模型递减的深度学习的人体穴位识别方法及理疗设备
文献发布时间:2023-06-19 13:48:08
技术领域
本公开涉及理疗设备领域,尤其涉及一种模型递减的深度学习的人体穴位识别方法及理疗设备。
背景技术
人体经络是脏腑的延伸,它本身虽不具有治病的效果,但它的通畅是非常有必要的。通畅的经络意味着气血可以正常运行,表示脏腑功能呈正常状态。疏通十二经络中易发生堵塞的穴位,可以保持十二脏腑的正常运作。
智能人体经络调理设备是依据中医经络疏通、调节原理,通过前沿人工智能技术、机器人技术、再结合精密机械控制手段,集成实现的可代替人工手法的智能化设备。
在使用智能人体经络调理设备进行调理时,需要摄像头进行人体图像拍摄来进行人体穴位定位,并根据定位的穴位进行机械臂的控制。在对人体穴位进行定位时,需要对左侧和右侧穴位点均进行定位。因为左侧和右侧使用不同的摄像头进行人体图像的拍摄,所以在定位穴位时,需要分别搭建对应的穴位识别模型分别进行识别,造成识别模型数量多,占用较多的内存空间。
发明内容
有鉴于此,本公开提出了一种模型递减的深度学习的人体穴位识别方法及理疗设备,达到用少量模型实现人体左右两侧穴位点识别的效果。
本发明公开了一种模型递减的深度学习的人体穴位识别方法,人体的左侧或者右侧作为第一侧,人体相对的另一个侧作为第二侧;所述方法包括以下步骤:
获取所述第二侧的第二人体图像;
将所述第二人体图像进行镜像转换,得到与所述第一侧相对应的镜像人体图像;
使用所述第一侧对应的第一人体穴位识别模型对所述镜像人体图像进行人体穴位识别,得到带有人体穴位的镜像第二穴位图像;
对所述镜像第二穴位图像进行镜像转换,得到与人体所述第二侧对应的第二穴位图像。
作为模型递减的深度学习的人体穴位识别方法的一种可实施方式,所述方法还包括以下步骤:
获取所述第一侧的第一人体图像;
使用所述第一人体穴位识别模型对所述第一人体图像进行识别,得到带有人体穴位的第一穴位图像。
作为模型递减的深度学习的人体穴位识别方法的一种可实施方式,该方法中没有与所述第二侧对应的人体穴位识别模型。
作为模型递减的深度学习的人体穴位识别方法的一种可实施方式,所述第一人体穴位识别模型包括第一主身体穴位识别模型、第一手部穴位识别模型和第一脚部穴位识别模型。
作为模型递减的深度学习的人体穴位识别方法的一种可实施方式,通过第一摄像机获取所述第一侧对应的人体图像,通过第二摄像机获取所述第二侧对应的人体图像;所述第一摄像机和所述第二摄像机拍摄所述人体的角度相同。
作为模型递减的深度学习的人体穴位识别方法的一种可实施方式,所述方法还包括以下步骤:
对所述第一穴位图像和所述第二穴位图像进行融合处理,得到人体全穴位图像。
本发明还提供一种人体经络理疗设备,包括中部理疗区域,摄像头,按摩机械臂及控制终端;
所述中部理疗区域用于承载待理疗人员;所述摄像头两个以上,至少包括左摄像头和右摄像头,所述左摄像头设置在所述中部理疗区域的左侧,能够从左侧拍摄待理疗人员的图像,所述右摄像头设置在所述中部理疗区域的右侧,能够拍摄所述待理疗人员右侧的图像;所述控制终端按照前述的方法通过所述摄像头拍摄的图像识别所述待理疗人员的人体穴位,并根据识别的人体穴位控制所述按摩机械臂对所述待理疗人员进行按摩理疗。
作为人体经络理疗设备的一种可实施方式,所述左摄像头安装在所述中部理疗区域左侧的斜上方,所述右摄像头安装在所述中部理疗区域右侧的斜上方,且所述左摄像头和所述右摄像头与待理疗人员的相对位置角度相同。
作为人体经络理疗设备的一种可实施方式,所述摄像头还包括顶部摄像头,设置在所述中部理疗区域的前端或者后端,用于从人体长度方向拍摄所述待理疗人员的图像。
作为人体经络理疗设备的一种可实施方式,所述控制终端中存储有与所述第一侧对应的人体穴位识别模型,没有与所述第二侧对应的人体穴位识别模型。
本发明的模型递减的深度学习的人体穴位识别方法通过四个步骤,利用人体及人体穴位左右对称的原理,通过两次镜像操作,将从人体右侧拍摄的人体图像使用与人体左侧对应的穴位识别模型进行识别,得到与人体右侧相对应的人体穴位点。因此,不用再针对右侧人体结构设置单独的人体穴位识别模型,使用一侧的人体穴位识别模型就可以对人体双侧穴位点进行识别,不降低穴位点识别精度的情况下减少了人体穴位识别模型的数量,降低这个方法实施过程中设备内存的占用量,提高设备运行效率。
根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
附图说明
包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了本公开的示例性实施例、特征和方面,并且用于解释本公开的原理。
图1示出本发明的一实施例模型递减的深度学习的人体穴位识别方法的流程图;
图2示出本发明另一实施例的模型递减的深度学习的人体穴位识别方法的流程图;
图3示出本发明一实施例的人体经络理疗设备结构图。
具体实施方式
以下将参考附图详细说明本公开的各种示例性实施例、特征和方面。附图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
另外,为了更好的说明本公开,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述,以便于凸显本公开的主旨。
本发明的模型递减的深度学习的人体穴位识别方法主要是针对人体左右两侧的穴位点识别,对于左右两侧,在本发明方法的介绍过程中,为了便于描述,将人体的左侧或者右侧作为第一侧,人体相对的另一个侧作为第二侧。即,人体左侧作为第一侧时,则人体的右侧作为第二侧;当将人体的右侧作为第一侧时,则人体的左侧为第二侧。但是需要注意的时,在同一个方法中一旦对第一侧进行选定后,则不再更换,全部处理过程中都以已经选定的左侧或者右侧作为第一侧。例如,在一个实施例中,选择左侧作为第一侧,则全部的实施方法中,全流程中都用左侧作为第一侧,用右侧作为第二侧,中途不再改变。如果选定右侧作为第一侧也是可以的,但是全部方法实施过程中也不会进行第一侧的更换。当然,在具体实施过程中,可以根据习惯任意选择左侧或者右侧作为第一侧,选择左侧作为第一侧和选择右侧作为第一侧是效果是完全相同的。
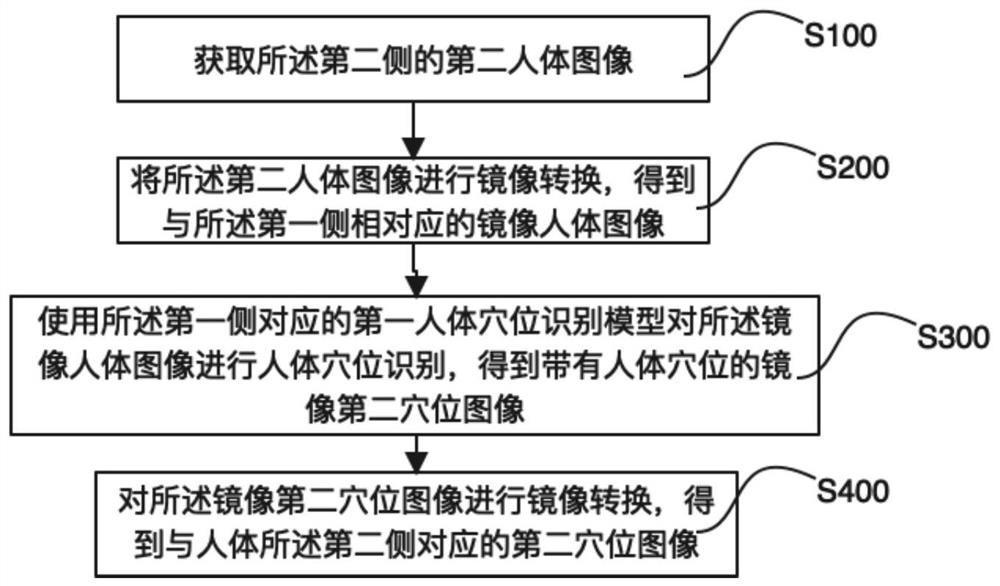
在其中一个实施例中,模型递减的深度学习的人体穴位识别方法,在穴位识别时,如图1所示,包括以下步骤:
S100,获取第二侧的第二人体图像;
S200,将第二人体图像进行镜像转换,得到与第一侧相对应的镜像人体图像;
S300,使用第一侧对应的第一人体穴位识别模型对镜像人体图像进行人体穴位识别,得到带有人体穴位的镜像第二穴位图像;
S400,对镜像第二穴位图像进行镜像转换,得到与人体第二侧对应的第二穴位图像。
通过步骤S100~S400完成通过第一侧的第一人体穴位识别模型对第二侧人体穴位点的识别。
其中步骤S100,获取所述第二侧的第二人体图像是指相对所述第一侧,获取另一侧的人体图像。如当选区人体左侧作为第一侧时,则本步骤中所获的第二人体图像是从人体右侧所获取的人体图像。需要说明的,所述第二图像包含需要进行人体穴位定位的右侧部分的人体结构的图像。具体所述右侧部分的人体结构图像是指将人体从上到下轴对称进行分割的人体右手一侧的人体结构对应的图像,而相对的,人体左右一侧的人体结构对应的图像为第一人体图像。当然,一般情况下,所述第二人体图像除了包含所述人体右侧部分的人体结构图像外,一般也会包含部分左侧部分的人体结构图像,甚至在部分情况下,所述第二人体图像中可能同时包含左侧部分的人体结构图像和右侧部分的人体结构图像。
通过步骤S100获取到第二侧的第二人体图像后,执行步骤S200,将第二人体图像进行镜像转换,得到与第一侧相对应的镜像人体图像。该步骤中是通过镜像翻转,将从第二侧角度的第二人体图像转换为第一角度的图片。在左侧为第一侧的情况下,将从右侧拍摄的人体图像镜像后,其自然成为左侧角度的人体图像,从而可以在左侧角度下对图像进行处理。
通过步骤S200进行图像的镜像转换后,则可以执行步骤S300,使用第一侧对应的第一人体穴位识别模型对镜像人体图像进行人体穴位识别,得到带有人体穴位的镜像第二穴位图像。其中所述第一人体穴位模型是采用深度学习的人体穴位识别模型,而且是该方法中所设计的专门识别一侧人体经络的穴位识别模型。即在左侧为第一侧的情况下,在进行该方法时,会预先对该模型进行训练,使其达到识别左侧人体穴位的程度,并存储到计算机中。而且由于人体穴位点在人体上左侧和右侧是完全对称的,所以本方法中所设计的第一人体穴位识别模型是能够单独识别人体一侧的模型。在左侧为第一侧时,所述第一人体穴位识别模型能够根据所获得的人体图像进行左侧穴位点的识别。另外需要说明的是,所述第一人体穴位识别模型可以对包含人体从头到脚整个一侧的图像进行穴位识别,也可以对包含部分人体结构的局部进行人体穴位的识别。同样,本方法中第一步所获取的第二人体图像可以是包含人体从头到脚整个侧面的人体图像,也可以是只包含部分人体结构的人体图像。
本步骤中,使用第一人体穴位识别模型进行穴位识别后得到的镜像第二穴位图像中包含了与人体第一侧所对应的穴位点。
得到第一侧对应的穴位点之后,继续执行步骤S400,对镜像第二穴位图像进行镜像转换,得到与人体第二侧对应的第二穴位图像。因为人体的穴位点是左右对称的,将带有第一侧(左侧)的穴位点的镜像第二穴位图像进行镜像,则翻转之后步骤S300中识别出的人体左侧对应的穴位点则镜像为人体右侧的穴位点。从而实现了利用人体左侧的穴位识别模型同时对人体右侧穴位点进行识别。
本发明通过上述的步骤S100~S400,利用人体及人体穴位左右对称的原理,通过两次镜像操作,将从人体右侧拍摄的人体图像使用与人体左侧对应的穴位识别模型进行识别,得到与人体右侧相对应的人体穴位点。因此,不用再针对右侧人体结构设置单独的人体穴位识别模型,使用一侧的人体穴位识别模型就可以对人体双侧穴位点进行识别,不降低穴位点识别精度的情况下减少了人体穴位识别模型的数量,降低这个方法实施过程中设备内存的占用量,提高设备运行效率。
如图2所示,另一实施例的模型递减的深度学习的人体穴位识别方法中描述了人体另一侧穴位点的识别。具体的第一侧人体穴位点识别的步骤如下:
S001,获取第一侧的第一人体图像;
S002,使用所述第一人体穴位识别模型对第一人体图像进行识别,得到带有人体穴位的第一穴位图像。
其中,步骤S001中第一人体图像与步骤S100中第二人体图像是类似的只是方向不同。当人体左侧作为第一侧时,步骤S001中的第一人体图像为从人体左侧拍摄的人体图像,该图像中可能包含人体整个左侧部分的图像,也可能只包含人体左侧部分人体机构,也可能同时包含人体右侧部分人体结构的图像。
本实施例中步骤S002中和步骤S300类似,同样是根据获取到的图像对人体穴位点进行识别,而且使用的是同一人体穴位识别模型进行的穴位识别。不同的是,步骤S002中识别出的穴位为最终的人体穴位,不用再进行穴位的镜像转换。当所述第一侧为左侧时,则此时识别出的人体穴位为最终的人体左侧经络的穴位。该实施例中,左右两侧采用的同一人体穴位识别模型。在该实施例中没有设置与第二侧对应的人体穴位识别模型,整个穴位识别只通过设置在人体第一侧(左侧)的人体穴位识别模型即可实现。
进一步的,为了提高人体穴位识别的精准度,第一人体穴位识别模型包括第一主身体穴位识别模型、第一手部穴位识别模型和第一脚部穴位识别模型。其中,所述第一主申请穴位识别模型用于对人体主干包括胳膊和腿部的穴位进行识别,而穴位比较密集的手部和脚部的穴位识别,分别由单独的第一手部穴位识别模型和第一脚部穴位识别模型来实现。当然所述第一主申请穴位识别模型,所述第一手部穴位识别模型和所述第一脚部穴位识别模型能够识别人体相同侧的人体穴位,即第一侧。当将人体左侧作为第一侧时,则所述第一主申请穴位识别模型,所述第一手部穴位识别模型和所述第一脚部穴位识别模型能够分别直接识别人体主干左侧,左手和左脚的人体穴位。而且能够通过人体右侧图像采用图像镜像的方式识别人体右侧部分的穴位。
需要说明的是,上述各实施例中的人体图像可以通过安装摄像头拍摄。如通过第一摄像机获取第一侧对应的人体图像,通过第二摄像机获取第二侧对应的人体图像。为了保证识别的精准度,可以在设计摄像机的时候,设置第一摄像机和第二摄像机拍摄人体的角度相同。
另外如图2所示,该方法中还可以包括对人体图像整体融合的步骤,也即步骤S500,对第一穴位图像和第二穴位图像进行融合处理,得到人体全穴位图像。该步骤中可以将第一穴位图像和第二穴位图像进行拼接得到同时带有左侧和右侧人体穴位的人体全穴位图像。对于图像的拼接,因为人体穴位距离人体中轴的距离比例是确定的,而且人体左右两侧穴位是对称的,因此可以直接对所述第一穴位图像沿人体中轴进行裁切,对第二穴位图像也沿人体中轴进行裁切,再将两个裁切后的图像进行拼接,得到包含人体双侧穴位点的人体全穴位图像。拼接后,可以通过一张人体全穴位图进行人体经理理疗运行轨迹进行分析,轨迹分析会更高效,也会更精准。
本发明还提供一种人体经络理疗设备100,如图3所示,包括中部理疗区域,按摩机械臂120,摄像头130及控制终端(未示出)。其中,中部理疗区域用于承载待理疗人员,实际工作中可以采用图3中所示的理疗床110来让待理疗的人员平躺上方进行理疗,也可以采用其他结构来承载待理疗人员,或者所述中部理疗区域直接作为空白区域也是可以的,待理疗人员可以平躺在设备安装的平面上进行理疗。该设备中摄像头两个以上,至少包括左摄像头和右摄像头,左摄像头设置在中部理疗区域的左侧,能够从左侧拍摄待理疗人员的图像,右摄像头设置在中部理疗区域的右侧,能够拍摄待理疗人员右侧的图像;控制终端按照前述任一实施例的方法通过摄像头拍摄的图像识别待理疗人员的人体穴位,并根据识别的人体穴位控制按摩机械臂对待理疗人员进行按摩理疗。具体的,以左侧为第一侧时,预先将第一人体穴位识别模型加载到所述控制终端的内存中,控制终端利用所述第一人体穴位识别模型对左侧摄像机拍摄的图像直接进行人体左侧穴位点的识别。通过前述方法通过镜像对右侧摄像头拍的图像进行人体右侧穴位点的识别。
图3所示的设备中,疗床用于理疗人员躺置,按摩机械臂用于对理疗人员进行按摩理疗及多个摄像头,用于获取理疗人员的图像用于系统制定理疗轨迹疗床用于理疗人员躺置,按摩机械臂用于对理疗人员进行按摩理疗及多个摄像头,用于获取理疗人员的图像,控制终端利用获取的图像进行人体穴位点的识别,并根据识别出穴位点制定理疗轨迹,也即按摩机械臂120的运行轨迹。其中,理疗床110能够沿自身的体长方向移动,两侧均设置按摩机械臂120。按摩机械臂120的一端设有震动理疗头121,震动理疗头121能够朝向理疗床110的顶面移动,并能够沿理疗床110的体长方向和体宽方向移动,对平躺在理疗床110上的人体进行振动理疗。
具体使用过程中,人体可以仰卧或俯卧在理疗床110上,头部和脚部分别朝向理疗床110的两端。需要指出的是,人体十二经脉中每一种经脉的整体走势均沿着人体的体长方向进行分布。理疗床110能够沿自身的体长方向移动,以带动人体整体沿理疗床110的体长方向移动,相对仅有按摩机械臂120沿经脉走势移动的方式,有利于按摩机械臂120对穴位进行定位,有效地改善了对人体经络的调理效果。在理疗床110的每一侧都设有按摩机械臂120,在按摩机械臂120的一端设有震动理疗头121,震动理疗头121能够朝向理疗床110的顶面移动,并能够沿理疗床110的体长方向和体宽方向移动,使得震动理疗头121能够抵至仰卧或俯卧在理疗床110的顶面的人体上,并产生震动,沿着每一种经脉的走势作用在一个又一个穴位上。此处,需要说明的是,人体经络调理设备100工作时,震动部先定位到十二经脉中其中一种经脉上,然后,沿着该经脉的走势作用在该经脉的每一个穴位上。震动理疗头121与理疗床110相互协同工作,大大改善了对人体经络的调理效果。
该实施例中,理疗床110的相对两侧的上方均设有一个按摩机械臂120。十二经脉中,每两个为一组,互为阴阳表里。相对单侧设置按摩机械臂120的形式,两侧的按摩机械臂120能够相互协同工作,作用在两个经脉上,进一步地改善了对人体经络的调理效果。
另外如图3所示,该系统中设置有三个摄像头,一个摄像头130设于理疗床110的一侧的斜上方,即一个摄像头130设于理疗床110的左侧的上方。当人体仰卧在理疗床110上时,设于理疗床110的左侧的上方的摄像头130位于人体的左侧面的斜上方,通过该摄像头130能够获取人体左侧及右腿内侧的经脉;当人体俯卧在理疗床110上时,设于理疗床110的左侧的上方的摄像头130位于人体的右侧面的斜上方,通过该摄像头130能够获取人体右侧及左腿内侧的经脉。
除上述设置在理疗床110左侧的摄像头外,该系统中中还有一个摄像头130设于理疗床110的另一侧的斜上方,即一个摄像头130设于理疗床110的右侧的上方。当人体仰卧在理疗床110上时,设于理疗床110的右侧的上方的摄像头130位于人体的右侧面的斜上方,通过该摄像头130能够获取人体右侧及左腿内侧的经脉;当人体俯卧在理疗床110上时,设于理疗床110的右侧的上方的摄像头130位于人体的左侧面的斜上方,通过该摄像头130能够获取人体左侧及右腿内侧的经脉。更佳的,左摄像头和右摄像头与待理疗人员的相对位置角度相同,从而左右摄像头获取的图像角度相同,便于使用同一穴位识别模型进行左右两侧对称的人体穴位的识别。
如图3所示,除了上述设置在理疗床110两侧的摄像头之外,该系统中还有一个摄像头130设于理疗床110床头一端的斜上方作为顶部摄像头,设置在中部理疗区域的前端或者后端,用于从人体长度方向拍摄待理疗人员的图像。设于理疗床110的床头端的上方的摄像头130位于人体头部的斜上方。当人体仰卧在理疗床110上时,通过该摄像头130能够获取头顶、面部和肩部的经脉;当人体俯卧在理疗床110上时,通过该摄像头130能够获取头顶、肩背的经脉。在其他实施例中,设置在床头斜上方的摄像头也可以设置在床尾一端的斜上方,在经络检测方面,也可以达到与设置在床头摄像头相类似的效果。
另外,在其他实施例中,还可以在理疗床110的正上方设置一个摄像头130。当人体仰卧在理疗床110上时,通过该摄像头130能够获取人体的前侧面的经脉;当人体俯卧在理疗床110上时,通过该摄像头130能够获取人体的后侧面的经脉。
在系统使用过程中,在人体进行仰卧或俯卧时,多个摄像头均能够对人体经脉进行全方位的识别,有利于主控计算机通过摄像头的信号控制按摩机械臂120定位寻找每一种经脉,有效地改善了调理效果。而为多个摄像头130相互配合工作,采用多角度方式对人体经脉进行分区域识别,有效地提高了识别精度,减少图像畸变的影响,降低遮挡风险,改善按摩机械臂120的定位准度,从而改善了调理效果。
需要说明的是,本发明的人体经络理疗设备,控制终端中存储有与第一侧对应的人体穴位识别模型,没有与第二侧对应的人体穴位识别模型。人体左右两侧的人体穴位的识别均通过第一侧对应的第一人体穴位识别模型实现。所述控制终端可以为计算机等具有数据处理和状体显示功能的智能终端。
以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
- 模型递减的深度学习的人体穴位识别方法及理疗设备
- 基于光流图深度学习模型在视频中人体交互动作识别方法