一种铁路道岔参数嵌入式机器视觉在线检测装置及检测方法
文献发布时间:2023-06-29 06:30:04
技术领域
本发明主要涉及到轨道交通视觉检测技术领域,特指一种铁路道岔参数嵌入式机器视觉在线检测装置及检测方法。
背景技术
目前,在轨道交通技术领域中,针对道岔几何位置的监测方式一般采用的是移动式测量,主要依靠人工定期检查或车载巡检。比如,依靠人工手持测量工具定期检测数字道尺、塞尺(例如铁路线NR/L2/TRK/001检测与维修方式),但这种测量方式效率低下、成本高以及可靠度低。车载巡检主要借助相机与线激光组合测量,例如Rusu等基于Network Rail标准提出了一种道岔激光检测小车用于快速的道岔轮廓检测;又如Zarembski等发明了一种全自动检测小车(ASIV)来实现道岔全自动检测;又如英国EURAILSCOUT公司研发一种道岔检测与测量车(SIM)配备8个相机和激光器组合单元,可检测道岔多项不同参数。这种测量方式相对于人工定期检测其自动化程度高、检测效率高,但其受制于天窗时间限制,不能及时检测道岔异常。目前,绝大部分的实践应用过程中,在道岔参数检测方面还停留于人工巡检的方式,而这种人工检测方法占用较大的铁路运营时间,降低了运营效率,且无法实现智能化、信息化的检测。
有从业者Wang C提出利用单目相机获取道岔图像,提取道岔尖轨与基本轨边界特征,根据像素差值与真实值之间的拟合函数,计算出道岔密贴测量值。
又有从业者张宾利提出基于机器视觉的双目结构光成像技术获取道岔的三维点云,但其成像过程中易受到环境光的干扰,其稳定性较差不适合户外场景。
又有从业者Ye J提出了一种基于线侧非侵入式视觉的监测方式,通过在尖轨上张贴标签并识别标签位置,并通过仿射配准计算出尖轨与基本轨的距离。
但是,针对现有技术铁路安全限高、尖轨运动范围和视场宽度等问题,上述所有的传统技术方案的监测方式均存在检测对象单一、精度低、装置限高、道岔边缘点难以捕捉等缺点,无法满足道岔关键参数在线全天候监测的基本需求。
又例如,中国专利申请CN112033283A,其公开了一种基于双目视觉成像系统的道岔测量方法及其测量装置,但是这个技术方案在实际使用之后发现其存在较大的问题:首先是双目相机对于检测物的标定存在较为复杂和精确不高的问题;其次是在对图像进行处理时,获得的图像精准性不够,处理效率不高。
发明内容
本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种结构简单、成本低、易于安装、具有自清洁功能的铁路道岔参数嵌入式机器视觉在线检测装置及检测方法。
为解决上述技术问题,本发明采用以下技术方案:
一种铁路道岔参数嵌入式机器视觉在线检测装置,其包括箱体、激光组件和相机组件,箱体的底部设有安装板,箱体的前侧设置有透明板,激光组件和相机组件安装于安装板上,并朝向透明板,透明板转动安装于箱体上,透明板的上侧设置有用于驱动透明板上侧向箱体外部打开的驱动组件,以及用于将透明板的上侧向箱体内部关闭的拉紧组件。
作为本发明装置的进一步改进:所述驱动组件包括驱动电机、凸轮和支架单元,所述凸轮位于驱动电机的输出端,且周侧与支架单元的一端相抵靠,所述支架单元的另一端与透明板相抵靠。
作为本发明装置的进一步改进:所述支架单元包括横梁杆、立柱和推动杆,所述横梁杆的侧面与凸轮相抵靠,横梁杆的一端与立柱的一端紧固相连,所述立柱的另一端与推动杆的一端相连,所述推动杆的另一端上设有腰形孔;所述透明板的上侧设有销钉,销钉位于腰形孔内。
作为本发明装置的进一步改进:所述拉紧组件包括弹簧,所述弹簧的一端安装于安装板上,另一端则与透明板的上部分相连。
作为本发明装置的进一步改进:所述安装板上设有多个安装孔,形成安装孔阵列;所述激光组件包括一字线激光器和短线激光器,所述一字线激光器和短线激光器均通过支柱插设于安装板上的安装孔上;所述相机组件包括左相机和右相机,左相机和右相机形成双目相机。
本发明进一步提供一种铁路道岔参数嵌入式机器视觉在线检测方法,用来结合上述装置具体实施检测作业;其包括:
步骤S1:标定;
步骤S2:向铁轨投射线线结构光作为标志,利用双目相机先后采集一组有激光线和无激光线的图像;
步骤S3:对激光图像进行预处理;
步骤S4:利用连通区域的划分将激光段进行划分和标记,进而转换成特征点的识别;
步骤S5:利用左右相机的特征位置关系完成双目视觉系统的立体匹配;
步骤S6:直接利用激光三角原理,计算出若干个监测特征的三维坐标值;
步骤S7:利用步骤S6中获取三维特征点的坐标值,转化完成道岔相关参数的测量,最终将测量结果上传至铁路系统。
作为本发明方法的进一步改进:所述步骤S3的流程包括:
步骤S301:设定激光条原始处理图像区域,基于自适应双阈值分割激光条纹;
步骤S302:对激光条纹进行滑动卷积处理;
步骤S303:获得激光条纹中心的亚像素坐标。
作为本发明方法的进一步改进:所述步骤S301的流程包括:
步骤S3011:裁剪一定尺寸作为激光条原始处理图像区域ROI,用以提高运行速度;
步骤S3012:采用双边滤波函数对其处理,保留激光条纹边缘信息;
步骤S3013:利用几何约束去除孤立噪声点。
步骤S3014:统计处理后的图像灰度直方图,确定图像灰度值阈值;
步骤S3015:基于自适应双阈值分割激光条纹。
作为本发明方法的进一步改进:在步骤S302中,采用自适应方向模板的条纹细化方法,设计四个不同方向、大小模板T,记为T
作为本发明方法的进一步改进:在步骤S303中,获得激光条纹中心的亚像素坐标,采用基于steger算法获得光条法线方向F=(n
与现有技术相比,本发明的优点就在于:
1、本发明的铁路道岔参数嵌入式机器视觉在线检测装置及检测方法,为一种激光打标嵌入式机器视觉原位检测装置。该装置采用扁平式机械结构设计,适合铁路受限空间安装;考虑行车振动问题,引入自标定相机外参修正算法。同时,为克服环境光干扰和轨道复杂表面特性难题,提出了基于光条法向的高斯加权灰度重心法对激光条纹中心亚像素坐标进行提取,提高了实际运行环境下的道岔参数检测精度和稳定性。
2、本发明的铁路道岔参数嵌入式机器视觉在线检测装置及检测方法,可避免振动因素对双目视觉系统外参改变,提高测量的稳定性与鲁棒性。本发明采用双目自标定方法,同时本发明针对铁轨露天环境下,克服光条漫反射等因素干扰,基于光条法向的高斯加权灰度重心法对激光条纹中心亚像素坐标进行提取。
3、本发明的铁路道岔参数嵌入式机器视觉在线检测装置及检测方法,基于嵌入式tx2平台开发,适合现场工作环境。本发明利用双目视觉成像系统,可完成道岔参数的三维检测,为了特征点的准确定位,采用线激光对道岔进行标记,可提高系统运行速度与测量精度。本发明采用近红外激光激光波段,减少对铁路其他信号的干扰,保证铁路系统安全运行。
4、本发明的铁路道岔参数嵌入式机器视觉在线检测装置及检测方法,本固定安装于道岔处,可设置系统检测频率,完成道岔参数的实时检测,减少人工检测成本以及误检、漏检等弊端。此外,本发明结构设计合理,可定期启动自动除尘、防水等功能,减少维护成本,延长设备使用寿命。
附图说明
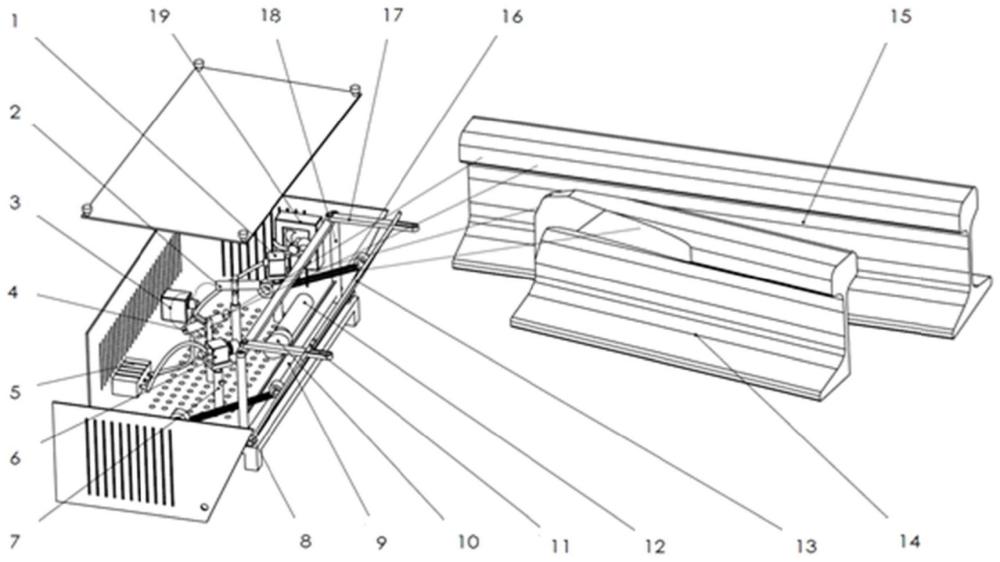
图1是本发明装置在具体应用实例中的结构原理示意图。
图2是本发明方法的流程示意图。
图3是本发明在具体应用实例中自标定的示意图。
图4是本发明在具体应用实例中自标定控制点重建的示意图。
图5是本发明在具体应用实例中控制点提取的示意图。
图6是本发明在具体应用实例中光条缺陷的示意图。
图7是本发明在具体应用实例光条提取流程的示意图。
图8是本发明在具体应用实例光条中心提取后的效果示意图。
图例说明:
1、左相机;2、一字线激光器;3、直流电源;4、短线激光器;5、嵌入式处理器;6、右相机;7、支柱;8、合页;9、横梁杆;10、凸轮;11、销钉;12、驱动电机;13、透明板;14、尖轨;15、基本轨;16、弹簧;17、推动杆;18、立柱;19、风机。
具体实施方式
以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
在本申请的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本申请的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本申请中,除非另有明确的规定和限定,术语“装配”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
如图1所示,本发明的铁路道岔参数嵌入式机器视觉在线检测装置,包括箱体、激光组件和相机组件,箱体的底部设有安装板,箱体的前侧设置有透明板13,激光组件和相机组件安装于安装板上,并朝向透明板13,透明板13的下侧通过合页8等转动件转动安装于箱体上,透明板13的上侧设置有用于驱动透明板13上侧向箱体外部打开的驱动组件,以及用于将透明板13的上侧向箱体内部关闭的拉紧组件。在具体使用时,通过驱动组件与拉紧组件之间的配合,能够使得透明板13的上端向外打开以及向内关闭,即使得透明板13绕其下侧转动,从而将透明板13上的灰尘抖掉,防止透明板13上灰尘对激光组件的激光以及相机组件的成像产生影响,保障检测装置整体的可靠运行。
在具体应用实例中,驱动组件包括驱动电机12、凸轮10和支架单元,凸轮10位于驱动电机12的输出端,且周侧与支架单元的一端相抵靠,支架单元的另一端与透明板13相抵靠;其中支架单元包括横梁杆9、立柱18和推动杆17,横梁杆9的侧面与凸轮10相抵靠,横梁杆9的一端与立柱18的一端紧固相连,立柱18的另一端与推动杆17的一端相连,推动杆17的另一端上设有腰形孔,透明板13的上侧设有销钉11,销钉11位于腰形孔内。在需要进行除尘时,驱动电机12带动凸轮10转动,周期性地推动支架单元中的横梁杆9向箱体外侧移动,经立柱18将推动杆17同步向箱体外部推动,从而带动透明板13上的销钉11向外移动,即使得透明板13绕其下端转动而向外打开,进行抖灰动作;在凸轮10转动一定角度后,横梁杆9往外移动至最大位移,此时透明板13则向外打开最大角度,此时拉紧组件则将透明板13往回拉,实现关门动作。
在具体应用实例中,拉紧组件包括弹簧16,弹簧16的一端安装于安装板上,另一端则与透明板13的上部分相连,结构简单、易于实现;通过弹簧16将透明板13拉紧,保证箱体的整体密封性和防水性,保障内部环境的洁净性,防止铁路现场灰尘对相机组件上的镜头的污染而影响成像,使得各部件能够正常工作。
在具体应用实例中,安装板上设有多个安装孔,形成安装孔阵列;其中激光组件包括一字线激光器2和短线激光器4,一字线激光器2和短线激光器4均通过支柱7插设于安装板上的安装孔上;相机组件包括左相机1和右相机6,左相机1和右相机6形成双目相机;左相机1和右相机6同样通过支柱7插设于安装板上的安装孔上,通过移动支柱7在安装板上安装孔的位置,当道岔整体位于相机视野中央范围时固定。在进行检测时,使用短线激光器4和一字线激光器2配合实现道岔特征定位;其中短线激光器4发射的激光线长度较短,向道岔基本轨15表面投射短线激光,用来定位位置固定的基本轨15平面;由于道岔进行换轨时尖轨14处于运动状态位置不固定,使用一字线激光器2向道岔尖轨14投射一字线激光,使激光线在尖轨14尖端位置发生断裂,对尖轨14尖端进行定位。左相机1和右相机6同时采集道岔表面的各线激光图像,将发送到箱体内的嵌入式处理器5,嵌入式处理器5接收采集到的左右图像,根据双目视觉方法(常规方法)计算道岔密贴度、斥离度和爬行量。上述通过在安装板上设置有多个安装孔,能够实现各相机和激光器在不同位置的调整布局,由于道岔尖轨14变化范围较广,通过调节相机和激光器的安装位置实现装置能够检测道岔尖轨14范围内的全部变化。
在具体应用实例中,箱体由安装板、安装板、顶板、透明板13以及多块侧板围合而成,在其中一块侧板上设有通孔,通孔上安装有风机19,能够实现箱体内部的除尘以及散热,箱体内设有直流电源3,用于为各激光器提供电源;其中透明板13为石英玻璃板等。上述箱体的整体结构简单、体积小且扁平化,能够满足现场埋装与测量需求,同时兼顾防尘、防水和抗污染等环境影响。
如图2-图7所示,本发明进一步提供一种铁路道岔参数嵌入式机器视觉在线检测方法,其为一种基于双目视觉成像系统和激光投射线段作为道岔测量标志的方案;本发明方法的流程包括:
步骤S1:标定;
为了提高设备使用的简便性,预先对设备进行内外参数的标定。
具体而言,本发明基于张氏标定法离线获得左右相机内部参数。同时,根据自标定方法获得相机外参。上述自标定方法可有效矫正外参,对于实际运用过程正具有重要的意义。
步骤S2:向铁轨投射线线结构光作为标志,利用双目相机先后采集一组有激光线和无激光线的图像;
由于基本轨与尖轨上并无明显的特征,为了更好地获取理想的精度要求,因此本发明创新性地向铁轨投射线线结构光作为标志,双目相机先后采集一组有激光线和无激光线的图像。
本发明的此步骤是用来提供纹理特征,从而可有效地解决道岔在后续立体匹配步骤中对应点的问题,进而提高运行系统的速度和测量精度,这也是现有技术中未曾采用的技术手段。
步骤S3:对激光图像进行预处理;
在该步骤过程中,对激光图像进行预处理是为了有效地去除噪声点和背景光干扰。
步骤S4:利用连通区域的划分将激光段进行划分和标记,进而转换成特征点的识别;
这是由于尖轨位置的不断切换,投射的线激光在图像上分成两段或者是三段;因此,本发明创新性的利用连通区域的划分将激光段进行划分和标记,进而转换成特征点的识别。该步骤对于监测特征点的定位必不可少。
步骤S5:利用左右相机的特征位置关系完成双目视觉系统的立体匹配;
本发明在这个立体匹配的过程中,不需对全局进行匹配,而是利用监测特征进行立体匹配。
正是通过本发明创新性的使用这个方法,才能够减少匹配点,提高系统运行速度,获得更好的立体匹配效果。
步骤S6:直接利用激光三角原理,计算出若干个监测特征(如三个)的三维坐标值;
步骤S7:利用步骤S6中获取三维特征点的坐标值,转化完成道岔相关参数的测量,最终将测量结果上传至铁路系统。
在步骤S7的基础上,进一步,本发明还可以基于步骤S7的结果建立铁路智能系统网络,用以实现实时检测、智能报警等功能。
作为较佳实施例,所述步骤S3的具体流程可以包括:
步骤S301:设定激光条原始处理图像区域,基于自适应双阈值分割激光条纹;
步骤S302:对激光条纹进行滑动卷积处理;
步骤S303:获得激光条纹中心的亚像素坐标。
作为优选实例,进一步,所述步骤S301的流程包括:
步骤S3011:裁剪一定尺寸(如1000*500)作为激光条原始处理图像区域(ROI),用以提高运行速度;
步骤S3012:采用双边滤波函数对其处理,这样就可较好地保留激光条纹边缘信息;
步骤S3013:利用几何约束去除孤立噪声点。
步骤S3014:统计处理后的图像灰度直方图,确定图像灰度值阈值;
步骤S3015:基于自适应双阈值分割激光条纹。
作为优选实例,在步骤S302中,本发明采用自适应方向模板的条纹细化方法,设计四个不同方向的9*9大小模板T(记为T
作为优选实例,在步骤S303中,为了进一步获得激光条纹中心的亚像素坐标,本发明创新性的基于steger算法获得光条法线方向F=(n
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
- 一种双隐蔽探针式粮仓用粮食多参数RF在线检测装置及检测方法
- 一种全图像铁路道岔在线集成检测装置及方法
- 一种嵌入式高速在线机器视觉检测方法及装置