红外海藻粒子图像测速装置及其测量方法
文献发布时间:2023-06-19 11:05:16
技术领域
本发明属于流体力学及鱼类行为学领域,特别涉及一种红外海藻粒子图像测速装置及其测量方法。
背景技术
粒子图像测速技术是七十年代末发展起来的一种瞬态、全流场、无接触的测速技术。其通过多次拍摄并记录实验区中示踪粒子的移动,分析示踪粒子的位置以得出实验区拍摄视野内的全局瞬时流速。目前这项技术被广泛应用于鱼类动力学研究,通过其测量的流场信息经过繁杂的数据分析计算可获得鱼类周身水动力学数据,例如:压力数据、身体表面力、力矩等。
现有的粒子图像测速技术多用于静水状态下,且采用明亮、穿透性较强的绿色激光照亮,目前对激光照射下鱼类游动行为的改变研究较少,只在初步实验中观察到鱼类避开激光片游动,为了克服明亮的激光对鱼类的游泳行为产生的影响,提出替代技术。另外激光装置和摄像机装置的架设也比较固定,不够灵活,调整视野、角度、高度的过程中费时耗力。此外,PIV数据的后处理方法不够便捷,耗时较长。
另外,目前在鱼类行为学实验中大量应用的是不变坡水槽,而实际水流往往是在有一定纵向比降的河床中运动,因此,变坡水槽的应用对于鱼类行为学研究有着重要的意义。现存的变坡升降器中存在着稳定性弱、可控性小、便捷度低等问题,易造成测量数据与实际情况误差太大。
发明内容
鉴于背景技术所存在的技术问题,本发明所提供的红外海藻粒子图像测速装置及其测量方法,解决了目前粒子图像测速装置灵活度较低、粒子图像测速装置在变坡水槽中的应用精确度较低、明亮绿色激光的照射会改变鱼类行为和激光片PIV成像产生阴影的问题,可测量任意平面上粒子的流动状态下产生的涡量、压力、表面力和力矩,是一种新的测量水动力学数据的方法。
为了解决上述技术问题,本发明采取了如下技术方案来实现:
一种红外海藻粒子图像测速装置,包括设置在水槽上的红外激光器,水槽旁设有摄像机支架,摄像机支架上设有至少两台摄像机,摄像机与电脑电性连接;所述的水槽为透明水槽。
优选的方案中,所述的水槽一端设有进水口,水槽另一端连通水箱,水箱内设有水泵,水泵通过管道与进水口连通;水槽内设有挡水板,挡水板靠近进水口设置,挡水板下游端设有两块整流栅,两块整流栅之间的区域为试验测量区域;红外激光器位于试验测量区域上方。
优选的方案中,所述的摄像机包括垂直拍摄用摄像头和水平拍摄用摄像头,垂直拍摄用摄像头和水平拍摄用摄像头分别通过两个伸缩杆固定。
优选的方案中,所述的水槽底部设有变坡升降器,变坡升降器用于调节水槽坡度。
优选的方案中,所述的包括设置在水槽底部的滑轨,滑轨上设有多个滑块,滑块与螺纹升降杆铰接设置,螺纹升降杆与蜗轮螺纹配合,蜗轮通过蜗杆驱动旋转;水槽一端与水箱铰接设置。
优选的方案中,所述的螺纹升降杆包括第一螺纹升降杆、第二螺纹升降杆和第三螺纹升降杆,第一螺纹升降杆、第二螺纹升降杆和第三螺纹升降杆的螺纹距依次减小。
优选的方案中,所述的红外激光器的数量至少包括四个,多个红外激光器设置在试验测量区域上方两侧。
优选的方案中,所述的红外海藻粒子图像测速装置的测量方法,包括如下步骤:
S1:在水槽底部贴黑色遮光纸的胶纸,调节多个红外激光器的位置并固定,使红外激光器充分照射在试验测量区域;
S2:向水槽内的水体内撒入中性浮力海藻细胞作为示踪粒子;
S3:摄像机采用光学景深记录任意平面内的粒子移动,摄像机将信号传输给电脑生成拍摄视频;
S4:将拍摄的视频导入Virtual Dub转成图片,将图片导入MATLAB的子数据库PIVlab互相关分析计算得出流场数据,将流场数据导入MATLAB自定义程序Queen2.0计算得出压力场数据,两张流场数据可分析得出一张压力场图,再将对应的鱼体多等分导入界面,通过描点拾取鱼体表面的压力数据;将压力场数据和图片导入MATLAB自定义程序Fish getforces and torques估算得出身体表面力和力矩;
优选的方案中,所述的步骤S4的方法为:
将拍摄的视频导入Virtual Dub转成图片,在MATLAB中运行PIVlab脚本,将筛选后的图片序列导入PIVlab中,通过鱼体掩蔽屏蔽鱼体轮廓范围内的速度矢量计算,对相邻图像间询问区域尺寸逐步减小为128×128、64×64、32×32像素,重叠50%,采用FTT算法进行相关交叉性分析,以得出询问区域中最可能的粒子位移和已知的时间间隔相除,再经过后处理得出流场图,即互相关分析;互相关是一种统计模式匹配算法,其试图从位于询问区域B的询问区域A中找到粒子图像;该算法通过离散的互相关函数来实现:
C(m,n)=∑
其中A和B是来自图像A和图像B的相应询问区域;得到的相关矩阵C中强度峰值的位置给出了粒子从A到B的最可能位移;
将速度矢量和涡量数据导入Queen2.0中,对于不可压缩流动,利用Navier-Stokes方程通过求解由瞬时速度和材料加速度间接计算压力p:
分析的最后阶段对压力梯度进行积分,以提取积分区域内的压力场,其大小可达整个视场;两张流场数据可分析得出一张压力场图,再将对应的鱼体100等分导入界面,通过最邻近法,将鱼体轮廓上的每个点都映射到流体中最近的压力点上,并获得指定的压力;
将压力数据导入自定义程序Fish get forces and torques进行基于压力的力和力矩计算,当压力效应充分主导剪切效应时,根据
F(t)=-∫n pdA+∫τ·ndA
估算得出鱼类所经历的运动力;n是法线单位向量,指示身体垂直向外的方向;τ是粘性应力张量,F是作用在身体上的力;假设鱼体密度是均匀分布的,识别质心位置,计算瞬时力矩臂向量,根据
T(t)=-∫p(r×n)dA+∫r×(τ·n)dA
估算力矩;T是作用在身体上的力矩,r是力矩臂向量,从旋转中心,即鱼的质心开始测量;t是时间,A是表面积,p是流体中的压力;其中表面积A可通过观察图5中鱼体部分表面积的粒子来计算,利用Ramanujan近似估计椭圆的半周长和切片厚度,最后根据瞬时力和力矩的估算值,绘制受力图和力矩图。
本专利可达到以下有益效果:
本发明在水槽中置入中性浮力藻类细胞做示踪粒子,在水槽旁侧的激光器架上置入红外线激光器,激光器产生的激光照亮个体鱼周身,避免采用激光片成像中产生的阴影,在所照亮区域的上方架设两台高速摄像机,控制摄像机支架调整好拍摄视野和摄像头角度,同时拍摄俯视图和侧视图,将拍摄的视频导入电脑中进行相关分析。解决了目前粒子图像测速装置灵活度较低、粒子图像测速装置在变坡水槽中的应用精确度较低、明亮绿色激光的照射会改变鱼类行为和激光片PIV成像产生阴影的问题。
本发明可以调节水槽的坡度,利用蜗轮蜗杆的自锁功能,可以稳定、灵活地调节坡度大小。
附图说明
下面结合附图和实施例对本发明作进一步说明:
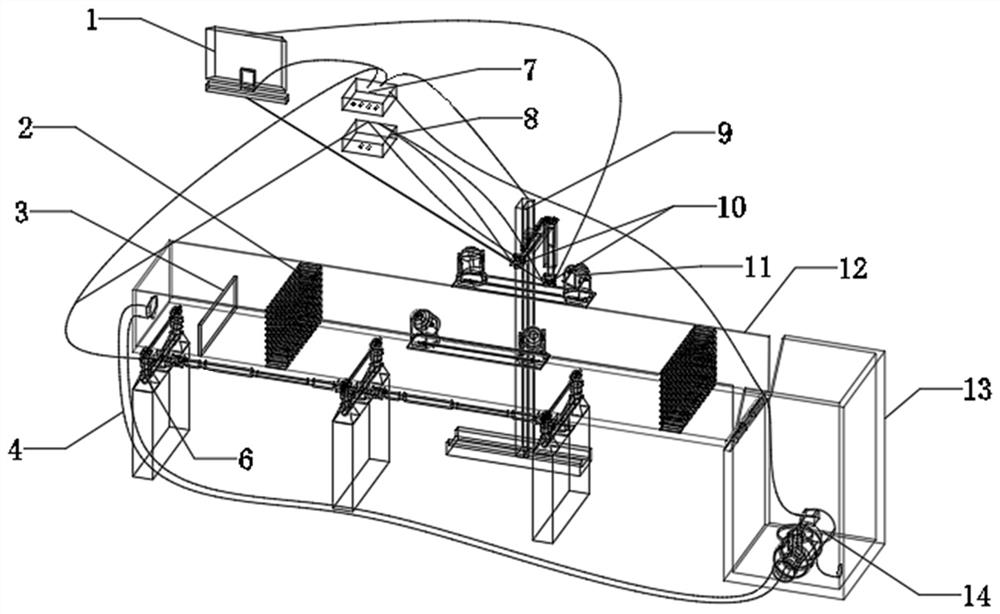
图1为本发明红外海藻粒子图像测速装置结构图;
图2为本发明摄像机支架结构图;
图3为本发明变坡升降器原理图图一;
图4为本发明变坡升降器原理图图二;
图5为本发明水动力学分析计算的流程示意图;
图6为本发明MATLAB的子数据库PIVlab分析的流场示意图;
图7为本发明MATLAB自定义程序Queen2.0分析的压力场示意图。
图中:电脑1、整流栅2、挡水板3、水管4、变坡升降器6、滑轨601、滑块602、第一螺纹升降杆603、第二螺纹升降杆604、第三螺纹升降杆605、蜗轮606、蜗杆607、控制器7、同步控制器8、摄像机支架9、伸缩杆91、紧固螺丝92、摄像机10、红外激光器11、水槽12、水箱13、水泵14。
具体实施方式
优选的方案如图1至图7所示,一种红外海藻粒子图像测速装置,包括设置在水槽12上的红外激光器11,水槽12旁设有摄像机支架9,摄像机支架9上设有至少两台摄像机10,摄像机10与电脑1电性连接;所述的水槽12为透明水槽。
进一步地,水槽12一端设有进水口,水槽12另一端连通水箱13,水箱13内设有水泵14,水泵14通过管道与进水口连通;水槽12内设有挡水板3,挡水板3靠近进水口设置,挡水板3下游端设有两块整流栅2,两块整流栅2之间的区域为试验测量区域;红外激光器11位于试验测量区域上方。
透明水槽的规格为长×宽×高为448cm×78cm×45cm,水泵14可选择变频器控制,实验时通过水泵14转速大小来控制水流大小,挡水板3可起到溢流稳流效果,整流栅2可以使水流均匀。
进一步地,摄像机10包括垂直拍摄用摄像头和水平拍摄用摄像头,垂直拍摄用摄像头和水平拍摄用摄像头分别通过两个伸缩杆91固定。
伸缩杆91包括滑槽,滑槽与滑杆滑动配合,滑槽侧壁开设有螺纹孔,螺纹孔与紧固螺丝92连接,紧固螺丝92用于固定滑杆;两个伸缩杆91中的一个伸缩杆91水平设置在试验测量区域上方,另一个伸缩杆91垂直设置在水槽12外壁外侧。
进一步地,水槽12底部设有变坡升降器6,变坡升降器6用于调节水槽12坡度。
进一步地,包括设置在水槽12底部的滑轨601,滑轨601上设有多个滑块602,滑块602与螺纹升降杆铰接设置,螺纹升降杆与蜗轮606螺纹配合,蜗轮606通过蜗杆607驱动旋转;水槽12一端与水箱13铰接设置。
进一步地,螺纹升降杆包括第一螺纹升降杆603、第二螺纹升降杆604和第三螺纹升降杆605,第一螺纹升降杆603、第二螺纹升降杆604和第三螺纹升降杆605的螺纹距依次减小。
进一步地,红外激光器11的数量至少包括四个,多个红外激光器11设置在试验测量区域上方两侧。
与第一螺纹升降杆603、第二螺纹升降杆604和第三螺纹升降杆605相配合的蜗轮606的内螺纹也相应地适配。蜗杆607同时带动三个蜗轮606转动,第一螺纹升降杆603、第二螺纹升降杆604和第三螺纹升降杆605由于螺纹距的不同,其上升的高度也不同,因此使水槽12倾斜设置。当水槽12倾斜时,滑块602会相应地滑动,滑块602会发生角度变化,但是滑块602与螺纹升降杆铰接设置,螺纹升降杆任然可以支持水槽12。
长×宽×高为448cm×78cm×45cm透光性良好的透明玻璃水槽,通过控制器调整水槽坡度以达到调整流速的目的。均匀撒入中性浮力海藻细胞作为示踪粒子,在水槽底部有贴有黑色遮光纸的胶纸,将红外激光器固定在可以旋转移动的支架上,转动4个红外激光器11至合适的方位和角度,拧紧固定螺栓以固定红外激光器11,红外激光器分别从四个方向充分照明实验区,提供个体鱼周身流动的全场照明。
根据鱼体大小和实验区域,控制支架的移动来确定摄像机的拍摄范围,摄像机支架旋转感应器与变坡升降器相关联,通过控制器令水槽坡度改变到规定数值后的同时,同步控制器同步改变两个摄像机的旋转角度至规定数值。确定拍摄视野合适后,在实验区域放入实验鱼,经历一定的适应时间后,通过同步控制器控制正、侧两个摄像机同时开始拍摄水槽的俯视图和侧视图。高速摄像头在支架的固定下利用光学景深记录任意平面内的粒子移动,摄像头连接电脑,生成拍摄视频。
将拍摄的视频导入Virtual Dub转成图片,将图片导入MATLAB的子数据库PIVlab互相关分析计算得出流场数据,将流场数据导入MATLAB自定义程序Queen2.0计算得出压力场数据,两张流场数据可分析得出一张压力场图,再将对应的鱼体100等分导入界面,通过描点拾取鱼体表面的压力数据;将压力场数据和图片导入MATLAB自定义程序Fish getforces and torques估算得出身体表面力和力矩。
本发明通过水泵的抽吸达到动水要求,控制器控制水泵、变坡升降器和摄像机支架,变坡水槽的升降系统中的每个蜗轮蜗杆升降器中蜗轮与蜗杆之间的传动比均预先设计好,在所有升降器同时上升或下降过程中使水槽倾斜,确保每个升降器顶部均能与水槽底部维持良好的顶压配合状态。变坡升降器可根据水槽的长度和升降器摆放的位置进行调整。
在整流栅的作用下,携带中性浮力藻类细胞的均匀水流经过实验区。通过红外激光器发射激光,与前人采用的绿色激光片相比,使用该红外激光阵列照明消除了激光片PIV成像的阴影,提供了个体鱼周身的全场照明,更明亮的照亮鱼体,极大的简化了后续的体液图像分割;同时有研究表明红外激光对鱼类行为几乎不产生影响,避免了采用绿光对鱼类视觉影响过大的问题。示踪粒子是否能够准确的反应实际流体质点的位置决定了PIV测试系统的准确性。示踪粒子必须要足够小,才能保证良好的跟随性,但又不能太小使其光反射性能无法满足相机的要求,而降低了其成像可见性。本装置采用具有良好的水流场跟随性的中性浮力海藻细胞作为示踪粒子(平均直径14μm),提高了粒子图像测速装置的精度,避免了在实验区引入较大的银或塑料颗粒,同时也更加生态、环保,避免实验后的废水造对成水体污染,减少了废水处理成本。
优选地,摄像机支架可采用电动机械手支架,根据实验需求,由控制器控制支架通过传感器旋转带动实现每一个部件的移动。摄像机支架与变坡升降器间联动,当水槽坡度改变时,摄像机支架实现相应的角度旋转,令俯视图摄像机始终与水槽底部平面保持平行,侧视图摄像机始终与水槽底部平面保持垂直。变坡升降器通过控制器进行控制,再通过同步控制器根据升降器的坡度变化联动控制摄像机支架中升降器中弹性固定器旋转传感器的旋转角度至相同数值。
实验区摄像机支架固定的两台高速摄像机分别拍摄俯视图和侧视图(俯视图摄像机型号为Photron FASTCAM MiniAX200,侧视图为PhotronAX50,镜头使用Nikon MicroNikkor,105mm,f/2.8微距镜头)。摄像机与电脑相连,放入实验鱼进行实验,实验开始时通过同步控制器控制两台高速摄像机同时开始录像,在红外线的照明条件下,使用摄像机记录光学景深中的粒子,从而只捕捉到在流体薄切片内的粒子运动,将视频影像同步到电脑中进行分析。
优选的方案中,所述的红外海藻粒子图像测速装置的测量方法,包括如下步骤:
S1:在水槽12底部贴黑色遮光纸的胶纸,调节多个红外激光器11的位置并固定,使红外激光器11充分照射在试验测量区域;
S2:向水槽12内的水体内撒入中性浮力海藻细胞作为示踪粒子;
S3:摄像机10记录光学景深中的粒子移动,摄像机10将信号传输给电脑1生成拍摄视频;
S4:将拍摄的视频导入Virtual Dub转成图片,将图片导入MATLAB的子数据库PIVlab互相关分析计算得出流场数据,将流场数据导入MATLAB自定义程序Queen2.0计算得出压力场数据,两张流场数据可分析得出一张压力场图,再将对应的鱼体多等分导入界面,通过描点拾取鱼体表面的压力数据;将压力场数据和图片导入MATLAB自定义程序Fish getforces and torques估算得出身体表面力和力矩;
进一步地,步骤S4的方法为:
将拍摄的视频导入Virtual Dub转成图片,在MATLAB中运行PIVlab脚本,将筛选后的图片序列导入PIVlab中,通过鱼体掩蔽屏蔽鱼体轮廓范围内的速度矢量计算,对相邻图像间询问区域尺寸逐步减小为128×128、64×64、32×32像素,重叠50%,采用FTT算法进行相关交叉性分析,以得出询问区域中最可能的粒子位移和已知的时间间隔相除,再经过后处理得出流场图,即互相关分析;互相关是一种统计模式匹配算法,其试图从位于询问区域B的询问区域A中找到粒子图像;该算法通过离散的互相关函数来实现:
C(m,n)=∑
其中A和B是来自图像A和图像B的相应询问区域;得到的相关矩阵C中强度峰值的位置给出了粒子从A到B的最可能位移;
将速度矢量和涡量数据导入Queen2.0中,对于不可压缩流动,利用Navier-Stokes方程通过求解由瞬时速度和材料加速度间接计算压力p:
分析的最后阶段对压力梯度进行积分,以提取积分区域内的压力场,其大小可达整个视场;两张流场数据可分析得出一张压力场图,再将对应的鱼体100等分导入界面,通过最邻近法,将鱼体轮廓上的每个点都映射到流体中最近的压力点上,并获得指定的压力;
将压力数据导入自定义程序(Fish get forces and torques)进行基于压力的力和力矩计算,当压力效应充分主导剪切效应时,根据
F(t)=-∫n pdA+∫τ·ndA
估算得出鱼类所经历的运动力;n是法线单位向量,指示身体垂直向外的方向;τ是粘性应力张量,F是作用在身体上的力;假设鱼体密度是均匀分布的,识别质心位置,计算瞬时力矩臂向量,根据
T(t)=-∫p(r×n)dA+∫r×(τ·n)dA
估算力矩;T是作用在身体上的力矩,r是力矩臂向量,从旋转中心(鱼的质心)开始测量;t是时间,A是表面积,p是流体中的压力;其中表面积A可通过观察图5中鱼体部分表面积的粒子来计算,利用Ramanujan近似估计椭圆的半周长和切片厚度,最后根据瞬时力和力矩的估算值,绘制受力图和力矩图。
上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
- 红外海藻粒子图像测速装置及其测量方法
- 一种基于粒子图像测速技术的加速度测量方法及装置