器的装置、药物排出装置,所述药物排出装置包括:剂量设定装置,所述剂量设定装置允许使用者设定待排出的药物剂量;释放装置,所述释放装置可致动以允许所述药物排出装置排出设定剂量;以及适于在药物剂量排出期间相对于所述壳体旋转的指示器,旋转量指示排出剂量的大小。所述附加装置包括:附加壳体,所述附加壳体适于可释放地附接到药物递送装置壳体;传感器组件,所述传感器组件适于在所述附加装置安装在所述药物递送装置上时测量指示所述指示器的旋转位置和/或旋转移动的指示器的特性,所述传感器组件包括适于以第一采样频率操作的至少一个传感器元件以及适于以第二较低采样频率操作的至少一个传感器元件;以及处理器,所述处理器配置成基于来自所述至少一个传感器元件的测量值来确定:(i)所述指示器的旋转位置和/或旋转移动量,以及(ii)所述指示器的转速。所述传感器系统可在非操作状态与操作状态之间致动。当传感器系统被致动时,以所述第一采样频率操作至少一个传感器元件,以及当检测到转速降低时:以所述第二较低采样频率操作至少一个传感器元件。
至少一个传感器元件可以一开始以所述第一采样频率操作,并且随后在检测到转速降低时以所述第二较低采样频率操作。
在示例性实施例中,所述指示器包含磁性部件,并且所述至少一个传感器元件呈磁体传感器的形式,所述磁体传感器适于测量由所述指示器磁性部件产生的磁场的一个或多个分量。
可以根据所述转速的一个或多个预定义阈值控制至少一个传感器元件的采样频率。
传感器组件可包括多个传感器元件,由此对于每次采样,以第一采样频率操作第一数量的传感器,并且当检测到转速降低时,在每次采样时以较低采样频率操作第二较高数量的传感器(例如,相同传感器和/或附加传感器)。
在本发明的又一方面,提供一种用于从药物递送组件捕获剂量相关数据的药物递送组件。所述方法包括以下步骤:(i)提供药物递送组件,所述药物递送组件包括:壳体、药物储存器或用于接收药物储存器的装置、药物排出装置和传感器系统。所述药物排出装置包括:剂量设定装置,所述剂量设定装置允许使用者设定待排出的药物剂量;释放装置,所述释放装置可致动以允许所述药物排出装置排出设定剂量;以及适于在药物剂量排出期间相对于所述壳体旋转的指示器,旋转量指示排出剂量的大小。所述传感器系统包括:传感器组件,所述传感器组件适于测量指示所述指示器的旋转位置和/或旋转移动的指示器的特性,所述传感器组件包括适于以第一采样频率操作的至少一个传感器元件以及适于以第二较低采样频率操作的至少一个传感器元件;以及处理器,所述处理器配置成基于来自所述至少一个传感器元件的测量值来确定:(i)所述指示器的旋转位置和/或旋转移动量,以及(ii)所述指示器的转速。所述方法包括以下步骤:(ii)将所述传感器系统从非操作状态致动到操作状态,(iii)以所述第一采样频率操作至少一个传感器元件,(iv)检测所述指示器的转速,以及(v)当检测到转速降低时,以所述第二较低采样频率操作至少一个传感器元件。
所提供的药物递送组件以及操作传感器元件的模式可以如上文所述在对应的药物递送组件的公开内容中进行修改。
在本发明的更一般方面,提供一种适于与指示器组合使用的通用传感器系统,所述指示器布置成相对于参考部件并且对应于参考轴线旋转。所述传感器系统包括传感器组件,所述传感器组件适于测量指示所述指示器的旋转位置和/或旋转移动的指示器的特性,所述传感器组件包括适于以非恒定采样频率操作的至少一个传感器元件。所述传感器系统还包括处理器,所述处理器配置成基于来自所述至少一个传感器元件的测量值来确定所述指示器的旋转位置和/或旋转移动量,以及所述指示器的转速。在此类系统中,处理器配置成响应于所确定的转速而动态地控制采样频率。
通过这种布置,可以实现指示器的旋转移动和位置的可靠和节能确定。
所述传感器系统可在非操作状态与操作状态之间致动,其中所述传感器系统在被致动时以初始采样频率操作,其中当检测到转速降低时,所述采样频率降低。可以根据转速的一个或多个预定义阈值控制采样频率。替代地或另外,对于预定转速范围,采样频率可以随着转速连续地变化。
在示例性实施例中,所述指示器包括磁性部件,所述至少一个传感器元件是适于测量磁场的一个或多个分量的磁体传感器。
在特定实施例中,提供了一种药物递送系统,其包括药物递送装置和适于可释放地安装在所述药物递送装置上的附加装置。所述药物递送装置包括:壳体,所述壳体形成参考部件;药物储存器或用于接收药物储存器的装置;药物排出装置,所述药物排出装置包括允许使用者设定待排出的药物剂量的可旋转剂量设定构件;可在近侧位置与远侧位置之间致动的释放构件,所述近侧位置允许设定剂量,所述远侧位置允许所述药物排出装置排出设定剂量;驱动弹簧,所述驱动弹簧布置成在剂量设定期间应变并且由所述释放构件释放以由此驱动从所述药物储存器排出一定量的药物;以及上述的指示器。所述指示器适于在剂量设定和/或排出期间移动,移动量指示设定和/或排出剂量的大小。附加装置包括如上所述的传感器系统,其中,所确定的指示器的旋转位置和/或旋转移动量对应于设定和/或排出剂量。
在另一特定实施例中,提供一种药物递送装置,其包括如上所述的传感器系统。所述药物递送装置还包括:壳体,所述壳体形成参考部件;药物储存器或用于接收药物储存器的装置;药物排出装置,所述药物排出装置包括允许使用者设定待排出的药物剂量的可旋转剂量设定构件;可在近侧位置与远侧位置之间致动的释放构件,所述近侧位置允许设定剂量,所述远侧位置允许所述药物排出装置排出设定剂量;驱动弹簧,所述驱动弹簧布置成在剂量设定期间应变并且由所述释放构件释放以由此驱动从所述药物储存器排出一定量的药物;以及指示器。所述指示器适于在剂量设定和/或排出期间移动,移动量指示所述设定和/或排出剂量的大小,其中所确定的所述指示器元件的旋转位置和/或旋转移动量对应于设定和/或排出剂量。
当在上文中使用术语“构件”时,该术语还涵盖包括多个部件的组件。
如本文所用,术语“胰岛素”表示包括能够以受控方式通过递送装置(如套管或空心针头)的任何含药可流动药物,例如液体、溶液、凝胶或细悬浮液,并且其具有血糖控制作用,例如人胰岛素及其类似物以及非胰岛素,如GLP-1及其类似物。在示例性实施例的描述中,将参考胰岛素的使用,然而,所述模块也可以用于产生其它类型药物(例如,生长激素)的记录。
附图说明
在下文中,将参考附图描述本发明的实施例,其中
图1A示出了笔装置,
图1B示出了图1A的笔装置,其中笔帽被移除,
图2在分解图中示出了图1A的笔装置的部件,
图3A和3B在截面图中示出了两种状态下的排出机构,
图4A和4B示出了附加装置和药物递送装置的示意图,
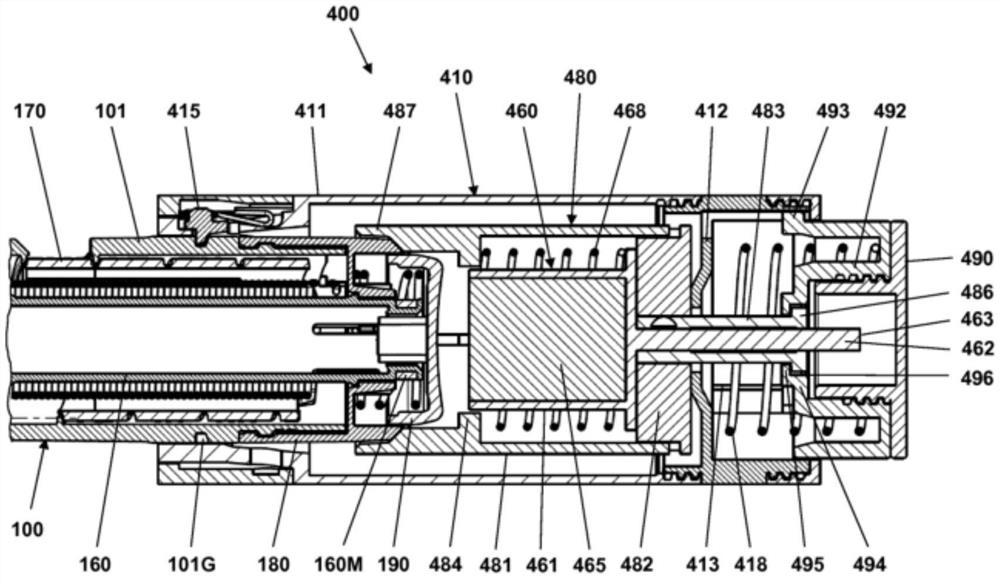
图5在横截面图中示出了安装在药物递送装置的壳体上的附加装置,
图6示出了与药物递送装置组合的附加装置的第二实施例,
图7A和7B示出了图6的附加装置的横截面图,
图7C详细示出了结合在图7A的附加装置中的电子传感器电路,
图8A-8D在截面图中并在不同的操作状态下示出了包括安装在药物递送装置上的图6的附加装置的组件,
图9在分解图中示出了附加装置的第三实施例的部件,
图10A和10B在不同状态下示出了安装在笔装置上的图9的附加装置的部件,
图11A和11B示出了图10A和10B中所示的装置的横截面图,
图12A和12B在部分剖视图中示出了处于组装状态的第三实施例,
图13A-13F在横截面图中示出了处于一系列操作状态的第三实施例,
图14示出了在环形示踪元件中等距布置的单独的偶极磁体,
图15A示出了组合布置在单独的磁体之间的由可磁化材料制造的示踪部件,
图15B示出了布置在多极电磁场中的由可磁化材料制造的示踪部件,
图16示出了包括相对于示踪部件布置的磁力计的传感器系统的不同实施例,
图17A示出了与第一传感器设置组合的偶极示踪磁体的角测量,
图17B示出了与第二传感器设置组合的四极示踪磁体的角测量,
图18示出了在磁体的一个完整旋转中来自四极磁体的信号,
图19示出了来自图18的信号的频率分量的图,
图20示出了四极磁体和7个磁力计的组件,
图21示出了安装在药物递送装置上的附加装置的另一实施例,
图22示出了安装在药物递送装置上的附加装置的又一实施例,
图23A和图23B示出了静态采样策略的第一实例和第二实例,以及
图24示出了动态采样策略的实例。
在附图中,类似的结构主要由类似的附图标记标识。
具体实施方式
当使用诸如“上”和“下”,“右”和“左”,“水平”和“竖直”的以下术语或类似的相对表达时,这些仅涉及附图,而不一定指实际的使用情况。所示附图是示意性表示,由于该原因,不同结构的构造及其相对尺寸仅用于说明目的。当术语构件或元件用于给定部件时,它通常指示在所述实施例中部件是单一部件,然而,相同构件或元件可以替代地包括多个子部件,就像所述部件中的两个或更多个可以作为单一部件被提供,例如作为单个注塑件被制造。术语“组件”并不意味着所述部件必须能够被组装以在给定组装过程期间提供单一或功能组件,而仅用于将组合在一起的部件描述为在功能上更紧密相关。
在转向本发明本身的实施例之前,将描述预装药物递送的示例,这样的装置为本发明的示例性实施例提供基础。尽管图1-3中所示的笔形药物递送装置100可以代表“通用”药物递送装置,但实际示出的装置是由丹麦
笔装置100包括帽部分107和主要部分,所述主要部分具有带壳体101的近侧主体或驱动组件部分,药物排出机构布置或集成在所述壳体中,以及远侧筒保持器部分,具有远侧针头可穿透隔膜的药物填充透明筒113布置在所述远侧筒保持器部分中并通过附接到近侧部分的不可移除的筒保持器保持就位,筒保持器具有允许检查筒的一部分的开口以及允许针头组件可释放地安装的远侧联接装置115。筒设置有由排出机构的活塞杆形成部分驱动的活塞,并且可以例如包含胰岛素、GLP-1或生长激素制剂。具有多个轴向定向的凹槽182的最近侧可旋转剂量设定构件180用于手动设定显示窗口102中显示的药物的所需剂量,并且然后当致动按钮190时可以将其排出。从以下描述将显而易见,所示轴向定向的凹槽182可以称为“驱动凹槽”。剂量设定构件180具有大体圆柱形外表面181(即,剂量设定构件可略微呈锥形),其在所示的实施例中通过包括多个轴向定向的细凹槽来纹理化以改善剂量设定期间的手指夹持。该窗口是壳体中的开口的形式,所述开口由倒角边缘部分109和剂量指针109P围绕,该窗口允许观察螺旋可旋转指示器构件170(刻度鼓)的一部分。取决于药物递送装置中实施的排出机构的类型,排出机构可以包括如所示实施例中的弹簧,所述弹簧在剂量设定期间应变并且然后在释放按钮被致动时释放以驱动活塞杆。替代地,排出机构可以是完全手动的,在该情况下剂量构件和致动按钮在对应于设定剂量大小的剂量设定期间向近侧移动,并且然后由使用者向远侧移动以排出设定剂量,例如,与在Novo Nordisk A/S制造和销售的
尽管图1示出了预装类型的药物递送装置,即,其被提供有预装筒并且在已排空筒时被丢弃,在替代实施例中,药物递送装置可以设计成允许装载筒被更换,例如以“后装式”药物递送装置的形式,其中筒保持器适于从装置主要部分移除,或者替代地以“前装式”装置的形式,其中筒通过不可移除地附接到装置的主要部分的筒保持器中的远侧开口插入。
由于本发明涉及适于与药物递送装置相互作用的电子电路,因此将描述这样的装置的示例性实施例以更好地理解本发明。
图2示出了图1中所示的笔形药物递送装置100的分解图。更具体地,笔包括具有窗口102的管状壳体101,筒保持器110固定地安装到所述管状壳体上,药物填充筒113布置在筒保持器中。筒保持器设置有允许针头组件116可释放地安装的远侧联接装置115,两个相对突起111的形式的近侧联接装置,其允许帽107可释放地安装以覆盖筒保持器和安装的针头组件,以及防止笔例如在桌面上滚动的突起112。在壳体远端中固定地安装螺母元件125,螺母元件包括中心螺纹孔126,并且在壳体近端中固定地安装具有中心开口的弹簧基部构件108。驱动系统包括螺纹活塞杆120,其具有两个相对的纵向凹槽并且接收在螺母元件螺纹孔中,旋转地布置在壳体中的环形活塞杆驱动元件130,以及与驱动元件(见下文)旋转接合的环形离合器元件140,接合允许离合器元件的轴向运动。离合器元件设置有外花键元件141,其适于接合壳体内表面上的对应花键104(参见图3B),这允许离合器元件在花键接合的旋转锁定近侧位置和花键脱离接合的旋转自由远侧位置之间移动。如刚才所述,在两个位置,离合器元件旋转地锁定到驱动元件。驱动元件包括中心孔,所述中心孔具有与活塞杆上的凹槽接合的两个相对突起131,由此驱动元件的旋转导致活塞杆的旋转,并且由此由于活塞杆和螺母元件之间的螺纹接合而导致活塞杆的远侧轴向运动。驱动元件还包括一对相对的沿周向延伸的挠性棘轮臂135,其适于接合布置在壳体内表面上的对应棘齿105。驱动元件和离合器元件包括配合联接结构,所述配合联接结构将它们旋转地锁定在一起并且允许离合器元件轴向移动,这允许离合器元件轴向移动到其远侧位置,在所述远侧位置允许其旋转,由此将拨盘系统(见下文)的旋转运动传递到驱动系统。将参考图3A和3B更详细地示出和描述离合器元件、驱动元件和壳体之间的相互作用。
在活塞杆上螺纹地安装内容物终止(EOC)构件128,并且在远端上旋转地安装垫圈127。EOC构件包括一对相对的径向突起129,用于与重置管(见下文)接合。
拨盘系统包括棘轮管150、重置管160、刻度鼓170,其具有形成一排剂量标记的外螺旋排列图案、使用者操作的拨盘构件180,用于设定待排出的药物剂量、释放按钮190,和扭矩弹簧155(见图3)。拨盘构件设置有接合布置在重置管上的多个对应外齿161的圆周内齿结构181,这提供当重置管在剂量设定期间在近侧位置时处于接合状态并且当重置管在剂量排出期间朝远侧移动时处于脱离状态的拨盘联接件。重置管轴向锁定地安装在棘轮管内部,但允许旋转几度(见下文)。重置管在其内表面上包括两个相对的纵向凹槽169,其适于与EOC构件的径向突起129接合,由此EOC可以由重置管旋转但允许轴向移动。离合器元件轴向锁定地安装在棘轮管150的外远端部分上,这使得棘轮管可以经由离合器元件轴向地移入和移出与壳体的旋转接合。拨盘构件180轴向锁定但旋转自由地安装在壳体近端上,拨盘环在正常操作下旋转地锁定到重置管(见下文),由此拨盘环的旋转导致重置管160和由此棘轮管的相应旋转。释放按钮190轴向锁定到重置管但旋转自由。复位弹簧195在按钮及其安装的重置管上提供向近侧指向的力。刻度鼓170布置在棘轮管和壳体之间的圆周空间中,鼓经由配合纵向花键151、171旋转地锁定到棘轮管,并且经由配合螺纹结构103、173与壳体的内表面旋转螺纹接合,由此当鼓通过棘轮管相对于壳体旋转时,该行数字通过壳体中的窗口102。扭矩弹簧布置在棘轮管和重置管之间的圆周空间中,并且在其近端处固定到弹簧基部构件108并且在其远端处固定到棘轮管,由此当棘轮管通过拨盘构件的旋转相对于壳体旋转时弹簧应变。具有挠性棘轮臂152的棘轮机构设置在棘轮管和离合器元件之间,后者设置有内圆周齿结构142,每个齿提供棘轮止动件,使得棘轮管保持在当设定剂量时使用者经由重置管将其旋转到的位置。为了允许减小设定剂量,棘轮释放机构162设置在重置管上并作用在棘轮管上,这允许通过在相反方向上转动拨盘构件将设定剂量减少一个或多个棘轮增量,当重置管相对于棘轮管旋转上述几度时,释放机构被致动。
已描述了排出机构的不同部件及其功能关系,接下来将主要参考图3A和3B来描述该机构的操作。
笔机构可以被认为是两个相互作用的系统、剂量系统和拨盘系统,如上所述。在剂量设定期间,拨盘机构旋转并且加载扭转弹簧。剂量机构锁定到壳体并且不能移动。当按下按钮时,剂量机构从壳体释放,并且由于与拨盘系统的接合,扭转弹簧现在将拨盘系统旋转回到起始点并随之旋转剂量系统。
剂量机构的中心部分是活塞杆120,活塞的实际位移由活塞杆执行。在剂量递送期间,活塞杆通过驱动元件130旋转,并且由于与固定到壳体的螺母元件125的螺纹相互作用,活塞杆在远侧方向上向前移动。在橡胶活塞和活塞杆之间放置活塞垫圈127,所述活塞垫圈用作旋转活塞杆的轴向轴承并均衡橡胶活塞上的压力。由于活塞杆在活塞杆驱动元件与活塞杆接合的位置处具有非圆形横截面,因此驱动元件旋转地锁定到活塞杆,但沿着活塞杆轴线自由移动。因此,驱动元件的旋转导致活塞的线性向前运动。驱动元件设置有防止驱动元件顺时针(从按钮端看)旋转的小棘轮臂134。由于与驱动元件的接合,活塞杆因此只能向前移动。在剂量递送期间,驱动元件逆时针旋转,并且棘轮臂135由于与棘齿105的接合而向使用者提供小弹响,例如每排出胰岛素的一个单位弹响一次。
转向拨盘系统,通过转动拨盘构件180来设定和重置剂量。当转动拨盘时,重置管160、EOC构件128、棘轮管150和刻度鼓170都由于拨盘联接件处于接合状态而随之转动。当棘轮管连接到扭矩弹簧155的远端时,弹簧被加载。在剂量设定期间,由于与离合器元件的内齿结构142的相互作用,棘轮的臂152对拨选的每个单位执行拨盘弹响。在所示实施例中,离合器元件设置有24个棘轮止动件,对于相对于壳体的完整360度旋转提供24次弹响(增量)。弹簧在组装期间被预加载,这使得该机构能够在可接受的速度区间内递送小剂量和大剂量。由于刻度鼓与棘轮管旋转接合,但在轴向方向上可移动,并且刻度鼓与壳体螺纹接合,因此在转动拨盘系统时刻度鼓将以螺旋形图案移动,数字对应于显示在壳体窗口102中的设定剂量。
棘轮管和离合器元件140之间的棘轮152、142防止弹簧使部件回转。在重置期间,重置管移动棘轮臂152,由此一个弹响接着一个弹响释放棘轮,在所述实施例中一次弹响对应于胰岛素的一个单位IU。更具体地,当拨盘构件顺时针转动时,重置管简单地旋转棘轮管,允许棘轮的臂自由地与离合器元件中的齿结构142相互作用。当拨盘构件逆时针转动时,重置管直接与棘轮弹响臂相互作用,朝向笔的中心远离离合器中的齿推动弹响臂,因此由于加载的弹簧引起的扭矩允许棘轮上的弹响臂向后移动“一个弹响”。
为了递送设定剂量,按钮190由使用者在远侧方向上推动,如图3B中所示。拨盘联接件161、181脱离并且重置管160从拨盘构件分离并且随后离合器元件140脱离壳体花键104。现在拨盘机构与驱动元件130一起返回到“零”,这导致药物剂量被排出。通过在药物递送期间的任何时间释放或按下按钮,可以随时停止和开始剂量。小于5IU的剂量通常不能暂停,原因是橡胶活塞非常快地被压缩,导致橡胶活塞的压缩并且随后在活塞返回到原始尺寸时递送胰岛素。
EOC特征防止使用者设定比筒中剩余的剂量更大的剂量。EOC构件128旋转地锁定到重置管,这使EOC构件在剂量设定、重置和剂量递送期间旋转,在此期间它可以跟随活塞杆的螺纹轴向地来回移动。当它到达活塞杆的近端时提供止动件,这防止所有连接部件(包括拨盘构件)在剂量设定方向上进一步旋转,即,现在设定的剂量对应于筒中剩余的药物内容物。
刻度鼓170设置有远侧止动表面174,所述远侧止动表面适于接合壳体内表面上的对应止动表面,这为刻度鼓提供了最大剂量止动,从而防止所有连接部件(包括拨盘构件)在剂量设定方向上进一步旋转。在所示实施例中,最大剂量设定为80IU。相应地,刻度鼓设置有近侧止动表面,所述近侧止动表面适于接合弹簧基部构件上的对应止动表面,这防止所有连接部件(包括拨盘构件)在剂量排出方向上进一步旋转,由此为整个排出机构提供“零”止动。
为了防止在拨选机构中出现故障而允许刻度鼓移动超出其零位置的情况下意外过量,EOC构件用于提供安全系统。更具体地,在具有满筒的初始状态下,EOC构件定位在与驱动元件接触的最远侧轴向位置。在已排出给定剂量之后,EOC构件将再次定位成与驱动元件接触。相应地,如果机构试图递送超过零位置的剂量,则EOC构件将锁定驱动元件。由于机构的不同部件的公差和挠性,EOC将行进短距离,允许排出小的“过量”药物,例如,3-5IU的胰岛素。
排出机构还包括剂量终止(EOD)弹响特征,其在排出剂量终止时提供不同的反馈,通知使用者已排出全部量的药物。更具体地,EOD功能通过弹簧基部和刻度鼓之间的相互作用来实现。当刻度鼓返回到零时,弹簧基部上的小弹响臂106由前进的刻度鼓向后推动。刚好在“零”之前,臂被释放并且臂撞击刻度鼓上的埋头表面。
所示机构还设置有扭矩限制器,以便保护机构免受使用者经由拨盘构件施加的过载。该特征由拨盘构件和重置管之间的接口提供,如上所述,拨盘构件和重置管旋转地彼此锁定。更具体地,拨盘构件设置有圆周内齿结构181,所述圆周内齿结构接合多个对应的外齿161,后者布置在重置管的挠性承载部分上。重置管齿设计成传递给定的指定最大扭矩,例如150-300Nmm,高于所述最大扭矩挠性承载部分和齿将向内弯曲并使拨盘构件转动而不旋转拨盘机构的其余部分。因此,笔内部的机构不能以比扭矩限制器通过齿传递的更高负载受到应力。
已描述了机械药物递送装置的工作原理,将描述本发明的实施例。
图4A和图4B示出了预装笔形药物递送装置200的第一组件和由此适配的附加剂量记录装置300的示意图。附加装置适于安装在笔装置壳体的近端部分上并且设置有剂量设定和剂量释放装置380,所述剂量设定和剂量释放装置在如图4B所示的安装状态下覆盖笔装置上的对应装置。在所示的实施例中,附加装置包括联接部分385,所述联接部分适于轴向和旋转锁定地安装在药物递送壳体上。附加装置包括可旋转剂量设定构件380,所述可旋转剂量设定构件在剂量设定期间直接或间接地联接到笔剂量设定构件280,使得附加剂量设定构件在任一方向上的旋转运动被传递到笔剂量设定构件。为了减少剂量排出和剂量大小确定期间来自外部的影响,可以在剂量排出期间将外附加剂量设定构件380与笔剂量设定构件280旋转地分离,如将参考图5实施例更详细地描述。附加装置还包括剂量释放构件390,所述剂量释放构件可以向远侧移动从而致动笔释放构件290。如下面将参考图5更详细地描述,由使用者夹持并旋转的附加剂量设定构件可以与笔壳体旋转接合地直接附接到笔壳体。
替代地,所示的构造可以适于主要用于帮助灵活性受损的人设定和释放药物的剂量,因此省去任何剂量感测和剂量记录功能。对于这样的构造,在剂量排出期间外附加剂量设定构件与笔剂量设定构件280旋转地分离是不重要的。相应地,外附加剂量设定构件可以与笔剂量设定构件280永久旋转接合。
转到图5,将更详细地描述适于安装在笔形药物递送装置100上的附加剂量记录装置400的第一示例性实施例。药物递送装置基本上对应于参照图1-3描述的药物递送装置并因此包括:壳体101;允许使用者设定待排出的药物的剂量的可旋转剂量设定构件180;在近侧剂量设定位置和远侧剂量释放位置之间可致动的释放构件190;刻度鼓170;以及重置管160。为了与附加记录装置协作,药物递送装置已被修改成包括附接到重置管近端或与重置管近端一体形成的大体环形示踪磁体160M,该磁体用作在排出剂量期间旋转的指示器,旋转运动量指示排出剂量的大小。此外,壳体已在剂量设定构件的远侧设置有圆周凹槽101G,所述圆周凹槽用作用于附加装置的联接装置。
附加装置包括可释放地可附接到药物递送装置壳体的外组件410以及内组件480。内和外组件在剂量设定期间彼此旋转地锁定,但是在剂量排出期间彼此旋转地分离。所示的实施例基于实验原型,由于该原因,一些结构由许多组装部分形成。
外组件410包括大体圆柱形的壳体构件411,所述壳体构件限定用于附加装置的主轴线并且用作附加剂量设定构件,适于与笔壳体的联接凹槽101G接合的远侧布置的联接装置415,以及联接到壳体构件411并且在初始近侧位置和致动远侧位置之间轴向可移动的近侧布置的剂量释放构件490。在所示的实施例中,联接装置415为多个弹簧偏压联接构件的形式,当附加装置在药物递送装置100的近端上滑动时,所述多个弹簧偏压联接构件适于通过卡扣动作可释放地接收在壳体凹槽101G中,连接装置由此将附加装置轴向地锁定到笔装置。可以通过例如拉动动作或通过释放机构的致动来释放联接装置。壳体在近侧部分中包括内圆周凸缘412和多个轴向定向的引导凹槽413。剂量释放构件490包括接收在引导凹槽413中的多个圆周布置的轴向定向的凸缘493,凹槽提供近侧止动件,剂量释放构件通过支撑在壳体凸缘412和剂量释放构件490之间的第一复位弹簧418偏压抵靠所述近侧止动件。剂量释放构件包括具有远侧内凸缘部分494的内圆柱形裙部492,内凸缘部分包括远侧圆周唇边495和轴向定向的锁定花键496的近侧阵列。
内组件480包括内壳体481和布置在其中的传感器模块460的形式的轴向可移动的传感器系统。内壳体包括近侧壁部分482,中空传输管483从所述近侧壁部分向近侧延伸,用作第二偏压弹簧468的支撑件的内圆周凸缘部分484,以及设置有多个轴向定向的内突起的向远侧延伸的圆周裙部487,所述多个轴向定向的内突起适于接收在笔剂量设定构件驱动凹槽182(见图1A)中,由此将两个构件彼此旋转地锁定,接合在附加装置的安装和操作期间允许一定的轴向游隙。替代地,裙部487可以设置有下述类型的径向向内偏压的驱动结构。中空管483在近端处包括盘形部分,所述盘形部分具有适于接合圆周唇边495的面向远侧的止动表面和适于接合剂量释放构件490上的锁定花键496的轴向定向花键486的圆周阵列,由此将内组件旋转地锁定到剂量释放构件和因此外组件。
传感器模块460包括传感器部分和向近侧延伸的致动杆部分462。传感器部分包括大体圆柱形的传感器壳体461,在其中布置有电子电路465(在图5中示意性地示出)。传感器壳体包括适于与笔致动构件190接合的远侧致动表面。在初始剂量设定模式下(即,在剂量释放构件490处于初始近侧位置的情况下),传感器壳体由第二偏压弹簧468向近侧偏压成与内壳体近侧壁部分482接合,并且在致动杆462从传输管483延伸到剂量释放构件490的内部的情况下,在致动杆的近端463和剂量释放构件的内致动表面之间形成轴向间隙。
电子电路465包括电子部件,所述电子部件包括处理器装置,一个或多个传感器,一个或多个开关,无线发射器/接收器装置和能量源。传感器包括一个或多个磁力计,所述磁力计适合于测量由笔示踪磁体160M生成的磁场,这允许允许确定笔重置管的旋转运动并因此确定排出剂量的大小,例如参见WO2014/161952。可以提供另外的传感器装置以允许识别装置的类型,例如适于确定笔释放构件的颜色的发光器和颜色传感器,颜色用作预装笔装置中包含的药物类型的标识。处理器装置可以是通用微处理器或ASIC,诸如提供用于嵌入式程序代码的存储的ROM的非易失性程序存储器,诸如用于数据的闪存和/或RAM的可写存储器,以及用于发射器/接收器的控制器的形式。
在与安装在笔式药物递送装置100上的附加装置400的一起使用的情况下,如图5中所示,使用者通过旋转壳体构件411(即,附加剂量设定构件)以及剂量释放构件490来开始设定期望剂量。在剂量设定期间,剂量释放构件朝其初始近侧位置偏压,由此其经由锁定花键486、496旋转地锁定到内组件480,这允许附加剂量设定构件的旋转运动传递到内壳体461并因此传递到笔剂量设定构件180。
当已设定剂量时,使用者将通过使剂量释放构件490抵抗第一偏压弹簧418的力向远侧移动来致动所述剂量释放构件。在初始释放运动期间,锁定花键486、496将脱离,这将使内组件480从剂量释放构件并因此从附加剂量设定壳体构件411旋转地分离。在进一步释放运动期间,剂量释放构件490接合致动杆近端463,由此在进一步释放运动期间传感器模块460将向远侧朝向笔剂量释放构件190移动并且随后与笔释放构件接触。致动杆462和附加剂量释放构件490的接合表面被优化以最小化旋转运动的传递。最终,附加释放构件490的进一步向远侧运动将导致笔释放构件190的致动并由此排出设定剂量,由此传感器模块460用作致动器。
为了确定排出剂量的大小,确定示踪磁体160M和因此重置管160的旋转量。更具体地,传感器模块的初始运动将激活传感器开关(未示出),所述传感器开关继而将激活传感器电子装置465并开始从磁力计采样数据,这允许在释放排出机构之前确定示踪磁体160M的旋转开始位置。在该时段期间,还可以确定笔释放构件的颜色并因此确定包含在筒中的药物的类型。由于重置管在排出药物的积累期间可以旋转超过360度,因此将检测到排出期间的旋转运动并确定完整旋转的数量(如果有)。当检测到重置管的旋转已停止时,例如当设定剂量已完全排出时或当用户暂停给药时,将确定旋转结束位置,这允许确定排出剂量的大小。替代地,当传感器开关检测到传感器模块460已返回到其初始位置时,可以确定旋转结束位置。
如图所示,由于在药物排出期间内组件460与外组件480的旋转分离,在很大程度上防止了附加装置的外部分的运动将对重置管160的旋转运动和旋转位置的精确确定产生负面影响。
确定的剂量大小(或可以随后计算剂量大小所基于的数据)将与时间戳以及如果检测到的药物类型标识一起存储在日志存储器中。然后可以通过NFC、
转到图6,将更详细地描述适于安装在笔形药物递送装置600上的附加剂量记录装置700的第二示例性实施例。药物递送装置基本上对应于参照图1-3描述的药物递送装置,并且因此包括:壳体601;允许使用者设定待排出的药物的剂量的可旋转剂量设定构件680;在近侧剂量设定位置和远端剂量释放位置之间可致动的释放构件690;刻度鼓670;以及重置管660。为了与附加记录装置700协作,药物递送装置已被修改为包括附接到重置管近端或与重置管近端一体形成的大体环形的磁体660M,磁体用作在排出剂量期间旋转的指示器,旋转运动量指示排出剂量的大小。此外,壳体近侧部分602已在剂量设定构件的远侧设置有多个突起601P,所述突起用作用于附加装置的联接装置。在所示的实施例中,三个联接突起等距地位于壳体上。
附加装置700包括可释放地可附接到药物递送装置壳体的外组件710以及内组件(见下文)。外组件710包括限定附加装置的主轴线的大体圆柱形的远侧联接部分719(如图4A的实施例中那样),联接部分具有大体圆柱形腔孔7xx,其适于接收药物递送笔的对应的大体圆柱形联接部分并且适于通过多个卡口联接结构715轴向和旋转锁定地安装在药物递送壳体上,所述卡口联接结构适于与笔壳体上的对应联接突起601P接合并且可释放地卡扣接合。附加装置还包括可自由旋转地安装在联接部分上的近侧剂量设定构件711,并且其类似于图5的实施例联接到笔剂量设定构件680,使得附加剂量设定构件711在任一方向上的旋转运动被传递到笔剂量设定构件。附加装置还包括剂量释放构件790,所述剂量释放构件在剂量设定期间与剂量设定构件一起旋转。支撑在剂量设定构件上的内圆周凸缘712上的第一偏压弹簧718在剂量释放构件上提供近侧指向的偏压力。如在图5的实施例中,内组件和外组件在剂量设定期间彼此旋转地锁定,但是在剂量排出期间彼此旋转地分离。
内组件780大体对应于图5实施例的内组件480,因此大体包括提供相同功能的相同结构。相应地,内组件包括(见图7A)内壳体781和布置在其中的轴向可移动的传感器模块760。内壳体包括近侧壁部分782,中空传输管结构783从所述近侧壁部分向近侧延伸,用作第二偏压弹簧768的支撑件的远侧内圆周凸缘部分784,以及向远侧延伸的圆周裙部787,所述圆周裙部适于接合笔剂量设定构件驱动凹槽682(见图6),由此将两个构件彼此旋转地锁定,接合允许附加装置的安装和操作期间允许一定的轴向游隙。在所示的实施例中,接合剂量设定构件驱动凹槽682的结构为挠性指状件751的形式,允许容易安装,如将在下面更详细地描述。指状件可以如图所示安装到裙部787,例如形成为金属片部件的一部分,或者它们可以与裙部一体形成。中空管783在近端处包括多个凸缘部分788,所述凸缘部分具有适于与剂量释放构件790的圆周内凸缘795接合的面向远侧的止动表面,以及适于与剂量释放构件790上的锁定花键796接合的多个轴向定向的花键,由此将内组件旋转地锁定到剂量释放构件和因此外组件。
传感器模块760包括传感器部分和向近侧延伸的致动杆部分762。传感器部分包括大体圆柱形的传感器壳体761,在其中布置有电子电路765(见下文)。传感器壳体包括覆盖磁体传感器并适于接合笔致动构件690的远侧间隔帽764。在初始剂量设定模式下(即,在剂量释放构件790处于初始近侧位置的情况下),传感器壳体由第二偏压弹簧768向近侧偏压成与内壳体近侧壁部分782接合,并且在致动杆762从传输管783延伸到剂量释放构件790的内部的情况下,在致动杆的近端763和剂量释放构件的内致动表面之间形成轴向间隙。
电子电路765包括电子部件,所述电子部件包括处理器装置,传感器,激活开关,例如由施加在致动杆部分762上的轴向力致动的圆顶开关,无线发射器/接收器装置和能量源。更具体地,在所示的实施例中,电子电路765包括分层结构,从远端开始,所述分层结构包括其上布置有许多传感器部件(例如磁力计766M)的第一PCB 766A,用于一对纽扣电池的一对电池连接器盘766B,其上安装有大多数电子部件(例如处理器,发射器/接收器和存储器)的第二PCB 766C,以及带有允许致动杆部分762接触并致动安装在PCB上的致动开关766S的槽的上盘766D,五个构件通过柔性带状连接器互连。
传感器包括多个磁力计,所述磁力计适于测量由笔磁体660M生成的磁场,这允许确定笔重置管的旋转运动并因此确定排出剂量的大小,例如参见WO 2014/0161952。可以提供另外的传感器装置以允许识别装置的类型,例如适于确定笔释放构件的颜色的发光器和颜色传感器,颜色用作预装笔装置中包含的药物类型的标识。颜色传感器和发光器可以在可见光(人眼可见)或完全或部分在可见光谱之外的光下工作。处理器装置可以是通用微处理器或ASIC,诸如提供用于嵌入式程序代码的存储的ROM的非易失性程序存储器,诸如用于数据的闪存和/或RAM的可写存储器,以及用于发射器/接收器的控制器的形式。
在与安装在笔式药物递送装置600上的附加装置700一起使用的情况下,使用者通过旋转剂量设定构件711(即附加剂量设定构件)以及剂量释放构件790来开始设定期望剂量。在剂量设定期间,剂量释放构件朝其初始近侧位置偏压,由此其经由锁定花键786、796旋转地锁定到内组件780,这允许附加剂量设定构件的旋转运动传递到内壳体761并因此传递到笔剂量设定构件680。
当已设定剂量时,使用者将通过使剂量释放构件790抵抗第一偏压弹簧718的力向远侧移动来致动所述剂量释放构件。在初始释放运动期间,锁定花键786、796将脱离,这将使具有电子器件的内组件780与剂量释放构件790并因此与附加剂量设定构件711旋转地分离。在进一步的释放运动期间,剂量释放构件790接合致动杆近端763(见图8A),由此传感器模块760在进一步的释放运动期间将朝向笔释放构件690向远侧运动,并且随后与笔释放构件接触(见图8B)。致动杆762和附加剂量释放构件790的接合表面被优化以最小化旋转运动的传递。最终,附加释放构件790的进一步向远侧运动将导致笔释放构件690的致动(见图8C,其中重置管外齿661已向远侧移动)并且由此排出设定剂量(见图8D),传感器模块760由此用作致动器。
为了确定排出剂量的大小,确定磁体660M和因此重置管660的旋转量。更具体地,传感器模块的初始运动将激活传感器开关,所述传感器开关又将激活传感器电子器件765并开始从磁力计采样数据,这允许在释放排出机构之前确定磁体660M的旋转开始位置。在该时段期间,还可以确定笔释放构件的颜色并因此确定包含在筒中的药物的类型。由于重置管660在排出药物的剂量期间可以旋转超过360度,因此将检测到排出期间的旋转运动并确定完整旋转的数量(如果有)。当检测到重置管的旋转已停止时,例如当设定剂量已完全排出时或当用户暂停给药时,将确定旋转结束位置,这允许确定排出剂量的大小。替代地,当传感器开关检测到传感器模块760已返回到其初始位置时,可以确定旋转结束位置。
如图所示,由于在药物排出期间内组件760与外组件780的旋转分离,在很大程度上防止了附加装置的外部分的运动将对重置管660的旋转运动和旋转位置的精确确定产生负面影响。
转到图9,将更详细地描述适于安装在笔形药物递送装置800上的附加剂量记录装置900的第三示例性实施例。将参照10A和10B描述稍微修改的药物递送笔装置800。
附加剂量记录装置900基本上对应于参照图6-8描述的附加剂量记录装置600,并且因此包括可释放地可附接到药物递送装置壳体的外组件,带有传感器模块的内组件以及释放构件组件。与上述实施例相反,图9的分解图示出了由其形成组件的单独的部件。
外组件由远侧壳体联接部分901,与其可附接的近侧壳体部分919,适于可自由旋转地安装在近侧壳体部分上的附加剂量设定构件911以及适于安装在剂量设定构件中以封闭释放构件组件的锁定环916形成。锁定组件包括释放滑动件908,捕捉构件905,偏压弹簧906以及用于滑动件的一对复位螺旋弹簧909,锁定组件部件适合于安装在壳体联接部分901中。
更具体地,远侧壳体联接部分901包括圆柱形腔孔902,所述腔孔适于以贴合配合的方式接收药物递送笔装置的对应的圆柱形联接部分(见下文)。该腔孔设置有面向远侧且轴向定向的凹槽,在将附加装置轴向安装在笔装置上时所述凹槽适于接收笔壳体的锁定突起805。远侧壳体联接部分的近侧部分向外渐变到更大直径并且包括多个纵向肋907,每个纵向肋具有面向近侧的端表面,该端表面用作内组件的远侧止动件。联接部分901适于在安装时覆盖笔装置显示窗口并且因此包括窗口开口904,允许观察显示窗口并因此观察刻度鼓。与窗口开口相对设置有第二开口903,所述第二开口适于接收锁定组件部件。捕捉构件905可枢转地安装在第二开口中并通过偏压弹簧906向内偏压,这在将附加装置轴向安装在笔装置上时允许捕捉构件在笔壳体锁定突起805的远侧卡扣就位。由于锁定装置与窗口开口904相对布置,因此确保了用户在安装期间可以容易地使附加装置旋转地定向。释放滑动件908滑动地安装在第二开口中并通过复位弹簧909在远侧方向上偏压。当用户向近侧移动释放滑动件时,这将捕捉构件905提升脱离与壳体锁定突起805的接合,从而允许附加装置向近侧移动并因此从笔装置移除。近侧壳体部分919通过例如焊接,粘合剂或卡扣装置固定地附接到联接部分901,并且包括圆周脊917以允许剂量设定构件911通过卡扣动作可自由旋转地安装。剂量设定构件包括在组装状态下用作内组件的近侧止动件和释放构件复位弹簧918的远侧止动件的圆周内凸缘912,以及形成释放构件组件的多个引导轨道913的多个轴向延伸的内凸缘。锁定环916适于通过例如焊接,粘合剂或如图所示的卡扣装置轴向固定地安装在剂量设定构件中,由此密封剂量设定构件911和帽构件998之间的间隙。
内组件包括大体圆柱形的内壳体构件981,适于安装在内壳体构件上的圆柱形锁定构件950,以及适于附接到内壳体构件以在其中封闭安装的传感器模块的近侧壁或盖构件982。壁构件包括适合于接收近侧凸缘构件988的近侧延伸的管部分983。
更具体地,内壳体构件981包括具有多个开口989的较大直径的远侧裙部987,具有多个轴向延伸的壁部段985的较小直径的近侧部分,所述壁部段形成用于传感器模块的多个引导轨道。两个部分之间的过渡形成用于传感器弹簧968(见下文)的外圆周远侧支撑件984。在所示的实施例中,圆柱形锁定构件950由单件金属片形成,其中形成第一多个轴向延伸的挠性拨盘锁定臂951,每个锁定臂具有径向向内延伸的近侧自由端部分,以及第二多个轴向延伸的挠性安装臂955,每个安装臂具有径向向内延伸的近侧自由端部分。当将锁定构件安装在内壳体构件981上时,安装臂用于与相应的安装开口989卡扣接合,这轴向和旋转地锁定两个构件。拨盘锁定臂951的远端向内倒圆并适于接合笔剂量设定构件驱动凹槽882(见下文)。近侧壁构件982适于通过例如焊接,粘合剂或卡扣装置固定地附接到内壳体凸缘,并在组装状态下用作传感器模块的近侧止动件。近侧延伸管部分983在近端处包括一对相对的径向延伸部,每个径向延伸部包括多个轴向定向的锁定花键986,所述锁定花键适于在组装状态下接合释放构件上的相应花键。近侧凸缘构件988适于通过例如焊接,粘合剂或如图所示的卡扣装置固定地附接到管部分983。凸缘构件包括中心腔孔,所述中心腔孔具有小于致动杆962的远侧较大直径的端部的直径(见下文),这提供致动杆的近侧止动件。
传感器模块960包括其中安装具有面向远侧的传感器部件的电子电路965的大体圆柱形的传感器壳体961,适于安装在传感器模块壳体远端上以覆盖和封闭传感器部件的间隔帽964,以及适于布置在壁构件管部分983中的致动杆962。传感器模块复位弹簧968适于布置在内壳体构件981和传感器壳体961之间以在传感器模块上提供近侧指向的偏压力。
更具体地,间隔帽964适于通过例如焊接,粘合剂或卡扣装置固定地附接到传感器壳体,并且在组装状态下用于保护传感器部件并用作适于接合笔装置释放构件890的面向远侧的接触表面(见图13A)。传感器壳体包括多个径向突出的远侧和近侧引导凸缘967,所述引导凸缘适于非旋转地但轴向自由地接收在内壳体构件引导轨道中。远侧引导凸缘还提供用于传感器弹簧968的近侧止动表面。用于传感器模块的远侧止动件由对应于引导轨道的远端和/或压缩传感器弹簧的内壳体提供。致动杆962包括允许该杆自由地接收在管部分983中的较大直径的远侧部分和适于通过凸缘构件988中的腔孔突出的较小直径的近侧部分。致动杆包括倒圆的近端963,致动杆和帽构件998的接合表面被优化以最小化旋转运动的传递。传感器模块包括适于由致动杆致动的面向近侧的中心布置的致动开关966,例如,圆顶开关。
释放构件组件包括主体构件990和其上可安装的帽构件998。释放构件复位弹簧918适于布置在剂量设定构件凸缘912和释放主体构件990之间以在释放主体构件上提供近侧指向的偏压力。
更具体地,释放主体构件990包括远侧环部分994,所述远侧环部分具有适于在组装状态下接合管部分983上的锁定花键986的轴向定向花键996的内圆周阵列,以及适于非旋转地但轴向自由地接收在剂量设定构件引导轨道913中的多个径向突出的引导凸缘993。帽构件998适于通过例如焊接,粘合剂或如图所示的卡扣装置995轴向固定地附接到主体构件。在组装状态下,凸缘构件988用作释放主体构件990的近侧止动件,并且释放构件复位弹簧918作用在环部分远侧表面上。
转到图10A和10B,示出了稍微修改的笔式药物递送装置800的近侧部分与在附加装置和笔剂量设定构件之间提供旋转接合的附加装置内组件的各部分的组合。
更具体地,笔壳体801大体对应于图6的实施例,然而,代替略呈锥形的壳体,包括窗口809的壳体的近侧联接部分802具有适于接收在附加装置的圆柱形腔孔中的“真实”圆柱形形式。替代地,两个结构都可以具有光锥形。此外,联接装置为适于与捕捉构件905协作以易于轴向安装的单个锁定突起805的形式。还示出了具有大体圆柱形外表面881的剂量设定构件880(即,剂量设定构件可以是略微锥形的),在所示的实施例中,所述大体圆柱形外表面通过包括多个轴向定向的细凹槽而被纹理化以改善剂量设定期间的手指夹持,以及通过包括对应于图6的实施例的多个轴向定向的驱动凹槽882而被纹理化。
如以上参照图9A和9B所述,内组件包括壳体构件981,所述构件具有带有多个开口989的远侧裙部987,以及安装在其上的圆柱形锁定构件950,该锁定构件包括多个挠性拨盘锁定臂951和多个挠性安装臂(在图10A和10B中未示出后者)。
在图10A中,示出了内壳体981处于其轴向安装位置(由附加装置的未示出部分确定)。尽管外附加壳体901安装在旋转预定位置,但对于内壳体组件情况并非如此,在未安装状态下允许所述内壳体组件相对于外壳体自由旋转,这提供了内壳体和因此锁定臂951安装在“随机”旋转位置,使得锁定臂不与剂量设定构件驱动凹槽882旋转对齐。另外,尽管剂量设定构件880具有对应于未设定剂量的初始“停放”旋转“零”位置,但它可能已在随机位置设定。另外,即使当停放在零位置时,剂量设定机构中的松弛也可能导致剂量设定构件驱动凹槽的旋转位置的微小变化。
因此,当将附加装置安装在笔装置上时,挠性拨盘锁定臂951可能与剂量设定构件驱动凹槽882不旋转对齐。然而,由于拨盘锁定臂是挠性的,因此它们将通过剂量设定构件向外移动并与驱动凹槽平行地在剂量设定构件的外圆周上轴向滑动,这如图10A中所示。由于挠性锁定臂所提供的阻力小,因此用户在大多数情况下不会注意到附加装置的安装期间发生了什么,并且不会意识到附加装置尚未旋转接合笔装置剂量设定构件的事实。在所示的实施例中,锁定臂951的自由端朝近侧定向,然而,替代地,它们可以向远侧定向,其中锁定臂的自由端和笔装置剂量设定构件880的近侧边缘配置成在安装附加装置期间使锁定臂向外移动。
随后,当用户期望设定剂量时,用户将开始旋转附加装置剂量设定构件911并由此旋转具有锁定臂951的内壳体,然后所述锁定臂将旋转到与剂量设定构件驱动凹槽882对齐并因此允许向内挠曲以旋转地接合驱动凹槽,这如图10B中所示。为了确保锁定臂将容易地接合驱动凹槽,它们形成为略窄于驱动凹槽。然后附加装置剂量设定构件911的进一步移动将导致笔装置剂量设定构件相应地旋转,这允许用户照常设定和调节剂量。实际上,在许多情况下,锁定臂将直接移动到驱动凹槽中。
锁定臂951的数量和机械特性应当尺寸确定成允许附加装置的安全和稳固的操作。为了确保这一点,在用户试图拨到零以下或最大可设定剂量以上的情况下,组合组件(即笔装置和附加装置)可以包括超扭矩机构。对于附加装置,可以在内壳体组件和附加剂量设定构件之间的花键接合中并入超扭矩机构,然而,在大多数情况下,可以省却这种用于附加装置的机构,因为笔装置通常将设置有超扭矩保护机构,例如如
图11A和11B在横截面图中示出了已与笔装置剂量设定构件880的外圆周接合的锁定臂951已相应地接合笔装置剂量设定构件驱动槽882时。
转到图12A和12B,图9A的部件示出为处于对应于初始非安装和非致动状态的组装状态。
更具体地,图12A示出了传感器模块960,其布置在内组件内部并且通过作用在内壳体弹簧支撑件984和传感器壳体远侧引导凸缘967之间的传感器弹簧968朝其最近侧位置偏压。可以看到拨盘锁定臂951突出到内壳体裙部987的内部。释放主体构件990通过作用在剂量设定构件内凸缘912和释放主体构件的环部分994之间的释放构件复位弹簧918朝其最近侧位置偏压。致动杆962布置在内壳体管部分983的内部,并且通过凸缘构件988轴向保持在适当位置,在致动杆近端963和帽构件998的远侧表面之间形成轴向间隙。内壳体和释放构件组件经由管部分983和释放主体构件990之间的花键接合而彼此旋转地锁定(在图12A中看不到)。
参照图13A-13F,将描述与笔形药物递送装置800组合的附加剂量记录装置900的第三示例性实施例的不同操作状态。所示的笔装置是来自Novo Nordisk A/S的
图13A示出了在安装在笔形药物递送装置800上之前的附加剂量记录装置900。如上所述,药物递送装置包括近侧联接部分802,所述近侧联接部分具有适于接收在附加装置的圆柱形腔孔中的“真实”圆柱形形式,窗口809,适于与附加装置捕捉构件905协作的锁定突起805,具有大体圆柱形外表面881的剂量设定构件880,所述外表面具有多个轴向定向的驱动凹槽882,以及近侧布置的释放构件890。附加装置900包括适于接收笔装置的圆柱形联接部分802的圆柱形腔孔902,适于接合锁定突起805的捕捉构件905,以及布置成与笔装置窗口809对齐安装的窗口开口904,剂量设定构件911和剂量释放构件998。可以看到拨盘锁定臂951突出到腔孔902中。对应图12A,附加装置处于其初始未安装和未致动状态。
在图13B中,附加装置900已安装在笔装置800上,其中捕捉构件905位于锁定突起805的远侧并且两个窗口904、809对准。对应于图10A中所示的情况,拨盘锁定臂951尚未接合驱动凹槽882。
在图13C中,附加剂量设定构件911和由此内组件已旋转,拨盘锁定臂951已接合驱动凹槽882,并且已设定剂量。
在图13D中,附加剂量释放构件998已部分致动以仅接合致动杆倒圆近端963,在该状态下释放主体构件990上的轴向定向花键996的内圆周阵列已脱离管部分983上的锁定花键986,这使剂量设定构件911从内组件和因此传感器模块960旋转地分离。附加剂量释放构件998的进一步向远侧移动将使致动杆962开始向远侧移动,这初始将导致面向近侧的中心布置的致动开关966(见图9)由致动杆致动,这将传感器模块变为其操作状态。
在图13E中,附加剂量释放构件998已被进一步致动以仅使传感器模块间隔帽964移动到与笔装置释放构件890接合。
在图13F中,附加剂量释放构件998已被完全致动,并且传感器模块和由此笔装置释放构件890已移动到其最远侧操作位置,这释放排出机构,由此药物的设定剂量通过安装在装药筒上的中空针头排出。排出剂量大小的确定可以如以上参照图8A-8D所述进行。当设定剂量已排出时,用户可以释放附加剂量释放构件998上的压力,并且由于复位弹簧968、918,部件将返回其初始轴向位置。
已描述了图5、7A和12A的附加剂量记录装置的机械概念和工作原理,将更详细地描述传感器和示踪系统本身。基本上,传感器和示踪系统包括移动磁性示踪部件和包括一个或多个磁力计(例如3D指南针传感器)的传感器系统。
在示例性实施例中,磁性示踪部件为具有四个极的多极磁体(即四极磁体)的形式。在图14中四个偶极标准磁体661已等距地布置在环形示踪部件660M中,这四个独立的偶极磁体提供组合的四极磁体,其中四个极偏移90度。实际上,每个偶极磁体由在相同方向上定向的大量单独的磁性粒子形成。单独的磁体可以布置在相同的平面中或者可以彼此轴向偏移。
替代地,可以通过通过使用如图15A中所示的单独的强力磁体或通过使用如图15B中所示的电磁场磁化可磁化材料来产生多极磁体660M。
给定的传感器系统可以使用相对于示踪部件660M布置的例如4、5、6或8个磁力计766M,如图16中所示。传感器可以布置在相同平面中,例如,如图7B中所示,或者它们可以在轴向上彼此偏移。传感器越多,传感器之间的间距越小,因此可以收集具有更好信噪比的更多数据。然而,传感器越多,需要的数据处理就越多,功耗也就越大。
在一些情况下,不仅需要处理来自外部磁场的干扰。如上所述的用于驱动一次性装置中的剂量排出马达的扭矩提供弹簧在受到外部磁场时会被磁化并且因此提供内部干扰磁场。
在外部干扰可以通过信号处理算法在很大程度上消除的情况下,由于它们会或多或少相等地且在相同方向上影响所有传感器,因此磁化的扭矩弹簧将影响传感器,很像示踪磁体,因此更有可能抵消测量值并导致误差。
然而,从图17A和17B可以看出,使用四极示踪磁体代替偶极示踪磁体显著减小了确定示踪磁体的位置的误差。
更具体地,图17A和17B示出了对于剂量设定(DS)和给药(D)两者在四个不同的磁化水平(TS1-TS4)下磁化的扭矩弹簧的影响的模拟。图17A示出了对于与4传感器设置组合的偶极示踪磁体计算的角测量误差(即,计算角和真实角之间的差),并且图17B示出了对于与8传感器设置组合的四极示踪磁体计算的角测量误差。由于在给药期间传感器更靠近示踪磁体(参见例如图8A和8C),因此在给药期间角误差稍小。这就是说,在上述实施例中,传感器测量仅在给药期间进行。对于四极示踪磁体,使用8个传感器,原因是四极示踪磁体中的各极之间的较小圆周间距为传感器系统提供更高的输入速率,其可以由8个而不是4个传感器更精确地捕获,然而,对于与4传感器设置组合的四极示踪磁体可以预期可比较的结果。如图所示,使用四极示踪磁体可以将角误差从约4-8度降低至约0.5-1度,相差大约8倍。
在所示的
因此四极示踪磁体不仅降低了系统对外部磁场干扰的敏感性,而且还降低了对内部磁场干扰的敏感性。这是使用多极示踪磁体的重要方面,原因是通过使用含铁金属片对外部源进行的传统磁屏蔽可以用于减少外部磁场的影响,但可能无法装配在示踪磁体和内部干扰磁场之间。此外,包含磁屏蔽将占用空间并引入额外的成本。
替代地,这可以通过使用不可磁化材料的弹簧来减轻,然而,当今市场上当前弹簧驱动笔包括可磁化的扭矩弹簧,并且由于弹簧的其他要求,替换可能是不可行的。
已描述了包含旋转四极示踪磁体的传感器组件的结构设置,下面将描述确定这种组件的实际移动的示例性方法。
来自四极磁体的信号是周期性的,在磁体的一个完整旋转中有两个周期。这可以从图18看出,其中示出了切向、径向和轴向场水平。
映射信号的频率分量,可以看出来自磁体的几乎整个信号都适合于频率二信号,见图19。
为了确定在四极磁场中使用的剂量大小,必须确定四极磁体的静态起始角和终止角。由于在递送剂量之前和之后磁体都是静态的,因此在空间上对场进行采样而不是在时间上对场进行采样。在示例性实施例中,测量系统配置有N=7个具有圆形布局和相等间距的传感器,见图20,其示出了传感器766M相对于四极磁体660M的布置。
为了确定取向或磁体,对传感器中测量的场进行离散傅立叶变换(DFT)计算
这里B
如上所述,来自四极磁体的信号为周期n=2信号,因此我们可以通过观察
由于处于不同频率的正弦和余弦的样本是正交的,因此对信号的任何干扰(例如,周期n=0、1或3)都将通过傅立叶变换滤除。
这既涉及外部干扰,也涉及内部干扰。自动剂量笔式注射器中的内部部件是金属扭转弹簧以驱动剂量机构。在这被磁化的情况下,弹簧场在传感器位置将主要看起来像周期1信号。传感器附近的偶极磁体之类的外部干扰也趋向于具有周期0或1的信号。使用DFT,可以滤除其他频率的干扰,而仅从频率2信号确定磁体取向。
因此与其周期1信号与常见干扰的频率相似的偶极磁体相比,四极磁体和DFT的组合更优。
与基于查找的算法相比,使用基于DFT的算法提供了更大的自由来选择任意数量的传感器。由于奈奎斯特采样定理,传感器的选择数量优选地至少为5。可以自由和积极地使用除此之外的数量的传感器以滤除信号的特定频率以防止混叠效应。
参考上述的示例性实施例,已经描述了,传感器模块的初始运动将激活传感器开关,传感器开关又将激活传感器电子器件并开始从磁力计采样数据,这允许在释放排出机构之前确定磁体的旋转开始位置。当检测到重置管的旋转已停止时,例如当设定剂量已完全排出时或当用户暂停给药时,将确定旋转结束位置,这允许确定排出剂量的大小。替代地,当传感器开关检测到传感器模块已返回到其初始位置时,可以确定旋转结束位置。
采样频率应当选择成可靠地检测旋转移动,并尽可能是节能的。然而,在弹簧驱动型装置中给药期间对转速的分析已显示,重置管的转速不是恒定的。特别是,已发现在排出事件开始时,重置管的转速可能非常高。已找出高转速的两个原因。第一个原因是筒橡胶活塞在给药开始之前处于未压缩状态。当驱动弹簧中的能量突然释放时,橡胶活塞开始被压缩,然后开始在筒中向远侧移动。当筒中积聚足够压力时,活塞开始移动并且筒内容物开始流出针。柱塞的压缩发生得非常快,但在被压缩时速度减慢。
另一个原因是活塞杆和筒活塞之间存在气隙。例如,如果用户在使用后将针留在药物递送装置上,则可能出现这种情况,或者这可能由于循环温度而发生。由于没有来自橡胶活塞的反作用力,因此排出机构非常快地旋转,直到活塞杆碰到活塞,之后上述的活塞压缩开始。
当检测到部件旋转以便估计排出的剂量体积时,对所有旋转准确计数很重要。如果不能准确计数,这可能导致估计的剂量较小,可能使得使用者获取另一剂量并且出现严重剂量过大。
如果使用有源传感器例如通过测量磁场的变化来对部件的位置进行采样,那么高转速需要高采样频率以便观察所有旋转。然而,使用高采样频率可能非常耗电,并且可能采集大量数据需要存储。这会导致高功率使用和内存用完的问题。对于配备有不可替换能量源的存储器装置来说,这尤其是一个问题。相反,如果频率太低,信号的一个或多个周期可能未被检测到。这两种情形在图23A和图23B中分别示出。
要解决该问题,可以基于(i)对系统行为的了解,以及(ii)感测所测量部件的实际转速来使用动态采样方案。该系统预期的行为如下:从排出机构的快速旋转时段开始,随后是转速正常/中等的时段,并且在设定剂量已完全排出时以不旋转状态结束-或者用户已停止排出过程。因此,可实施适应性采样方案,其随着转速变化来适应模式且以高采样频率开始。
对应于上述实施例,在图24中示出了示例性使用情形。更具体地,在设定待排出的药物剂量之后,用户按下附加释放按钮,并且传感器模块的后续轴向行进触发传感器开关,并且开始连续采样和评估转速,其中采样频率最初设置为“高”。传感器模块随后接合笔释放按钮并释放笔排出机构。由于柱塞压缩和/或活塞和活塞杆之间的气隙,排出机构可以最初以高速旋转更短或更长的时段。当排出机构随后减慢时,可以检测到转速低于第一阈值(Threshold
在示例性实施例中,传感器电路以两种模式操作,即初始“跟踪模式”和后续“剂量模式”。开关激活后立即使用所有(此处为:7个)传感器拍摄“快照”,将表示旋转起始位置的测量值读取到存储器,然后使用采样周期0.9ms进入跟踪模式。
在“正常”操作期间,将进行以下操作:用户激活设定了剂量的装置,并以“正常”激活速度操作释放按钮。在初始快照之后,传感器电路继续跟踪,直到在6个采样=5.1ms上观察到5度的旋转,这指示高速阶段已经开始。可以利用DFT相位测量来完成5度的角度测量。传感器电路在高速阶段期间继续跟踪,其中两个方案可用于角度测量:(i)DFT相位测量,当磁体快速旋转时,DFT相位测量不太可靠,但可以通过在7个连续采样中观察到极少的旋转来可靠地检测高速阶段何时结束,以及(ii)适合在高速阶段期间对半个旋转计数的“粗”角度测量方案。一旦高速阶段结束,假设对于给定剂量事件不存在更快的旋转阶段,则传感器电路退出跟踪状态,并以50ms采样频率进入剂量模式。在剂量模式期间,磁体传感器(此处:7个)可以根据采样频率连续操作或全部同时操作。实际上,后一个采样模式将导致(7倍)更高的能量消耗,然而,取决于所使用的算法,可以预期更高的精度,这可以在具有低采样频率的正常剂量模式期间抵消此精度。
如果用户启动没有(零)设定剂量的装置,则不会检测到快速旋转,因为根本不发生旋转。传感器电路继续在跟踪状态下跟踪,等待快速旋转开始,直到达到超时条件(例如,10秒)。超时后,传感器电路假定发生了错误,例如,当装置在手提包中时按下按钮,并且剂量可以用“未知剂量大小”记录。
在某些罕见条件下,当设置非常小的剂量例如1IU时,排出机构的设计以及拨动剂量的方式(例如,如果使用者首先拨动大于1IU的剂量,然后向下拨动到1IU)使指示器的旋转可能无法触发高速阶段。在这种情况下,传感器电路保持在快速采样的跟踪阶段,直到致动开关被停用或超时。如果在指示实际使用的超时之前开关被停用,传感器电路会查看DFT相位测量,并决定这是1IU剂量还是零剂量,在这种情况下,不记录剂量。
为了解决“(太)快”释放按钮激活的问题,可以实施需要通过的验收标准,以便传感器电路不报告“未知剂量大小”。例如,第一快照(DFT)和基于来自跟踪阶段的第一采样的DFT角度之间的旋转必须较小,否则,将它视为释放按钮激活速度如此大以致于笔可能已开始给药并且在第一快照与跟踪开始之间旋转>180度的标志。
实际上,可以利用其它适应性采样方案。例如,对于预定的转速范围,采样频率可以随着转速而连续地变化。
在以上公开中,通过将四极示踪磁体与包括多个磁力计的传感器阵列组合使用,解决了外部干扰磁场以及来自笔装置扭矩弹簧的内部干扰磁场的问题。在下面通过不同的方法来解决该问题,所述方法可以用作上述四极设计的替代或补充。
使用磁屏蔽件来屏蔽磁系统免受外部干扰是众所周知的并且被使用过。通常,屏蔽件被用作隔离磁场并防止它们影响其他系统的屏障,或者用作隔离系统并屏蔽其不受外部(非屏蔽)磁场影响的屏障。可能会引入干扰场的系统的内部部件通常放置在系统的屏蔽体积之外。实际上,有可能在包括由可磁化材料制造的驱动弹簧的药物递送装置中包含屏蔽件,然而,由于这可能需要对笔装置进行重大的重新设计,因此这可能不是成本效益高的选择。
因此要解决的技术问题是提供磁屏蔽件,其防止/减小内部磁场干扰基于磁力计的捕获装置或组件中的磁传感器的测量。另外,这样的屏蔽件还可以用于防止/减小来自“正常”外部磁场的干扰。
建议的解决方案是引入高导磁合金的屏蔽件,不仅屏蔽传感器系统免受外部磁场的影响,而且将由扭矩弹簧引入的任何意外的内部磁场转移到屏蔽件并减少示踪磁体的场的干扰。通过降低来自扭矩弹簧的干扰场的强度,可以使用更少的传感器,从而降低信号处理要求以获得所需的精度和冗余度,由此降低成本和功耗。
高导磁合金是具有很高磁导率的镍铁软磁合金。它有几种成分,其中镍含量约80%,钼含量约15%,在某些成分中还含有少量铜和铬。高导磁合金具有很好的延展性和可加工性,并且可以容易地形成为磁屏蔽件所需的薄片。然而,高导磁合金在其加工成最终形状后需要进行热处理。用高导磁合金制成的磁屏蔽件通过为屏蔽区域周围的磁力线提供路径而不是阻挡它们来起作用。高导磁合金在某种程度上与相对磁导率较低的空气相比提供了“更容易”的路径并因此转移磁场。然而,高导磁合金具有低得多的饱和水平并且因此不适合屏蔽较强的磁场。
图21示出了与图8A中所示的组件基本对应的组件,尽管示出了药物递送装置扭矩弹簧655,附加剂量记录装置1000设置有由高导磁合金制成的圆柱形屏蔽件1020,其覆盖传感器的轴向长度和示踪磁体的体积,以及扭矩弹簧655的近侧部分。圆柱形高导磁合金屏蔽件基本吸收已被磁化的扭矩弹簧的磁力线,并将其朝向圆周屏蔽件引导,由此限制扭矩弹簧在轴向方向上和因此朝向传感器的干扰场的范围。同时,圆柱形屏蔽件有助于减小外部磁场EMF对布置在圆柱形体积内部的传感器电子器件的影响。
尽管圆柱形高导磁合金屏蔽件1020主要还将吸收来自示踪磁体660M的磁力线,但这将在较小程度上影响测量性能,原因是(i)扭矩弹簧655轴向布置得比示踪磁体更远离磁性传感器1066M,以及(ii)扭矩弹簧在径向上布置得比示踪磁体更靠近屏蔽件。通过该方式,传感器系统将能够测量来自示踪磁体的磁场,原因是只有一小部分场被屏蔽件吸收,而上述几何特性将允许来自扭矩弹簧的磁场由屏蔽件高度吸收,因此对传感器的影响较小。
图22示出了附加剂量记录装置1100的实施例,其中能够处理更强磁场而不饱和的钢外屏蔽件1121被施加以提供用于外部磁场的路径。用高导磁合金制成的内屏蔽件1122布置成为由扭矩弹簧引入的相对弱的内部磁场提供路径,而不会被强外部场饱和。
在示例性实施例的以上描述中,在本领域技术人员将清楚本发明的概念的程度上描述了为不同部件提供所述功能的不同结构和装置。不同部件的详细构造和说明被认为是由本领域技术人员按照本说明书中所陈述的路线进行的正常设计过程的目的。
- 具有传感器采样特征的药物递送组件
- 具有移动传感器系统的药物递送组件