一种无人机农药喷洒装置
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及无人机设备技术领域,具体是一种无人机农药喷洒装置。
背景技术
无人机现在已经被用各行各业,无人机具有作业高度低,飘移少,可空中悬停,无需专用起降机场,旋翼产生的向下气流有助于增加雾流对作物的穿透性,防治效果高,远距离遥控操作。
现有的农药喷洒装置基本采用人工方式进行,但是无法进行高空喷洒,使得农药喷洒效率降低,农药喷洒往往需要通过搅拌完成配比,但现有技术的无人机农药喷洒装置的配药箱内部搅拌效果较差,耗费了大量人力物力。
发明内容
本发明的目的在于提供一种无人机农药喷洒装置,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种无人机农药喷洒装置,包括:无人机、搅拌腔和下料腔,所述无人机与储料箱通过螺栓连接,所述储料箱数量为两个,且两个储料箱分别通过一个导料槽与搅拌腔连通,所述搅拌腔内转动连接有旋转轴,所述旋转轴对应两个导料槽下方的位置上分别设有一个第一搅拌组件,两个所述第一搅拌组件的内侧设有一个第二搅拌组件安装于旋转轴上,所述第一搅拌组件和第二搅拌组件均由多个搅拌叶片组成,所述旋转轴通过下料组件与下料腔连接,所述下料腔底部通过第一连接管与第二连接管连接,所述第二连接管上设有多个交错布设的分流管,且每个分流管与第二连接管的连接处均设有限流阀,每个所述分流管上均连接有一个喷头。
作为本发明进一步的方案:所述旋转轴两端分别设有一个第一清洁杆,两个所述第一清洁杆平行布设,且两个第一清洁杆的两端分别通过一个第二清洁杆连接,所述第一清洁杆和第二清洁杆均贴合搅拌腔内壁布设。
作为本发明再进一步的方案:所述第一连接管上连接有加压泵,所述第一连接管上设有风速仪。
作为本发明再进一步的方案:所述下料组件包括出料管和进料管,所述出料管与搅拌腔底部连接,所述进料管与下料腔顶部连接,所述出料管底部设有出料孔,所述进料管顶部设有进料孔,且出料孔和进料孔同轴安装,所述出料管与进料管之间通过旋转轮连接,所述旋转轮上设有连通孔,所述旋转轮与第一齿轮同轴安装,所述第一齿轮与连接于输出电机输出端的第三齿轮啮合。
作为本发明再进一步的方案:所述下料腔内铰接有连杆,所述连杆与滑动连接于限位管的浮球固定连接,所述限位管通过滑槽与连杆滑动连接,所述限位管顶部设有第一行程开关,所述限位管底部设有第三行程开关,所述第一行程开关与第三行程开关之间的间隙处设有第二行程开关安装于限位管上。
作为本发明再进一步的方案:每个所述分流管的管体均由伸缩杆制成。
作为本发明再进一步的方案:所述第一齿轮的中心轴处转动连接有第二齿轮,所述第二齿轮与连接于驱动电机的输出端的第四齿轮啮合,所述第二齿轮的中心轴与设于第一连接管内部的旋转杆连接,所述第二连接管内部设有连接杆,所述旋转杆与连接杆转动连接,所述连接杆内设有多个第五齿轮,且多个第五齿轮之间相互啮合,位于中间位置的所述第五齿轮的中心轴与旋转杆固定连接,每个所述第五齿轮上均设有限位环,所述第五齿轮上固定的卷簧穿过限位环上的限位槽与一个喷头连接。
与现有技术相比,本发明的有益效果是:
1.农药冲击第一搅拌组件带动第二搅拌组件旋转对农药进行搅拌,避免人工搅拌农药费时费力,降低农药喷洒效率的问题。
2.浮球随液面变化触碰不同的行程开关,实现对农药含量的监测以及自动上料,提高农药喷洒效率。
3.旋转杆旋转带动多个卷簧收卷,针对不同使用场景调整喷洒范围,增加装置实用性。
附图说明
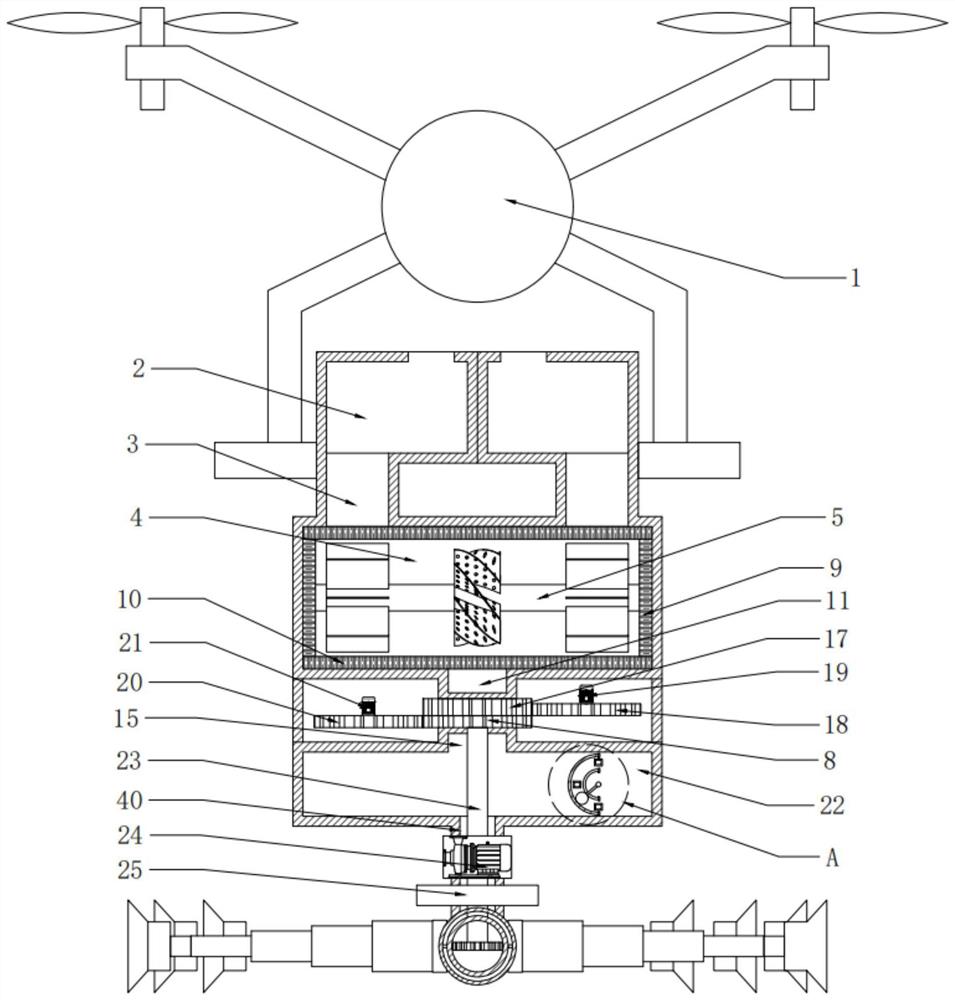
图1为无人机农药喷洒装置的结构示意图。
图2为无人机农药喷洒装置中旋转轴的结构示意图。
图3为无人机农药喷洒装置中旋转轮的结构示意图。
图4为无人机农药喷洒装置的图1中A的结构示意图。
图5为无人机农药喷洒装置中分流管伸长状态的结构示意图。
图6为无人机农药喷洒装置中第五齿轮的结构示意图。
图7为无人机农药喷洒装置中分流管缩短状态的结构示意图。
附图中:1-无人机、2-储料箱、3-导料槽、4-搅拌腔、5-旋转轴、6-第一搅拌组件、7-第二搅拌组件、8-第二齿轮、9-第一清洁杆、10-第二清洁杆、11-出料管、12-出料孔、13-旋转轮、14-连通孔、15-进料管、16-进料孔、17-第一齿轮、18-第三齿轮、19-输出电机、20-第四齿轮、21-驱动电机、22-下料腔、23-旋转杆、24-加压泵、25-风速仪、26-连接杆、27-分流管、28-喷头、29-限流阀、30-第五齿轮、31-限位环、32-卷簧、33-浮球、34-连杆、35-滑槽、36-限位管、37-第一行程开关、38-第二行程开关、39-第三行程开关、40-第一连接管、41-第二连接管。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实施例公开的一些方面相一致的装置和方法的例子。
如图1~5所示,本发明实施例中,一种无人机农药喷洒装置,包括:无人机1、搅拌腔4和下料腔22,所述无人机1与储料箱2通过螺栓连接,所述储料箱2数量为两个,且两个储料箱2分别通过一个导料槽3与搅拌腔4连通,所述搅拌腔4内转动连接有旋转轴5,所述旋转轴5对应两个导料槽3下方的位置上分别设有一个第一搅拌组件6,两个所述第一搅拌组件6的内侧设有一个第二搅拌组件7安装于旋转轴5上,所述第一搅拌组件6和第二搅拌组件7均由多个搅拌叶片组成,所述旋转轴5通过下料组件与下料腔22连接,所述下料腔22底部通过第一连接管40与第二连接管41连接,所述第二连接管41上设有多个交错布设的分流管27,且每个分流管27与第二连接管41的连接处均设有限流阀29,每个所述分流管27上均连接有一个喷头28。
如图1所示,作为本发明一个优选的实施例,所述旋转轴5两端分别设有一个第一清洁杆9,两个所述第一清洁杆9平行布设,且两个第一清洁杆9的两端分别通过一个第二清洁杆10连接,所述第一清洁杆9和第二清洁杆10均贴合搅拌腔4内壁布设。
如图1所示,作为本发明另一个优选的实施例,所述第一连接管40上连接有加压泵24,所述第一连接管40上设有风速仪25。
在实际应用中,将农药注入储料箱2内,若是两种农药,则分别注入两个储料箱2内,无人机1飞行过程中,农药通过导料槽3流入搅拌腔4时,下落的农药撞击第一搅拌组件6带动旋转轴5旋转,使得第二搅拌组件7旋转对搅拌腔4内的农药进行搅拌,避免人工搅拌农药费时费力,降低农药喷洒效率的问题,搅拌后的农药通过下料组件进入下料腔22,随后通过第一连接管40流入各个分流管27内,最终通过喷头28喷洒出,风速仪25监测风速后,外部控制器调控加压泵24对农药进行加压,有效减缓喷头28喷洒出的农药受风力偏移喷洒路径的问题,农药喷洒完成后,向储料箱2内注入清水,清水落至搅拌腔4中时冲击第一搅拌组件6带动旋转轴5旋转,使得第一清洁杆9和第二清洁杆10对搅拌腔4内壁进行清理,避免长时间使用后嚄内壁上附着过多农药残渣,对后续农药造成污染的问题。
如图1~3所示,作为本发明另一个优选的实施例,所述下料组件包括出料管11和进料管15,所述出料管11与搅拌腔4底部连接,所述进料管15与下料腔22顶部连接,所述出料管11底部设有出料孔12,所述进料管15顶部设有进料孔16,且出料孔12和进料孔16同轴安装,所述出料管11与进料管15之间通过旋转轮13连接,所述旋转轮13上设有连通孔14,所述旋转轮13与第一齿轮17同轴安装,所述第一齿轮17与连接于输出电机19输出端的第三齿轮18啮合。
如图1~4所示,作为本发明另一个优选的实施例,所述下料腔22内铰接有连杆34,所述连杆34与滑动连接于限位管36的浮球33固定连接,所述限位管36通过滑槽35与连杆34滑动连接,所述限位管36顶部设有第一行程开关37,所述限位管36底部设有第三行程开关39,所述第一行程开关37与第三行程开关39之间的间隙处设有第二行程开关38安装于限位管36上。
在实际应用中,输出电机19驱动第三齿轮18旋转带动第一齿轮17旋转,当旋转轮13上的连通孔14与出料孔12对齐时,出料管11与进料管15之间为连通状态,农药经过二者进入下料腔22内,当连通孔14转离出料孔12时,出料管11与进料管15之间被闭合,农药停留在搅拌腔4内,由此实现农药的间接性上料,避免一次性上料过多造成农药的浪费,下料腔22中的农药含量过多时,浮球33随液面上升并触碰第一行程开关37,第一行程开关37向外部控制器发送信号后,外部控制器调控输出电机19断电,且旋转轮13维持堵塞在出料管11与进料管15之间的状态,农药被喷洒出后下料腔22中的农药液面下降,浮球33滑动至第二行程开关38处,第二行程开关38向向外部控制器发送信号后,外部控制器调控输出电机19上电工作驱动第三齿轮18旋转,通过第一齿轮17带动旋转轮13旋转,继续农药的间歇性上料,若下料腔22内的农药含量过低时,浮球33处于最低位置并触碰第三行程开关39,第三行程开关39向外部控制器发送信号后,外部控制器通过警报组件发出警报,提醒工作人员停止无人机1的飞行并向储料箱2内注入农药,由此实现对农药含量的监测以及自动上料,提高农药喷洒效率。
如图1~5所示,作为本发明另一个优选的实施例,每个所述分流管27的管体均由伸缩杆制成。
如图1~7所示,作为本发明另一个优选的实施例,所述第一齿轮17的中心轴处转动连接有第二齿轮8,所述第二齿轮8与连接于驱动电机21的输出端的第四齿轮20啮合,所述第二齿轮8的中心轴与设于第一连接管40内部的旋转杆23连接,所述第二连接管41内部设有连接杆26,所述旋转杆23与连接杆26转动连接,所述连接杆26内设有多个第五齿轮30,且多个第五齿轮30之间相互啮合,位于中间位置的所述第五齿轮30的中心轴与旋转杆23固定连接,每个所述第五齿轮30上均设有限位环31,所述第五齿轮30上固定的卷簧32穿过限位环31上的限位槽与一个喷头28连接。
在实际应用中,初始状态下,每个分流管27为最长状态,多个喷头28布设为圆形范围,增加农药喷洒范围,驱动电机21上电工作驱动第四齿轮20旋转,并通过第二齿轮8带动旋转杆23旋转,使得位于中间的第五齿轮30旋转后,通过啮合传动带动多个第五齿轮30旋转,进而使得多个卷簧32收卷,每个分流管27缩短至最短状态,从而使得多个喷头28呈线性排列,可针对不同使用场景调整喷洒范围,增加装置实用性。
本发明的工作原理是:
农药通过导料槽3流入搅拌腔4时,下落的农药撞击第一搅拌组件6带动旋转轴5旋转,使得第二搅拌组件7旋转对搅拌腔4内的农药进行搅拌,避免人工搅拌农药费时费力,降低农药喷洒效率的问题,搅拌后的农药通过下料组件进入下料腔22,随后通过第一连接管40流入各个分流管27内,最终通过喷头28喷洒出。下料腔22中的农药含量过多时,浮球33随液面上升并触碰第一行程开关37,第一行程开关37向外部控制器发送信号后,外部控制器调控输出电机19断电,且旋转轮13维持堵塞在出料管11与进料管15之间的状态,农药被喷洒出后下料腔22中的农药液面下降,浮球33滑动至第二行程开关38处,第二行程开关38向向外部控制器发送信号后,外部控制器调控输出电机19上电工作驱动第三齿轮18旋转,通过第一齿轮17带动旋转轮13旋转,继续农药的间歇性上料,若下料腔22内的农药含量过低时,浮球33处于最低位置并触碰第三行程开关39,第三行程开关39向外部控制器发送信号后,外部控制器通过警报组件发出警报,提醒工作人员停止无人机1的飞行并向储料箱2内注入农药,由此实现对农药含量的监测以及自动上料。第四齿轮20旋转通过第二齿轮8带动旋转杆23旋转,使得位于中间的第五齿轮30旋转后,通过啮合传动带动多个第五齿轮30旋转,进而使得多个卷簧32收卷,从而使得多个喷头28呈线性排列,可针对不同使用场景调整喷洒范围。
有必要进行说明的是,本申请技术方案的用电部件,如输出电机19、驱动电机21、加压泵24、风速仪25、第一行程开关37、第二行程开关38和第三行程开关39等均与外部控制器连接,所述的外部控制器为现有技术,本申请技术方案未对其进行改进,因而不需要公开外部控制器的具体型号、电路结构等,不影响本申请技术方案的完整性。
本领域技术人员在考虑说明书及实施例处的公开后,将容易想到本公开的其它实施方案。本申请旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由权利要求指出。
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
- 一种无人机农药喷洒控制方法及无人机
- 一种基于无人机的农药喷洒装置