包括外部安装的指示器的工业机器的接近度检测系统
文献发布时间:2023-06-19 11:26:00
本申请案要求2018年9月25日申请的第62/736,249号美国临时专利申请的权益,所述申请案的全部内容特此以引用的方式并入本文中。
技术领域
本文描述的实施例涉及接近度检测系统。
发明内容
自主工业机器或半自动化工业机器包括对于此类机器能够执行其指定功能来说很重要的各种外部传感器或检测器。接近此类车辆工作的人对车辆对于这些人的动作的感测或作为只有有限的了解。接近度检测系统(“PDS”)或障碍物检测系统(“ODS”)通常并不向场外人员提供任何形式的反馈。此类系统检测到对象的指示可以提供到工业机器的远程或本地操作者,但在外部不提供指示。一些自主机器利用堆叠灯(stack light)来提供基本操作反馈(即,工业机器的操作状态),但该反馈是有限的且与环境有关(例如,无针对性)。
本文描述的实施例提供工业机器周围的视觉或光学反馈。用于工业机器的PDS被配置成监视接近工业机器的对象。PDS被配置成以安全方式控制工业机器的操作以避免碰撞或受阻运动。用于工业机器的控制器被配置成从PDS中包括的传感器接收信号。控制器还被配置成接收PDS的与诸如对象位置、对象接近度和/或对象类型相关的一个或多个输出。控制器被配置成在由PDS检测到的对象的方向上产生光学反馈。例如,根据对象位置、对象接近度和/或对象类型,控制器被配置成产生一个或多个控制信号以控制多个灯的子组。控制所述多个灯的子组向对象提供直接反馈,以指示PDS已检测到所述对象的存在。因此,举例来说,维护人员能够接近工业机器且确信PDS已检测到其存在、正在跟踪其移动,且将对其存在进行适当地反应。如果不存在此类反馈,那么人或车辆接近工业机器可能是危险的。
本文描述的实施例提供一种工业机器,其包括安装到所述工业机器的外部部分的一个或多个指示器。所述一个或多个指示器被配置成向工业机器外部的个人提供接近度检测系统已检测到他或她在工业机器外部的指示。控制所述一个或多个指示器以使用例如不同颜色的光、不同强度的光、不同指示器的激活等等来向所述个人提供指示。所述工业机器是例如炮孔钻机、绳铲车等等。
本文描述的实施例提供一种工业机器,其包括外壳、多个传感器、多个光源和控制器。所述多个传感器连接到所述工业机器。所述多个传感器中的每一个传感器被配置成产生与检测到的接近所述工业机器的外壳的对象相关的输出信号。所述多个光源连接到所述工业机器。所述多个光源中的每一个光源被配置成受控而照亮。控制器连接到所述多个传感器中的每一个传感器和所述多个光源中的每一个光源。控制器包括非暂时性计算机可读介质和处理单元。控制器包括存储于计算机可读介质中的计算机可执行指令以用于控制工业机器的操作以:从所述多个传感器接收输出信号,基于来自所述多个传感器的输出信号确定对象是否接近所述工业机器,将对象分类为第一类型对象或第二类型对象,当对象是所述第一类型对象时产生第一组控制信号以激活所述多个光源的第一子组,且当对象是所述第二类型对象时产生第二组控制信号以激活所述多个光源的第二子组。
本文描述的实施例提供一种提供由接近度检测系统检测到对象的指示的计算机实施的方法。所述工业机器包括外壳、多个传感器、多个光源、处理单元和非暂时性计算机可读介质。所述方法包括:从所述多个传感器接收输出信号,基于来自所述多个传感器的输出信号确定对象是否接近工业机器,将对象分类为第一类型对象或第二类型对象,当对象是所述第一类型对象时产生第一组控制信号以激活所述多个光源的第一子组,且当对象是所述第二类型对象时产生第二组控制信号以激活所述多个光源的第二子组。
本文描述的实施例提供一种用于提供由接近度检测系统检测到对象的指示的控制器。所述控制器包括处理单元和非暂时性计算机可读介质。控制器包括存储于计算机可读介质中的计算机可执行指令以用于控制工业机器的操作以:从所述多个传感器接收输出信号,基于来自所述多个传感器的输出信号确定对象是否接近工业机器,将对象分类为第一类型对象或第二类型对象,当对象是第一类型对象时产生第一组控制信号以激活所述多个光源的第一子组,且当对象是第二类型对象时产生第二组控制信号以激活所述多个光源的第二子组。
在详细解释任何实施例之前,应理解实施例在其应用中不限于在以下描述中阐述或在以下图式中说明的组件的配置和布置的细节。这些实施例能够被实践或以各种方式被实行。此外,应理解本文所使用的措词和术语是出于描述的目的且不应被视为是限制性的。使用“包含”、“包括”或“具有”以及其变体意在涵盖其后列出的项目和其等效物以及额外项目。除非另外指定或限制,否则术语“安装”、“连接”、“支撑”和“联接”及其变化是广泛地使用且涵盖直接以及间接安装、连接、支撑和联接。
另外,应理解,实施例可包括硬件、软件和电子组件或模块,为了讨论的目的可以将其示出和描述为大部分组件是单独以硬件实施。然而,所属领域的技术人员且基于此具体实施方式的阅读将认识到在至少一个实施例中,基于电子的方面可由一个或多个处理单元执行的软件(例如,存储在非暂时性计算机可读介质上)实施,所述处理单元例如微处理器和/或专用集成电路(“ASIC”)。因此,应注意多个基于硬件和软件的装置以及多个不同结构组件可用以实施实施例。举例来说,在说明书中描述的“服务器”、“计算装置”、“控制器”、“处理器”等可包括一个或多个处理单元、一个或多个计算机可读介质模块、一个或多个输入/输出接口以及连接组件的各种连接(例如,系统总线)。
与数量或条件结合使用的例如“约”、“近似”、“基本上”等相对术语将由所属领域的技术人员理解为包括所陈述的值且具有由上下文规定的意义(例如,所述术语至少包括与测量准确性相关联的测量精度、与特定值相关联的公差[例如,制造、组装、使用等)。此类术语还应考虑为公开通过两个端值的绝对值所限定的范围。例如,表述“从约2到约4”也公开了范围“从2到4”。相对术语可以指代加上或减去指示值的百分比(例如,1%、5%、10%或更多)。
本文中描述为由一个组件执行的功能性可由多个组件以分布式方式执行。同样,由多个组件执行的功能可以由单个组件合并且执行。类似地,被描述为执行特定功能性的组件还可以执行本文未描述的其他功能。举例来说,以某种方式“配置”的装置或结构以至少该方式配置,但是还可以以未明确列出的方式配置。
通过考虑详细描述和附图,实施例的其它方面将变得显而易见。
图1示出根据本文描述的实施例的工业机器。
图2示出根据本文描述的实施例的工业机器。
图3示出根据本文描述的实施例的用于工业机器的控制系统。
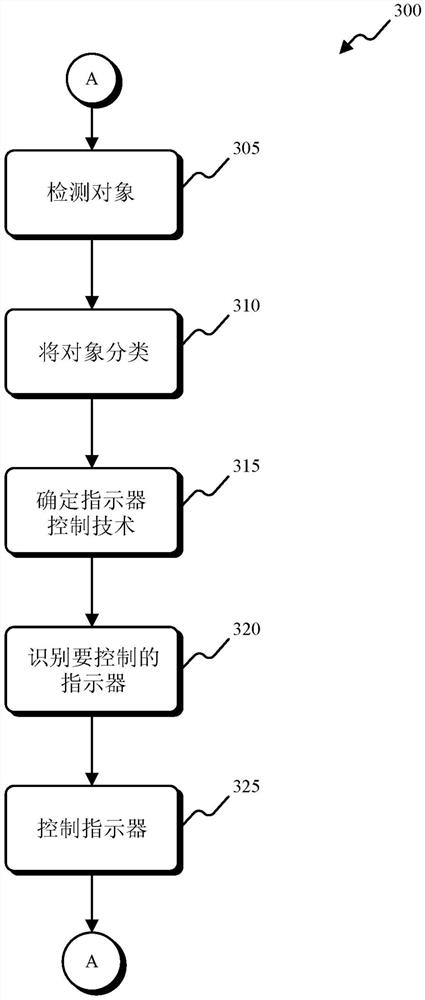
图4是根据本文描述的实施例的用于提供使用接近度检测系统的对象检测的指示的过程。
图5至图11示出根据本文描述的实施例的指示器阵列。
图12A、12B和12C示出根据本文描述的实施例的提供使用接近度检测系统的对象检测的指示的指示器阵列。
具体实施方式
本文描述的实施例提供一种工业机器,其包括安装到所述工业机器的外部部分的一个或多个指示器。所述一个或多个指示器被配置成向工业机器外部的个人提供接近度检测系统已检测到他或她在工业机器外部的指示。控制所述一个或多个指示器以使用例如不同颜色的光、不同强度的光、不同指示器的激活等来向所述个人提供指示。所述工业机器是诸如炮孔钻机、绳铲车等等。
图1示出炮孔钻机10,其包括钻机塔15、在钻机塔15下方支撑钻机塔15的底座20(例如,机器房)、联接到底座20的操作室25,以及由履带驱动器35驱动的、沿着地面40驱动炮孔钻机10的履带30。炮孔钻机10还包括钻机管45,所述钻机管被配置成向下(例如,竖直)延伸穿过地面40并进入钻孔。在一些构造中,多个钻机管45连接在一起以形成延伸进入钻孔的细长钻柱。炮孔钻机10还包括联接到底座20的在地面40上支撑炮孔钻机10的调平千斤顶50,以及联接到底座20和钻机塔15的在底座20上支撑钻机塔15的支架55。钻机塔15包括联接到钻机塔15的驱动钻机头部65的钻机头部马达60,以及将钻机头部65与钻机管45的上部末端75联接在一起的联接件70。炮孔钻机10还包括钻头更换器总成80,其手动地或自主地更换钻机管45的下部末端上的钻头。钻头更换器总成80还存放在炮孔钻机10的运行期间未用到的钻头。炮孔钻机10的其它构造不包括诸如操作室25、支架55或如上文所描述的一个或多个其它组件。炮孔钻机10还包括多个传感器/灯模块85和多个灯模块90。传感器/灯模块85带有用于接近度检测系统(“PDS”,proximity detection system)或对象检测系统(“ODS”,object detection system)的传感器。灯模块90包括类似于传感器/灯模块85中的灯,但仅用以提供视觉反馈而不用于感测。通过在炮孔钻机10的外部周围包括多个传感器/灯模块85和灯模块90,可以激活传感器/灯模块85和灯模块90的子组以向炮孔钻机10外部的对象提供PDS已检测到该对象的存在的针对性指示。
图2示出绳铲车100,其包括联接在底座110与吊杆115之间的用于支撑吊杆115的悬缆105、操作室120以及斗杆125。绳铲车100还包括可以在底座110内卷绕和展开以升高和降低附件或铲斗135的钢丝索或起重缆130,以及连接于另一绞盘(未图示)与门145之间的脱扣缆140。绳铲车100还包括鞍块150和槽轮155。绳铲车100使用四种主要类型的移动:前进和倒退、吊起、推挤(crowd),和转向。前进和倒退会使用履带160向前和向后移动整个绳铲车100。吊起会使附件135上下移动。推挤会延伸和缩回附件135。转向会使绳铲车100围绕轴线165枢转。绳铲车100的总体移动利用前进和倒退、吊起、推挤和转向中的一个或组合。绳铲车100的其它构造不包括诸如操作室120或如上文所描述的一个或多个其它组件。绳铲车100还包括多个传感器/灯模块175和多个灯模块180。传感器/灯模块175带有用于PDS的传感器。灯模块180包括类似于传感器/灯模块175中的灯,但仅用以提供视觉反馈而不用于感测。通过围绕绳铲车100的外部包括多个传感器/灯模块175和灯模块180,可以激活传感器/灯模块175和灯模块180的子组以向绳铲车100外部的对象提供PDS已检测到所述对象的存在的针对性指示。炮孔钻机10和绳铲车100在本文中一般被称作工业机器10、100。
图3示出与图1和2的工业机器10、100相关联的控制器200。控制器200电气和/或通信地连接到工业机器10、100的多种模块或组件。举例来说,示出的控制器200连接到传感器/灯模块85、175、灯模块90、180、一个或多个指示器205、用户接口模块210、一个或多个第一致动装置(例如,马达、液压缸等)和第一驱动器215、一个或多个第二致动装置(例如,马达、液压缸等)和第二驱动器220、一个或多个第三致动装置(例如,马达、液压缸等)和第三驱动器225、数据存储或数据库230、电力供应模块235,以及一个或多个传感器240。第一致动装置和驱动器215、第二致动装置和驱动器220以及第三致动装置和驱动器225被配置成从控制器200接收控制信号以控制例如工业机器100的吊起、推挤和转向操作。控制器200包括硬件和软件的组合,所述组合被配置、可操作和/或被编程以尤其用于控制工业机器10、100的操作,产生控制信号集合以激活所述一个或多个指示器205(例如,液晶显示器[“LCD”]、一个或多个光源[例如,LED]等),监视工业机器10、100的操作等等。所述一个或多个传感器240尤其包括负载销、应变计、一个或多个倾角仪、龙门销、一个或多个电动机磁场模块(例如,测量例如电流、电压、功率等马达参数)、一个或多个绳索张力传感器、一个或多个解析器、雷达激光雷达、一个或多个相机、一个或多个红外传感器等。
控制器200包括对控制器200和/或工业机器10、100内的组件和模块提供电力、操作控制和保护的多个电学和电子组件。举例来说,控制器200尤其包括处理单元250(例如,微处理器、微控制器或另一合适的可编程装置)、存储器255、输入单元260和输出单元265。处理单元250尤其包括控制单元270、算术逻辑单元(“ALU”)275和多个寄存器280(示出为图3中的一组寄存器),且是使用已知计算机架构(例如,经修改的哈佛架构、冯诺伊曼体系架构等)实施的。处理单元250、存储器255、输入单元260和输出单元265以及连接到控制器200的各种模块由一个或多个控制和/或数据总线(例如,公用总线285)连接。出于说明性目的在图3中大体上示出控制总线和/或数据总线。用于各种模块和组件之间的互连和通信的一个或多个控制和/或数据总线的使用将是所属领域的技术人员鉴于本文所述的本发明而已知的。
存储器255是非暂时性计算机可读介质且包括例如程序存储区域和数据存储区域。程序存储区域和数据存储区域可包括不同类型的存储器的组合,例如只读存储器(“ROM”)、随机存取存储器(“RAM”)(例如,动态RAM[“DRAM”]、同步DRAM[“SDRAM”]等)、电可擦除可编程只读存储器(“EEPROM”)、快闪存储器、硬盘、SD卡,或其它合适的磁性、光学、物理或电子存储器装置。处理单元250连接到存储器255且执行软件指令,所述软件指令能够存储于存储器255的RAM(例如,在执行期间)、存储器255的ROM(例如,在一般永久基础上)或另一非暂时性计算机可读介质中,所述非暂时性计算机可读介质例如另一存储器或磁盘。工业机器10、100的实施方案中包含的软件可存储于控制器200的存储器255中。软件包括例如固件、一个或多个应用程序、程序数据、滤波器、规则、一个或多个程序模块和其它可执行指令。控制器200被配置成从存储器检索且执行与本文所描述的控制过程和方法有关的指令。在其它构造中,控制器200包括额外、较少或不同的组件。
电力供应模块235将标称AC或DC电压供应到控制器200或工业机器10、100的其它组件或模块。电力供应模块235是由诸如具有100V与240V AC之间的标称线电压和近似50-60Hz的频率的电源供电的。电力供应模块235还被配置成供应较低电压以操作控制器200或工业机器10、100内的电路和组件。在其它构造中,控制器200或工业机器10、100内的其它组件和模块是由一个或多个电池或电池组或另一独立于电网的电源(例如,发电机、太阳能面板等)供电的。
用户接口模块210用以控制或监视工业机器10、100。用户接口模块210包括实现对工业机器10、100的预期控制和监视水平所需的数字和模拟输入或输出装置的组合。举例来说,用户接口模块210包括显示器(例如,主要显示器、次要显示器等)和输入装置(例如触摸显示器)、多个旋钮、刻度盘、开关、按钮等。显示器是诸如液晶显示器(“LCD”)、发光二极管(“LED”)显示器、有机发光二极管(“OLED”)显示器、电致发光显示器(“ELD”)、表面传导电子发射显示器(“SED”)、场发射显示器(“FED”)、薄膜晶体管(“TFT”)LCD等。用户接口模块210还可被配置成实时或基本上实时显示与工业机器10、100相关联的条件或数据。举例来说,用户接口模块210被配置成显示测得的工业机器10、100的电特性、工业机器10、100的状态等。在一些实施方案中,与所述一个或多个指示器205(例如,LED、扬声器等)结合控制用户接口模块210以提供工业机器10、100的状态或条件的视觉或听觉指示(例如,从工业机器10、100的喇叭)。在一些实施方案中,工业机器10、100是不需要用户接口模块210的自主工业机器。在此类实施方案中,用户接口模块210可包括于工业机器10、100中作为备件或实现对工业机器10、100的监视。
控制器200被配置成实施接近度检测系统(“PDS”)或障碍物检测系统(“ODS”),该系统使用诸如传感器240来检测和分类接近工业机器10、100的对象。PDS和ODS在本文中可互换地使用。举例来说,PDS可使用雷达、激光雷达和红外传感器的组合来检测接近工业机器10、100的对象,且将对象分类为大对象(例如,拖车)或小对象(例如,人)。2014年7月1日发布且标题为“用于铲车的碰撞检测和减轻系统和方法”的第8,768,583号美国专利描述了可用以检测接近工业机器10、100的对象的PDS的实例,所述美国专利的整个内容特此以引用的方式并入本文中。
在控制器200已检测且分类接近工业机器10、100的对象之后,控制器200被配置成控制指示器205、传感器/灯模块85、175和/或灯模块180以向工业机器10、100外部的个人提供PDS已检测到他或她的存在的视觉指示。工业机器10、100中的个人将能够看见PDS的输出(例如,通过用户接口模块210),所述输出包含检测到的对象的方向、与对象的距离和风险严重度。然而,所述信息对于工业机器10、100外部的场外个人通常是不可用的。指示器205包括安装到工业机器10、100的外表面(例如,传感器/灯模块85、175、灯模块90、180等)的一个或多个光源(例如,LED),其向工业机器10、100外部的个人提供视觉指示。安装到工业机器10、100的外表面的所述一个或多个光源可以包括安装在工业机器10、100的底座20、110周围的一系列灯。光源提供诸如与PDS在其中检测到对象或人的特定区域相关的方向信息,其使工业机器10、100周围的不同区域(例如,左、右、前、后等)中的多个对象或人能够观察其相对于PDS的特定状态(例如,基于哪些灯被照亮)以及照明方式(例如,频闪速度、颜色、强度等)。在一些实施例中,当PDS检测到人或另一较小对象时,控制器200产生第一组控制信号以激活工业机器10、100上的较低(例如,下部)的灯(例如,传感器/灯模块85、175)。在此类实施例中,当PDS检测到拖车或另一较大对象时,控制器200被配置成产生第二组控制信号以激活工业机器10、100上的较高(例如,上部)的灯(例如,灯模块90、180)。在其它实施例中,当PDS检测到拖车或其他大对象时,控制器200被配置成产生第三组控制信号以激活工业机器10、100上较高和较低的灯(例如,传感器/灯模块85、175和灯模块90、180)。
光源是诸如高强度可编程频闪灯。频闪灯可以是任何类型的光源(例如,LED)且可产生任何理想的输出颜色(例如,绿色、黄色、红色等)。控制器200被配置成控制光源的频闪的频率光源的输出的量值或强度、光源的输出的颜色等等。控制器200基于诸如检测到的对象类型(例如,人车辆等)、对象与工业机器10、100的接近度等来控制光源的输出。在一些实施例中,随着对象变得越来越靠近工业机器,光源以越来越高的频率(例如,与接近度线性相关)频闪,其指示已检测到对象且正在跟踪对象与工业机器的接近度。在一些实施例中,当PDS检测到大对象(例如,拖车)时光源可以第一颜色(例如,蓝色)照亮,当PDS检测到小对象(例如,人)时光源以第二颜色(例如,红色)照亮。在一些实施例中,随着对象变得越来越靠近工业机器,光源以越来越高的强度(例如,与接近度线性相关)被激活,其指示已检测到对象且正在跟踪对象与工业机器的接近度。
图4示出用于向工业机器10、100外部的个人提供PDS已检测到他或她的存在的视觉指示的过程300。过程300从PDS检测对象(例如,车辆、人等)的存在(步骤305)开始。在已检测到对象之后,PDS被配置成将对象分类为诸如车辆或人(步骤310)。在PDS已在步骤310将对象分类之后,PDS确定一个或多个指示器控制技术(步骤315)。所述一个或多个指示器控制技术包含确定照亮的颜色、频闪的频率、照亮的强度等等。在步骤315之后,PDS确定或识别要控制哪些指示器或灯(步骤320)。确定要控制哪些指示器可包含随时间(例如,在检测到的对象或工业机器10、100从一个位置移动到另一位置时)改变被激活的指示器。随后,由控制器200将指示器控制为如使用PDS所确定(步骤325)。在一些实施例中,PDS和外部指示器的功能性可以通过让人在工业机器10、100周围行走来验证,该人以距工业机器10、100变化的距离行走以查看被照亮的灯是否跟随、灯是否以正确频率频闪、灯是否以正确颜色照亮等等。
图5-11示出可与图4的过程300结合使用的指示器的各种实施方案或布置。图5示出包括指示器阵列405和多个指示器410的实施方案400。指示器410布置成单行。图6示出包括指示器阵列505和多个指示器510的实施方案500。指示器510布置成双行。图7示出包括指示器阵列605和多个指示器610的实施方案600。指示器610布置成偏移双行。
图8示出包括指示器阵列705的实施方案700。指示器阵列705包括多个指示器715的分组710。指示器715布置成包括四个指示器的菱形配置。图9示出包括指示器阵列805的实施方案800。指示器阵列805包括多个指示器815的分组810。指示器815布置成包括六个指示器的蜂巢形配置。图10示出包括指示器阵列905的实施方案900。指示器阵列905包括多个指示器915的分组910。指示器915布置成包括十二个指示器的十字形配置。图11示出包括指示器阵列1005的实施方案1000。指示器阵列1005包括多个指示器1015的分组1010。指示器1015布置成包括十六个指示器的正方形配置。在指示器的各种实施方案中,指示器的分组可以包括一个到一百个之间的指示器。
图12A、12B和12C示出基于PDS对对象的检测对指示器的控制。图12A-12C示出包括指示器阵列1105和布置成单行的多个指示器1110的实施方案1100。指示器1110的子组1115被激活以提供例如检测到接近工业机器10、100的人的指示。在图12A中,指示器1110的子组1115以特定颜色且以特定强度被照亮。在被PDS检测到的对象或工业机器10、100移动时,被激活的指示器1110的子组1115可改变,如图12B中所图示。除改变被激活的指示器1110的子组1115之外,还可改变用于指示器1110的照亮的特定颜色和/或指示器1110的照亮的强度。如图12C中所图示,被激活的指示器1110的子组1115可随着由工业机器10、100的PDS检测到的对象继续移动而继续改变。用于指示器1110的照亮的特定颜色和/或指示器1110的照亮的强度也可继续改变。在一些实施例中,工业机器10、100包含可以提供正检测到的对象的类型(例如,人、小对象、拖车、大对象等)的视觉指示的一个或多个LED显示器。
因此,本文描述的实施例提供一种工业机器,其包括用于提供检测到的在工业机器外部且接近工业机器的对象的指示的一个或多个外部指示器。在所附权利要求书中阐述各种特征和优点。
- 包括外部安装的指示器的工业机器的接近度检测系统
- 一种六自由度工业机器误差检测系统