一种UWB定位和卫星定位双融合的温室内外定位系统及方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明属于定位技术领域,具体涉及一种UWB定位和卫星定位双融合的温室内外定位系统及方法。
背景技术
随着传感器技术、5G移动通信技术和人工智能技术的快速发展,加快了农机设备由人工操作向自动化操作转变的进程。传感器技术填补了农机设备的感官系统的缺失的问题,移动通信技术为农机设备增加了语言沟通能力,而人工智能技术无疑成为了农机设备的大脑,协调各个感官系统和语言系统,实现农机设备的智能化。然而,农机设备动起来,搞清楚“我在哪”的定位技术成为了农机设备移动作业的关键技术。只有知道了“我在哪”,才能实现后续的“自主走”的问题。
现有的室内定位技术中,对于基于超声波方法的定位技术,声波信号受到密集型、高秆作物的反射,信号衰减较为严重,定位精度下降严重;而基于红外线方法的定位技术,IR信号易受日光的干扰,面对透明温室的复杂光环境,甚至无法完成定位;对于蓝牙技术目前主要采用的小范围室内定位,距离增大,信号衰减严重,且易受到环境噪声影响导致稳定性较差;对于射频识别定位方式,利用无线电读写方式获取位置信息,在短时间获得较小误差定位精度,但定位范围小、国际化标准不够完善;对于无线高保真定位,通过经验测试数据和传播模型融合定位,精度较好,但是定位信号消耗的能量较高;对于Zigbee技术定位而言,功耗低,但是传输距离有限;而UWB定位技术以其穿透力强、功耗低、受多径效应的影响小、安全系数高、系统复杂度低与定位精度高等特点,可以有效解决温室内作物引起的多径和遮挡的影响。针对UWB的TOA测距方法对环境的敏感度极高,温室环境中微小的变化会引起测量数据的快速抖动,影响UWB测量的精度,针对UWB抖动误差提出一种有效减小抖动误差的温室内的定位方法。
目前温室内大部分的高精度定位系统,仅对单一的定位场景进行定位,但是对于有室内外切换需求的作业模式,定位系统无法充分发挥其作用。针对这一情况,提出了一种解决室内外兼容问题的室内外定位转换方法。
发明内容
针对上述技术问题,本发明公开了一种基于UWB的温室内外融合的定位系统及定位方法,利用UWB技术和改进的三边定位算法,首先建立温室内定位坐标系,并对室内定位算法进行优化,获得较准确的定位坐标,实现农机移动设备在温室内的自主导航作业;通过卫星导航定位模块提供温室的卫星导航数据信息,将温室内坐标系和温室外GS84坐标系进行数据的融合,实现室内外的坐标系格式统一、室内外定位的自主切换和室内外定位系统的兼容。本发明为农机移动设备的作业提供高精度定位,解决温室内复杂植株环境造成的非视距定位误差波动大的问题,同时解决了室内外定位无法兼容的问题,提高了设施农业装备智能化作业水平,提高生产率。
本发明通过以下的技术方案实现:一种UWB定位和卫星定位双融合的温室内外定位系统,包括农机移动终端、卫星导航定位模块、UWB定位基站、室内激光测距模块、UWB基站移动平台和室内外场景转换检测模块;
所述UWB基站移动平台安装在温室内;所述UWB基站模块放置于UWB基站移动平台上,能够在UWB基站移动平台上滑动,用于发送和接收UWB数据信号;所述农机移动终端包括UWB室内定位标签和农机设备,UWB室内定位标签安装在农机设备上,用于获取标签与基站的距离信息;所述卫星导航定位模块至少有两个,一个安装在温室上部,用于获取温室卫星坐标的数据信息,一个安装在农机移动终端上,用于农机设备在温室外的定位;所述室内外场景转换检测模块安装在温室大门处,用于检测农机设备是否在温室内和室外切换作业场景;所述室内激光测距模块安装在UWB基站移动平台上,室内激光测距模块用于测量其与UWB定位基站的移动量,确定基站坐标系和温室坐标系的相对位置关系;
所述农机移动终端、卫星导航定位模块、UWB定位基站、室内激光测距模块和室内外场景转换检测模块分别与农机设备的控制单元连接。
上述方案中,所述UWB基站模块包括基站一、基站二、基站三和基站四;所述基站一、基站二、基站三和基站四分别安装在温室内东南西北的位置;所述UWB基站移动平台包括两根平行布置的导轨;基站一和基站四位于其中一根导轨上,基站二和基站三位于另一根导轨上;所述基站一、基站二、基站三和基站四构成矩形有效定位域,四个基站与农机设备的定位标签通过无线连接,将测得的四个基站到农机设备标签的距离信息并传输至定位标签再传送至农机设备的控制单元。
上述方案中,所述室内外场景转换检测模块为传感器。
一种根据所述UWB定位和卫星定位双融合的温室内外定位系统的定位方法,包括以下步骤:
建立温室内定位坐标系,并对室内定位算法进行优化,获得优化后的温室内定位坐标,实现农机移动设备在温室内的自主导航作业;通过卫星导航定位模块提供温室的卫星导航数据信息,将温室内定位坐标系和温室外卫星定位系统GS84坐标系进行数据的融合,实现室内外的坐标系格式统一、室内外定位的自主切换和室内外定位系统的兼容。
上述方案中,包括以下步骤:
步骤一:通过所述农机设备选择初始化作业场景,确定是室内定位模式还是室外定位模式;
步骤二:当作业场景是室内环境,选择室内定位模式通过所述UWB定位基站获取农机设备在温室内的初始位置,检测农机设备是否换垄作业,若偏离有效定位工作区域,农机设备控制UWB定位基站在UWB基站移动平台同步移动,调整有效定位工作区域,从而修正UWB定位基站测得的距离误差,建立基站坐标系,测量基站偏移量d,建立温室坐标系;
步骤三:通过所述UWB定位基站获取农机设备在温室内的定位数据;
步骤四:利用优化的室内定位算法对步骤三获取的室内定位数据进行处理,获得农机设备的在温室内的定位坐标;
步骤五:控制农机设备移动作业;
步骤六:所述室内外场景转换检测模块检测农机设备作业场景是否切换;
步骤七:当检测到室内环境,跳转到步骤三,进行后续操作,当检测到室外环境,进行步骤八;
步骤八:进行室内外定位模式转换:通过卫星导航定位模块获取温室卫星导航坐标(B
跳转到步骤五,继续执行。
上述方案中,所述步骤二中温室坐标系o′x′y′z′通过以下步骤获得:
建立基站坐标系oxyz,以基站一为坐标原点,东西走向的基站一和基站四所在的直线为x轴,南北走向的基站一和基站二所在的直线为y轴,以垂直xoy平面为z轴;
所述激光测距模块测量基站一的偏移d,建立温室坐标系o′x′y′z′,测得基站一相对温室坐标系原点的偏移d,则有
上述方案中,所述优化的室内定位算法具体如下:
根据空间三边定位原理,求解T
利用空间坐标加权平均方法,用四面体ABCD、四面体A′B′C′D′和四面体A″B″C″D″对定位位置进行估算,求出三组估算解(x
利用标准差加权值作为坐标解的修正因子定位坐标进行修正,求ABCD四点的x坐标的标准差σ
y
z
修正后农机设备的在温室内的定位坐标即农机设备上标签位置坐标为x,y,z,计算公式如下
上述方案中,所述步骤八进行室内外定位模式转换具体为:
获取温室卫星导航坐标(B
其中,N为卯酉圈的半径,
分别求出温室坐标系中三个坐标轴向量在地心笛卡尔坐标系中的表示,其中z′轴的轴向量表示为(x″
建立修正的温室坐标系,将温室坐标用地心笛卡尔坐标表示:
进行GS84坐标系(B,L,H)转换,将修正后的温室坐标系转换成GS84坐标系进行表示,转换关系为:
与现有技术相比,本发明的有益效果是:本发明利用UWB技术和改进的三边定位算法,首先建立温室内定位坐标系,并对室内定位算法进行优化,获得较准确的定位坐标,实现农机移动设备在温室内的自主导航作业;通过卫星导航定位模块提供温室的卫星导航数据信息,将温室内坐标系和温室外GS84坐标系进行数据的融合,实现室内外的坐标系格式统一、室内外定位的自主切换和室内外定位系统的兼容。本发明为农机移动设备的作业提供高精度定位,提高了设施农业装备智能化作业水平,提高生产率。本发明解决了温室内人行通道设置相对狭小,作物种植密度较大,农机设备作业的范围受到了严重的限制情况下,农机设备无法定位和定位误差较大的问题;同时,解决了许多定位系统室内外不兼容,不能同时使用,是一种室内外全覆盖的定位系统。
附图说明
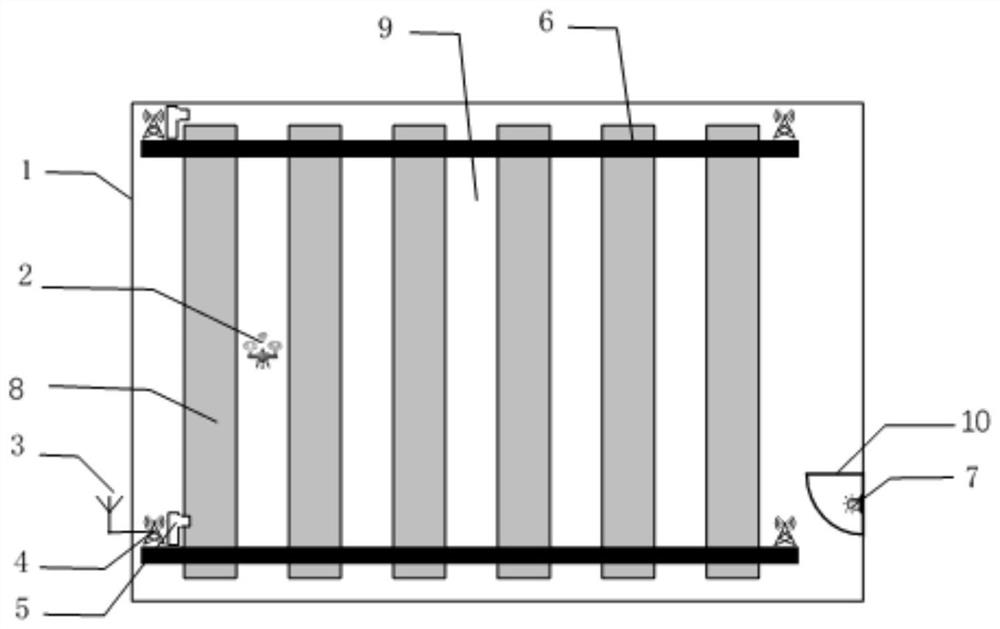
图1是本发明一实施方式的室内外融合定位系统的二维结构框图;
图2是本发明一实施方式的温室内外定位组网框图;
图3是本发明一实施方式的UWB室内和卫星导航室外融合定位系统的流程图;
图4是本发明一实施方式的室内定位启动子流程图;
图5是本发明一实施方式的室内外定位转换子流程图;
图6本发明一实施方式的温室坐标系和地心笛卡尔坐标系位置关系。
其中,1.温室;2.农机移动终端;3.卫星导航定位模块;4.UWB定位基站;5.室内激光测距模块;6.UWB基站移动平台;7.室内外场景转换检测模块;8.作物种植槽;9.过道;10温室大门。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“轴向”、“径向”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
如图1所示为本发明所述UWB定位和卫星定位双融合的温室内外定位系统,所述UWB定位和卫星定位双融合的温室内外定位系统包括温室1、农机移动终端2、卫星导航定位模块3、UWB定位基站4、室内激光测距模块5、UWB基站移动平台6、以及室内外场景转换检测模块7、作物种植槽8、过道9和温室大门10。所述UWB基站移动平台6安装在温室1内;所述UWB基站模块4放置于UWB基站移动平台6上,能够在UWB基站移动平台6上滑动,用于发送和接收UWB数据信号;所述农机移动终端2包括UWB室内定位标签和农机设备,UWB室内定位标签安装在农机设备上,用于获取标签与基站的距离信息;所述卫星导航定位模块3至少有两个,一个安装在温室1上部,用于获取温室1卫星坐标的数据信息,一个安装在农机移动终端2上,用于农机设备在温室1外的定位;所述室内外场景转换检测模块7安装在温室大门10处,用于检测农机设备是否在温室内和室外切换作业场景;所述室内激光测距模块5安装在UWB基站移动平台6一端,室内激光测距模块5用于测量与位于同一UWB基站移动平台6与其最近的UWB定位基站4的移动量,确定基站坐标系和温室坐标系的相对位置关系;所述农机移动终端2、卫星导航定位模块3、UWB定位基站4、室内激光测距模块5和室内外场景转换检测模块7分别与农机设备的控制单元连接。其中,所述农机移动终端2、卫星导航定位模块3、UWB定位基站4、室内激光测距模块5和室内外场景转换检测模块7建立定位的无线通信网络。
如图2所示,为所述UWB定位和卫星定位双融合的温室内外定位系统组网,包括四个UWB定位基站4、一个定位标签、一个卫星导航定位模块3和一个场景转换检测模块7。所述UWB基站模块4包括四个基站:基站一、基站二、基站三和基站四;所述基站一、基站二、基站三和基站四分别安装在温室1内东南西北的位置;所述UWB基站移动平台6包括两根平行布置的导轨;基站一和基站四位于其中一根导轨上,基站二和基站三位于另一根导轨上。基站一、基站二、基站三和基站四放置在UWB基站移动平台6上,构成矩形有效定位域,四个基站与农机设备定位标签通过无线连接,将测得的四个基站到标签的距离信息传输至定位标签汇总再传送至农机设备的控制单元。
UWB室内定位标签放置在农机移动终端2上面,直接与农机移动终端的控制单元MCU连接,将接收到定位标签到各个基站的距离信息传输给农机移动终端MCU中。
优选的,所述卫星导航定位模块3放置在温室1顶端,有效提供温室1左下角的卫星导航的位置信息,卫星导航定位模块3与基站一相连,将温室1的位置信息传输到基站一,基站一将温室卫星导航的位置信息传输到农机移动终端的MCU中;
所述室内外场景转换检测模块7通过无线方式连接农机移动终端的MCU,传输农机移动设备室内外状态信息,用于室内外定位模式的切换。
所述室内激光测距模块5固定在UWB基站移动平台6一端,获取室内激光测距模块5到四个基站的距离数据,具体的,所述室内激光测距模块5分别安装在两个UWB基站移动平台6上,室内激光测距模块5用于测量同一UWB基站移动平台6上UWB定位基站4分别与其的移动量,一个室内激光测距模块5包括两组激光测距传感器,例如,一组激光测距传感器测量同一UWB基站移动平台6上基站一的移动量,另一组激光测距传感器测量测量基站四的移动量,相同的,另一个室内激光测距模块5的一组激光测距传感器测量同一UWB基站移动平台6上基站二的移动量,另一组激光测距传感器测量测量基站三的移动量,确定基站坐标系和温室坐标系的相对位置关系;传输到农机移动终端的MCU,建立基站坐标系和温室坐标系的相对位置关系,控制基站的移动。
系统在工作的过程中,主要通过温室内的四个基站为农机设备提供室内定位数据,实现农机设备的自主作业。通过调节UWB基站移动平台6来适应农机移动设备,保持设备处于室内的最优定位区域,提高农机定位的精度,所述室内外场景转换检测模块7为传感器,通过室内外场景转换检测模块7室内外场景转换检测传感器,检测到农机移动设备是否切换作业场景,选择室内外定位模式。其中UWB基站移动平台6在温室两侧横跨温室整个宽度。如图3、4、5和6所示,所述的UWB定位和卫星定位双融合的温室内外定位系统的定位方法,具体包括以下步骤:
步骤一:农机设备室内外场景检测,确定室内定位和室内定位模式;
步骤二:当检测到室内环境,初始化基站定位网络,对初始工作环境下,各个基站的测距值进行线性拟合,减小环境引起的数据偏移;
检测农机移动设备是否换垄作业,偏离有效定位工作区域;
若偏离有效工作区域,同步移动基站位置,修正基站测得的距离误差;
建立基站坐标系oxyz,以基站一为坐标原点,东西走向的基站一和基站四所在的直线为x轴,南北走向的基站一和基站二所在的直线为y轴,以垂直xoy平面为z轴;
激光测距模块测量基站的偏移d,建立温室坐标系o′x′y′z′,测得基站的相对温室的偏移d,则有
步骤三:获取室内定位数据;
步骤四:利用优化的室内定位算法对步骤三获取的室内定位数据进行处理,获得农机设备的在温室1内的定位坐标;对室内定位算法优化,本发明提出了一种空间位置坐标标准差加权修正的室内定位优化算法,统计学原理引入两个状态解的交集四面体,并对三组四面体顶点坐标进行标准差求解,利用标准差作为三个四面体在定位求解的权值大小,提高了原有的定位精度,减小了系统的数据抖动误差,温室室内的定位优化方法具体如下:
根据空间三边定位原理,求解T
利用空间坐标加权平均方法,用四面体ABCD、四面体A′B′C′D′和四面体A″B″C″D″对定位位置进行估算,求出三组估算解(x
利用标准差加权值作为坐标解的修正因子定位坐标进行修正,分别求ABCD四点的x坐标的标准差σ
求解出y
求解出z
在修正的空间三边定位下,求解的标签位置坐标(x,y,z)计算公式如下
步骤五:控制农机移动设备移动作业;
步骤六:进行农机移动设备室内外场景检测;
步骤七:当检测到室内环境,跳转到步骤三,进行后续操作,当检测到室外环境,进行步骤八;
步骤八:进行室内外定位模式转换:
获取温室卫星导航坐标(B
其中,N为卯酉圈的半径,
分别求出温室坐标系中三个坐标轴向量在地心笛卡尔坐标系中的表示,如图6所示,其中z′轴的轴向量可以表示为(x″
建立修正的温室坐标系,将温室坐标,用地心笛卡尔坐标表示
进行GS84坐标系((B,L,H)转换,将修正后的温室坐标系转换成GS84坐标系进行表示,转换关系为:
转换卫星导航定位的数据格式,卫星导航定位模块中的GSA和GSV信息通过温室上方的卫星导航模块提供,GGA和RMC中的经纬度和高度信息由卫星导航坐标系(B,L,H)提供,VTG速度信息通过农机设备上的测速及位姿传感器提供,卫星导航定位的数据格式的统一,解决室内UWB定位和室外卫星定位不兼容的问题,实现室内外定位的融合;
跳转到步骤五,继续执行。
应当理解,虽然本说明书是按照各个实施例描述的,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施例的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施例或变更均应包含在本发明的保护范围之内。
- 一种UWB定位和卫星定位双融合的温室内外定位系统及方法
- 一种基于图像识别与UWB定位融合的输电线路巡检无人机精确定位系统及方法