光学器件的安装系统
文献发布时间:2023-06-19 11:19:16
本申请是基于2015年6月24日提交的专利申请号为201580034669.5(PCT/IB2015/054732)、名为“光学器件的安装系统”的申请(进入中国国家阶段日期:2016年12月26日)的分案申请。
技术领域
本发明的实施例涉及安装系统领域,并且特别地,涉及一种用于将光学元件安装到印刷电路板(PCB)的系统和方法。
背景技术
在设计用于将假牙植入口腔中的口腔修复过程中,可能精确地测量和仔细地研究将要植入假体的牙位,使得能够对诸如牙冠、义齿或齿桥这样的假体进行适当地设计和尺寸计算,以配合就位。良好的配合,例如,使得能够在假体与颌之间适当地传递机械应力,并且使经由假体与牙位之间的相互作用引起的牙龈的感染最小化。
一些过程要求制造可拆装的假体以替代一个以上的缺失的牙齿,诸如部分或全部的义齿,在该情况下,可以精确地重造牙齿缺失的区域的表面轮廓,使得得到的假体在对软组织具有均匀压力的情况下配合在缺齿区域。
在一些实践中,牙科医师准备牙位,并且构建牙位的正向物理模型(positivephysical model)。可选择地,可以扫描牙位,以提供牙位的三维(3D)数据。在任一情况下,可以将牙位的虚拟或真实模型发送到基于模型制造假体的牙科实验室。然而,如果模型在某些区域中是有缺陷的或不明确的,或者如果用以收纳假体的制备不是最优构成,则假体的设计可能不是最优。例如,如果用于紧密配合的顶盖的制备所限定的插入路径会导致假体与相邻牙齿碰撞,则所述顶盖的几何结构可能被改变,以避免碰撞。此外,如果包含终止线的制备区域缺少限定,则可能不能适当地确定终止线,并从而可能不能适当地设计所述顶盖的下缘。事实上,在一些情况下,模型被排斥,而后牙科医师重新扫描牙位,或者重做所述制备,使得可以生产合适的假体。
在正畸过程中,重要的是提供一个或两个颌的模型。在虚拟设计这样的正畸过程的情况下,口腔的虚拟模型也是有益的。可以通过直接扫描口腔,或者通过生产齿列的物理模型,而后利用适当的扫描仪扫描该模型而得到这样的虚拟模型。
从而,在口腔修复和正畸过程中,得到口腔中的牙位的3D模型可以是进行的初始过程。当3D模型是虚拟模型时,牙位的扫描越完整越精确,虚拟模型的质量越高,并从而设计最优的假体或正畸治疗矫正器的能力越强。
附图说明
在附图的图形中,通过实例的方式并且非限制性地图示出了本发明。
图1示出根据一个实施例的光学装置的功能性方框图。
图2示出根据一个实施例的光学系统的分解透视图。
图3示出根据一个实施例的安装系统的立体图。
图4A示出处于热中性构造中的图3的安装系统的侧视图。
图4B示出处于热中性构造中的图3的安装系统的顶视图。
图5示出处于热膨胀构造中的图3的安装系统的侧视图。
图6A示出根据一个实施例的包括两个弯曲部的安装系统的实施例的顶视图。
图6B示出根据一个实施例的包括三个弯曲部的安装系统的实施例的顶视图。
图6C示出根据一个实施例的包括六个弯曲部的安装系统的实施例的顶视图。
图6D示出根据一个实施例的包括八个弯曲部的安装系统的实施例的顶视图。
图7是示出光学元件的安装方法的流程图。
具体实施方式
本文描述的安装系统包括基部和装接到基部的若干弯曲部。基部可以定义与z轴垂直的基平面,并且弯曲部可以是材料片,其在z轴方向上从基部突出,并且在从z轴辐射的对应的y轴的方向上大致扁平。
通过将弯曲部装接到安装元件,可以将被安装元件安装到基部。弯曲部可以被布置成使得被安装元件和/或基部的热膨胀或收缩使弯曲部向外或向内弯曲,例如在对应的y轴的方向上弯曲,而不在其它任何方向上弯曲的弯曲部,其它方向例如为垂直于y轴和z轴的方向。从而,弯曲部允许被安装元件在安装系统的构件上以最小的应力热膨胀或收缩,而防止被安装元件相对于基部的平移或旋转运动。
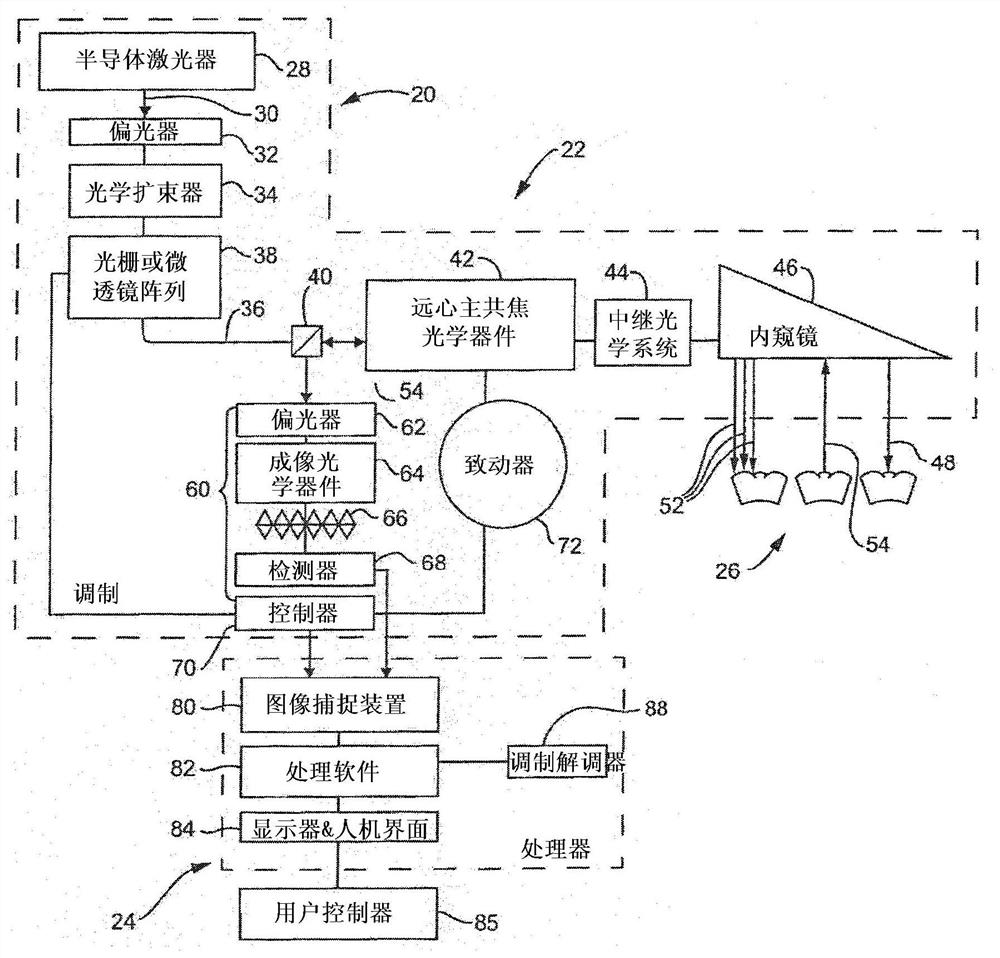
图1示出根据一个实施例的光学装置22的功能性方框图。光学装置22可以是扫描仪,诸如口内腔扫描仪。光学装置22包括发出光的光源,诸如射出激光(由箭头30表示)的半导体激光器28。光通过偏光器32,偏光器32使通过偏光器32的光发生特定偏振。然后光进入提高光束30的数值孔径的光学扩束器34。然后,光通过将母束30分成多个入射光束36的模块38(例如,光栅或微透镜阵列),为了方便图示,在图1中由单线表示多个入射光束36。例如,模块38可以将母束30分成光束的二维阵列。
光学装置22还包括分束器40,其使得来自激光源的光能够通过下游的光学器件来传递,但是使在相反方向上行进的光改变方向。从而,分束器40可以将来自模块38的光束的二维阵列传输到目标(经由下游光学器件),但是将从目标反射的光束的二维阵列重定向到检测器(如下所述)。在其他实施例中,也可以使用具有类似功能的其它光学部件,例如,具有小的中心孔径的半透明的反射镜,而不是分束器。反射镜中的孔径提高了设备的测量精度。
光学装置22还包括以远心模式运行的共焦光学器件42、中继光学器件44和内窥镜46。在一个实施例中,远心共焦光学器件避免距离引起的放大率变化,并且在Z方向上的宽范围的距离上维持图像的相同的放大率(Z方向是光束传播的方向,也称为Z轴或透镜光轴)。中继光学器件44使得能够维持光束传播的特定数值孔径。
内窥镜46通常包括刚性的光传输介质。刚性的光传输介质可以是在其内限定了光传输路径的中空物体,或由透光材料制成的物体(例如,玻璃体或管)。内窥镜通常在其端部包括确保完全内部反射这种类型的反射镜。该反射镜可以使入射光束指向正被扫描的牙齿区段26。从而,内窥镜46发出多个入射光束48,冲击在牙齿区段26的表面上。
入射光束48形成沿着Z轴传播的布置在XY平面中的光束的阵列。如果入射光束撞击到的表面是粗糙面,则在不同(Xi,Yi)的位置,照明点52沿着Z轴彼此移位。从而,虽然一个位置的点可能处于光学器件42的焦点处,但是其它位置的点可能处于非焦点处。因此,聚焦点的返回光束(参见下文)的光强度将处于其峰值,而其它点处的光强度将不处于峰值。从而,对于各照明点,在沿着Z轴的不同位置处进行光强度的多次测量。对于每个这样的(Xi,Yi)的位置,通常进行强度对距离(Z)的求导,Zi产生最大导数,Z0,将是聚焦距离。如以上所指出地,作为使用半透明反射镜40的结果,当不聚焦时,入射光在表面上形成光盘,并且仅当聚焦时,形成完整的光斑,当接近聚焦位置时,距离导数将变大,从而提高测量的精度。
从各个光斑散射的光包括这样的光束,该光束最初在Z轴上沿着与入射光束所行进的光路相反的方向行进。各个返回的光束54对应于入射光束36中的一个光束。鉴于分束器40的非对称性,返回的光束被反射至检测光学器件60的方向。检测光学器件60包括偏光器62,其具有与偏光器32的平面偏振垂直取向的优选偏振平面。返回的偏振光束54通过成像光学器件64,通常是一个以上的透镜,并且然后经过包括针孔阵列的矩阵66。诸如CCD(电荷耦合器件)照相机这样的检测器68具有传感元件的矩阵,传感元件均表示图像的一个像素,并且每个传感元件均对应于阵列66中的一个针孔。从而,检测器68可以包括传感器的二维阵列,其中每个传感器均确定冲击在传感器上的光的强度。
检测器68连接于处理器单元24的图像捕捉模块80。从而,由处理器24接收和分析在检测器68的各传感元件中测量的各光强度。
光学装置22还包括控制模块70,其连接于半导体激光器28和致动器72二者的控制操作部。致动器72连结到远心共焦光学器件42,以改变共焦光学器件42的焦平面沿着Z轴的相对位置。在单一序列的操作中,控制模块70促使致动器72使共焦光学器件42移位,从而改变焦平面位置,并且然后,在收到位置已经改变的反馈之后,控制模块70将诱导激光器28产生光脉冲。同时,控制模块70使图像捕捉模块80同步,以从检测器68的各传感元件获取表示光强度的数据。然后,在随后的序列中,焦平面将以相同的方式改变,并且将在宽的焦点范围上继续捕捉数据。
图像捕捉装置80连接于处理软件82,处理软件82然后确定在光学器件42、44的整个焦平面的范围上的各像素的相对强度。如上所述,一旦特定的光斑聚焦,则测量强度将最大。从而,对于各像素,通过确定对应于最大光强度的Zi,或者通过确定光强度的最大位移导数,能够确定各个光斑的沿着Z轴的相对位置。从而,能够得到表示牙齿区段中的表面的三维图案的数据。该三维表示可以显示在显示器84上,并且通过用户控制模块86(例如,计算机键盘、触摸板、鼠标等)操作以观看,例如,从不同的角度观看,放大或缩小观看。另外,可以通过适当的数据端口,例如,调制解调器88,通过任意通信网络(例如,局域网(LAN),广域网(WAN),诸如因特网这样的公众网络等)将表示表面拓扑的数据传递给接收者。
在实施例中,使用如下文更详细地描述的弯曲部的布置,可以将一个以上的光学元件(例如,偏光器32、光学扩束器34、微透镜阵列38、分束器40、共焦光学器件42、检测光学器件60等)安装到基部。弯曲部可以以如下方式固定光学元件:在安装系统的构件上的应力最小的情况下,允许光学元件和/或基部的热膨胀或收缩,然而防止已经安装的元件相对于基部的平移或旋转运动。从而,可以在整个温度变化中保持光学构件的适当对准。
图2示出根据一个实施例的光学系统100的分解透视图。光学系统100可以被包括在诸如口内腔扫描仪这样的扫描仪中,其可以具有诸如以上关于图1描述的那些附加构件。光学系统100包括检测器110,其检测冲击在检测器100的一个以上的位置处的一个以上的光的强度。检测器110可以包括传感器的二维阵列,其中,每个传感器都检测冲击在传感器上的光的强度。在一个实施例中,检测器110包括CCD(电荷耦合器件)照相机。
光学系统100包括朝着检测器110重定向光的光学元件120。光学元件120使得来自光源(由箭头191表示)的光能够朝向目标(由箭头192表示)而通过光学元件120,但是将从目标反射(由箭头193表示)的光沿着检测轴(由箭头194表示)朝向检测器110重定向。光学元件120可以包括例如分束器。在另一实施例中,光学元件120可以包括半透明的反射镜。光学元件可以包括例如玻璃或塑料或者任何透明的或反光的材料。
光学元件120可以被壳体122包围或者容纳在壳体122中(如图2中的局部剖面所示)。在一个实施例中,壳体122是金属,例如,铝。光学元件120可以利用一个以上的双头螺栓124而结合到壳体122。双头螺栓124可以包括:头部125,其装接到光学元件120的底部;以及根部126,其装接到壳体122。
检测器110可以安装到基部112,基部诸如是由FR-4、FR-2、BT-环氧树脂、氰酸酯、聚酚亚胺、聚四氟乙烯(PTFE)或其它材料构成的印刷电路板(PCB)。基部112可以包括导电线路,该线路连接到处理装置以接收由检测器110生成的强度数据。基部112定义了与检测轴大致垂直的基平面。
光学系统100包括用于将光学元件120结合到检测器110的多个弯曲部130A-130D。而图2示出具有四个弯曲部130A-130D的光学系统100,光学系统100可以包括更多或更少的弯曲部。例如,在一个实施例中,光学系统100包括可以被安置在检测器110的相对侧上的两个弯曲部。在另一实施例中,光学系统100包括三个以上的弯曲部。在一个实施例中,光学系统100包括八个弯曲部。
每个弯曲部130A-130D都可以是结合到基部112并且从基部112突出的大致扁平的材料片。例如,弯曲部130A-130D可以焊接(welded)或锡焊(soldered)到基部112。在一个实施例中,弯曲部130A-130D是铜铍合金。弯曲部130A-130D还可以由其它高强度柔性材料构成,例如其它金属。虽然弯曲部130A-130D可以是大致扁平的,但是每个弯曲部130A-130D的装接面139A-139D都可以被纹理化以改善与光学元件120或壳体122的相应装接面129A-129D的装接。
如上所述,图2是光学系统100的分解视图。一旦构造而成,弯曲部130A-130D将检测器110结合到光学元件120。在一个实施例中,光学系统100的构造包括使光学元件120与检测器110对齐,使得重定向后的光194的中心(例如,光束的二维阵列的中心)被重定向到检测器110的中心。在一个实施例中,弯曲部130A-130D通过装接到壳体122而结合到光学元件120。在一个实施例中,弯曲部130A-130D粘合到壳体122。在一个实施例中,胶水施加到弯曲部130A-130D的装接面139A-139D,并且装接面139A-139D粘合到壳体122的相对应的装接面129A-129D。
弯曲部130A-130D可以被布置成使得光学元件120(或壳体122)相对于检测器110的热膨胀或收缩使弯曲部向外或向内弯曲,例如在从检测轴辐射的方向上弯曲,而使弯曲部不在任何其它方向上弯曲,其它方向例如为与辐射方向和检测轴方向垂直的方向。例如,弯曲部可以向外弯曲直到一毫米,而在其它方向上的弯曲可以被限制到小于一微米,保持了对准的亚微米精度。从而,弯曲部130A–130D允许光学元件120(或壳体122)在安装系统200的构件上以最小应力的的热膨胀或收缩,而防止了光学元件120相对于检测器110的平移或旋转运动。由于光学元件120(例如,由玻璃构成的分束器)具有与检测器110或基部112中的至少一者的第二热膨胀系数不同的第一热膨胀系数,所以可能发生热膨胀或收缩。
图3示出根据一个实施例的安装系统200的立体图。安装系统200可以包括图2的基部112和弯曲部130A–130D。虽然图3中示出四个弯曲部130A–130D,但是安装系统200可以包括更多或更少的弯曲部。如上所述,检测器与光学元件可以使用安装系统200而结合在一起。然而,安装系统200可以用于结合其它构件。
基部112包括定义了与z轴132垂直的基平面的大致平坦表面。弯曲部130A–130D是在z轴132的方向上从基部突出的大致扁平的材料片。弯曲部130A–130D分别与垂直于z轴的xy轴134A-134D相关联,其中,每个y轴都垂直于z轴并且从z轴辐射,并且其中,每个x轴都垂直于z轴和对应的x轴。xy轴134A-134D可以由横跨相应的xz平面的装接面定义,该xz平面被称为弯曲平面,其垂直于基平面并且从而平行于z轴。弯曲平面进而定义了垂直于弯曲平面(例如,沿着y轴)的弯曲线136A-136D。弯曲线136A-136D在交点138汇合。弯曲部130A-130D可以为沿着各自的弯曲线136A-136D是柔性的,并且垂直于各自的弯曲线136A-136D是刚性的。
关于图3,弯曲部130A-130D包括:第一弯曲部130A,其定义第一弯曲线136A;第二弯曲部130B,其定义了与第一弯曲线136A共线的第二弯曲线136A;第三弯曲部130C,其定义了垂直于第一弯曲线136A的第三弯曲线136C;以及第四弯曲部130D,其定义了与第三弯曲线136C共线的第四弯曲线136C。弯曲线136A-136D在交点138处汇合。
如上所述,光学元件120可以对准检测器110,使得重定向后的光194的中心(例如,光束的二维阵列的中心)被重定向到检测器110的中心。检测器110可以安装在基部上,使得弯曲部围绕而不接触检测器110。因为弯曲部130A-130D沿着各自的第一轴是刚性的,并且沿着各自的第二轴是柔性的,各自的第一轴和各自的第二轴与检测器的面大致平行,所以交点138提供了系统的平稳点,使得重定向后的光194被重定向到检测器的中心,而与系统的构件的热膨胀或收缩无关。而且,光学元件120可以保持固定位置,使得在宽范围的热条件下,检测器的各个像素保持与各个源光束对准到亚微米的精度和稳定性。
在一个实施例中,被安装元件(诸如图2的光学元件120和壳体122)包括大致平坦的装接面(诸如图2的壳体122的装接面129A-129D),装接面分别定义面对平面,三个以上的面对平面分别与一个弯曲平面平行。安装被安装元件包括使被安装元件对准检测器,并且例如通过将弯曲部130A-130D的装接面粘合到被安装元件的装接面,而将弯曲部130A-130D装接到被安装元件。被安装元件可以被安装到基部112,使得被安装元件的中心对准交点138。
每个弯曲部130A-130D都可以具有在第一方向上(例如沿着z轴)的高度、在第二方向上(例如沿着y轴)的厚度,以及在第三方向上(例如沿着x轴)的宽度。在一个实施例中,厚度显著地小于高度和宽度。例如,在一个实施例中,厚度小于高度和宽度的十分之一。在一个实施例中,厚度小于一毫米,并且高度和宽度至少是十毫米。在一个实施例中,宽度大于高度。例如,宽度可以比高度大至少20%。在另一实施例中,宽度和高度大致相等。
在一个实施例中,弯曲部130A-130D在装接于基部112的一端处以大约90度的角度弯曲。这可以提供较大的表面面积,以将弯曲部130A-130D装接到基部112。在一个实施例中,弯曲部130A-130D的弯曲端被划分为多个部分(例如,三个部分),一个以上的部分在第一方向上以90度弯曲,并且一个以上的其它部分在相反方向上以90度弯曲。
图4A示出处于热中性构造中的图3的安装系统200的侧视图。图4B示出处于热中性构造中的图3的安装系统200的顶视图。在图4A-4B的热中性构造中,弯曲部130A-130D结合到被安装元件300并且不弯曲。如果被安装元件300由于被安装元件300与安装系统200和/或基部的材料的热膨胀系数的差异,而经受相对于安装系统200和/或基部的热膨胀或收缩,则安装系统可以处于热膨胀或热收缩构造。
图5示出处于热膨胀构造中的图3的安装系统200的侧视图。在热膨胀构造中,弯曲部130A-130D保持结合到被安装元件300,但是在向外的方向上(沿着由弯曲部定义的各y轴)弯曲。从而,弯曲部130A-130D用作板簧,每个弯曲部在一个方向上(例如沿着y轴)提供柔性,并且在正交的方向上(例如沿着x轴)提供刚度。如图5所示,弯曲部130A-130D的仅一部分可以弯曲。特别地,装接到被安装元件300的部分和靠近基部112的部分可以保持固定位置。
虽然弯曲部130A-130D向外弯曲,使得被安装元件300能够热膨胀,但是弯曲部130A-130D不在其它方向(例如沿着x轴)上弯曲,保持了被安装元件300相对于基部的对准。另外,每个弯曲部130A-130D都可以以大致相等的量弯曲,并且从而向被安装元件300施加大致相同的力。从而,力平衡化,结果被安装元件300保持了相对于基部112的固定位置。特别地,弯曲部130A-130D可以维持光学元件(诸如分束器)的中心对准到装接于基部112的检测器的中心。而且,存在沿着z轴的非常小的、不显著的移动。
在具有不同的热膨胀系数的材料的光学系统中,弯曲部在一个方向上的弯曲减少了否则将施加于部件上的应力。然而,弯曲部在其它方向上的弯曲或变形的缺失,保持了系统的对准,并且从而,为系统提供了稳定性。
如所示出的,在实施例中,安装系统200及其光学器件不直接附接到检测器。相反,安装系统200附接到基部(例如,PCB),该基部继而附接到检测器。安装系统与检测器之间的不直接连接,理论上可能导致光学器件相对于检测器失于对准。然而,使用实施例中描述的弯曲部的预料不到的结果是:即使在检测器与安装系统之间不直接装接的情况下,在检测器与安装系统200中的光学器件之间也保持了亚微米的对准。在一个实施例中,通过使用具有与检测器的热膨胀系数大致相等的热膨胀系数的基部来促进这种对准。
使用弯曲部130A-130D将光学元件120(或壳体122)装接到基部112,而不是直接地装接到检测器,这使得检测器能够具有最小的包装尺寸。从而,本文所述的实施例有助于装置的小型化,对于这些装置,具有可能不同的热膨胀系数的构件之间的精确的光学对准是重要的。
如上所述,虽然图3中示出四个弯曲部130A–130D,但是安装系统200可以包括更多或更少的弯曲部。图6A-6D示出具有不同数量的弯曲部的安装系统的实施例。
图6A示出根据一个实施例的包括两个弯曲部612A–612B的安装系统610的实施例的顶视图。弯曲部612A–612B安置在被安装元件615的相对侧上。因此,在一个实施例中,安装系统可以包括:基部,其具有限定基平面的大致平坦的表面;以及两个以上的大致扁平的弯曲部,其从基部突出,该两个以上的大致扁平的弯曲部分别限定两个以上的大致垂直于基平面的弯曲平面,所述两个以上的弯曲平面分别限定垂直于所述弯曲平面的两个以上的弯曲线,其中,两个以上的大致扁平的弯曲部分别为:沿着两个以上的弯曲线的各自的弯曲线是柔性的,并且垂直于各自弯曲线是刚性的,并且其中两个以上的弯曲线在交点处汇合。
类似地,光学系统可以包括:检测器,用以检测冲击在检测器的一个以上位置处的一个以上的光的强度;光学元件,用于沿着检测轴朝着检测器重定向光;以及两个以上大致扁平的弯曲部,其将光学元件间接地结合至检测器,两个以上大致扁平的弯曲部分别定义平行于检测轴的两个以上的弯曲平面,两个以上大致扁平的弯曲部分别为沿着各自的第一轴是刚性的并且沿着各自的第二轴是柔性的,各自的第一轴和各自的第二轴大体平行于检测器的面。
图6B示出根据一个实施例的包括三个弯曲部622A–622C的安装系统620的实施例的顶视图。弯曲部622A–622C围着被安装元件625安置,使得由弯曲部622A–622C定义的弯曲线624A–624C在交点628处汇合,并且互相之间形成120度角。从而,弯曲部622A–622C关于被安装元件625是等间距的。在另一实施例中,弯曲部622A–622C不是关于被安装元件625等间距的。
图6C示出根据一个实施例的包括六个弯曲部632A–632G的安装系统630的实施例的顶视图。虽然六个弯曲部632A–632F被示出为以等间距围绕被安装元件635安置,在其它实施例中,弯曲部632A–632F可以不关于被安装元件635等间距。图6D示出根据一个实施例的包括八个弯曲部642A–642H的安装系统640的实施例的顶视图。虽然八个弯曲部642A–632H被示出为以等间距围绕被安装元件645安置,但是在其它实施例中,弯曲部642A–642H可以不关于被安装元件645等间距。
图7是示出光学元件的安装方法700的流程图。方法700以将三个以上的弯曲部装接到基部的方框710开始。基部可以包括例如印刷电路板(PCB)。弯曲部可以在自由端处装接到基部,使得弯曲部从基部突出。在一个实施例中,通过将弯曲部焊接和锡焊到基部而装接弯曲部。在另一实施例中,弯曲部可以粘合到基部或以其他方式附接。
在方框720中,检测器安装到基部。检测器可以安装到基部,使得检测器接触基部的导电线路,以将来自检测器的数据传递到处理器或其它构件。在一个实施例中,检测器粘合或锡焊到基部。检测器可以安装到基部,使得检测器被弯曲部围绕而不与弯曲部接触。
在方框730中,光学元件对准检测器。光学元件可以包括例如分束器。光学元件可以在六个自由度上对准,例如,沿着一组三个正交轴的三个平移方向和围绕所述轴的三个旋转方向。光学元件可以以亚微米精度对准。
在方框740中,三个以上的弯曲部装接到光学元件。在一个实施例中,三个以上的弯曲部粘合到光学元件(或者包围光学元件的壳体)。在一个实施例中,胶水涂抹到弯曲部,并且弯曲部抵压光学元件或壳体的一部分。在一个实施例中,在对准之前,弯曲部粘合到光学元件或壳体,并且在已经进行对准之后,胶水固化。在另一实施例中,弯曲部以其他方法装接到光学元件。
应理解以上描述意在阐明,而非限制。在阅读和理解上述描述之后,很多其它实施例将变得明显。虽然已经参考特定示例实施例描述了本发明的实施例,但是将认识到,本发明不限于上述实施例,而是能够在所附的权利要求的原理和范围内以修改和变换来实施。因此,说明书和附图被认为是说明性的而不是限制性的。因此,应当参考所附权利要求以及这些权利要求所赋予的等同物的全部范围来确定本发明的范围。
- 光学器件的安装系统
- 光学器件的安装系统