一种基于毫米波雷达的人体感知方法及其系统
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及雷达的人体感知技术领域,具体为一种基于毫米波雷达的人体 感知方法及其系统。
背景技术
随着雷达设备成本降低和雷达技术的迅速发展,研究人员可以利用雷达信 号来感知和识别环境的变化,进而推动以雷达为核心技术的多个领域的研究进 展。雷达相比光学设备优势主要体现在以下方面:雷达不能记录人员的面部信 息,可以在监控中更好地保护个人隐私;雷达可探测距离较远,当目标位置距 离雷达较远时,也可以对目标进行探测;雷达可以全天候工作,当探测环境比 较复杂时,雷达系统不受影响,而摄像头设备等光学设备则无法在夜晚进行探 测;雷达可以实现非接触式识别,检测对象不需要携带任何可穿戴设备如手环、 手表等,能够减少消费者的反感程度。
但是在现有技术中,不能够对雷达信号波的差频信号进行检测,从而导致 人体感知的准确性能降低。
发明内容
本发明的目的就在于提出一种基于毫米波雷达的人体感知方法及其系统, 雷达管理平台接收到信号波X(t)与发射信号波X'(t)后,生成准确分析信 号并将准确分析信号发送至准确分析单元,准确分析单元接收到准确分析信号 后,对信号波与反射信号波的差频信号进行计算,获取到信号波发射时刻的瞬 时相位,并将瞬时相位标记为m瞬(t),随后将发射信号波与接收信号波进行 混频处理;将时间延时K代入公式计算获取到差频信号的瞬时相位,并将差频信 号的瞬时相位为M瞬(t),将时间延时K的计算式代入计算,通过M瞬(t)的计 算式对信号波的载波频率、调频带宽以及初始相位依次进行赋值处理,将差频 标记为m,通过载波频率、调频带宽以及初始相位可代入计算获取到差频信号, 随后将差频信号发送至雷达管理平台;对雷达信号波的差频信号进行检测,提 高人体感知的准确性能,从而提高了工作效率,大大减少了误差。
本发明的目的可以通过以下技术方案实现:
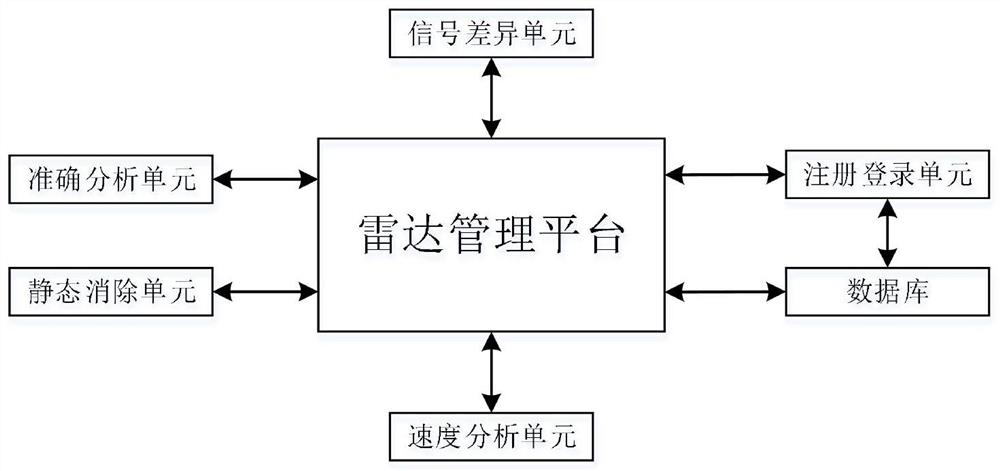
一种基于毫米波雷达的人体感知系统,包括雷达管理平台、信号差异单元、 准确分析单元、静态消除单元、速度分析单元、注册登录单元以及数据库;
所述雷达管理平台接收到雷达使用信号,控制雷达进行工作,雷达通过若 干个电线发射出信号波,随后雷达管理平台生成信号差异检测信号,并将信号 差异检测信号发送至信号差异单元,所述信号差异单元接收到信号差异检测信 号后,对雷达发生的信号波进行检测,具体检测过程如下:
步骤S1:获取到信号波的载波频率、调频带宽以及调频周期,并将信号波 的载波频率、调频带宽以及调频周期分别标记为PL、DK以及ZQ;
步骤S2:将信号的初始相位标记为CS,通过代入计算获取到信号波的计算 式,即计算式为
步骤S3:信号波在发射的同时记录当前时刻,并标记为发射时刻,信号波 在接触到人体后记录当前时刻,并标记为接收时刻,通过接收时刻与发射时刻 的比较获取到信号波发射时长p,随后获取到信号波发射时长内的信号波发射距 离,并将信号波的发射距离标记为JL,信号波接触人体后进行反射,即信号波 的传播距离为2JL,随后通过公式获取到雷达接收信号波与发射信号波存在的时 间延时K,即
步骤S4:通过代入计算获取到发射信号波的计算式,即计算式为
进一步地,所述雷达管理平台接收到信号波X(t)与发射信号波X'(t) 后,生成准确分析信号并将准确分析信号发送至准确分析单元,准确分析单元 接收到准确分析信号后,对信号波与反射信号波的差频信号进行计算,具体差 频信号的计算过程如下:
步骤SS1:获取到信号波发射时刻的瞬时相位,并将瞬时相位标记为m瞬(t), 即
步骤SS2:将时间延时K代入公式计算获取到差频信号的瞬时相位,并将差 频信号的瞬时相位为M瞬(t):
即
步骤SS3:通过M瞬(t)的计算式对信号波的载波频率、调频带宽以及初 始相位依次进行赋值处理,将差频标记为m,即载波频率为
步骤SS4:通过载波频率、调频带宽以及初始相位可代入计算获取到差频信 号,即差频信号为
步骤SS5:雷达管理平台接收到差频信号后,将差频信号X差(t)与差频 信号的阈值进行比较:
若差频信号X差(t)≥差频信号的阈值,则判定雷达检测有误差,生成误 差信号并将误差信号发送至静态消除单元;
若差频信号X差(t)<差频信号的阈值,则判定雷达检测无误差,生成无 误差信号并将无误差信号发送至用户的手机终端。
进一步地,所述静态消除单元接收到误差信号后,对雷达发射信号波的静 态干扰数据进行分析,从而对信号波进行静态消除,信号波的静态干扰数据包 括数量数据、噪声数据以及磁场数据,数量数据为信号波在传送途中反射路径 数量,噪声数据为信号波在传送途中周边环境的分贝值,磁场数据为信号波在 传送途中周边环境的磁场强度,具体分析检测过程如下:
步骤T1:获取到信号波在传送途中反射路径数量,并将信号波在传送途中 反射路径数量标记为FSL;
步骤T2:获取到信号波在传送途中周边环境的分贝值,并将信号波在传送 途中周边环境的分贝值标记为FBZ;
步骤T3:获取到信号波在传送途中周边环境的磁场强度,并将信号波在传 送途中周边环境的磁场强度标记为ZQD;
步骤T4:通过公式
步骤T5:将静态干扰清除系数JC与静态干扰清除系数阈值进行比较:
若静态干扰清除系数JC≥静态干扰清除系数阈值,则判定信号波需要静态 干扰消除,生成静态消除信号并将静态消除信号发送至雷达管理平台,雷达管 理平台接收到静态消除信号后,对信号波的相邻帧进行减法运算,将信号波的 静态干扰进行消除;
若静态干扰清除系数JC<静态干扰清除系数阈值,则判定信号波不需要静 态干扰消除,生成无干扰信号并将无干扰信号发送至雷达管理平台,雷达管理 平台接收到无干扰信号后,生成速度分析信号并将速度分析信号发送至速度分 析单元。
进一步地,所述速度分析单元接收到速度分析信号后,对信号波速度和人 体活动速度进行分析,具体分析过程如下:
步骤TT1:获取到雷达发生信号波的初始位置,并标记为初始发射位置,随 后获取到信号波接触到人体的位置,并标记为人体初始位置,随后通过公式
步骤TT2:随后通过摄像头获取到人体当前的运动状态,若人体当前状态为 静止状态,则判定人体的初速度为0,获取到人体的运动速度V
步骤TT3:若人体当前状态为活动状态,则判定人体的初速度为V
进一步地,所述注册登录单元用于用户通过手机终端提交用户信息进行注 册,并将注册成功的用户信息发送至数据库进行储存,用户信息包括用户的姓 名、年龄、使用雷达信号以及本人实名认证的手机号码;用户注册成功后,通 过手机终端发送雷达使用信号至雷达管理平台。
一种基于毫米波雷达的人体感知方法,具体人体感知方法步骤如下:
步骤一、雷达信号检测,雷达管理平台接收到雷达使用信号,控制雷达进 行工作,雷达通过若干个电线发射出信号波,随后雷达管理平台生成信号差异 检测信号,并将信号差异检测信号发送至信号差异单元,所述信号差异单元接 收到信号差异检测信号后,对雷达发生的信号波进行检测;
步骤二、差频信号检测,雷达管理平台接收到信号波X(t)与发射信号波 X'(t)后,生成准确分析信号并将准确分析信号发送至准确分析单元,准确 分析单元接收到准确分析信号后,对信号波与反射信号波的差频信号进行计算;
步骤三、静态消除,静态消除单元接收到误差信号后,对雷达发射信号波 的静态干扰数据进行分析,从而对信号波进行静态消除;
步骤四、速度分析,速度分析单元接收到速度分析信号后,对信号波速度 和人体活动速度进行分析。
与现有技术相比,本发明的有益效果是:
1、本发明中,雷达管理平台接收到信号波X(t)与发射信号波X'(t) 后,生成准确分析信号并将准确分析信号发送至准确分析单元,准确分析单元 接收到准确分析信号后,对信号波与反射信号波的差频信号进行计算,获取到 信号波发射时刻的瞬时相位,并将瞬时相位标记为m瞬(t),随后将发射信号 波与接收信号波进行混频处理;将时间延时K代入公式计算获取到差频信号的 瞬时相位,并将差频信号的瞬时相位为M瞬(t),将时间延时K的计算式代入 计算,通过M瞬(t)的计算式对信号波的载波频率、调频带宽以及初始相位依次进行赋值处理,将差频标记为m,通过载波频率、调频带宽以及初始相位可代 入计算获取到差频信号,随后将差频信号发送至雷达管理平台;雷达管理平台 接收到差频信号后,将差频信号X差(t)与差频信号的阈值进行比较:若差频 信号X差(t)≥差频信号的阈值,则判定雷达检测有误差,生成误差信号并将 误差信号发送至静态消除单元;若差频信号X差(t)<差频信号的阈值,则判 定雷达检测无误差,生成无误差信号并将无误差信号发送至用户的手机终端; 对雷达信号波的差频信号进行检测,提高人体感知的准确性能,从而提高了工 作效率,大大减少了误差;
2、本发明中,通过静态消除单元接收到误差信号后,对雷达发射信号波的 静态干扰数据进行分析,从而对信号波进行静态消除,获取到误差信号,通过 公式获取到静态干扰清除系数JC,若静态干扰清除系数JC≥静态干扰清除系数 阈值,则判定信号波需要静态干扰消除,生成静态消除信号并将静态消除信号 发送至雷达管理平台,雷达管理平台接收到静态消除信号后,对信号波的相邻 帧进行减法运算,将信号波的静态干扰进行消除;若静态干扰清除系数JC<静 态干扰清除系数阈值,则判定信号波不需要静态干扰消除,生成无干扰信号并 将无干扰信号发送至雷达管理平台,雷达管理平台接收到无干扰信号后,生成 速度分析信号并将速度分析信号发送至速度分析单元;对信号波传输过程中的 静态干扰进行消除,提高了雷达的准确性能。
附图说明
为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
图1为本发明的原理框图。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所 描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明 中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有 其它实施例,都属于本发明保护的范围。
如图1所示,一种基于毫米波雷达的人体感知系统,包括雷达管理平台、 信号差异单元、准确分析单元、静态消除单元、速度分析单元、注册登录单元 以及数据库;
注册登录单元用于用户通过手机终端提交用户信息进行注册,并将注册成 功的用户信息发送至数据库进行储存,用户信息包括用户的姓名、年龄、使用 雷达信号以及本人实名认证的手机号码;用户注册成功后,通过手机终端发送 雷达使用信号至雷达管理平台;
雷达管理平台接收到雷达使用信号,控制雷达进行工作,雷达通过若干个 电线发射出信号波,随后雷达管理平台生成信号差异检测信号,并将信号差异 检测信号发送至信号差异单元,信号差异单元接收到信号差异检测信号后,对 雷达发生的信号波进行检测,具体检测过程如下:
步骤S1:获取到信号波的载波频率、调频带宽以及调频周期,并将信号波 的载波频率、调频带宽以及调频周期分别标记为PL、DK以及ZQ;
步骤S2:将信号的初始相位标记为CS,通过代入计算获取到信号波的计算 式,即计算式为
步骤S3:信号波在发射的同时记录当前时刻,并标记为发射时刻,信号波 在接触到人体后记录当前时刻,并标记为接收时刻,通过接收时刻与发射时刻 的比较获取到信号波发射时长p,随后获取到信号波发射时长内的信号波发射距 离,并将信号波的发射距离标记为JL,信号波接触人体后进行反射,即信号波 的传播距离为2JL,随后通过公式获取到雷达接收信号波与发射信号波存在的时 间延时K,即
步骤S4:通过代入计算获取到发射信号波的计算式,即计算式为
雷达管理平台接收到信号波X(t)与发射信号波X'(t)后,生成准确分 析信号并将准确分析信号发送至准确分析单元,准确分析单元接收到准确分析 信号后,对信号波与反射信号波的差频信号进行计算,具体差频信号的计算过 程如下:
步骤SS1:获取到信号波发射时刻的瞬时相位,并将瞬时相位标记为m瞬(t), 即
步骤SS2:将时间延时K代入公式计算获取到差频信号的瞬时相位,并将差 频信号的瞬时相位为M瞬(t):
即
步骤SS3:通过M瞬(t)的计算式对信号波的载波频率、调频带宽以及初 始相位依次进行赋值处理,将差频标记为m,即载波频率为
步骤SS4:通过载波频率、调频带宽以及初始相位可代入计算获取到差频信 号,即差频信号为
步骤SS5:雷达管理平台接收到差频信号后,将差频信号X差(t)与差频 信号的阈值进行比较:
若差频信号X差(t)≥差频信号的阈值,则判定雷达检测有误差,生成误 差信号并将误差信号发送至静态消除单元;
若差频信号X差(t)<差频信号的阈值,则判定雷达检测无误差,生成无 误差信号并将无误差信号发送至用户的手机终端;
静态消除单元接收到误差信号后,对雷达发射信号波的静态干扰数据进行 分析,从而对信号波进行静态消除,信号波的静态干扰数据包括数量数据、噪 声数据以及磁场数据,数量数据为信号波在传送途中反射路径数量,噪声数据 为信号波在传送途中周边环境的分贝值,磁场数据为信号波在传送途中周边环 境的磁场强度,具体分析检测过程如下:
步骤T1:获取到信号波在传送途中反射路径数量,并将信号波在传送途中 反射路径数量标记为FSL;
步骤T2:获取到信号波在传送途中周边环境的分贝值,并将信号波在传送 途中周边环境的分贝值标记为FBZ;
步骤T3:获取到信号波在传送途中周边环境的磁场强度,并将信号波在传 送途中周边环境的磁场强度标记为ZQD;
步骤T4:通过公式
步骤T5:将静态干扰清除系数JC与静态干扰清除系数阈值进行比较:
若静态干扰清除系数JC≥静态干扰清除系数阈值,则判定信号波需要静态 干扰消除,生成静态消除信号并将静态消除信号发送至雷达管理平台,雷达管 理平台接收到静态消除信号后,对信号波的相邻帧进行减法运算,将信号波的 静态干扰进行消除;
若静态干扰清除系数JC<静态干扰清除系数阈值,则判定信号波不需要静 态干扰消除,生成无干扰信号并将无干扰信号发送至雷达管理平台,雷达管理 平台接收到无干扰信号后,生成速度分析信号并将速度分析信号发送至速度分 析单元;
速度分析单元接收到速度分析信号后,对信号波速度和人体活动速度进行 分析,具体分析过程如下:
步骤TT1:获取到雷达发生信号波的初始位置,并标记为初始发射位置,随 后获取到信号波接触到人体的位置,并标记为人体初始位置,随后通过公式
步骤TT2:随后通过摄像头获取到人体当前的运动状态,若人体当前状态为 静止状态,则判定人体的初速度为0,获取到人体的运动速度V
步骤TT3:若人体当前状态为活动状态,则判定人体的初速度为V
一种基于毫米波雷达的人体感知方法,具体人体感知方法步骤如下:
步骤一、雷达信号检测,雷达管理平台接收到雷达使用信号,控制雷达进 行工作,雷达通过若干个电线发射出信号波,随后雷达管理平台生成信号差异 检测信号,并将信号差异检测信号发送至信号差异单元,信号差异单元接收到 信号差异检测信号后,对雷达发生的信号波进行检测;
步骤二、差频信号检测,雷达管理平台接收到信号波X(t)与发射信号波 X'(t)后,生成准确分析信号并将准确分析信号发送至准确分析单元,准确 分析单元接收到准确分析信号后,对信号波与反射信号波的差频信号进行计算;
步骤三、静态消除,静态消除单元接收到误差信号后,对雷达发射信号波 的静态干扰数据进行分析,从而对信号波进行静态消除;
步骤四、速度分析,速度分析单元接收到速度分析信号后,对信号波速度 和人体活动速度进行分析。
本发明工作原理:
雷达管理平台接收到雷达使用信号,控制雷达进行工作,雷达通过若干个 电线发射出信号波,随后雷达管理平台生成信号差异检测信号,并将信号差异 检测信号发送至信号差异单元,信号差异单元接收到信号差异检测信号后,对 雷达发生的信号波进行检测,具体检测过程如下:获取到信号波的载波频率、 调频带宽以及调频周期,通过代入计算获取到信号波的计算式,信号波在发射 的同时记录当前时刻,并标记为发射时刻,信号波在接触到人体后记录当前时 刻,并标记为接收时刻,通过接收时刻与发射时刻的比较获取到信号波发射时 长p,随后获取到信号波发射时长内的信号波发射距离信号波接触人体后进行反 射,即信号波的传播距离为2JL,随后通过公式获取到雷达接收信号波与发射信 号波存在的时间延时K,通过代入计算获取到发射信号波的计算式。
上述公式均是去量纲取其数值计算,公式是由采集大量数据进行软件模拟 得到最近真实情况的一个公式,公式中的预设参数由本领域的技术人员根据实 际情况进行设置。
以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术 人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代, 只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明 的保护范围。
- 一种基于毫米波雷达的人体感知方法及其系统
- 基于毫米波雷达的人体感知方法及其系统