具有关节运动和不对称可变形末端的外科缝合端部执行器部件
文献发布时间:2023-06-19 10:03:37
背景技术
内窥镜式外科器械可包括位于端部执行器和由临床医生操纵的柄部部分之间的轴。此种轴可使得能够穿过套管针插入到期望的深度并围绕轴的纵向轴线旋转,从而有利于端部执行器定位在患者体内。还可通过包括一个或多个关节运动接头或特征部而进一步有利于定位该端部执行器,使得端部执行器能够选择性地进行关节运动或者以其他方式相对于轴的纵向轴线偏转。
内窥镜式外科器械的示例包括外科缝合器。一些此类缝合器能够操作以夹紧组织层,切穿夹持的组织层,并且将钉驱动穿过组织层,以在组织层的切断端部附近将切断的组织层基本上密封在一起。在以下专利中公开了仅示例性的外科缝合器:2008年6月3日公布的名称为“Articulating Surgical Stapling Instrument Incorporating a Two-PieceE-Beam Firing Mechanism”的美国专利7,380,696;2013年4月2日公布的名称为“SurgicalStapling Instrument with An Articulatable End Effector”的美国专利8,408,439;和2013年6月4日公布的名称为“Motor-Driven Surgical Cutting Instrument withElectric Actuator Directional Control Assembly”的美国专利8,453,914。上面所引用的美国专利和美国专利公布中的每一者的公开内容以引用方式并入本文。
外科缝合器也可用于开放式手术和/或其他非内窥镜式手术中。仅以举例的方式,在胸廓外科手术中,外科缝合器可通过胸廓切开术插入,并由此位于患者肋骨之间以到达一个或多个器官,该胸廓外科手术不使用套管针作为缝合器的导管。例如,在从胸腔中移除器官之前,可通过缝合器来切断并闭合通向器官的血管。当然,外科缝合器可用于各种其他情况和手术中。
虽然已制造和使用各种外科缝合器械和相关联的部件,但据信在本发明人之前还无人制造或使用在所附权利要求中所描述的发明。
附图说明
并入本说明书中并构成本说明书的一部分的附图示出了本发明的实施方案,并且与上面给出的本发明的一般描述以及下面给出的实施方案的详细描述一起用于解释本发明的原理。
图1示出了第一示例性外科缝合器械的透视图;
图2示出了具有第一示例性端部执行器的图1的器械的侧视图;
图3示出了处于打开构型的图1的器械的端部执行器的透视图;
图4A示出了图3的端部执行器沿图3的线4-4截取的侧剖视图,其中击发梁处于近侧位置;
图4B示出了图3的端部执行器沿图3的线4-4截取的侧剖视图,其中击发梁处于远侧位置;
图5示出了图3的端部执行器沿图3的线5-5截取的端部剖视图;
图6示出了图3的端部执行器的分解透视图;
图7示出了图3的端部执行器被定位在组织处并已在组织中被致动了一次的透视图;
图8示出了包括成角度仓和具有末端的成角度砧座的第二示例性端部执行器的透视图;
图9示出了图8的端部执行器的放大侧视图;
图10示出了图8的端部执行器的放大顶视图;
图11示出了包括第三示例性端部执行器和第一示例性放置末端的第二示例性外科缝合器械的透视图,其中上钳口和下钳口处于打开构型;
图12A示出了处于第一成角度位置的图11的端部执行器的放大顶视图;
图12B示出了处于第二成角度位置的图11的端部执行器的放大顶视图;
图12C示出了处于第三成角度位置的图11的端部执行器的放大顶视图;
图12D示出了处于第四成角度位置的图11的端部执行器的放大顶视图;
图12E示出了处于第五成角度位置的图11的端部执行器的放大顶视图;
图13A示出了在进入组织开口之前的图11的端部执行器的放大透视图;
图13B示出了侧向运动到第二位置从而进入图13A的组织开口的图11的端部执行器的透视图;
图13C示出了已经穿过图13A的组织开口侧向运动到第三位置的图11的端部执行器的透视图;并且
图13D示出了在侧向运动穿过图13A的组织开口之后朝远侧运动到第四位置的图11的端部执行器的透视图。
附图并非旨在以任何方式进行限制,并且设想本发明的各种实施方案可以多种其他方式来执行,包括那些未必在附图中示出的方式。并入本说明书中并构成其一部分的附图示出了本发明的若干方面,并与说明书一起用于解释本发明的原理;然而,应当理解,本发明并不限于所示出的明确布置方式。
具体实施方式
下面对本技术的某些示例的说明不应用于限制本技术的范围。从下面的描述而言,本技术的其他示例、特征、方面、实施方案和优点对于本领域的技术人员而言将变得显而易见,下面的描述以举例的方式进行,这是为实现本技术所设想的最好的方式中的一种方式。正如将意识到的,本文所述的技术能够具有其他不同的和明显的方面,所有这些方面均不脱离本技术。因此,附图和说明应被视为实质上是例示性的而非限制性的。
另外应当理解,本文所述的教导内容、表达方式、实施方案、示例等中的任何一者或多者可与本文所述的其他教导内容、表达方式、实施方案、示例等中的任何一者或多者相结合。因此,下述教导内容、表达方式、实施方案、实施例等不应视为彼此孤立。鉴于本文的教导内容,本文的教导内容可进行组合的各种合适方式对于本领域的普通技术人员将是显而易见的。此类修改和变型旨在包括在权利要求书的范围内。
为公开内容的清楚起见,术语“近侧”和“远侧”在本文中相对于外科器械的人或机器人操作者而定义。术语“近侧”是指更靠近外科器械的人或机器人操作者并且更远离外科器械的外科端部执行器的元件位置。术语“远侧”是指更靠近外科器械的外科端部执行器并且更远离外科器械的人或机器人操作者的元件位置。此外,术语“上”、“下”、“侧向”、“横向”、“底部”、“顶部”为相对术语,以向下面所提供的图描述提供附加清晰度。因此,术语“上”、“下”、“侧向”、“横向”、“底部”“顶部”不旨在不必要地限制本文所述的本发明。
此外,术语“第一”和“第二”在本文中用于区分外科器械的一个或多个部分。例如,第一组件和第二组件可另选地且分别被描述为第二组件和第一组件。术语“第一”和“第二”以及其他数字名称仅为此类术语的示例,并非旨在不必要地限制本文所述的本发明。
图1至图7示出了第一示例性外科缝合和切断器械(10),其尺寸被设定成穿过套管针插管或切口(例如,胸廓切开术等)插入患者的外科部位以执行外科手术。本示例的器械(10)包括连接到轴(22)的柄部部分(20),该轴在远侧终止于关节运动接头(11),该关节运动接头进一步与第一示例性端部执行器(12)联接。轴(22)可根据以下美国专利的教导内容中的至少一些教导内容来构造:2017年10月24日公布的名称为“Surgical Instrumentwith Multi-Diameter Shaft”的美国专利9,795,379,该专利的公开内容以引用方式并入本文。
一旦关节运动接头(11)和端部执行器(12)穿过套管针的插管通道插入,关节运动接头(11)就可通过关节运动控件(13)进行远程关节运动,如图1中以虚像所描绘的,使得端部执行器(12)可从轴(22)的纵向轴线(LA)以所需角度(α)偏转。关节运动接头(11)和/或关节运动控件(13)可根据以下美国专利的教导内容中的至少一些教导内容来构造和操作:2015年11月17日公布的名称为“Surgical Instrument End Effector ArticulationDrive with Pinion and Opposing Racks”的美国专利9,186,142,该专利的公开内容以引用方式并入本文。和/或美国专利9,795,379,该专利的公开内容以引用方式并入本文。
本示例的端部执行器(12)包括下钳口(16)和可枢转砧座(18)。下钳口(16)可根据以下美国专利的教导内容中的至少一些教导内容来构造:2017年11月7日公布的名称为“Installation Features for Surgical Instrument End Effector Cartridge”的美国专利9,808,248,该专利的公开内容以引用方式并入本文。砧座(18)可根据以下美国专利的教导内容中的至少一些教导内容来构造:2016年12月13日公布的名称为“IntegratedTissue Positioning and Jaw Alignment Features for Surgical Stapler”的美国专利9,517,065,该专利的公开内容以引用方式并入本文;2017年12月12日公布的名称为“JawClosure Feature for End Effector of Surgical Instrument”的美国专利9,839,421,该专利的公开内容以引用方式并入本文;和/或2014年8月28日公布的名称为“StapleForming Features for Surgical Stapling Instrument”的美国公布2014/0239037,该公布的公开内容以引用方式并入本文。
柄部部分(20)包括手枪式握把(24)和闭合触发器(26)。闭合触发器26能够朝着手枪式握把(24)枢转,以使得砧座(18)朝着端部执行器(12)的下钳口(16)夹紧或闭合。砧座(18)的此类闭合是通过闭合管(32)和闭合环(33)提供的,这两者均响应于闭合触发器(26)相对于手枪式握把(24)的枢转而相对于柄部部分(20)纵向地平移。闭合管(32)沿轴(22)的长度延伸;并且闭合环(33)定位在关节运动接头(11)的远侧。关节运动接头(11)能够操作以将纵向运动从闭合管(32)传送/传输到闭合环(33)。
柄部部分(20)还包括击发触发器(28)(图2所示)。细长构件(未示出)纵向延伸穿过轴(22),并响应于击发触发器(28)的致动而将纵向击发运动从柄部部分(20)传送到击发梁(14)。击发梁(14)的这种远侧平移使得端部执行器(12)中夹紧的组织被缝合和切断,如下文将更详细地描述的。
图3至图6示出了采用电子束形式的击发梁(14)的端部执行器(12)。如图4A至图4B中最佳地示出,击发梁(14)包括横向取向的上部销(38)、击发梁顶盖(44)、横向取向的中部销(46)和远侧呈现的切割刃(48)。上部销(38)被定位在砧座(18)的纵向砧座狭槽(42)内,并且能够在该纵向砧座狭槽内平移。击发梁顶盖(44)通过使击发梁(14)延伸穿过下钳口狭槽(45)(图4B所示)而可滑动地接合下钳口(16)的下表面,该下钳口狭槽是被形成为穿过下钳口(16)。中部销(46)以滑动的方式接合下钳口(16)的顶表面,从而与击发梁顶盖(44)协作。击发梁(14)和/或相关联的闭锁特征部可以根据以下美国公布的教导内容中的至少一些教导内容来构造:2017年8月1日公布的名称为“Lockout Feature for Movable CuttingMember of Surgical Instrument”的美国专利9,717,497,该专利的公开内容以引用方式并入本文。
图3示出了本示例的朝近侧定位的击发梁14和枢转到打开位置的砧座(18),从而允许未用尽的钉仓(37)被可移除地安装到下钳口(16)的通道中。如图5至图6中最佳地示出,本示例的钉仓(37)包括仓体(70),该仓体呈现出上部平台(72)并与下部仓托盘(74)联接。如图3中最佳地示出,竖直狭槽(49)被形成为穿过钉仓(37)的一部分。同样如图3中最佳地示出,三排钉孔(51)被形成为穿过竖直狭槽(49)的一侧上的上部平台(72),并且另一组三排钉孔(51)被形成为穿过竖直狭槽(49)的另一侧上的上部平台(72)。如图4A至图6所示,楔形滑动件(41)和多个钉驱动器(43)被捕获在仓体(70)与托盘(74)之间,其中楔形滑动件(41)位于钉驱动器(43)的近侧。楔形滑动件(41)能够在钉仓(37)内纵向地运动;而钉驱动器(43)能够在钉仓(37)内竖直地运动。钉(47)也被定位在仓体(70)内,位于对应的钉驱动器(43)上方。每个钉(47)在仓体(70)内被钉驱动器(43)竖直地驱动,以将钉(47)通过相关联的钉孔(51)驱动出。如图4A至图4B和图6中最佳地示出,楔形滑动件(41)存在倾斜的凸轮表面,随着楔形滑动件(41)朝远侧被驱动穿过钉仓(37),倾斜的凸轮表面向上推压钉驱动器(43)。钉仓(37)可以根据以下美国专利的教导内容中的至少一些教导内容来构造和操作:美国专利9,517,065,该专利的公开内容以引用方式并入本文;和/或美国专利9,808,248,该专利的公开内容以引用方式并入本文。
在通过朝远侧推进闭合管(32)和闭合环(33)以使端部执行器(12)如图4A至图4B所示闭合的情况下,通过使上部销(38)进入纵向砧座狭槽(42),将击发梁(14)推进至与砧座(18)接合。推块(80)(图5所示)位于击发梁(14)的远侧端部处,并且当击发触发器(28)被致动时,随着击发梁(14)朝远侧推进穿过钉仓(37),该推块推动楔形滑动件(41)。在此类击发期间,击发梁(14)的切割刃(48)进入钉仓(37)的竖直狭槽(49),从而切断被夹持在钉仓(37)与砧座(18)之间的组织。如图4A至图4B所示,中部销(46)和推块(80)通过进入钉仓(37)内的竖直狭槽(49)中而一起致动钉仓(37),从而将楔形滑动件(41)驱动成与钉驱动器(43)发生向上凸轮作用的接触,继而将钉(47)通过钉孔(51)驱动出并使钉与砧座(18)的内表面上的钉成形凹坑(53)(图3中所示)形成接触。图4B示出了在完成切断和缝合组织之后完全朝远侧平移的击发梁(14)。钉成形凹坑(53)从图4A至图4B中的视图中有意地省略了,但示出于图3中。从图5的视图中有意地省略了砧座(18)。
图7示出了已通过单个行程被致动穿过组织(90)的端部执行器(12)。切割刃(48)(图7中被遮住)已切穿组织(90),同时钉驱动器(43)已驱动三排交替的钉(47)穿过由切割刃(48)产生的切割线的每一侧上的组织(90)。在第一行程完成后,端部执行器(12)从患者撤回,用新钉仓替换用尽钉仓(37),然后,再次插入端部执行器(12)以到达缝合部位以进行进一步的切割和缝合。可重复该过程直到已提供期望数量的切口和钉(47)。
一些型式的器械(10)提供了对击发梁(14)的机动化控制。此类机动化控制可以根据以下美国专利的教导内容中的至少一些教导内容来提供:2017年4月18日公开的名称为“Distal Tip Features for End Effector of Surgical Instrument”的美国专利9,622,746,该专利的公开内容以引用方式并入本文;和/或2012年7月3日公布的名称为“Motor-Driven Surgical Instrument”的美国专利8,210,411,该专利的公开内容以引用方式并入本文。
在描述器械(10)的操作时,使用术语“枢转”(以及与作为基础的“枢转”类似的术语)不应被解读为必须要求围绕固定轴线进行枢转运动。在一些型式中,砧座(18)围绕由销(或类似的特征部)限定的轴线枢转,该销(或类似的特征部)随着砧座(18)朝向下钳口(16)运动而沿着细长狭槽或通道滑动。在此类型式中,枢转轴线沿着由狭槽和通道限定的路径平移,而砧座(18)同时围绕该轴线枢转。除此之外或另选地,枢转轴线首先可沿着狭槽/通道滑动,然后砧座(18)在枢转轴线已经沿着狭槽/通道滑动到某距离后围绕该枢转轴线枢转。此类滑动/平移枢转运动被包含在术语诸如“枢转”、“枢转的”、“能够枢转的”等内。
器械(10)可以根据本文引用的专利参考文献中的任一者的教导内容以其他方式来构造和操作。可提供用于器械(10)的附加示例性修改将在下文中更详细地描述。下述教导内容并不限于本文引用的专利中所教导的器械(10)或装置。下述教导内容可容易地应用到各种其他种类的器械,包括将不被归类为外科缝合器的器械。参考本文的教导内容,其中可应用下文教导内容的各种其他合适的装置和情况对本领域的普通技术人员将是显而易见的。
随着将端部执行器(12)插入外科部位,使用者可能会在手术期间使器械(10)的轴(22)和端部执行器(12)旋转。在一些情况下,可能看到端部执行器(12)的下钳口(16),而不是砧座(18);而在其他情况下,可能看到砧座(18),而不是下钳口(16)。使用者可能期望能够看到比使用图1的器械(10)时所能看到的外科部位范围更大的范围。举例来说,就其中横切并缝合流体输送血管的外科手术而言,可能期望视觉确认砧座(18)和下钳口(16)完全覆盖了需要切割的血管,使得在单一致动中就可以完全切割并缝合此血管。可能期望使得操作者能够更容易地在视觉上确认砧座(18)和下钳口(16)相对于血管的适当位置以完全夹紧血管。增强外科部位可视化的一种可行方式可包括改善与下钳口(16)和砧座(18)的远侧末端相邻区域的可视程度。还可以期望构造端部执行器(12)以使得砧座(18)的远侧端部被构造成能够随着砧座(18)朝向下钳口(16)闭合,将组织(例如,大血管)朝近侧推压到砧座(18)与下钳口(16)之间的空间中。
图8示出了包括砧座(218)和下钳口(216)的第二示例性端部执行器(212)。可以使用端部执行器(212)代替器械(10)的端部执行器(12)。端部执行器(212)可与器械(10)一体形成,或者另选地,可以为能够与器械(10)的端部执行器(12)互换。砧座(218)能够操作以相对于下钳口(216)枢转。砧座(218)和下钳口(216)可以类似于由图1所示的砧座(18)和下钳口(16)执行的夹持来夹持组织(90)。端部执行器(212)还包括仓(237),其与图3所示的仓(37)类似地能够操作以放置在下钳口(216)中。
如图8至图10中所示,砧座(218)具有细长形状,其中砧座(218)的远侧部分朝仓(237)弯成角度,使得砧座(218)的最远侧末端(219)在纵向上朝远侧延伸超过仓(237)。另选地,最远侧末端(219)可延伸至在纵向上等于与仓(237)同等的距离,或者延伸至相对于仓(237)上的最远侧点的近侧。如图10中最佳所示,砧座(218)包括在侧向接近砧座(218)的最远侧末端(219)时渐缩的侧面(241)。砧座(218)的成角度形状可使端部执行器212更容易插入外科部位。例如,具有平缓坡度或倒转的滑雪板末端形状的砧座(218)在接触组织或运动穿过组织时,砧座(218)可提供无创伤组织偏转表面。这种无创伤组织偏转可以包括随着砧座(218)朝向下钳口(216)闭合,将组织例如,大血管朝近侧推压到砧座(218)与下钳口(216)之间的空间中。一旦被放置到外科部位,砧座(218)的成角度形状还可以提供端部执行器(212)的更好的可操纵性以及端部执行器(212)的远侧端部相对于外科部位处的解剖结构的更好可见性。
仓(237)能够操作以保持与图4A所示的钉(47)类似的钉以用于驱动到组织中。如图9所示,仓(237)的远侧端部具有由上部锥形表面(239)和下部锥形表面(238)限定的三角形轮廓。仓(237)的远侧端部在每个侧上还包括锥形侧表面(243)。在本示例中,仓(237)的每个锥形侧表面(243)通常与由砧座(218)的侧面(241)呈现的锥形对准。因此,如图10所示,仓(237)的侧表面(243)不会从端部执行器(212)的纵向轴线(LA)向外延伸超过砧座(218)的侧面(241)。上部锥形表面(239)和下部锥形表面(238)通向仓(237)的最远侧端部。下部锥形表面(238)限定视准线(240),使得一旦端部执行器(212)被插入外科部位中,使用者就可沿视准线(240)观察。视准线(240)沿下部锥形表面(238)的边缘延伸。视准线(240)与纵向延伸穿过端部执行器(212)的纵向轴线(LA)相交,以形成视角(θ)。
下部锥形表面(238)的平面形状有利于砧座(218)的最远侧末端(219)的可视化。视角(θ)可确立使用者具有最远侧末端(219)的相对可见性,使得使用者可沿着穿过视角(θ)内的视线(240)和纵向轴线(LA)的交点的任何视准线在最远侧末端(219)前方观察。随着视角(θ)的增加,使用者将从近侧有利位置对直接在最远侧末端(219)正前方的区域具有更大的可见性;随着视角(θ)减小,使用者从近侧有利位置对最远侧末端(219)前方的区域具有更小的可见性。在一些型式中,视角(θ)限定大于90度的角度。另外,在一些型式中,视角(θ)限定大于135度的角度。在示出的型式中,使用者通常沿视准线(240)或沿视角(θ)范围内的一些其他视线观察,使得使用者不仅能观察到沿视准线的区域,还能观察到视角(θ)范围内的任意区域。最远侧末端(219)的下侧还可以略圆,以有助于使用者看到纵向轴线(LA)和视准线(240)的交点。
当组织(90)被夹持在闭合的仓(237)与砧座(218)之间时,使用者可沿视准线(240)或在视角(θ)范围内的其他位置观察,例如清晰地看到砧座(218)在何位置夹持组织90。此外,使用者将能够确定组织是否被完全夹持在砧座(218)与仓(237)之间,以使得组织不溢出端部执行器(212)的末端。使用者还能够可视化砧座(218)与仓(237)之间针对组织(90)的夹持程度。在一些情况下,端部执行器(212)可以在夹持组织(90)之前、期间或之后旋转。因此,砧座(218)的锥形形状还能够提供对最远侧末端(219)或大体相邻的最远侧末端(219)的更容易观察。锥形的砧座(218)连同仓(237)的下部锥形表面(238)可进一步促进端部执行器(212)以无创伤的方式轻松插入组织中。此外,由于端部执行器(212)的锥形端部,可能更容易通过套管针或能够操作以将端部执行器(212)引入外科部位中的其他装置来装配端部执行器(212)。下部锥形表面(238)和砧座(218)锥形形状可用作引入端,从而将端部执行器(212)的其余部分引导到套管针中。因此,可通过砧座(218)的两个侧面(241)和仓(237)的每个侧面(243)的渐缩设计来增强可见性和可操纵性。
除上述之外,端部执行器(212)和结合了端部执行器(212)的器械(10)的型式可根据本文引用的专利参考文献中的任何一者或多者的教导内容来构造和操作。可以结合到端部执行器(212)中的另外的修改将在下面更详细地描述。
在一些手术中,可能需要沿组织或穿过组织切割,其中需要多于一个切割顺序来完成手术—换句话说,沿着连续路径进行顺序切割。在此类手术中,这种顺序切割技术可以定义为“行进(marching)”。对于涉及行进的手术,可以将器械(10)放置在外科部位处,致动器械以切割和缝合,然后从外科部位移除器械以用于安装新的仓(37),并且然后再次将器械放回外科部位处,以沿着发生先前切割和缝合周期的相同路径进行下一次切割和缝合。重复该过程直到切割和缝合手术完成。如图4A至图4B和图7中可见,端部执行器(12)的远侧端部构型在砧座(18)的远侧端部和仓(37)的远侧端部之间提供间隙。该间隙可以通过在每个行进步骤开始时为组织提供用于进入端部执行器(12)的远侧端部的无创伤空间而有利于行进。
如上所述,端部执行器(212)的远侧端部构型与端部执行器(12)的远侧端部构型不同;端部执行器(212)的不同构型提供不同的潜在优势,诸如增强的可视化、可操纵性和/或组织聚集效果。然而,在端部执行器(212)的所有结构都是刚性的型式中,砧座(218)的最远侧末端(219)的弯折构型可能不适合行进操作,因为随着砧座(218)朝向下钳口(216)闭合,最远侧末端(219)可能对未聚集到砧座(218)与下钳口(216)之间的空间中的组织造成创伤。因此,在端部执行器(212)的所有结构都是刚性的型式中,端部执行器(212)可能最适合切割和缝合操作(例如,血管横切),其中所有待切割和缝合的组织均在最远侧末端(219)的近侧被聚集。
鉴于上述情况,可能期望提供端部执行器(12,212)的变型,该变型提供了端部执行器(12)的行进能力、与端部执行器(212)相关联的改进的可见性、可操纵性以及组织聚集效果,而不会增加否则可能与端部执行器(212)的完全刚性型式相关联的创伤风险。以下描述了端部执行器(12,212)的此类变型的几个仅示意性示例。在以下示例中,砧座具有远侧末端,该远侧末端被弹性偏压以呈现类似于远侧末端(219)的弯折或成角度的构型;然而,受弹性偏压的远侧末端能够响应于远侧末端上的足够负载而远离下钳口偏转。就穿过组织导航到外科部位而言,提供可变形末端可提供附加水平的可操纵性有益效果。以这种方式,可变形末端可以偏转或变形,以促进端部执行器平滑和无创伤运动穿过组织,特别是在行进操作期间。
图11、图12A至图12E和图13A至图13D示出了被构造为外科缝合器的第二示例性外科器械(310),该外科器械包括第三示例性端部执行器(312)和第一示例性放置末端(314)。端部执行器(312)包括上钳口和下钳口(316),其中该上钳口包括砧座(318)。器械(310)另外包括被示出为柄部部分(320)的主体和从柄部部分(320)延伸的轴(322)。如图11和图12A至12B所示,轴(322)限定在下文通常称为轴轴线(SA)的纵向轴线。除了下文另外描述的之外,下文所述的器械(310)可像上文所述的器械(10)那样构造和操作。因而,将从以下描述中省略器械(310)的某些细节,应当理解,这些细节已经在上文对器械(10)的描述中提供。
器械(310)可具有模块化构型,使得轴(322)能够选择性地从柄部部分(320)移除并能够选择性地附接到该柄部部分。器械(310)与器械(10)类似地构造,使得器械(310)的可操作性和使用与上文针对器械(10)描述的可操作性和使用相同,其中器械(310)的附加功能具有模块化构型。通过其模块化构型,器械(310)提供了更换期望端部执行器的方法。除了前述内容之外或代替前述内容,能够操作用于提供器械(310)的模块化构型的特征部可以根据以下美国专利的教导内容中的至少一些教导内容来构造:2017年3月30日发布的名称为“Surgical Stapling Instrument with Shaft Release,Powered Firing,andPowered Articulation”的美国公布2017/0086823,该公布的公开内容以引用方式并入本文;和/或2018年3月13日公布的名称为“Surgical Instrument Comprising a SensorSystem”的美国专利9,913,642,该专利的公开内容以引用方式并入本文。在一些其他型式中,轴(322)不能够从柄部部分(320)拆卸。
如下文更详细地讨论,端部执行器(312)设置在轴(322)上并且能够操作以压缩、缝合和切割组织。可以使用端部执行器(312)代替图1中所示的端部执行器(12)。在一些型式中,端部执行器(312)可与轴(322)一体形成;或者另选地,可单独形成端部执行器并随后将其组装。在一些型式中,可以提供端部执行器(312)以用于机器人系统中。在此类机器人系统中,具有端部执行器(312)的模块化轴(322)可以为能够附接到机器人系统的一部分以供使用,使得柄部部分(320)被机器人系统的部件(包括主体)替换。将具有放置末端(314)的端部执行器(312)结合到使用者操作或机器人操作的器械中的其他方式对于本领域的普通技术人员而言将是显而易见的。
放置末端(314)能够操作以从非偏转位置弹性变形到偏转位置。当端部执行器(312)未夹持组织时,放置末端(314)获得非偏转位置。更具体地,在该非偏转位置,端部执行器(312)可处于如图11所示的打开构型,或处于如图8和图9所示的相对于端部执行器(212)的闭合构型。在端部执行器(312)处于该非偏转位置的情况下,端部执行器(312)可被视为处于非加载状态或非加载位置。相反,在端部执行器(312)正夹持组织时的偏转位置(未示出),端部执行器(312)可被视为处于加载状态或加载位置。在该偏转位置,放置末端(314)的至少一部分向上偏转。放置末端(314)的偏转位置在一些型式中可以是基本上直的,但在其他型式中可以偏转到一定程度(例如,略高于或略低于轴轴线(SA))。应当理解,放置末端(314)的偏转位置可由被捕获在砧座(318)与下钳口(316)之间的组织的特性(例如,厚度、密度等)限定,从而引起放置末端(314)的偏转。在一些变型中,放置末端(314)不响应于负载而偏转。
还应当理解,本文的教导内容可容易地与以下美国专利申请中的各种教导内容组合:与本申请同日提交的美国专利申请[代理人案卷号END8594USNP.0659212],名称为“Surgical Stapling End Effector Component with Deformable Tip Skewing inMultiple Planes”,该专利的公开内容以引用方式并入本文。本文的教导内容可与美国专利申请[代理人案卷号END8594USNP.0659212]的教导内容进行组合的各种合适方式对于本领域的普通技术人员而言将是显而易见的。
图12A至图12E示出了端部执行器(312)的远侧端部的放大视图。放置末端(314)邻近砧座(318)的远侧端部(321)或下钳口(316)的远侧端部中的至少一者定位。如图11和图12A至图12E所示,放置末端(314)与砧座(318)的远侧端部(321)联接。放置末端(314)可永久性地固定到砧座(318),或者另选地,放置末端(314)可与砧座(318)可移除地联接。放置末端(314)可与砧座(318)一起一体地形成为一体件或由单独形成的部件组成。放置末端(314)可定位在与钉仓(324)相同的钳口上或与砧座(318)相同的钳口上。如图11和图12A至图12E所示,上钳口包括砧座(318),而下钳口(316)与钉仓(324)可移除地联接。然而,如果需要,这种关系可颠倒。钉仓(324)被构造成能够以类似于钉仓(37)的方式保持一个或多个钉。
如前所述,砧座(318)或下钳口(316)中的至少一者能够相对于砧座(318)或下钳口(316)中的另一者在打开构型和闭合构型之间运动。如图所示,如上文相对于器械(10)所述,砧座(318)以与砧座(18)相同的方式朝向下钳口(316)可枢转地旋转。这样,除了放置末端(314)的侧向偏转构型和可变形性之外,端部执行器(312)类似于端部执行器(12)。在闭合构型中,放置末端(314)的一部分可与钉仓(324)的成角度表面(338)邻接接触;或者另选地,放置末端(314)与钉仓(324)之间可存在侧向间隙。另外,如图12A至12E的顶视图所示,下钳口(316)通常比砧座(318)和放置末端(314)更长和更宽。然而,如果需要,下钳口(316)可比砧座(318)和放置末端(314)更短和/或更窄。
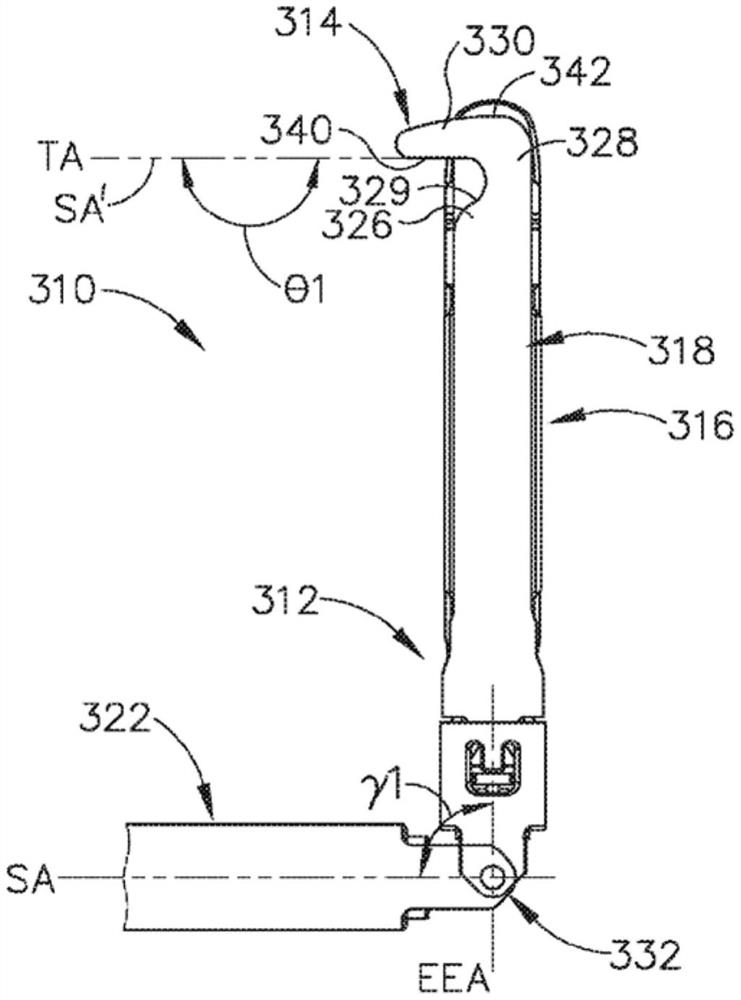
图11和图12A至12E示出了包括近侧部分(326)、中心部分(328)和远侧部分(330)的放置末端(314)。近侧部分(326)从砧座(318)的远侧端部(321)朝远侧延伸并且被设置成与下钳口(316)相对。中心部分(328)纵向地设置在近侧部分(326)与远侧部分(330)之间。放置末端(314)的中心部分(328)和远侧部分(330)沿着轴(322)的纵向轴线(即,轴轴线(SA))各自包括不对称轮廓。如图12A至图12E的顶视图所示,中心部分(328)沿着左侧上的向内渐缩部分(329)向内渐缩(当从上方观察时),而相对的右侧朝远侧部分(330)弓形地延伸。
远侧部分(330)包括由远侧部分(330)的末端(314)延伸的方向限定的末端轴线(TA)。末端(314)包括近侧表面(340)和远侧表面(342),其中近侧表面(340)从向外渐缩部分(329)向外延伸。在所示示例中,使用末端(314)的近侧表面(340)测量末端轴线(TA)。另选地,也可使用其他表面(例如,远侧表面(342))。此外,轴轴线(SA)和末端轴线(TA)限定能够选择性地调节的角度。为了更清楚起见,图12A至图12E中分别示出了修改的轴轴线(SA'),以更好地可视化通常形成于轴轴线(SA)与末端轴线(TA)之间的角θ(θ1-θ5)。改进的轴轴线(SA')从轴轴线(SA)偏移并与之平行延伸。另外,如图12A至图12E所示,末端轴线(TA)大致垂直于端部执行器(312)的纵向轴线,该端部执行器在本文中被称为端部执行器轴线(EEA)。
如先前相对于器械(10)所述,器械(310)被示出为包括关节运动接头(332),该关节运动接头将轴(322)与端部执行器(312)可枢转地联接。关节运动接头(332)可与上述关节运动接头(11)相同或类似,为了简洁起见,省略了有关关节运动接头(332)的细节。关节运动接头(332)被构造成使得端部执行器(312)能够相对于轴(322)侧向枢转。如图12A至图12E所示,修改的轴轴线(SA')和末端轴线(TA)共同限定各种角θ(θ1-θ5),其中角θ能够使用关节运动接头(332)选择性地调节。关节运动接头(332)可以为能够由使用者使用电动关节运动来选择性地调节。另选地,关节运动接头(332)可使用图11所示的关节运动控件(344)手动供电。关节运动接头(332)使端部执行器轴线(EEA)相对于轴轴线(SA)运动,从而产生不同的角θ(θ1-θ5)。
如下文更详细地描述,图12A至图12E示出了能够在约0度至约180度之间选择性地调节的各种角θ(θ1-θ5)。而图12A至图12E将角θ(θ1-θ5)示出为五个不同的角,但应当理解,角θ也可以为介于约0度至约180度之间的任何角度。例如,图12A示出由修改的轴轴线(SA')和末端轴线(TA)限定的角θ(θ1)为约0度,使得轴轴线(SA)和末端轴线(TA)大致平行于彼此延伸。端部执行器轴线(EEA)大致垂直于轴轴线(SA1)和末端轴线(TA)两者延伸,使得角γ(γ1)为90度。当角θ(θ1)为0度时,远侧部分(330)的末端(314)平行于轴轴线(SA)指向。在图12A所示的状态下,末端(314)也相对于轴(322)朝近侧取向。
图12B示出角θ(θ2)为约45度并且在修改的轴轴线(SA')和末端轴线(TA)之间测量。角γ(γ2)为约135度并且在轴轴线(SA)和端部执行器轴线(EEA)之间测量。
图12C示出角θ(θ3)为约90度并且在修改的轴轴线(SA')和末端轴线(TA)之间测量。另外,角γ(γ3)为在轴轴线(SA)和端部执行器轴线(EEA)之间测量的约180度。
图12D示出角θ(θ4)为约135度并且在修改的轴轴线(SA')和末端轴线(TA)之间测量。另外,角γ(γ4)为在轴轴线(SA)和端部执行器轴线(EEA)之间测量的约225度。
图12E示出角θ(θ5)为约180度并且在修改的轴轴线(SA')和末端轴线(TA)之间测量。另外,角γ(γ5)为在轴轴线(SA)和端部执行器轴线(EEA)之间测量的约270度。当角θ(θ5)为180度时,远侧部分(330)的末端(314)平行于轴轴线SA指向。在图12E所示的状态下,末端(314)也相对于轴(322)朝远侧取向。
假设端部执行器(312)的图12C的位置是基线位置,如图11所示,当顶锥角(θ3)为90度时,轴轴线(SA)平行于端部执行器轴线(EEA)。此外,假设图12C为基线位置,如图12A和图12B所示的角θ(θ1-θ2)沿着第一关节运动方向形成锐角(示出为逆时针旋转)。相反,如图12D和图12E所示的角θ(θ4-θ5)沿着与第一关节运动方向相反的第二关节运动方向形成钝角(示出为顺时针旋转)。
图13A至图13D示出了操作器械(310)用于接触组织(410)的示例性方法。如图所示,器械(310)又包括端部执行器(312)、放置末端(314)、下钳口(316)、砧座(318)、轴(322)、钉仓(324)、近侧部分(326)、中心部分(328)、远侧部分(330)、末端(314)、成角度表面(338)、近侧表面(340)和远侧表面(342)。图13A示出了正朝向组织(410)的已经分开的第一层(412)和第二层(414)引入的器械(310)。第一层(412)和第二层(414)共同限定组织开口(416)。如图所示,器械(310)处于打开构型。虽然未示出,但还设想上钳口和下钳口(316)可处于闭合构型。另外,如果需要,放置末端(314)的形状可变化。
图13B示出了正朝向组织(410)的共同限定组织开口(416)的已经分开的第一层(412)和第二层(414)侧向运动的器械(310)。如图所示,放置末端(314)的末端(314)进入已经形成的组织开口(416)。放置末端(314)不执行组织(410)的切开,这包括分离第一层(412)和第二层(414)以形成组织开口(416)。相反,组织(410)的第一层(412)和第二层(414)已经使用多种已知方法和装置中的任一种分开。在一些其他变型中,随着端部执行器(312)在患者体内运动,放置末端(314)提供组织的至少一些钝性分离(例如,将不同的解剖结构彼此分隔开)。
图13C示出了侧向运动穿过组织开口(416)的器械(310)的放置末端(314)。在该示例中,可仅使用侧向运动来获得穿过组织开口(416)放置放置末端(314)。如先前所指出,中心部分(328)和远侧部分(330)沿着放置末端(314)的末端轴线(TA)具有不对称轮廓。如图所示,远侧部分330现在穿过已经分开的第一组织层(412)和第二组织层(414)。
图13D示出了一旦已经穿过组织开口(416),随后朝远侧推进(314)的放置末端(314)。根据图13D的透视图,远侧被示出为向上和向左。当然,这可在给定组织410的位置的情况下变化。在达到图13D所示的状态之后,操作者可进一步定位端部执行器(312),使得组织(412)(例如,目标用于横切的血管)定位在砧座(318)的钉成形凹坑与钉仓的对应钉孔之间。然后操作者可致动端部执行器(312)以横切和缝合组织(412)。
根据该示例的器械(310)可以包括关节运动接头(332),以使端部执行器(312)以与上文相对于图12A至图12E所述类似或不同的方式旋转到期望的角度。使器械(310)的打开钳口侧向运动穿过组织开口(416)可包括使用者手动地或使用如先前相对于器械(10,310)所述的动力关节运动来选择性地调节关节运动接头(332)。
以下实施例涉及本文的教导内容可被组合或应用的各种非穷尽性方式。应当理解,以下实施例并非旨在限制可在本专利申请或本专利申请的后续提交文件中的任何时间提供的任何权利要求的覆盖范围。不旨在进行免责声明。提供以下实施例仅仅是出于例示性目的。预期本文的各种教导内容可按多种其他方式进行布置和应用。还设想到,一些变型可省略在以下实施例中所提及的某些特征。因此,下文提及的方面或特征中的任一者均不应被视为决定性的,除非另外由发明人或关注发明人的继承者在稍后日期明确指明如此。如果本专利申请或与本专利申请相关的后续提交文件中提出的任何权利要求包括下文提及的那些特征之外的附加特征,则这些附加特征不应被假定为因与专利性相关的任何原因而被添加。
一种器械,包括:(a)主体;(b)轴,所述轴从所述主体延伸并限定沿所述轴纵向延伸的轴轴线;以及(c)端部执行器,所述端部执行器与所述轴连通,其中所述端部执行器能够操作以压缩、缝合和切割组织,其中所述端部执行器包括:(i)相对的第一钳口和第二钳口,其中所述第一钳口和所述第二钳口中的至少一者能够相对于所述第一钳口和所述第二钳口中的另一者在打开位置和闭合位置之间运动,(ii)钉仓,所述钉仓被构造成能够保持一个或多个钉,其中所述钉仓与所述第二钳口联接,和(iii)放置末端,所述放置末端从所述第一钳口的远侧端部或所述第二钳口的远侧端部延伸,其中所述放置末端包括近侧部分和远侧部分,其中所述近侧部分沿着所述轴的所述纵向轴线包括不对称轮廓,并且其中所述远侧部分包括由所述远侧部分的末端限定的末端轴线,其中所述轴轴线和所述末端轴线限定能够选择性地调节的角度。
根据实施例1所述的器械,还包括将所述轴与所述端部执行器联接的关节运动接头,其中所述关节运动接头被构造成使得所述端部执行器能够相对于所述轴枢转,其中所述轴轴线和所述末端轴线限定能够使用所述关节运动接头选择性地调节的角度。
根据实施例2所述的器械,其中,所述关节运动接头能够由使用者选择性地调节。
根据实施例1至3中任一项或多项所述的器械,其中,所述角度能够在约0度至约180度之间选择性地调节。
根据实施例1至4中任一项或多项所述的器械,其中,所述角度能够在约45度至约135度之间选择性地调节。
根据实施例1至5中任一项或多项所述的器械,其中,所述角度能够从沿第一关节运动方向的锐角选择性地调节到沿第二关节运动方向的钝角,其中所述第二方向与所述第一方向相反。
根据实施例1至6中任一项或多项所述的器械,其中,当所述角度为180度时,所述远侧部分的所述末端平行于所述轴轴线指向。
根据实施例1至7中任一项或多项所述的器械,其中,所述末端轴线垂直于端部执行器轴线延伸,所述端部执行器轴线沿着所述端部执行器纵向延伸。
根据实施例1至8中任一项或多项所述的器械,其中,第一钳口包括砧座和所述放置末端,并且第二钳口包括所述钉仓。
根据实施例9所述的器械,其中,所述放置末端被永久性地固定到所述砧座。
根据实施例1至10中任一项或多项所述的器械,其中,与所述放置末端相对设置的钳口朝远侧延伸超过所述放置末端的所述远侧部分的所述末端。
根据实施例1至11中任一项或多项所述的器械,其中,所述远侧部分的所述末端侧向延伸超过与所述放置末端相对设置的钳口的宽度。
一种器械,包括:(a)主体;(b)轴,所述轴从所述主体延伸并限定沿所述轴纵向延伸的轴轴线;和(c)端部执行器,所述端部执行器与所述轴连通,其中所述端部执行器能够操作以压缩、缝合和切割组织,其中所述端部执行器包括:(i)相对的第一钳口和第二钳口,其中所述第一钳口和所述第二钳口中的至少一者能够相对于所述第一钳口和所述第二钳口中的另一者在打开位置和闭合位置之间运动,(ii)钉仓,所述钉仓被构造成能够保持一个或多个钉,其中所述钉仓与所述第二钳口联接,和(iii)放置末端,所述放置末端从所述第一钳口的远侧端部或所述第二钳口的远侧端部延伸,其中所述放置末端包括近侧部分和远侧部分,并且其中所述远侧部分包括由所述远侧部分的末端限定的末端轴线;和(d)关节运动接头,所述关节运动接头将所述轴与所述端部执行器联接,其中所述关节运动接头被构造成使得所述端部执行器能够相对于所述轴枢转,其中所述轴轴线和所述末端轴线限定能够使用所述关节运动接头选择性地调节的角度,其中所述角度能够在约0度至约180度之间选择性地调节。
根据实施例13所述的器械,其中,所述角度能够从沿第一关节运动方向的锐角选择性地调节到沿第二关节运动方向的钝角,其中所述第二方向与所述第一方向相反。
根据实施例13至14中任一项或多项所述的器械,其中,所述远侧部分沿着所述轴的所述纵向轴线具有不对称轮廓。
一种操作器械的方法,所述方法包括:(a)将所述器械的钳口的放置末端放置在共同限定组织开口的第一组织层和第二组织层之间,其中所述放置末端沿着末端轴线取向,所述末端轴线相对于所述钳口的近侧部分的纵向轴线侧向取向;以及(b)使所述器械的所述放置末端沿着所述末端轴线侧向运动穿过所述组织开口。
根据实施例16所述的方法,其中,放置所述放置末端还包括仅使用侧向运动将所述放置末端穿过所述组织开口放置。
根据实施例16至17中任一项或多项所述的方法,还包括随后穿过所述组织开口朝远侧推进所述放置末端。
根据实施例16至18中任一项或多项所述的方法,其中,所述放置末端从所述钳口的远侧端部延伸,其中所述放置末端包括近侧部分和远侧部分,其中所述远侧部分沿着所述放置末端的纵向轴线具有不对称轮廓,并且其中放置所述放置末端包括将具有所述不对称轮廓的所述远侧部分放置在已经分开的第一组织层和第二组织层之间。
根据实施例16至19中任一项或多项所述的方法,其中,所述器械包括与所述轴操作地联接的关节运动接头,其中使所述器械的所述打开钳口侧向运动穿过所述组织开口包括使用者选择性地调节所述关节运动接头。
应当理解,本文所述的教导内容、表达、实施方案、示例等中的任何一者或多者可与本文所述的其他教导内容、表达、实施方案、示例等中的任何一者或多者进行组合。因此,上述教导内容、表达、实施方案、示例等不应视为彼此孤立。鉴于本文的教导内容,本文的教导内容可进行组合的各种合适方式对于本领域的普通技术人员将是显而易见的。此类修改和变型旨在包括在权利要求书的范围内。
还应当理解,本文的教导内容可容易地与以下美国专利申请中的各种教导内容组合:与本申请同日提交的美国专利申请[代理人案卷号END8115USCIP3.0659198],名称为“Method of Surgical Stapling with End Effector Component Having a CurvedTip”,该专利的公开内容以引用方式并入本文。本文的教导内容可与美国专利申请[代理人案卷号END8115USCIP3.0659198]的教导内容进行组合的各种合适方式对于本领域的普通技术人员而言将是显而易见的。
还应当理解,本文的教导内容可容易地与以下美国专利申请中的各种教导内容组合:与本申请同日提交的美国专利申请[代理人案卷号END8115USCIP2.0659204],名称为“Surgical Stapling End Effector Jaw with Tip Deflecting Toward Other Jaw”,该专利的公开内容以引用方式并入本文。本文的教导内容可与美国专利申请[代理人案卷号END8115USCIP2.0659204]的教导内容进行组合的各种合适方式对于本领域的普通技术人员而言将是显而易见的。
还应当理解,本文的教导内容可容易地与以下美国专利申请中的各种教导内容组合:与本申请同日提交的美国专利申请[代理人案卷号END8115USCIP1.0659200],名称为“Surgical Stapling End Effector Component with Tip Having Varying BendAngle”,该专利的公开内容以引用方式并入本文。本文的教导内容可与美国专利申请[代理人案卷号END8115USCIP1.0659200]的教导内容进行组合的各种合适方式对于本领域的普通技术人员而言将是显而易见的。
还应当理解,本文的教导内容可容易地与以下美国专利申请中的各种教导内容组合:与本申请同日提交的美国专利申请[代理人案卷号END8578USNP.0658213],名称为“Permanent Attachment Means for Curved Tip of Component of Surgical StaplingInstrument”,该专利的公开内容以引用方式并入本文。本文的教导内容可与美国专利申请[代理人案卷号END8578USNP.0658213]的教导内容进行组合的各种合适方式对于本领域的普通技术人员而言将是显而易见的。
还应当理解,本文的教导内容可容易地与以下美国专利申请中的各种教导内容组合:与本申请同日提交的美国专利申请[代理人案卷号END8593USNP.0659208],名称为“Surgical Stapling End Effector Component with Deformable Tip Having Void”,该专利的公开内容以引用方式并入本文。本文的教导内容可与美国专利申请[代理人案卷号END8593USNP.0659208]的教导内容进行组合的各种合适方式对于本领域的普通技术人员而言将是显而易见的。
还应当理解,本文的教导内容可容易地与以下美国专利申请中的各种教导内容组合:与本申请同日提交的美国专利申请[代理人案卷号END8596USNP.0659218],名称为“Surgical Stapling End Effector Component with Deformable Tip Having ThickDistal End”,该专利的公开内容以引用方式并入本文。本文的教导内容可与美国专利申请[代理人案卷号END8596USNP.0659218]的教导内容进行组合的各种合适方式对于本领域的普通技术人员而言将是显而易见的。
还应当理解,本文的教导内容可容易地与以下美国专利申请中的各种教导内容组合:与本申请同日提交的美国专利申请[代理人案卷号END8597USNP.0659221],名称为“Buttress Applier Cartridge for Surgical Stapler Having End Effector withDeflectable Curved Tip”,该专利的公开内容以引用方式并入本文。本文的教导内容可与美国专利申请[代理人案卷号END8597USNP.0659221]的教导内容进行组合的各种合适方式对于本领域的普通技术人员而言将是显而易见的。
应当理解,据称以引用方式并入本文的任何专利、专利公布或其他公开材料,无论是全文或部分,仅在所并入的材料与本公开中所述的现有定义、陈述或者其他公开材料不冲突的范围内并入本文。因此,并且在必要的程度下,本文明确列出的公开内容代替以引用方式并入本文的任何冲突材料。据称以引用方式并入本文但与本文列出的现有定义、陈述或其他公开材料相冲突的任何材料或其部分,将仅在所并入的材料和现有的公开材料之间不产生冲突的程度下并入。
上述装置的型式可应用于由医疗专业人员进行的传统医学治疗和手术、以及机器人辅助的医学治疗和手术中。仅以举例的方式,本文的各种教导内容可易于结合到机器人外科系统,诸如Intuitive Surgical,Inc.(Sunnyvale,California)的DAVINCI
上文所述的装置的型式可被设计为在使用一次之后丢弃,或者它们可被设计为供多次使用。在任一种情况或两种情况下,可对这些型式进行修复以在至少一次使用之后重复使用。修复可包括以下步骤的任意组合:拆卸装置,然后清洁或替换特定零件以及随后进行重新组装。具体地,可拆卸装置的一些型式,并且可以任何组合来选择性地替换或移除装置的任意数量的特定零件或部件。在清洁和/或替换特定部件时,装置的一些型式可在修复设施处被重新组装或者在即将进行手术之前由使用者重新组装以供随后使用。本领域的技术人员将会了解,装置的修复可利用多种技术进行拆卸、清洁/替换、以及重新组装。此类技术的使用以及所得的修复装置均在本申请的范围内。
仅以举例的方式,本文描述的型式可在手术之前和/或之后消毒。在一种消毒技术中,将装置放置在闭合且密封的容器诸如塑料袋或TYVEK袋中。然后可将容器和装置放置在可穿透容器的辐射场中,诸如γ辐射、x射线、或高能电子。辐射可杀死装置上和容器中的细菌。随后可将经消毒的装置储存在无菌容器中,以供以后使用。还可使用本领域已知的任何其他技术对装置进行消毒,该技术包括但不限于β辐射或γ辐射、环氧乙烷或蒸汽。
已经示出和描述了本发明的各种实施方案,可在不脱离本发明的范围的情况下由本领域的普通技术人员进行适当修改来实现本文所述的方法和系统的进一步改进。已经提及了若干此类可能的修改,并且其他修改对于本领域的技术人员将是显而易见的。例如,上文所讨论的示例、实施方案、几何形状、材料、尺寸、比率、步骤等均是例示性的而非必需的。因此,本发明的范围应根据以下权利要求书来考虑,并且应理解为不限于说明书和附图中示出和描述的结构和操作的细节。
- 具有关节运动和不对称可变形末端的外科缝合端部执行器部件
- 具有带空隙的可变形末端的外科缝合端部执行器部件