一种双自由度连续旋转面形自适应抛光装置及方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及一种机械制造领域的自由曲面抛光装置,尤其涉及一种双自由度连续旋转面形自适应抛光装置及方法。
背景技术
近年来,随着光电通讯、生物医疗、天文光学等技术的飞速发展,超精密加工技术也相应的飞速发展,加工精度向着纳米与原子级别发展,如何提高抛光精度以及如何对自由曲面、复杂异型面进行抛光成为了必须被攻克的课题。例如复杂的大型望远镜反射镜,光刻掩膜,人工生物植入,低刚性钛合金航空发动机叶片,自由形状光学镜头等。
传统的加工技术已经可以制造出面形精度非常高的平面镜或球面镜,但也正因为光学系统是由球面镜构成,其成像质量也受到了或多或少的限制。若要消除球面镜的像差特性就需要增加镜片的数量,这也就不可避免的增加了镜头的体积和重量。如果在传统的球面镜上更改局部的曲率,就可以消除球面镜像差,提高聚焦和校准精度。在众多精密与超精密加工技术中,抛光工艺通常作为最后一道工序。因此抛光技术直接关系着表面质量是否达到所要求的精度。我国对复杂自由曲面的精密制造依然受制于抛光周期长、成本高、设备简单与表面质量差。目前亟待解决在提高抛光精度的同时如何对自由曲面、复杂异型面进行抛光。
发明内容
针对上述现有技术中存在加工精度低、效率不高和表面纹理差的问题,提供了一种双自由度连续旋转面形自适应抛光装置及方法,该装置具有气囊抛光的面形自适应性,也具有双轴砂轮抛光实现均匀光滑表面纹理性能。本发明可以针对球面或非球面等任意曲面光学元件进行加工,获得超光滑的表面和低损伤的亚表面。基于现有抛光工艺存在的问题,可以对一些复杂的异形面进行抛光,具有实现均匀光滑表面纹理性能,材料去除函数是旋转对称的类高斯分布函数,表面误差收敛速度快,同时可以抑制中、高频误差,实现均匀光滑表面纹理性能,通过合理地控制加工参数降低亚表面损伤,提高表面完整性和加工效率。
为了解决上述技术问题,本发明提出的一种双自由度连续旋转面形自适应抛光装置,包括力位控制器,所述力位控制器连接有力位控制器连接器和用于连接气泵管路和力位控制器的旋转接头,所述力位控制器连接器固定有所述第一电机,所述第一电机的输出端相连有减速器,所述减速器的被动轴连接有旋转支座,所述力位控制器连接器和所述的旋转支座之间设有用于防止电机线路和气泵管路缠绕的360°旋转装置,所述旋转支座上设有柔性抛光轮,所述柔性抛光轮由第二电机驱动,所述柔性抛光轮在所述第一电机驱动下实现绕Z轴做连续旋转的公转,同时在第二电机的带动下绕自身的旋转轴自转。
进一步讲,本发明所述的双自由度连续旋转面形自适应抛光装置,其中:
所述力位控制器用于控制所述柔性抛光轮的Z向进给量及所述的柔性抛光轮施加给工件的载荷。
该装置通过所述力位控制器连接器与设备或是动平台或是机器人相连。
所述减速器的输出端与连接轴的一端相连,所述的360°旋转装置设置在所述的连接轴上,所述的旋转支座设置在所述连接轴的另一端,所述的360°旋转装置包括定子和转子,所述的定子与所述的连接轴固连,所述的转子与所述的旋转支座固连。
所述连接轴与所述旋转支座、减速器和360°旋转装置之间为可拆卸连接,所述360°旋转装置带动旋转支座转动的同时,在力位控制器的控制下,给所述的柔性抛光轮施加一定的载荷或者一定的进给量,并通过所述力位控制器内部的传感元件自动补偿,以确保施加的载荷和进给量在加工过程中保持恒定。
所述的第一电机通过所述减速器和连接轴将动力传递给所述的360°旋转装置转子,从而实现旋转支座连续旋转,其转速范围为10-500rpm;所述第二电机通过齿轮传动机构将动力传递给所述的柔性抛光轮,所述齿轮传动机构的传动比可调,所述的柔性抛光轮的转速调节范围为50-2000rpm。
所述柔性抛光轮固定在抛光轮轴上,所述抛光轮轴的两端分别设有进气孔和排气孔,所述抛光轮轴的轴颈上有通气孔,用以向所述的柔性抛光轮的内部供给压缩空气,通过调节供气压力的大小来控制所述柔性抛光轮与工件表面加工区域的接触面积,所述柔性抛光轮内部填充气压的范围可为0.02-0.4Mpa。
所述齿轮传动机构中的齿轮轴通过轴承固定在所述旋转支座上。
同时,本发明中还提出了采用上述双自由度连续旋转面形自适应抛光装置的抛光方法,所述柔性抛光轮设有多个可更换的抛光皮,所述抛光皮的工作面设有功能性表面纹路;多个可更换的抛光皮包括阻尼布、聚氨酯抛光皮、固结磨料磨抛垫和抛光砂纸;根据实际加工应用需求选择安装上述中的一种抛光皮;
在抛光过程中:有以下两种情形:
1)单独使用所述柔性抛光轮的自转,沿一定运动轨迹去除工件表面材料;
2)所述柔性抛光轮自转和公转,并沿一定运动轨迹去除工件表面材料,同时,通过控制所述第一电机的转向进而更改所述柔性抛光轮公转的旋转方向,工件表面材料的去除函数是旋转对称的类高斯分布函数,使表面误差快速收敛,同时可以抑制中、高频误差,从而在去除工件表面材料的同时形成了均匀光滑表面纹理;通过合理地控制加工参数降低亚表面损伤,提高表面完整性和加工效率。
在抛光过程中,使用的抛光液是氧化铝、氧化铈、氧化锆、氧化硅、金刚石、硅溶胶中的任何一种。
与现有技术相比,本发明的有益效果是:
(1)本发明抛光装置的柔性抛光轮在360°旋转装置带动旋转支座转动的同时,在力位控制器的控制下,给柔性抛光轮施加一定的载荷或者一定的进给量,并通过内部的传感元件自动补偿,确保施加的载荷和进给量在实验过程中保持恒定;
(2)本发明具有面形自适应性,相对于刚性的抛光轮,本发明抛光装置中采用的柔性抛光轮可以对一些复杂的异形面进行抛光,具有实现均匀光滑表面纹理性能,因为该柔性抛光轮同时具有公转和自转,材料去除函数是旋转对称的类高斯分布函数,可以使表面误差快速收敛,同时可以抑制中、高频误差,实现均匀光滑表面纹理性能,通过合理地控制加工参数降低亚表面损伤,提高表面完整性和加工效率。
(3)本发明装置具有模块化的优势,通过力位控制器连接器可以连接到不同机床、机械臂或者其他运动平台上,使抛光装置与实际的外部加工装备和实验条件相匹配;
(4)本发明装置的传动机构采用齿轮(组)传动机构,可以根据抛光加工中对转速的要求,换用不同的传动比的齿轮组,齿轮传动机构可以实现平稳的传动,传动精度高,使抛光轮达到很高的转速,从而提高抛光效率。
附图说明
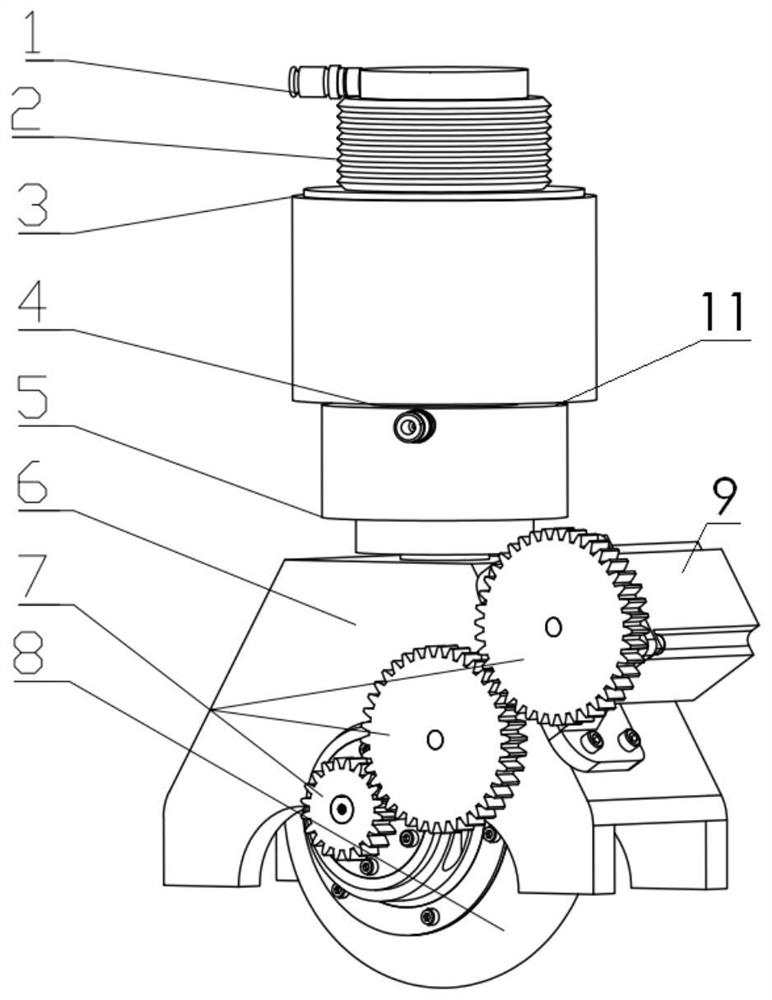
图1为本发明装置的立体结构示意图。
图2为图1所示本发明装置的另一视角的立体结构示意图。
图中:1-旋转接头,2-力位控制器,3-力位控制器连接器,4-第一电机,5-360°旋转装置,6-旋转支座,7-齿轮传动机构,8-柔性抛光轮,9-第二电机,10-电机支座,11-减速器。
具体实施方式
下面结合附图及具体实施例对本发明做进一步的说明,但下述实施例绝非对本发明有任何限制。
在本发明的描述中,需要说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
如图1和图2所示,本发明提出的一种双自由度连续旋转面形自适应抛光装置,包括力位控制器2,所述力位控制器2连接有力位控制器连接器3和用于连接气泵管路和力位控制器的旋转接头1,所述力位控制器连接器3固定有所述第一电机4,所述第一电机4的输出端相连有减速器11,所述减速器11的被动轴连接有旋转支座6,所述力位控制器连接器3和所述的旋转支座6之间设有用于防止电机线路和气泵管路缠绕的360°旋转装置5,所述旋转支座6上设有柔性抛光轮8,所述柔性抛光轮8由第二电机9驱动,所述柔性抛光轮8在所述第一电机4驱动下实现绕Z轴做连续旋转的公转,同时在第二电机9的带动下绕自身的旋转轴自转。所述力位控制器2用于控制所述柔性抛光轮8的Z向进给量及所述的柔性抛光轮8施加给8工件的载荷。
所述减速器11的输出端与连接轴的一端相连,所述的360°旋转装置5设置在所述的连接轴上,所述的旋转支座6设置在所述连接轴的另一端,所述的360°旋转装置包括定子和转子,所述的定子与所述的连接轴固连,所述的转子与所述的旋转支座6固连。所述连接轴与所述旋转支座6、减速器11和360°旋转装置5之间为可拆卸连接,所述360°旋转装置5带动旋转支座6转动的同时,在力位控制器2的控制下,给所述的柔性抛光轮8施加一定的载荷或者一定的进给量,并通过所述力位控制器2内部的传感元件自动补偿,以确保施加的载荷和进给量在加工过程中保持恒定。
所述的第一电机4通过所述减速器11和连接轴将动力传递给所述的360°旋转装置5转子,从而实现旋转支座6连续旋转,其转速范围为10-500rpm;所述第二电机9通过齿轮传动机构7将动力传递给所述的柔性抛光轮8,所述齿轮传动机构7中的齿轮轴通过轴承固定在所述旋转支座6上,所述齿轮传动机构7的传动比可调,所述的柔性抛光轮8的转速调节范围为50-2000rpm。
所述柔性抛光轮8固定在抛光轮轴上,所述抛光轮轴10的两端分别设有进气孔和排气孔,所述抛光轮轴10的轴颈上有通气孔,用以向所述的柔性抛光轮8的内部供给压缩空气,通过调节供气压力的大小来控制所述柔性抛光轮8与工件表面加工区域的接触面积,所述柔性抛光轮8内部填充气压的范围可为0.02-0.4Mpa。
该装置通过所述力位控制器连接器3与设备或是动平台或是机器人相连。
本发明中的所述柔性抛光轮8设有多个可更换的抛光皮,所述抛光皮的工作面设有功能性表面纹路;多个可更换的抛光皮包括阻尼布、聚氨酯抛光皮、固结磨料磨抛垫和抛光砂纸;根据实际加工应用需求选择安装上述中的一种抛光皮;
在抛光过程中:有以下两种情形:
一是,可以单独使用所述柔性抛光轮8的自转,沿一定运动轨迹去除工件表面材料;
二是,所述柔性抛光轮8自转和公转,并沿一定运动轨迹去除工件表面材料,同时,通过控制所述第一电机4的转向进而更改所述柔性抛光轮8公转的旋转方向,工件表面材料的去除函数是旋转对称的类高斯分布函数,使表面误差快速收敛,同时可以抑制中、高频误差,从而在去除工件表面材料的同时形成了均匀光滑表面纹理;通过合理地控制加工参数降低亚表面损伤,提高表面完整性和加工效率。
在抛光过程中,使用的抛光液是氧化铝、氧化铈、氧化锆、氧化硅、金刚石、硅溶胶中的任何一种。
实施例1:
在本实例中,可将本发明中的力位控制器连接器3通过与机床的连接装置垂直安装于数控机床工作台上方的主轴箱上,将待加工工件固定在机床工作台上,在抛光加工开始之前首先对整套装置进行标定,然后向柔性抛光轮8中充入0.15Mpa的气压,利用压力泵将预先混合好的抛光液喷洒向柔性抛光轮8与加工工件表面接触的区域,开启柔性抛光轮8自转和公转,自转转速范围500rpm,公转转速范围200rpm。然后通过工作台和主轴箱的联合运动,将柔性抛光轮8移动至待加工表面位置;调节力位控制器2的参数,使接触力为70N,在加工过程中,首先根据工件的初始面型误差计算驻留时间和最优化的加工轨迹,生成数控加工程序,将加工程序导入机床并对工件表面进行精确的研磨和抛光,加工后表面Ra粗糙度达到30nm左右。
实施例2:
本实例中,可将本发明中的力位连接器3安装于可灵活调整移动的工业机器人机械臂上,通过调整机械臂来控制柔性抛光轮8与工件表面接触的位置和姿态,由于工业机器人的多自由度灵活性,可适应不同的复杂自由曲面表面的研磨和抛光工艺的需求。在实验开始之前首先对整套装置进行标定,然后向柔性抛光轮8中充入0.15Mpa的气压,利用压力泵将预先混合好的抛光液喷洒向抛光轮与加工工件表面接触的区域,开启抛光轮自转和公转,自转转速范围800rpm,公转转速范围100rpm。然后通过机器人末端关节运动,将柔性抛光轮8移动至与待加工表面刚好接触的位置;调节力位控制器2的参数,使接触力为50N,在加工过程中,首先根据工件的初始面型误差计算驻留时间和最优化的加工轨迹,生成加工轨迹程序并导入机器人PC端,对工件表面进行精确的研磨和抛光,加工后表面Ra粗糙度达到20nm左右。
在加工过程中可通过调节柔性抛光轮8自转速度、公转速度、柔性抛光轮8内部气压大小、力位控制器2提供力的大小、加工点的驻留时间及加工面的进给速度,实现工件表面的精密抛光,相对于刚性的抛光轮,柔性抛光轮可以对一些复杂的异形面进行抛光,具有实现均匀光滑表面纹理性能,因为同时具有公转和自转,材料去除函数是旋转对称的类高斯分布函数,可以使表面误差快速收敛,同时可以抑制中、高频误差,实现均匀光滑表面纹理性能,通过合理地控制加工参数降低亚表面损伤,提高表面完整性和加工效率。
尽管上面结合附图对本发明进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨的情况下,还可以做出很多变形,这些均属于本发明的保护之内。
- 一种双自由度连续旋转面形自适应抛光装置及方法
- 一种双自由度连续旋转面形自适应抛光装置