用于足端的压力缓冲装置
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及机器人技术领域,具体涉及一种用于足端的压力缓冲装置。
背景技术
传统液压四足机器人的腿部缓冲装置为脚部弹簧结构,该结构能够在运动过程中为单腿系统提供被动柔顺特性,但这种柔顺特性的效果比较有限,只能用于特定的任务。如果足端点在前向运动过程中遇到障碍物阻碍,弹簧机构仅能够吸收部分的接触冲击,如果单腿不能有效主动地控制足端的前向运动,随着弹簧受力的逐渐增大,机器人受到向后的推力与支撑相的其他腿的前向力冲突,将增大机器人失衡的风险并造成机器人结构的过载损伤。
相关技术中,采用主动柔顺主要有阻抗控制、力位混合控制和动态混合控制等方式解决上述问题,其中,阻抗控制是通过调整机器人末端的刚度,从而使力和位置满足某种理想的动态关系来实现柔顺功能,现有的阻抗控制方法大多从系统的动力学模型出发,将足端三维空间测量力反馈折算为关节力矩,通过关节力矩控制实现足端空间力控制。但是,这种方法要求精确的动力学模型,这对于实际系统来说较为困难。
对于负荷较大的四足机器人(如大象机器人)而言,在行走过程中足端与地面的冲击载荷较大,通过调整机器人末端刚度的方法所需调节刚度的范围过大,在实际操作过程中成本过高且控制难度也将加大。因此,研究能够承受重载的腿部缓冲技术方案意义重大。
发明内容
本发明为解决上述技术问题,提供了一种用于足端的压力缓冲装置,根据足底接触地面时的压力值对第一液压缸和第二液压缸的伸缩量进行控制,以通过第一液压缸和第二液压缸提供缓冲力,相应速度较快,调节范围宽。
本发明采用的技术方案如下:
一种用于足端的压力缓冲装置,所述足端包括:足关节上部、足关节中部和足底,所述装置包括:压力传感器、第一液压缸、第二液压缸和控制器,其中,所述足关节上部与所述足关节中部非接触式连接;所述第一液压缸和所述第二液压缸的缸体可拆卸地对称安装在所述足关节上部的两侧,所述第一液压缸和所述第二液压缸的液压杆可拆卸地对称安装在所述足关节中部的两侧;所述压力传感器可拆卸地分别与所述足关节中部和所述足底相连,用于采集所述足底接触地面时的压力值;所述控制器用于接收所述压力传感器采集的压力值,并根据所述压力值对所述第一液压缸和所述第二液压缸的伸缩量进行控制。
根据本发明的一个实施例,上述的用于足端的压力缓冲装置,还包括:电液伺服阀,所述电液伺服阀分别与所述第一液压缸和所述第二液压缸相连,其中,所述控制器通过电液伺服阀对所述第一液压缸和所述第二液压缸的伸缩量进行控制。
根据本发明的一个实施例,所述第一液压缸和所述第二液压缸的型号相同。
根据本发明的一个实施例,所述足关节中部的内部为空心圆柱。
根据本发明的一个实施例,所述足关节上部包括:对称分布的第一凸肩和第二凸肩、第一圆柱体,其中,所述足关节上部的第一圆柱体套设在所述足关节中部的空心圆柱中;所述足关节上部通过所述第一凸肩和所述第二凸肩分别与所述第一液压缸和所述第二液压缸的缸体可拆卸地连接。
根据本发明的一个实施例,所述足关节中部包括:对称分布的第三凸肩和第四凸肩,其中,所述足关节中部通过所述第三凸肩和所述第四凸肩分别与所述第一液压缸和所述第二液压缸的液压杆可拆卸地连接。
根据本发明的一个实施例,所述第一凸肩和所述第二凸肩分别与所述第一液压缸和所述第二液压缸的缸体通过螺栓连接,所述第三凸肩和所述第四凸肩分别与所述第一液压缸和所述第二液压缸的液压杆通过螺栓连接。
根据本发明的一个实施例,上述的用于足端的压力缓冲装置,还包括:保护壳,所述保护壳分别与所述压力传感器和所述足底可拆卸的连接。
根据本发明的一个实施例,所述保护壳分别与所述压力传感器和所述足底通过螺纹连接。
本发明的有益效果:
本发明根据足底接触地面时的压力值对第一液压缸和第二液压缸的伸缩量进行控制,以通过第一液压缸和第二液压缸提供缓冲力,相应速度较快,调节范围宽;并且通过采用对称分布的大小相同的第一液压缸和第二液压缸,可以保证液压缸在运行过程中提供足够大的轴向载荷,保证其他方向的作用力合力为零,从而保证了整个结构的稳定性。
附图说明
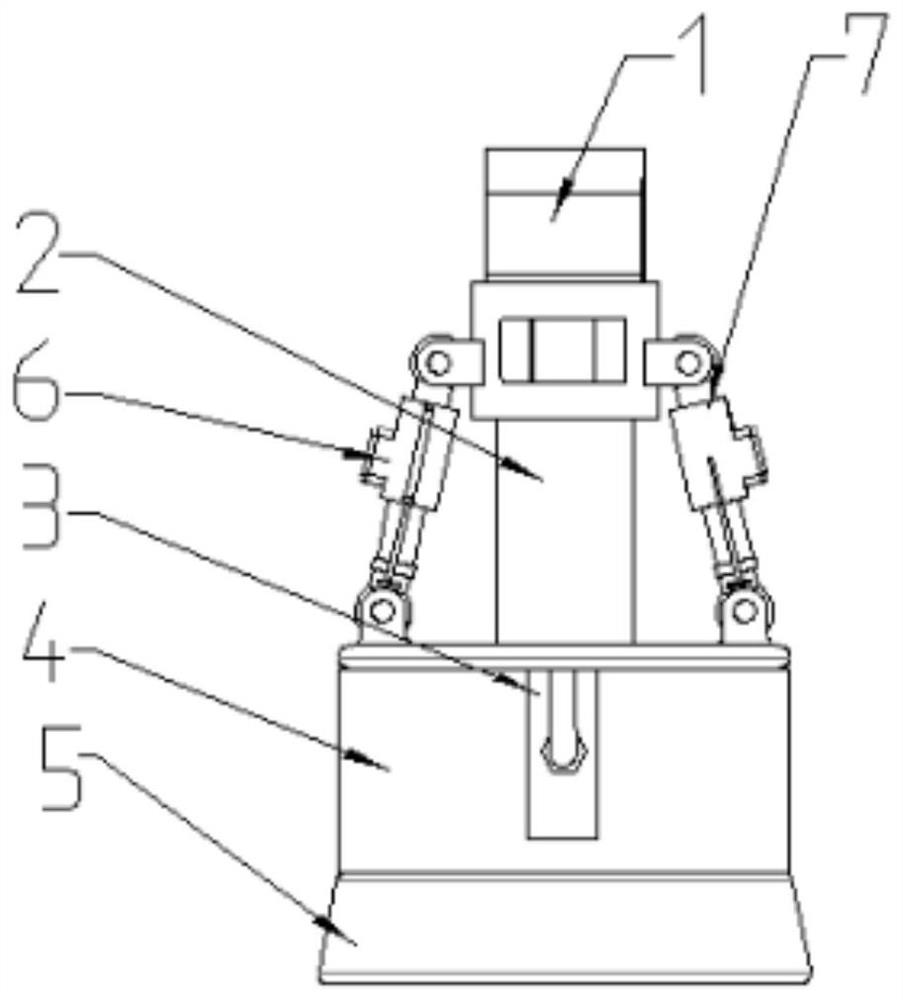
图1为本发明实施例的用于足端的压力缓冲装置的结构示意图;
图2为本发明一个实施例的足关节上部的结构示意图;
图3为本发明一个实施例的足关节中部的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
图1为本发明实施例的用于足端的压力缓冲装置的结构示意图。在本发明的一个实施例中,足端包括:足关节上部1、足关节中部2和足底5。
如图1所示,本发明实施例的用于足端的压力缓冲装置可包括:压力传感器3、第一液压缸6、第二液压缸7和控制器(图中未具体示出)。
其中,足关节上部1与足关节中部2非接触式连接。第一液压缸6和第二液压缸7的缸体可拆卸地对称安装在足关节上部1的两侧,第一液压缸6和第二液压缸7的液压杆可拆卸地对称安装在足关节中部2的两侧。压力传感器3可拆卸地分别与足关节中部2和足底5相连,用于采集足底接触地面时的压力值。控制器用于接收压力传感器3采集的压力值,并根据压力值对第一液压缸6和第二液压缸7的伸缩量进行控制。在本发明的一个实施例中,第一液压缸和第二液压缸的型号相同。
在本发明的一个实施例中,上述的用于足端的压力缓冲装置还可包括:电液伺服阀,电液伺服阀分别与第一液压缸6和第二液压缸7相连,其中,控制器通过电液伺服阀对第一液压缸6和第二液压缸7的伸缩量进行控制。
具体而言,足关节上部1与足关节中部2采用非接触式的连接方式,可以保证第一液压缸6和第二液压缸7能够正常伸缩。采用对称分布的大小相同的第一液压缸和第二液压缸,第一液压缸6和第二液压缸7在工作的过程中,所受的沿足关节轴线方向的分力大小相等方向相同,所受垂直于足关节轴线方向的分力大小相同方向相反,这样可以保证液压缸在运行过程中提供足够大的轴向载荷,保证其他方向的作用力合力为零,从而保证了整个结构的稳定性。在足底接触到地面时,压力传感器3采集此时的压力值,并将该压力值发送给控制器,控制器根据压力值的大小通过电液伺服阀对第一液压缸6和第二液压缸7的伸缩量进行控制,例如,当压力值大于预设压力阈值时,控制器通过电液伺服阀加大第一液压缸6和第二液压缸7拉伸长度,其中,预设压力阈值可根据实际情况进行标定。在本发明的一个实施例中,如图3所示,足关节中部2的内部为空心圆柱12。
根据本发明的一个实施例,如图2所示,足关节上部1可包括:对称分布的第一凸肩9和第二凸肩10、第一圆柱体8,其中,足关节上部1的第一圆柱体8套设在足关节中部2的空心圆柱中;足关节上部1通过第一凸肩9和第二凸肩10分别与第一液压缸6和第二液压缸7的缸体可拆卸地连接。
在本发明的一个实施例中,第一凸肩9和第二凸肩10分别与第一液压缸6和第二液压缸7的缸体通过螺栓连接。
也就是说,通过第一凸肩9和第二凸肩10连接着第一液压缸6和第二液压缸7的缸体,能够将第一液压缸和第二液压缸的缸体部分固定在足关节上部1。并且足关节上部1的第一圆柱体8套设在足关节中部2的空心圆柱12中,这样可以防止足关节在行走过程中出现偏移和倾斜的情况。
根据本发明的一个实施例,如图3所示,足关节中部2可包括:对称分布的第三凸肩11和第四凸肩13,其中,足关节中部2通过第三凸肩11和第四凸肩13分别与第一液压缸6和第二液压缸7的液压杆可拆卸地连接。
在本发明的一个实施例中,第三凸肩11和第四凸肩13分别与第一液压缸6和第二液压缸7的液压杆通过螺栓连接。
也就是说,通过第三凸肩11和第四凸肩13连接着第一液压缸和第二液压缸的液压杆,能够将第一液压缸和第二液压缸的液压杆部分固定在足关节中部2,并且足关节中部2的内部为空心圆柱,能够使第一圆柱体8套设在足关节中部2中,防止足关节在行走过程中出现偏移和倾斜的情况。
参照图1,根据本发明的一个实施例,上述的用于足端的压力缓冲装置,还可包括:保护壳4,保护壳4分别与压力传感器3和足底5可拆卸的连接。其中,保护壳4分别与压力传感器3和足底5通过螺纹连接。
也就是说,为了保护压力传感器免受破坏并固定压力传感器的位置,可以在压力传感器外部设置保护壳,从而保证传感器能正常工作,延长其使用寿命。
综上所述,本发明的用于足端的压力缓冲装置,根据足底接触地面时的压力值对第一液压缸和第二液压缸的伸缩量进行控制,以通过第一液压缸和第二液压缸提供缓冲力,相应速度较快,调节范围宽;并且通过采用对称分布的大小相同的第一液压缸和第二液压缸,可以保证液压缸在运行过程中提供足够大的轴向载荷,保证其他方向的作用力合力为零,从而保证了整个结构的稳定性。
在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本发明的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本发明的实施例所属技术领域的技术人员所理解。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 用于足端的压力缓冲装置
- 多足式机器人足端压力传感器