一种腹腔镜手术机器人
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及医疗机器人技术领域,具体涉及一种适用于腹腔镜手术的带有分布式控制系统的机器人。
背景技术
腹腔镜手术与传统手术相比,具有创伤小、疼痛轻、恢复快等优点,深受患者欢迎。在实施腹腔镜手术时,需要切换多种手术机械,施术者依赖其他人员的协助,且长时间手持机械进行精细操作会对医生带来较大负担。
手术机器人能有效降低人员协同的需求,降低医生的操作疲劳,同时能保证操作的平稳性和精度,在临床医疗中具备极大的应用价值。因此,针对腹腔镜手术涉及一种能够减轻医生疲劳程度、降低对人员协同的依赖、提升手术质量的腹腔镜手术机器人很有必要。
发明内容
本发明的目的是提供一种能够减轻医生疲劳程度、降低对人员协同的依赖、提升手术质量的腹腔镜手术机器人。
为达到上述目的,本发明采用的技术方案是:
一种腹腔镜手术机器人,包括机器人动作实体和用于控制所述机器人动作实体的分布式控制系统;
所述机器人动作实体包括多个执行机器人和一个主操作机器人;所述执行机器人包括执行侧可移动基座、设置于所述执行侧可移动基座上且具有多自由度的机械臂,所述执行侧可移动基座内安装有执行侧计算机工作站,所述机械臂的自由端安装有各类手术器械,所述手术器械包括操作类器械和感知类器械;所述主操作机器人包括操作侧可移动基座、设置于所述操作侧可移动基座上的操作主手和设置于所述操作侧可移动基座上的显示器,所述操作侧可移动基座内安装有操作侧计算机工作站,所述显示器用于提供交互界面而供选择被控机械臂、基于图像信号显示所述感知类器械所采集的图像和进行异常告警,所述被控机械臂为所述操作主手所控制的所述机械臂;
所述分布式控制系统包括部署在所述操作侧计算机工作站中的主控制程序、分别部署在各个所述执行侧计算机工作站中的执行程序,所述主控制程序与所述执行程序通信连接,所述操作主手与所述主控制程序通信连接,所述机械臂与其所在所述执行机器人对应的执行程序通信连接,所述感知类器械与其所在所述执行机器人对应的执行程序通信连接;
所述主控制程序用于在选择所述被控机械臂后发送选中信号给所述被控机械臂所在所述执行机器人对应的所述执行程序、获取所述操作主手的动作状态参数、获取所述被控机械臂所在所述执行机器人对应的所述执行程序上传的所述被控机械臂的当前状态参数、基于所述操作主手的动作状态参数和所述被控机械臂的当前状态参数计算所述被控机械臂对应的目标状态参数并生成控制指令、下达所述控制指令给所述被控机械臂所在所述执行机器人对应的所述执行程序、获取所述感知类器械所在所述执行机器人对应的所述执行程序上传的图像流信号并转换为所述图像信号后传输给所述显示器、接收所述被控机械臂所在所述执行机器人对应的所述执行程序上传的机械臂异常信号并进行异常处理;
所述执行程序用于接收所述主控制程序发送的所述选中信号、获取对应所述机械臂的当前状态参数并上传至所述主控制程序、基于接收到的所述控制指令控制所述机械臂动作、监控所述机械臂动作是否异常并在异常时上传所述机械臂异常信号至所述主控制程序、配合所述主控制程序进行异常处理,所述感知类器械所在所述执行机器人对应的所述执行程序还用于获取所述感知类器械所采集的图像并生成所述图像流信号后上传至所述主控制程序。
所述主控制程序包括操作侧控制模块、操作侧会话模块、视图模块和操作侧安全模块,所述操作侧控制模块分别与所述操作侧会话模块、所述操作侧安全模块信号连接,所述视图模块、所述操作侧安全模块均与所述操作侧会话模块信号连接,所述操作主手、所述显示器均与所述操作侧控制模块信号连接;
所述执行程序包括执行侧控制模块、执行侧会话模块、采集模块和执行侧安全模块,所述执行侧控制模块分别与所述执行侧会话模块、所述执行侧安全模块信号连接,所述采集模块、所述执行侧安全模块均与所述执行侧安全模块信号连接,所述机械臂与所述执行侧控制模块相连接,所述感知类器械与所述采集模块信号连接;
所述操作侧会话模块与所述执行侧会话模块通信连接。
所述分布式控制系统控制所述机器人动作实体实现器械操作的方法为:所述被控机械臂所在执行机器人对应的所述执行程序获取所述被控机械臂的当前状态参数并上传至所述主控制程序,所述主控制程序获取所述操作主手的动作状态参数和所述被控机械臂的当前状态参数后,基于所述操作主手的动作状态参数和所述被控机械臂的当前状态参数计算所述被控机械臂对应的目标状态参数并生成控制指令,所述主控制程序下达所述控制指令给所述被控机械臂所在所述执行机器人对应的所述执行程序,所述被控机械臂所在所述执行机器人接收所述控制指令并基于所述控制指令控制所述机械臂动作。
所述主控制程序按照设定的控制周期生成所述控制指令,并通过控制每个所述控制周期中所述被控机械臂的运动终点位置而控制所述被控机械臂的移动轨迹。
所述操作主手的动作状态参数P
所述分布式控制系统控制选择所述被控机械臂的方法为:在所述显示器上为所述操作主手选择所述被控机械臂,所述主控制程序发送选中信号给所述被控机械臂所在所述执行机器人对应的所述执行程序,所述被控机械臂所在所述执行机器人对应的所述执行程序接收所述选中信号后,获取所述被控机械臂的当前状态参数并上传至所述主控制程序,从而所述主控制程序与所述被控机械臂所在执行机器人对应的所述执行程序之间建立控制链路。
所述机械臂配置有RTDE控制接口,所述执行程序通过所述RTDE控制接口获取所述机械臂的当前状态参数或控制所述机械臂运动。
所述分布式控制系统控制实现图像显示的方法为:所述感知类器械所在所述执行机器人对应的所述执行程序获取所述感知类器械所采集的图像,将所述图像处理为所述图像流信号后上传至所述主控制程序,所述主控制程序获取所述图像流信号并将其转换为所述图像信号后传输给所述显示器,所述显示器基于所述图像信号显示所述感知类器械所采集的图像。
所述执行机器人的所述执行侧可移动基座内安装有视频采集卡,所述视频采集卡分别与所述感知类器械、所述执行侧计算机工作站信号连接,所述视频采集卡用于采集所述感知类器械所采集的图像并传输给所述执行程序的采集模块。
所述执行程序对所述感知类器械所采集的图像进行编码、增益处理后成为所述图像流信号。
所述分布式控制系统进行异常处理的方法为:设置标识符,所述标识符为T或F;当所述机械臂无异常时,所述标识符为T,当所述机械臂动作异常时,所述标识符为F;当所述标识符为F时,所述执行程序控制所述机械臂停止运动并上传所述机械臂异常信号至所述主控制程序,所述主控制程序接收所述机械臂异常信号并停止用户操作且通过所述显示器进行异常告警。
所述执行程序接收所述控制指令并缓存在指令队列中,当所述标识符为T时,所述执行程序中由子线程依次执行所述指令队列中的所述控制指令,当所述标识符为F时,子线程停止执行所述指令队列中的所述控制指令,当所述标识符恢复为T时,清空所述指令队列中的所述控制指令。
所述分布式控制系统启动时,所述主控制程序与各个所述执行程序建立通信链路并定期检测所述通信链路是否正常连接。
所述主控制程序与各个所述执行程序建立通信链路的方法为:所述主控制程序启动后创建TCP套接字,等待所述执行程序连接;所述执行程序启动后创建TCP套接字并向所述主控制程序发起连接请求,从而在所述主控制程序与所述执行程序之间建立TCP连接。
检测所述通信链路是否正常连接的方法为:所述主控制程序和各个所述执行程序之间定期发动心跳报文;若所述主控制程序未检测到所述执行程序发送的所述心跳报文,则停止用户操作并通过所述显示器进行异常告警;若所述执行程序未检测到所述主控制程序发送的所述心跳报文,则尝试与所述主控制程序之间重新建立所述通信链路。
由于上述技术方案运用,本发明与现有技术相比具有下列优点:本发明能够使医生方便地控制和切换多种手术器械,能够减轻医生疲劳程度、提高医生专注度,还可以降低对人员协同的依赖,降低医疗人力资源的负担,提升手术质量。
附图说明
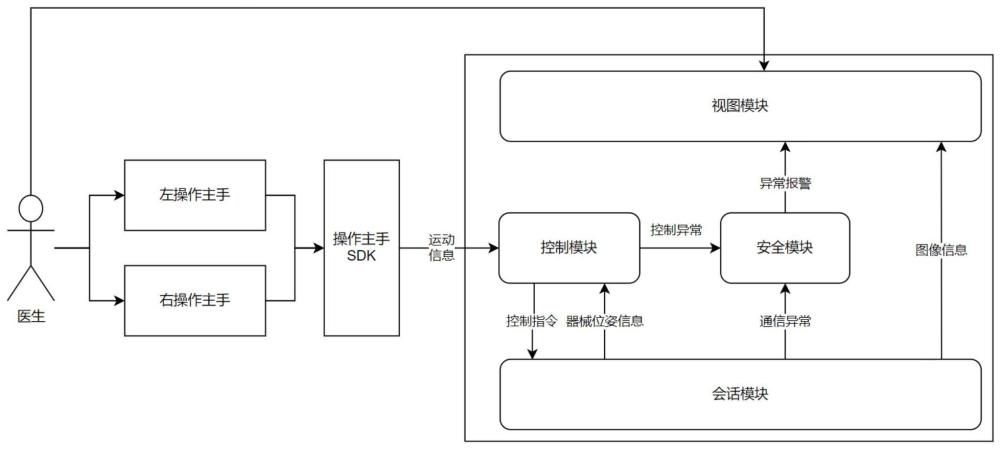
附图1为本发明的腹腔镜手术机器人中主控制程序的架构及设备连接交互示意图。
附图2为本发明的腹腔镜手术机器人中执行程序的架构及设备连接交互示意图。
具体实施方式
下面结合附图所示的实施例对本发明作进一步描述。
实施例一:一种腹腔镜手术机器人,包括机器人动作实体和分布式控制系统。
机器人动作实体包括:
(1)多个执行机器人。执行机器人设置在病人侧/执行侧,每个执行机器人包括执行侧可移动基座和机械臂。通过执行侧基座,可将执行机器人方便地移动至合适的位置而实施手术,执行侧可移动基座内安装有执行侧计算机工作站。机械臂设置于执行侧可移动基座上,其具有多自由度。本实施例中,机械臂具有六自由度。机械臂的自由端可以根据手术需要而可拆卸地安装有各类手术器械,包括操作类器械(如钳子、消融针等)和感知类器械(B超探头、腹腔镜等)。对于挂载感知类器械的执行机器人,其执行侧可移动基座内安装有视频采集卡,视频采集卡分别与感知类器械、执行侧计算机工作站信号连接,视频采集卡用于采集和传输感知类器械(B超探头、腹腔镜等)所采集的图像。
(2)一个主操作机器人。主操作机器人设置在医生侧/操作侧,主操作机器人包括操作侧可移动基座、两个操作主手和显示器。通过操作侧可移动基座,可将主操作机器人方便地移动至合适的位置以供医生操作,操作侧可移动基座内安装有操作侧计算机工作站。操作主手设置于操作侧可移动基座上,其对应于左右手而供医生操作以实施手术。显示器设置于操作侧可移动基座上,其用于提供交互界面而供选择被控机械臂、基于图像信号显示感知类器械所采集的图像和进行异常告警。其中,被控机械臂定义为操作主手所能够控制的机械臂,可以根据术中需要进行选择切换。
分布式控制系统是一套软件系统,用于控制机器人动作实体动作以完成各种功能,其包括主控制程序和分别部署在各个执行侧计算机工作站中的执行程序,主控制程序与执行程序通信连接。
(1)主控制程序:其部署在主操作机器人的操作侧计算机工作站中,操作主手、显示器均与主控制程序通信连接。
主控制程序用于在选择被控机械臂后发送选中信号给被控机械臂所在执行机器人对应的执行程序、获取操作主手的动作状态参数、获取被控机械臂所在执行机器人对应的执行程序上传的被控机械臂的当前状态参数、基于操作主手的动作状态参数和被控机械臂的当前状态参数计算被控机械臂对应的目标状态参数并生成控制指令、下达控制指令给被控机械臂所在执行机器人对应的执行程序、获取感知类器械所在执行机器人对应的执行程序上传的图像流信号并转换为图像信号后传输给显示器、接收被控机械臂所在执行机器人对应的执行程序上传的机械臂异常信号并进行异常处理;
(2)执行程序,其分别部署各个执行机器人的执行侧计算机工作站中,机械臂与其所在执行机器人对应的执行程序通信连接,感知类器械与其所在执行机器人对应的执行程序通信连接。
执行程序用于接收主控制程序发送的选中信号、获取对应机械臂的当前状态参数并上传至主控制程序、基于接收到的控制指令控制机械臂动作、监控机械臂动作是否异常并在异常时上传机械臂异常信号至主控制程序、配合主控制程序进行异常处理,感知类器械所在执行机器人对应的执行程序还用于获取感知类器械所采集的图像并生成图像流信号后上传至主控制程序。
主控制程序包括以下子模块:
操作侧控制模块:用于在选择被控机械臂后经操作侧会话模块发送选中信号给被控机械臂所在执行机器人对应的执行程序、获取操作主手的动作状态参数、经操作侧会话模块获取被控机械臂的当前状态参数、基于操作主手的动作状态参数和被控机械臂的当前状态参数计算被控机械臂对应的目标状态参数并生成控制指令、经操作侧会话模块下达控制指令给被控机械臂所在执行机器人对应的执行程序、经操作侧会话模块接收被控机械臂所在执行机器人对应的执行程序上传的机械臂异常信号;
操作侧会话模块:与执行程序建立网络通信连接,传输网络信息,监测网络异常;
视图模块:提供交互界面,经操作侧会话模块获取感知类器械所在执行机器人对应的执行程序上传的图像流信号并转换为图像信号后传输给显示器,显示控制面板;
操作侧安全模块:进行异常处理。
操作侧控制模块分别与操作侧会话模块、操作侧安全模块信号连接,视图模块、操作侧安全模块均与操作侧会话模块信号连接,操作主手、显示器均与操作侧控制模块信号连接。
执行程序包括以下子模块:
执行侧控制模块:用于经执行侧会话模块接收主控制程序发送的选中信号、获取对应机械臂的当前状态参数并经执行侧会话模块上传至主控制程序、经执行侧会话模块接收主控制程序下达的控制指令并基于接收到的控制指令控制机械臂动作、监控机械臂动作是否异常并在异常时经执行侧会话模块上传机械臂异常信号至主控制程序、
执行侧会话模块:与主控制程序程序建立网络通信连接,传输网络信息,监测网络异常;
采集模块:获取感知类器械所采集的图像并生成图像流信号后经执行侧会话模块上传至主控制程序。
执行侧安全模块:配合主控制程序进行异常处理。
执行侧控制模块分别与执行侧会话模块、执行侧安全模块信号连接,采集模块、执行侧安全模块均与执行侧安全模块信号连接,机械臂与执行侧控制模块相连接,感知类器械与采集模块信号连接。
操作侧会话模块与执行侧会话模块通信连接。
上述分布式控制系统启动时,主控制程序与各个执行程序建立通信链路并定期检测通信链路是否正常连接。
主控制程序和各个执行程序通过由交换机、网线组成的局域网进行网络连接。主控制程序与各个执行程序建立通信链路的方法为:主控制程序启动后创建TCP套接字,等待执行程序连接;执行程序启动后创建TCP套接字并向主控制程序发起连接请求,从而在主控制程序与执行程序之间建立TCP连接。以下所述的所有数据传输,都由会话模块通过此TCP连接进行。
检测通信链路是否正常连接的方法为:主控制程序和各个执行程序之间定期发动心跳报文。在主控制程序中,若主控制程序未检测到执行程序发送的心跳报文,通知操作侧安全模块设备掉线,则停止用户操作并通过显示器进行异常告警。在执行程序中,若执行程序未检测到主控制程序发送的心跳报文,则尝试与主控制程序之间重新建立通信链路(重新建立网络连接)。
分布式控制系统控制实现图像显示的方法为:感知类器械所在执行机器人对应的执行程序获取感知类器械所采集的图像,将图像处理为图像流信号后上传至主控制程序,主控制程序获取图像流信号并将其转换为图像信号后传输给显示器,显示器基于图像信号显示感知类器械所采集的图像。具体的,感知类器械所采集的图像经由视频采集卡传输给执行程序的采集模块,执行程序的采集模块对感知类器械所采集的图像进行编码、增益处理后成为JPEG格式的字节流,即图像流信号,经由执行侧会话模块上传至主控制程序。在主操作机器人中,主控制程序的操作侧会话模块接收图像流信号并传输至视图模块中进行解码,最终将图像显示在主操作机器人的显示器上。
分布式控制系统控制机器人动作实体实现器械操作的方法为:主控制程序的视图模块在显示器上提供交互界面,医生在交互界面上可以选择两个操作主手分别要操控的执行机器人,即选择被控机械臂。分布式控制系统控制选择被控机械臂的方法为:在显示器上为操作主手选择被控机械臂,主控制程序经会话模块发送选中信号给被控机械臂所在执行机器人对应的执行程序,被控机械臂所在执行机器人对应的执行程序接收选中信号后,获取被控机械臂的当前状态参数并上传至主控制程序,从而主控制程序与被控机械臂所在执行机器人对应的执行程序之间建立控制链路。需要操控执行机器人时,被控机械臂所在执行机器人对应的执行程序获取被控机械臂的当前状态参数并上传至主控制程序,主控制程序获取操作主手的动作状态参数和被控机械臂的当前状态参数后,基于操作主手的动作状态参数和被控机械臂的当前状态参数计算被控机械臂对应的目标状态参数并生成控制指令,主控制程序下达控制指令给被控机械臂所在执行机器人对应的执行程序,被控机械臂所在执行机器人接收控制指令并基于控制指令控制机械臂动作。
上述器械操作中,主控制程序按照设定的控制周期生成控制指令,并通过控制每个控制周期中被控机械臂的运动终点位置而控制被控机械臂的移动轨迹。
具体的,操作主手的动作状态参数P
上述方案中,每个单独的控制指令控制机械臂的运动终点,通过连续的控制指令,刻画整个运动过程。当主控制程序以一定频率采样操作主手的P
对于机械臂,其配置有RTDE控制接口,则执行程序通过RTDE控制接口获取机械臂的当前状态参数或控制机械臂运动。对于操作主手,通过其SDK提供的接口来获取其动作状态参数P
分布式控制系统进行异常处理的方法为:设置标识符,标识符为T或F;当机械臂无异常时,标识符为T,当机械臂动作异常时,标识符为F。主控制程序发给执行程序的控制指令,由执行程序的执行侧控制模块执行,执行程序的执行侧控制模块接收到控制指令并缓存在指令队列中,当标识符为T时,执行程序中由子线程t依次执行指令队列中的控制指令。执行程序通过RTDE控制接口控制机械臂,RTDE控制接口提供了停止运动的接口,从而调用RTDE控制接口的停止运动接口,并设置标识符为F,此时子线程t停止执行指令队列中的控制指令。执行侧控制模块还提供了恢复运动接口,当异常排除时,标识符恢复为T,同时清空指令队列中的控制指令,使得子线程t恢复执行动作指令。当标识符为F时进行异常处理,执行程序的执行侧安全模块调用停止运动接口而控制机械臂停止运动,并上传机械臂异常信号至主控制程序,主控制程序接收机械臂异常信号并停止用户操作且通过显示器进行异常告警。当用户确认异常已经排除,则可以在主控制程序中由视图模块提供的交互界面上确认继续手术,主控制程序通知执行程序异常恢复,后者的执行侧安全模块调用执行侧控制模块的恢复运动接口而继续执行动作指令。对于操作主手,其SDK可以设计三个功能是:获取主操作主手的运动状态、挂起操作主手以阻止用户控制、恢复操作主手控制。基于此,操作侧控制模块可以读取主手操作的运动状态、挂起和恢复主操作手。主控制程序的操作侧安全模块进行异常处理时,调用操作侧控制模块,使其挂起操作主手,并停止读操作主手的运动状态,阻止用户进一步运动,还会通知操作侧会话模块,丢弃所有未发送的运动指令。操作侧安全模块还会通知执行程序的执行侧安全模块,停止执行已到达的运动指令,停止的方式前所述。
主控制程序的安全模块,还会通过视图模块向用户告警,当用户确认异常已经排除,可在主控制程序的交互界面上确认继续手术,主控制程序通知执行程序异常恢复,恢复的方式如(1)所述,主控制程序安全模块通知会话模块可继续发送运动指令,通知控制模块恢复主操作手控制并恢复读取主操作手运动状态。
本方案使医生能通过主手控制多种器械,主手易于握持、质量轻盈、移动顺滑,即使长时间操作对医生的负担也较小,能降低医生疲劳,提高医生专注度。此外,医生使用所述系统能方便地切换主手要控制的器械,降低对人员协同的依赖,降低医疗人力资源的负担。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
- 一种腹腔镜手术机器人用戳卡机构及腹腔镜手术机器人
- 一种腹腔镜手术机器人同构主手及腹腔镜手术机器人