一种仿蝠鲼胸鳍样机水动力性能试验平台及测试方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明属于试验平台及测试方法领域,涉及一种仿蝠鲼胸鳍样机水动力性能试验平台及测试方法。
背景技术
我国是一个海洋大国,海域面积十分辽阔,要进一步关心海洋、认识海洋、经略海洋,以推动我国海洋强国建设不断取得新成就。大规模的开发和利用海洋资源,是人类21世纪即将面对和亟待解决的现实问题,而要适应这种需求发展,研究和发展水下航行器和水下机器人将是一种极佳的选择。水下鱼类经过了漫长时间的进化,其推进效率和游动性能大大优于目前人类设计的各种机械结构,因此采用仿生手段对航行器进行研制已经成为国际上的研究热点。蝠鲼主要通过胸鳍的扑动来获得推力,这一点和鸟类非常相似。通过对胸鳍攻角的调整,蝠鲼在胸鳍上升和下降的过程中可以产生升力。从性能上来讲,研究表明,鳐科生物的巡游效率可高达89%,高于鳗科、鲹科等水中生物,因此无论从推进性能还是生物学形态方面,蝠鲼都可以作为水下航行器的仿生对象,具有巨大的仿生价值。在设计仿蝠鲼胸鳍样机的过程中,模型试验是一个必不可少的环节,通过模型试验来获取该型胸鳍样机的关键水动力性能参数,从而评价该型胸鳍样机的性能,为设计提供参考和依据。本发明所述的一种仿蝠鲼胸鳍样机水动力性能试验平台及测试方法,可以提供一种在循环水槽中进行仿蝠鲼胸鳍样机水动力性能研究的试验平台,以及基于此平台的测试方法。具体来说,在该测试平台下,利用此方法可以测量出仿蝠鲼胸鳍样机的能量转换效率、主轴载荷、扭矩系数及推力系数等衡量仿蝠鲼胸鳍样机性能参数优劣的关键参数,从而可以为仿蝠鲼胸鳍样机工程样机的设计提供参考与借鉴,同时还可以为仿蝠鲼胸鳍样机水动力性能的 CFD数值模拟和理论研究提供实验验证。
发明内容
要解决的技术问题
为了避免现有技术的不足之处,本发明提出一种仿蝠鲼胸鳍样机水动力性能试验平台及测试方法,可以测出仿蝠鲼胸鳍样机的能量转换效率、主轴载荷、推力系数等衡量仿蝠鲼胸鳍样机性能优劣的关键参数,同时为样机设计提供指导意见,兼具易操作、精度高等优点的仿蝠鲼胸鳍样机水动力性能试验平台及测试方法。
技术方案
一种仿蝠鲼胸鳍样机水动力性能试验平台,其特征在于包括循环水槽1、搭载平台4、光学平台17、叶轮10、光学平台15、激光发射器12和高速相机13;循环水槽1为U型结构,U型的一端设有叶轮10,U型结构另一端的平直段为循环水槽试验段3,试验段上设有搭载平台4,搭载平台4的下方设有光学平台15,光学平台15上设有激光发射器12和高速相机13;所述搭载平台4上设有气浮轴承16和连接件5;所述循环水槽1的循环水槽试验段3的外壁为透明体,激光发射器12和高速相机13 位于透明体的部位;U型结构端口的第一拐角6与第二拐角7之间连接有回流管道,穿过U型结构端口的两个端面,为从第一拐角上表面延伸到第二拐角上表面的贯穿通孔23。
所述搭载平台9为四个柱子的框架结构,框架采用合金钢。
所述叶轮10为多个叶轮。
所述回流管道的贯穿通孔23直径微大于0.6m。
一种采用所述仿蝠鲼胸鳍样机水动力性能试验平台的测试方法,其特征在于步骤如下:
步骤1:将六轴力/力矩传感器14与搭载平台4,气浮轴承16上的连接件5相连接,仿蝠鲼胸鳍样机2与六轴力/力矩传感器14相连接,仿蝠鲼胸鳍样机2置于循环水槽试验段3内;
确定好样机的攻角,并校准样机初始位置;
步骤2:接通试验平台的所有电源,包括传感器网箱外接电源、DPIV系统电源、扑翼控制系统的电源;
步骤3:打开传感器记录软件,确认传感器和电脑建立通讯正常,确认传感器安装方向与力的方向保持一致,确保在稍后的实验中能准确的记录及传输实验数据;
步骤4:打开DPIV软件,明确实验研究对象为样机翼尖或是样机尾迹,观察电脑画面,确保高速相机能完整拍摄出关注区域,再进行参数调节,确保实验中能拍摄出完整且清晰的流场、涡场、运动轨迹的图像;
步骤5:开启循环水槽,设定水流速度为实验流速v;
步骤6:当仿蝠鲼胸鳍样机保持稳定运动时,开始记录实验数据,将六轴力/力矩传感器记录下的力学数据保存并导出,将DPIV系统记录下的流场参数保存并导出;
步骤7:在调整样机攻角或是改变样机运动参数重新进行实验时应等待循环水槽中液面平稳,待所有实验结束后,关闭所有电源;
步骤8:采用DPIV系统中的分析模块,根据实验参数和测试的六轴力/力矩传感器的力学数据,DPIV系统记录下的流场参数,进行流场分析。
有益效果
本发明提出的一种仿蝠鲼胸鳍样机水动力性能试验平台及测试方法,根据实际情况自由更换。所述仿蝠鲼胸鳍样机的水动力性能测试方法,采用水动力性能试验平台包括循环水槽、搭载平台以及测试系统;本发明中仿蝠鲼胸鳍样机水动力性能测试方法可以测试出仿蝠鲼胸鳍样机的能量转换效率、扭矩系数及推力系数等衡量仿蝠鲼胸鳍样机性能优劣的关键参数,同时还能对样机翼尖以及样机尾迹流场、涡场进行分析,可以为仿蝠鲼胸鳍样机工程样机外形设计优化提供指导意见,还可以为仿蝠鲼胸鳍样机水动力性能CFD数值模拟和理论研究提供实验依据。
附图说明
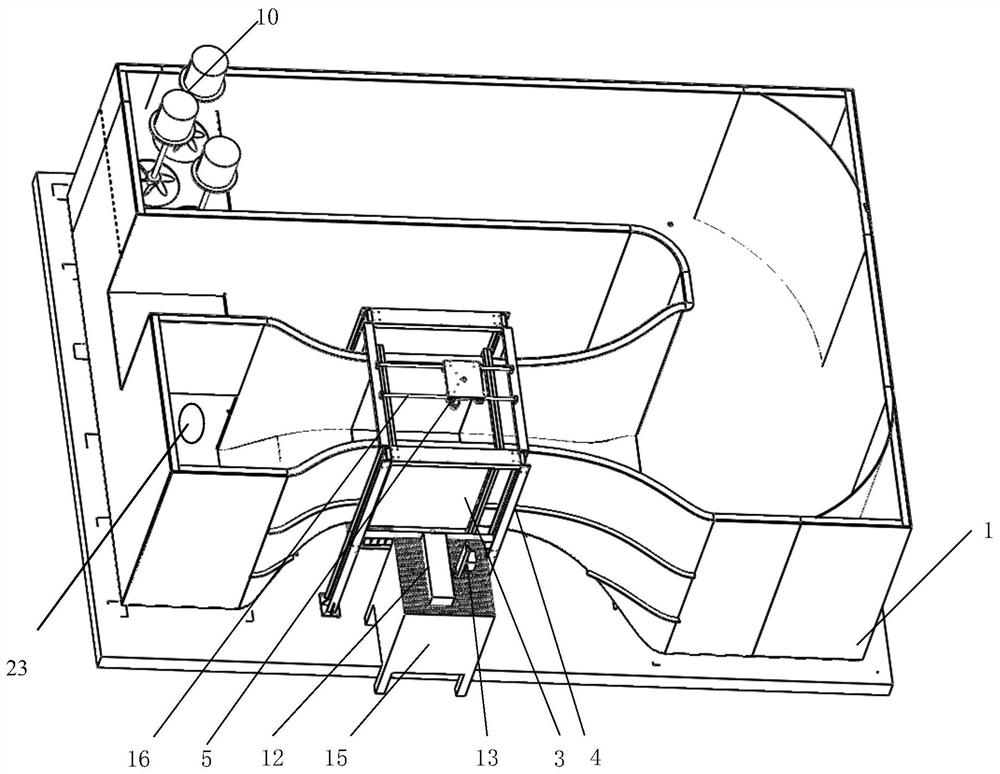
图1为试验平台总装图;
图2为循环水槽俯视图;
图3为搭载平台示意图
图4为试验段测试系统布放图;
图5为测试流程图。
附图标记说明:1——循环水槽,2——仿蝠鲼胸鳍样机,3——循环水槽试验段,4——搭载平台,5——连接杆件,6——第一拐角,7——第二拐角,8——第三拐角, 9——第四拐角,10——叶轮,11——激光面,12——激光发射器,13——高速相机,14——六轴力/力矩传感器,15——光学平台,19——导轨气浮导轨/普通滑轨,20——连接件,21——导轨连接件,22——搭载平台。
具体实施方式
现结合实施例、附图对本发明作进一步描述:
本发明解决其技术问题所采用的技术方案是一种仿蝠鲼胸鳍样机水动力性能试验平台及测试方法,包括,循环水槽、搭载平台以及测试系统;所述搭载平台用于安装固定仿蝠鲼胸鳍样机,搭载平台处于循环水槽试验段正上方,利于仿蝠鲼胸鳍样机能伸入循环水槽内部;所述测试系统包括:六轴力/力矩传感器、DPIV系统;所述DPIV 系统包含激光发射器、高速相机、荧光粒子、计算机含流场分析模块。
一种仿蝠鲼胸鳍样机水动力性能试验平台包括循环水槽1、搭载平台4、测试系统,测试系统由激光发射器12,高速相机13,六轴力/力矩传感器14共同构成。
图1为试验平台总装图,循环水槽1占地面积约为60平方米,搭载平台4采用合金钢搭建而成,并固定在水平地面上;通过搭载平台4上的连接杆件5实现仿蝠鲼胸鳍样机的吊装;试验平台还配备有测试系统,测试系统由激光发射器12,高速相机13 组成,为保证其水平度、垂直度,将激光发射器12,高速相机13摆放在光学平台15 上。
图2为循环水槽俯视图,试验段用透明亚克力板粘接而成,在其周围安装有约束张力的框架使其具有侧向承压能力,洞体主体其他部分用15mm厚PP板焊接而成。循环水槽动力由三个0.6m直径的铝制叶轮8叶10提供;第一拐角6与第二拐角7之间的连接管道为贴近地面的回流管道,且延伸至第二拐角7,其延伸至第二拐角7处的上表面有一直径微大于0.6m的圆洞,叶轮旋转时将水从中抽出,提高后端水位,使其流向下游,故水流方向为顺时针;循环水槽试验段3的横截面为1.2m×1.2m,长度也为1.2m,试验段中心区域流速为0.1m/s到0.8m/s连续可调,控制精度在0.01m/s,流速稳定时间2min。
图3为试验段测试系统布放图,六轴力/力矩传感器14安装在连接杆件5与仿蝠鲼胸鳍样机2之间用于记录实验中产生的力学数据;探究样机尾迹流场、涡场时,激光发射器12处于循环水槽试验段3的正前方,便于发射出位于仿蝠鲼胸鳍样机后方的水平激光面11,高速相机13摆放在循环水槽试验段3的正下方,便于完整拍摄仿蝠鲼胸鳍样机2的尾部流场;当探究样机翼尖流场、涡场时,调整激光发射器12到样机附近,同时调整高速相机13到样机翼尖正下方,便于拍摄出完整的仿蝠鲼胸鳍样机的翼尖涡场及流场。
测试方法包括以下步骤:
步骤一:将六轴力/力矩传感器14与搭载平台4,气浮轴承16上的连接件5相连接,仿蝠鲼胸鳍样机2与六轴力/力矩传感器14相连接,仿蝠鲼胸鳍样机2置于循环水槽试验段3内;确定好样机的攻角,并校准样机初始位置;
步骤二:接通试验平台的所有电源,包括样机控制器电源、传感器网箱外接电源、DPIV系统电源、循环水槽电源;
步骤三:打开传感器记录软件,确认传感器和电脑建立通讯正常,确认传感器安装方向与力的方向保持一致,确保在稍后的实验中能准确的记录及传输实验数据;
步骤四:打开DPIV软件,明确实验研究对象为样机翼尖或是样机尾迹,观察电脑画面,确保高速相机能完整拍摄出关注区域,然后进行参数设置,调节清晰度时应当注意各项相机参数及镜头参数的配合,仔细观察电脑中显示的相机拍摄处的实时情况,确保实验中能拍摄出完整且清晰的流场、涡场、运动轨迹的图像;
步骤五:开启循环水槽,设定水流速度为实验流速v;
步骤六:当仿蝠鲼胸鳍样机保持稳定运动时,开始记录实验数据,将六轴力/力矩传感器记录下的力学数据保存并导出,将DPIV系统记录下的流场参数保存并导出;
步骤七:在调整样机攻角或是改变样机运动参数重新进行实验时应等待循环水槽中液面平稳,待所有实验结束后,关闭所有电源测。
步骤八:处理数据,计算能量利用率、推力系数等参数,并可利用DPIV系统中的分析模块进行流场、涡场分析。
在测试能量利用率方面,本方法主要通过传感器测试出仿蝠鲼胸鳍样机受到的力,循环水槽的水流速度v已知,故两者相乘可得到有用功,电机所有参数均已知,可以得到总功,再用有用功除总功可以得出能量利用率。
在流场特性分析方面,将DPIV系统拍摄得到的视频文件导入后处理软件可以进行流场特性如涡的形态变化,流场内不同点的速度差异度等分析,还可以通过后处理软件对仿蝠鲼胸鳍样机机身各个关键位置点进行轨迹追踪。
- 一种仿蝠鲼胸鳍样机水动力性能试验平台及测试方法
- 一种水平轴潮流能水轮机水动力性能试验平台及测试方法