一种自动排水系统及方法
文献发布时间:2023-06-19 12:05:39
技术领域
本公开涉及煤矿排水领域,尤其涉及一种自动排水系统及方法。
背景技术
煤矿井下地质条件差且水大,为了排出煤矿井下的水量,需使用较多数量的水泵,由此导致排水占用人员多且水仓排水不及时经常溢出。
更具体的,由于矿井底下车场排水地点多,管理难度大,长期排水中发现有些时候水仓的水满了缺来不及开泵,造成水溢出水仓,有些时候水仓没水了水泵却还在空转。
有鉴于此,有必要研究出一种自动排水系统及方法,以解决水仓排水不及时经常溢出或水仓没水时水泵空转的问题。
发明内容
本公开的实施例提供一种自动排水系统及方法,采用自动排水方案,井下各临时排水点实现无人值守排水,既节省了人力资源又防止了积水溢出。
为达到上述目的,本公开的实施例采用如下技术方案:
一方面,提供一种自动排水系统,包括:设置在水仓内的水位信号监测装置、放置在水仓内的水泵、与所述水泵电连接的控制器;所述控制器与所述水位信号监测装置和所述水泵均连接;
所述水位信号监测装置随水仓内的水位高低上下移动;所述水位信号监测装置向所述控制器发送水泵启停信号,所述控制器控制所述水泵工作。
结合一方面,在一种可能的实现方式中,所述水位信号监测装置随所述水仓内水位上升而上升,所述水位信号监测装置运动到最高点时向所述控制器发送水泵启动信号;
所述水位信号监测装置随所述水仓内水位下降而下降,所述水位信号监测装置运动到最低点时向所述控制器发送水泵暂停信号;
所述最低点匹配所述水仓内水位低点,所述最高点匹配所述水仓内水位高点。
结合第一方面,在一种可能的实现方式中,所述水位信号监测装置利用水仓内水面上升时水的向上漂浮作用力推动其上升;
所述水位信号监测装置利用水仓内水面下降时水的向上漂浮作用力和增加上浮力机构控制其下降;
所述水仓内水位低点距离水仓的仓底0.5cm~1.5cm,所述水仓内水位高点距离水仓的仓口1cm~2.5cm。
本公开实施例的水位低点距离仓底0.5cm~1.5cm,主要是考虑到水位为0(即仓内无水)时,丧失了对水位信号监测装置的向上漂浮作用力,极易导致水位信号监测装置卡死在水仓底部,引发水仓内水位上升时水位信号监测装置长时间滞留在水仓底部,无法准确及时的向控制器发送信号。本公开实施例的水位高点距离水仓的仓口1cm~2.5cm,主要是基于两方面考虑:一、水位信号监测装置向控制器发送信号、控制器控制水泵启动有个时间间隔,防止水量过大时水仓内水面迅速上升至仓口导致水溢出水仓,排水不及时;二、水位漫出水仓或者即将漫出水仓时,极易导致水位信号监测装置卡死在水仓仓口,引发水仓内水位下降时水位信号监测装置长时间滞留在水仓仓口,无法准确及时的向控制器发送信号。
结合一方面,在一种可能的实现方式中,所述水位信号监测装置包括固定在仓内的导向件、活动设置在所述导向件上方的移动机构、固定设置在所述导向件的上方并连接所述移动机构的增加上浮力机构;
所述移动机构在水面上升时利用水仓内水面上升时水的向上漂浮作用力推动其沿所述导向件上升,所述移动机构在水面下降时利用水的向上漂浮作用力和所述增加上浮力机构控制其沿所述导向件下降;
所述水仓内水位低点时所述移动机构的下表面距离水仓的仓底0.5cm~1.5cm,所述水仓内水位高点时所述移动机构的上表面距离水仓的仓口1cm~2.5cm;
所述增加上浮力机构在所述移动机构下降时向移动机构泵送气体增大所述移动机构的向上漂浮作用力。
结合一方面,在一种可能的实现方式中,所述水位信号监测装置还包括转换机构和缓冲机构;
所述转换机构连接所述移动机构,所述转换机构在移动机构向上浮动时将所述移动机构的竖向作用力转化为旋转作用力;
所述缓冲机构连接所述转换机构,所述缓冲机构在所述转换机构动作时控制所述水位信号监测装置向所述控制器发送信号的强弱。
本公开实施例的水面上升时移动机构在向上漂浮作用力作用下自动上移,水面下降时移动机构在向上漂浮作用力作用下自动下降,移动机构带动增加上浮力机构动作,不断向移动机构中充入气体,进一步提高向上漂浮作用力,实现水面越高浮动越精准;且在移动机构上浮的同时,借助转换机构带动缓冲机构动作,提前预知移动件即将到达最高点/最低点,根据报警信号的强弱检测水面的液差值,从而起到液差检测的功能。
结合一方面,在一种可能的实现方式中,还包括:设置于水泵出水管路上的逆止阀,所述逆止阀防止水泵排出的水回流。
另一方面,提供一种自动排水方法,包括:
水位信号监测装置随水仓内的水位上升而上移,直至所述水位信号监测装置运动到最高点时停止上移;
所述水位信号监测装置向控制器发送水泵启动信号;
所述控制器控制所述水泵排出水仓内水,水仓内的水位逐渐下降;
所述水位信号监测装置随水仓内的水位下降而下移,直至所述水位信号监测装置运动到最低点时停止下移;
所述水位信号监测装置向控制器发送水泵停止信号;
所述控制器控制所述水泵停止排水,水仓内的水位逐渐上升;
重复上述过程进行下一轮排水动作。
结合另一方面,在一种可能的实现方式中,所述水位信号监测装置随水仓内的水位上升而上移,包括:
水位信号监测装置的移动机构沿水位信号监测装置的导向件随水仓内水面上升而上移;
移动机构在水面上升时利用水仓内水面上升时水的向上漂浮作用力推动其沿导向件上升;
所述水位信号监测装置随水仓内的水位下降而下移,包括:
水位信号监测装置的移动机构沿水位信号监测装置的导向件随水仓内水面下降而下移;
移动机构在水面下降时利用水的向上漂浮作用力和水位信号监测装置的增加上浮力机构控制其沿导向件下降;
增加上浮力机构在移动机构下降时向移动机构泵送气体增大移动机构的向上漂浮作用力。
结合一方面,在一种可能的实现方式中,还包括:
在水泵排出水仓内水过程中逆止阀防止水泵排出的水回流。
在本公开中,至少具有如下技术效果或优点:
本公开的实施例通过采用自动排水方案,井下各临时排水点实现无人值守排水,既节省了人力资源又防止了积水溢出。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对本发明实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
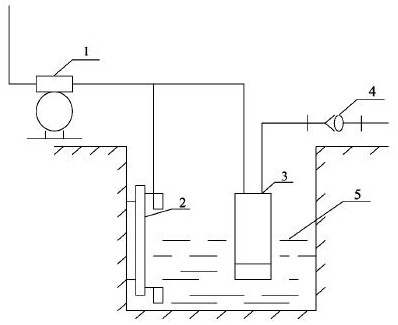
图1为根据本公开的一些实施例提供的自动排水系统示意图;
图2为根据本公开的一些实施例提供的水位信号监测装置安装在水仓结构示意图;
图3为根据本公开的一些实施例提供的自动排水方法流程图;
附图标记:1-控制器;2-水位信号监测装置;21-导向件;22-监测本体;23-移动件;24-漂浮件;25-浮力加强件;26-上浮力产生单元;27-空腔变化单元;28-上浮力转移单元;29-引出线;210-水位信号传输模块;3-水泵;4-逆止阀;5-水位;6-水仓。
具体实施方式
下面结合附图所示的各实施方式对本公开进行详细说明,但应当说明的是,这些实施方式并非对本公开的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本公开的保护范围之内。
请参阅图1和图2,本公开实施例提供了一种自动排水系统,包括:设置在水仓6内的水位信号监测装置2、放置在水仓6内的水泵3、与水泵3电连接的控制器1;控制器1与水位信号监测装置2和水泵3均连接;水位信号监测装置2随水仓6内的水位高低上下移动;水位信号监测装置2向控制器1发送水泵3启停信号,控制器1控制水泵3工作。
请继续参阅图1和图2,本公开实施例提供了一种自动排水系统,除了包括水位信号监测装置2、水泵3和控制器1之外,还包括:设置于水泵3出水管路上的逆止阀4,逆止阀4防止水泵3排出的水回流。请继续参阅图1,本公开实施例的自动排水系统包括控制器1、水位信号监测装置2、水泵3和逆止阀4。本公开实施例的水泵3优选为潜水泵3,当水位信号监测装置2探测到水仓6水位到达上水位点时,向控制器1发出信号,控制器1启动潜水泵3开始抽水;当水位信号监测装置2探测到水仓6水位降到下水位点时,又向控制器1发出信号,控制器1关闭潜水泵3电源,停止排水。逆止阀4用来防止排出之水回流。
在实际应用中,本发明实施例的水位信号监测装置2随水仓6内水位上升而上升,水位信号监测装置2运动到最高点时向控制器1发送水泵3启动信号;本发明实施例的水位信号监测装置2随水仓6内水位下降而下降,水位信号监测装置2运动到最低点时向控制器1发送水泵3暂停信号;最低点匹配水仓6内水位低点,最高点匹配水仓6内水位高点。
本发明实施例将最低点匹配水仓6内水位低点,最高点匹配水仓6内水位高点,水位信号监测装置2运动到最低点时水泵3停止转动,停止排出水仓6内水;水位信号监测装置2运动到最高点时水泵3开始转动,开始排出水仓6内水。
更具体地,水位信号监测装置2利用水仓6内水面上升时水的向上漂浮作用力推动水位信号监测装置2上升;水位信号监测装置2利用水仓6内水面下降时水的向上漂浮作用力和增加上浮力机构控制水位信号监测装置2下降;水仓6内水位低点距离水仓6的仓底0.5cm~1.5cm,水仓6内水位高点距离水仓6的仓口1cm~2.5cm。
本发明实施例的水位低点距离仓底0.5cm~1.5cm,主要是考虑到水位为0(即仓内无水)时,丧失了对水位信号监测装置2的向上漂浮作用力,极易导致水位信号监测装置2卡死在水仓6底部,引发水仓6内水位上升时水位信号监测装置2长时间滞留在水仓6底部,无法准确及时的向控制器1发送信号。本发明实施例的水位高点距离水仓6的仓口1cm~2.5cm,主要是基于两方面考虑:一、水位信号监测装置2向控制器1发送信号、控制器1控制水泵3启动有个时间间隔,防止水量过大时水仓6内水面迅速上升至仓口导致水溢出水仓6,排水不及时;二、水位漫出水仓6或者即将漫出水仓6时,极易导致水位信号监测装置2卡死在水仓6仓口,引发水仓6内水位下降时水位信号监测装置2长时间滞留在水仓6仓口,无法准确及时的向控制器1发送信号。
请继续参阅图2,本发明实施例的水位信号监测装置2包括固定在仓内的导向件21、活动设置在导向件21上方的移动机构、固定设置在导向件21的上方并连接移动机构的增加上浮力机构;移动机构在水面上升时利用水仓6内水面上升时水的向上漂浮作用力推动其沿导向件21上升,移动机构在水面下降时利用水的向上漂浮作用力和增加上浮力机构控制其沿导向件21下降;水仓6内水位低点时移动机构的下表面距离水仓6的仓底0.5cm~1.5cm,水仓6内水位高点时移动机构的上表面距离水仓6的仓口1cm~2.5cm;增加上浮力机构在移动机构下降时向移动机构泵送气体增大移动机构的向上漂浮作用力。
作为第一种实现方式,当水面上升时移动机构在向上漂浮作用力下自动上移,实现水面越高移动机构上浮越高;作为第二种实现方式,当水面上升时移动机构在向上漂浮作用力下自动上移,移动机构带动增加上浮力机构动作,增加上浮力机构不断向移动机构中充入气体,进一步提高向上漂浮作用力,进而更进一步实现水面越高移动机构上浮越稳定。
本公开实施例的水位信号监测装置2还包括转换机构和缓冲机构;转换机构连接移动机构,转换机构在移动机构向上浮动时将移动机构的竖向作用力转化为旋转作用力;缓冲机构连接转换机构,缓冲机构在转换机构动作时控制水位信号监测装置2向控制器1发送信号的强弱。
本公开实施例的水面上升时移动机构在向上漂浮作用力作用下自动上移,水面下降时移动机构在向上漂浮作用力作用下自动下降,移动机构带动增加上浮力机构动作,不断向移动机构中充入气体,进一步提高向上漂浮作用力,实现水面越高浮动越精准;且在移动机构上浮的同时,借助转换机构带动缓冲机构动作,提前预知移动件23即将到达最高点/最低点。
本公开实施例在移动机构上浮的同时,借助转换机构带动缓冲机构动作,提前预知移动件23即将到达最高点/最低点,从而起到水位提前预警的功能。
请继续参阅图2,本发明实施例的一种水位信号监测装置2,包括导向件21、移动机构、增加上浮力机构、转换机构、缓冲机构,导向件21固定在仓内的侧壁上;移动机构活动设置在导向件21的上方,在水面上升时向上漂浮将向上漂浮作用力转为驱动力;增加上浮力机构固定设置在导向件21的上方并连接移动机构,在移动机构下降时向移动机构泵入气体增大向上漂浮作用力提高移动机构运动稳定性; 转换机构连接移动机构,转换机构在移动机构向上浮动时将由移动机构提供的驱动力转化为转动力矩;缓冲机构连接转换机构,缓冲机构在转换机构动作时提前预知移动件23即将到达最高点/最低点。当水面上升时移动机构在向上漂浮作用力作用下自动上移,移动机构带动增加上浮力机构动作,不断向移动机构中充入气体,进一步提高向上漂浮作用力,实现水面越高浮动越精准;且在移动机构上浮的同时,借助转换机构带动缓冲机构动作,提前预知移动件23即将到达最高点/最低点。
请继续参阅图2,上述的移动机构包括移动件23、漂浮件24、浮力加强件25,移动件23竖直活动设置在导向件21的上方,在水仓6内水面高度增加或降低时移动件23自动上下运动;漂浮件24固定在移动件23的底端,漂浮件24推动移动件23上下运动;浮力加强件25固定在漂浮件24上,浮力加强件25增大漂浮件24同水仓6内水面之间的向上漂浮作用力;导向件21的上方竖直固定有同移动件23滑动套合的导向件21;本公开实施例通过导向件21对移动件23的上下移动轨迹进行约束,当水面高度增加时,利用漂浮件24和浮力加强件25的漂向上漂浮作用力带动移动件23沿导向件21竖直升降。
本公开实施例的增加上浮力机构包括上浮力产生单元26、空腔变化单元27和上浮力转移单元28,上浮力产生单元26通过监测本体22固定在导向件21上方,空腔变化单元27密封滑动设置在上浮力产生单元26内,上浮力转移单元28连通上浮力产生单元26上部与浮力加强件25。空腔变化单元27固定在移动件23的上端,上浮力产生单元26的下部开设有供移动件23穿过的通孔;当移动件23在漂浮件24和浮力加强件25的向上漂浮作用力作用下向上运动时带动空腔变化单元27沿上浮力产生单元26的内壁向上密封滑动,密封滑动的空腔变化单元27挤压上浮力产生单元26上部的空气通过上浮力转移单元28排入到浮力加强件25中,使得浮力加强件25进一步吹大,增加与水面的接触面积,从而增大向上漂浮作用力,保持移动的稳定性。当移动件23在漂浮件24和浮力加强件25的向上漂浮作用力作用下向下运动时带动空腔变化单元27沿上浮力产生单元26的内壁向下密封滑动,密封滑动的空腔变化单元27挤压上浮力产生单元26下部的空气通过上浮力转移单元28排入到浮力加强件25中,使得浮力加强件25反向吹大,增加与水面的接触面积,从而增大向上漂浮作用力,保持移动的稳定性。
本公开实施例的缓冲机构包括横向箱、螺纹传动单元和横向移动单元,横向箱水平固定安装在移动件23上;螺纹传动单元连接滚轮连接件,螺纹传动单元在滚轮连接件转动时通过螺纹力输出直线力矩;横向移动单元设置在横向箱的上方并连接螺纹传动单元,横向移动单元在螺纹传动单元输出直线力矩时调节电力信号;当滚轮连接件转动时带动螺纹传动单元动作,从而输出直线力矩,由直线力矩驱动横向移动单元动作,从而调节电路的电流和/或电压信号,从而反应水面即将到达最高点和/或最低点。
本公开实施例的螺纹传动单元包括:丝杠、旋转联动件和内螺纹筒,丝杠转动设置在横向箱上,旋转联动件连接丝杠与滚轮连接件,内螺纹筒螺纹连接在丝杠上,内螺纹筒还连接横向移动单元;在实际使用中,采用转动的滚轮连接件借助旋转联动件带动丝杠转动,丝杠利用螺纹配合的螺旋升力驱动内螺纹筒带动横向移动单元动作,从而调节电流和/或电压信号。
本公开实施例的横向移动单元包括滑动变阻器、滑片连接件和引出线29,滑动变阻器固定在横向箱上方,滑动变阻器还与丝杠平行,滑片连接件滑动设置在滑动变阻器上,滑片连接件同内螺纹筒固定,滑动变阻器的一端与滑片连接件通过引出线29连接;本公开实施例的横向移动单元作为滑动变阻器的滑动变阻功能,通过内螺纹筒带动滑片连接件沿滑动变阻器滑动,对水位信号监测装置2内部的电阻进行调节,从而实现对电流和/或电压信号调节。
请参阅图3,本公开实施例还提供了一种自动排水方法,包括:重复下述过程不断进行排水动作;一个循环的排水动作过程如下:水位信号监测装置随水仓内的水位上升而上移,直至水位信号监测装置运动到最高点时停止上移;水位信号监测装置向控制器发送水泵启动信号;控制器控制水泵排出水仓内水,水仓内的水位逐渐下降;水位信号监测装置随水仓内的水位下降而下移,直至水位信号监测装置运动到最低点时停止下移;水位信号监测装置向控制器发送水泵停止信号;控制器控制水泵停止排水,水仓内的水位逐渐上升。
本公开实施例的水位信号监测装置随水仓内的水位上升而上移,包括:水位信号监测装置的移动机构沿水位信号监测装置的导向件随水仓内水面上升而上移;移动机构在水面上升时利用水仓内水面上升时水的向上漂浮作用力推动其沿导向件上升。本公开实施例的水位信号监测装置随水仓内的水位下降而下移,包括:水位信号监测装置的移动机构沿水位信号监测装置的导向件随水仓内水面下降而下移;移动机构在水面下降时利用水的向上漂浮作用力和水位信号监测装置的增加上浮力机构控制其沿导向件下降;增加上浮力机构在移动机构下降时向移动机构泵送气体增大移动机构的向上漂浮作用力。
本公开实施例的水位信号监测装置,移动机构在水面上升时向上漂浮将向上漂浮作用力转为驱动力,增加上浮力机构在移动机构下降时向移动机构泵入气体增大向上漂浮作用力提高移动机构运动稳定性,转换机构在移动机构向上浮动时将由移动机构提供的驱动力转化为转动力矩,缓冲机构在转换机构动作时提前预知移动件即将到达最高点/最低点。当水面上升时移动机构在向上漂浮作用力作用下自动上移,移动机构带动增加上浮力机构动作,不断向移动机构中充入气体,进一步提高向上漂浮作用力,实现水面越高浮动越精准;在移动机构上浮的同时,借助转换机构带动缓冲机构动作,提前预知移动件即将到达最高点/最低点。
本公开实施例的水位信号监测装置,在水仓内水面高度增加或降低时移动件自动上下运动;漂浮件推动移动件上下运动;浮力加强件固定在漂浮件上,浮力加强件增大漂浮件同水仓内水面之间的向上漂浮作用力;本公开实施例的导向件对移动件上下移动轨迹进行约束,当水面高度增加时,利用漂浮件和浮力加强件的漂向上漂浮作用力带动移动件沿导向件竖直升降。
本公开实施例的水位信号监测装置,当移动件在漂浮件和浮力加强件的向上漂浮作用力作用下向上运动时带动空腔变化单元沿上浮力产生单元的内壁向上密封滑动,密封滑动的空腔变化单元挤压上浮力产生单元上部的空气通过上浮力转移单元排入到浮力加强件中,使得浮力加强件进一步吹大,增加与水面的接触面积,从而增大向上漂浮作用力,保持移动的稳定性。当移动件在漂浮件和浮力加强件的向上漂浮作用力作用下向下运动时带动空腔变化单元沿上浮力产生单元的内壁向下密封滑动,密封滑动的空腔变化单元挤压上浮力产生单元下部的空气通过上浮力转移单元排入到浮力加强件中,使得浮力加强件反向吹大,增加与水面的接触面积,从而增大向上漂浮作用力,保持移动的稳定性。
本公开实施例的水位信号监测装置,螺纹传动单元在滚轮连接件转动时通过螺纹力输出直线力矩,横向移动单元在螺纹传动单元输出直线力矩时调节电力信号,当滚轮连接件转动时带动螺纹传动单元动作,从而输出直线力矩,由直线力矩驱动横向移动单元动作,从而调节电路的电流和/或电压信号,从而反应水面即将到达最高点和/或最低点。
本公开实施例的水位信号监测装置,采用转动的滚轮连接件借助旋转联动件带动丝杠转动,丝杠利用螺纹配合的螺旋升力驱动内螺纹筒带动横向移动单元动作,从而调节电流和/或电压信号。
本公开实施例的水位信号监测装置,横向移动单元作为滑动变阻器的滑动变阻功能,通过内螺纹筒带动滑片连接件沿滑动变阻器滑动,对水位信号监测装置内部的电阻进行调节,从而实现对电流和/或电压信号调节。
本公开的实施例通过采用自动排水方案,井下各临时排水点实现无人值守排水,既节省了人力资源又防止了积水溢出。
上文所列出的一系列的详细说明仅仅是针对本公开的可行性实施方式的具体说明,它们并非用以限制本公开的保护范围,凡未脱离本公开技艺精神所作的等效实施方式或变更均应包含在本公开的保护范围之内。
对于本领域技术人员而言,显然本公开不限于上述示范性实施例的细节,而且在不背离本公开的精神或基本特征的情况下,能够以其他的具体形式实现本公开。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本公开的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本公开内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种建筑自动化排水系统及施工方法
- 一种集水井微机控制强排水系统及排水效果自动检测方法