电子控制装置
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及一种电子控制装置。
背景技术
近年来,为了实现车辆的舒适、安全的驾驶辅助和自动驾驶,提出有对潜藏在识别车辆周边环境的传感器的死角区域内的风险进行判断的技术。专利文献1中揭示了一种物体检测装置,其特征在于,具备:物体检测单元,其借助多个传感器来检测存在于自身车辆周边的物体;当前时刻物体信息获取单元,其获取所述物体检测单元检测到的物体的当前时刻的相对位置及相对速度;过去时刻物体信息获取单元,其获取所述物体检测单元检测到的物体的过去时刻的相对位置及相对速度;侵入候选死角区域判断单元,其将脱离所述物体检测单元的检测范围的死角区域当中的在过去时刻物体位于围绕该死角区域的死角周边区域内、该物体的过去时刻的相对速度的朝向为该死角区域的方向的区域作为在当前时刻该物体侵入的死角区域的候选加以输出;死角区域侵入判断单元,在被所述侵入候选死角区域判断单元视为候选的围绕死角区域的死角周边区域内、在当前时刻不存在物体的情况下,所述死角区域侵入判断单元判断该物体侵入到了该死角区域内;死角区域退出判断单元,在围绕在过去时刻被判断为存在物体的死角区域的死角周边区域内、在当前时刻存在物体的情况下,所述死角区域退出判断单元判断该物体已从该死角区域退出;以及判断统合单元,其将在过去时刻存在物体的死角区域、在当前时刻物体所侵入的死角区域、以及在当前时刻物体已退出的死角区域加以统合来判断在当前时刻存在物体的死角区域。
现有技术文献
专利文献
专利文献1:日本专利特开2018-101295号公报
发明内容
发明要解决的问题
在专利文献1记载的发明中,无法应对传感器无法检测的障碍物,在安全性方面存在改善的余地。
解决问题的技术手段
本发明的第1形态的电子控制装置是一种搭载于车辆中的电子控制装置,具备:周边障碍物确定部,其根据所述车辆中搭载的传感器的输出来确定存在于所述车辆周边的障碍物;死角区域确定部,其确定不包含在所述周边障碍物确定部的检测范围内的死角区域;区域判断部,其将所述死角区域分类为可能存在障碍物的危险死角区域和不存在障碍物的安全死角区域;以及障碍物区域推断部,其推断潜在障碍物在当前时刻可能存在的区域即障碍物存在区域,所述潜在障碍物是指在过去时刻可能存在于在过去时刻分类出的所述危险死角区域内的潜在性的障碍物,所述区域判断部将所述死角区域确定部所确定的死角区域当中的至少与所述障碍物存在区域重复的区域判断为所述危险死角区域。
发明的效果
根据本发明,可以将传感器无法检测的潜在性的障碍物也考虑进去来算出危险的死角区域。
附图说明
图1为实施方式中的行驶控制装置的功能框图。
图2的(a)为说明成为死角区域的说明的前提的状况的图,图2的(b)为表示与图2的(a)相对应的死角区域的图。
图3为表示实施方式中的行驶控制装置所实现的功能的相关关系的图。
图4为表示区域判断部的判断内容的图。
图5为表示行驶控制装置3的处理的流程图。
图6为说明图5的S304中执行的死角区域风险判断处理的流程图。
图7为第1动作例,图7的(a)为表示时刻T的状态的图,图7的(b)为表示时刻T+δ的状态的图。
图8的(a)为表示时刻T-α的处理结果的图,图8的(b)为表示时刻T~时刻T+δ的处理结果的图。
图9为说明第2动作例的状况的图。
图10为表示第2动作例中的处理结果的图。
图11为说明第3动作例的图。
图12为变形例2中的行驶控制装置的功能框图。
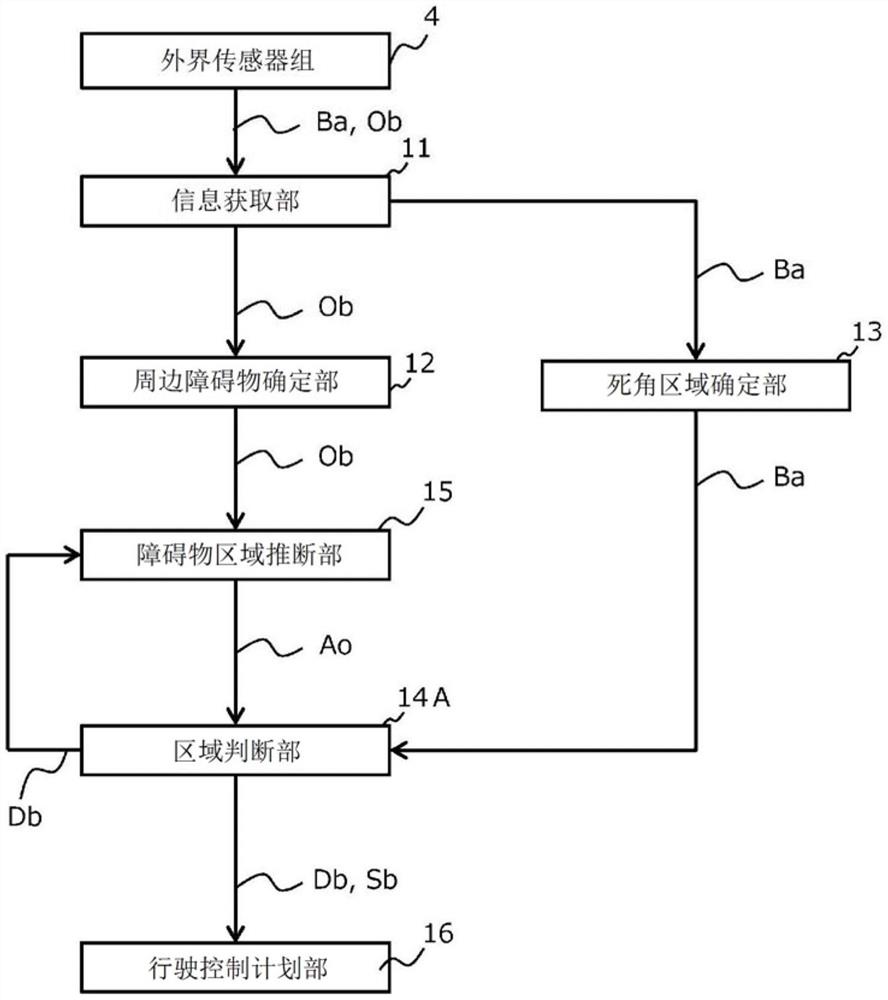
图13为表示变形例4中的行驶控制装置3所实现的功能的相关关系的图。
具体实施方式
-实施方式-
下面,参考图1~图11,对行驶控制装置的实施方式进行说明。
(系统构成)
图1为表示包含本发明的实施方式的行驶控制装置3的车辆系统1的构成的功能框图。车辆系统1搭载于车辆2中。车辆系统1在对车辆2周边的行驶道路、周边车辆等障碍物的状况进行识别的基础上进行恰当的驾驶辅助或行驶控制。如图1所示,车辆系统1是包含行驶控制装置3、外界传感器组4、车辆传感器组5、执行器组6、HMI装置组7以及外部通信装置8而构成。行驶控制装置3、外界传感器组4、车辆传感器组5、执行器组6、HMI装置组7以及外部通信装置8由车载网络N加以连接。再者,以下有时也将车辆2称为“自身车辆”2,以与其他车辆相区分。
行驶控制装置3为ECU(Electronic Control Unit)。行驶控制装置3根据从外界传感器组4和车辆传感器组5提供的各种传感器信息等来生成用于车辆2的驾驶辅助或自动驾驶的行驶控制信息,并输出至执行器组6和HMI装置组7。行驶控制装置3具有处理部10、存储部30以及通信部40。行驶控制装置3周期性地例如每100ms执行一次后文叙述的处理。以下将该周期称为“处理周期”。
处理部10例如是包含中央运算处理装置即CPU(Central Processing Unit)而构成。但也可除了CPU还包含GPU(Graphics Processing Unit)、FPGA(Field-ProgrammableGate Array)、ASIC(application specific integrated circuit)等而构成,也可由其中任一方构成。
处理部10具有信息获取部11、周边障碍物确定部12、死角区域确定部13、风险判断部14、障碍物区域推断部15、行驶控制计划部16、行驶控制信息输出部17以及报知部18作为其功能。处理部10通过执行存储部30中存储的规定动作程序来实现这些功能。再者,风险判断部14以及障碍物区域推断部15的处理将在后文中参考图3等来详细说明。
信息获取部11经由车载网络N从连接于行驶控制装置3的其他装置获取各种信息,并储存至存储部30。例如,获取外界传感器组4所检测到的与车辆2周边的障碍物相关的信息即周边障碍物Ob、与外界传感器组4的死角区域相关的信息即死角区域Ba、与车辆传感器组5等所检测到的车辆2的运动和状态等相关的车辆信息、经由外部通信装置8等从车外获取的统计信息等。
周边障碍物确定部12视需要对信息获取部11所获取到的周边障碍物Ob进行补充。从外界传感器组4获取的周边障碍物Ob中有时包含重复或缺漏。在这样的情况下,周边障碍物确定部12例如除了获取到的障碍物信息以外,还根据过去例如前一处理周期内的风险判断部14等的运算结果来一边进行信息的统合或插补一边推断可能性最高的周边障碍物的状态,确定为周边障碍物信息。周边障碍物确定部12的处理通常称为融合处理。但周边障碍物确定部12也可直接输出从外界传感器组4获取到的周边障碍物Ob。此外,周边障碍物确定部12也可视需要对从外界传感器组4获取到的周边障碍物Ob实施坐标变换。本实施方式中为简化说明,周边障碍物确定部12是直接输出外界传感器组4所输出的周边障碍物Ob。
死角区域确定部13根据信息获取部11获取到的死角区域Ba来确定车辆2周边的死角区域。关于从外界传感器组4获取的死角区域Ba,例如可通过OGM(Occupancy Grid Map)之类的栅格状图表现等来表现死角区域本身,也可像外界传感器组4的检测范围(角度、距离等)与检测信息的组那样来表现确定死角区域所需的信息。所谓外界传感器组4的检测信息,例如为LiDAR(Light Detection And Ranging)所获取的点云数据。
死角区域确定部13也可直接输出从外界传感器组4获取到的死角区域Ba。此外,死角区域确定部13也可视需要对从外界传感器组4获取到的死角区域Ba实施坐标变换。本实施方式中为简化说明,死角区域确定部13是直接输出外界传感器组4所输出的死角区域Ba。
区域判断部14A判断死角区域确定部13所确定的死角区域Ba是否安全,即,是临时危险死角区域tDb还是临时安全死角区域tSb。再者,此处所说的死角区域Ba、临时危险死角区域tDb以及临时安全死角区域tSb是概念性的,均为区域的集合。也设想整个死角区域Ba为临时危险死角区域tDb或临时安全死角区域tSb的情况,但在本实施方式的范围内,将死角区域Ba的一部分判断为临时危险死角区域tDb,将死角区域Ba的剩余区域判断为临时安全死角区域tSb。
风险判断部14对区域判断部14A所判断的临时危险死角区域tDb的风险进行判断。在临时危险死角区域tDb的风险较小也就是判断为安全的情况下,风险判断部14将该区域视为安全死角区域Sb。在临时危险死角区域tDb的风险不小也就是判断为危险的情况下,风险判断部14将该区域视为危险死角区域Db。风险判断部14将临时安全死角区域tSb全部视为安全死角区域Sb。将风险判断部14的动作换句话来说就是,风险判断部14判断临时危险死角区域tDb是否安全,将判断为安全的区域从危险死角区域Db变更为安全死角区域Sb。
障碍物区域推断部15推断在周边障碍物确定部12中未被确定但有可能潜在性地存在障碍物的区域。该区域是风险判断部14以前判断为危险死角区域Db的区域与后文叙述的潜在障碍物移动过的范围的并集。
行驶控制计划部16主要根据风险判断部14所输出的危险死角区域Db及安全死角区域Sb来生成与车辆2的行驶控制相关的计划信息即行驶控制信息。所谓行驶控制信息,可为车辆2应行驶的轨道信息之类的成为控制执行器组6的基准的信息,也可为控制各执行器的控制指令值,例如在转向的情况下为成为目标横摆率等的信息。
行驶控制信息输出部17按照规定的通信规格将行驶控制计划部16所生成的行驶控制信息输出至行驶控制装置3的外部。在行驶控制装置3执行车辆2的行驶控制时,报知部18生成并输出应通知驾驶员或乘客的信息。
存储部30例如是包含HDD(Hard Disk Drive)、闪存、ROM(Read Only Memory)等存储装置、RAM等存储器而构成。存储部30储存供处理部10处理的程序、该处理所需的数据组等。此外,还作为处理部10执行程序时的主存储而用于暂时储存程序的运算所需的数据的用途。在本实施方式中,储存周边障碍物Ob、死角区域Ba、不可测出化障碍物Un、障碍物存在区域Ao、临时危险死角区域tDb、临时安全死角区域tSb、危险死角区域Db以及安全死角区域Sb作为用于实现行驶控制装置3的功能的信息。
所谓周边障碍物Ob,是与存在于车辆2周边的障碍物相关的信息。所谓死角区域Ba,是表示成为车辆2中搭载的外界传感器组4的死角的区域的信息。所谓不可测出化障碍物Un,是表示以前被外界传感器组4检测到但之后检测不到的障碍物的信息。所谓障碍物存在区域Ao,是表示推断存在障碍物的区域的信息。
所谓临时危险死角区域tDb,是表示为外界传感器组4的死角而且被推断为危险的临时区域的信息。其中,所谓“临时”,意指尚未最终决定,已最终决定的相同意义的区域为危险死角区域Db。所谓临时安全死角区域tSb,是表示为外界传感器组4的死角而且被推断为安全的临时区域的信息。其中,所谓“临时”,意指尚未最终决定,已最终决定的相同意义的区域为安全死角区域Sb。再者,危险死角区域Db内可能存在障碍物,将假定了存在的该障碍物称为“潜在障碍物”。
周边障碍物Ob及不可测出化障碍物Un可以使用各种表现形式,只要能确定障碍物即可。死角区域Ba、障碍物存在区域Ao、临时危险死角区域tDb、临时安全死角区域tSb、危险死角区域Db以及安全死角区域Sb可以使用各种表现形式,只要能确定区域即可。
如上所述,周边障碍物Ob、死角区域Ba、不可测出化障碍物Un、障碍物存在区域Ao、临时危险死角区域tDb、临时安全死角区域tSb、危险死角区域Db以及安全死角区域Sb各方为信息,但在以下的说明中,为方便起见,其内容也以同一名称来记载。例如,死角区域Ba是表示成为车辆2中搭载的外界传感器组4的死角的区域的信息,而有时也将成为车辆2中搭载的外界传感器组4的死角的区域本身称为死角区域Ba。
此外,虽未图示,但存储部30中还储存有与车辆2的运动和状态、计划等相关的数据的集合即车辆信息数据组。车辆信息数据组中包含信息获取部11获取到的由车辆传感器组5等检测到的车辆信息、由行驶控制计划部16生成的行驶控制信息等。车辆信息中例如包含车辆2的位置、行驶速度、操舵角、加速的操作量、制动的操作量、行驶路径等信息。
通信部40例如是包含遵循IEEE802.3或CAN(Controller Area Network)等通信规格的网卡等而构成。通信部40根据各种协议与车辆系统1中的其他装置进行数据的收发。
再者,本实施方式中是将通信部40与处理部10分开来记载,但也可在处理部10中执行通信部40的处理的一部分。例如,也可构成为通信处理中的相应硬件设备位于通信部40中、这以外的设备驱动组和通信协议处理等位于处理部10中。
外界传感器组4是检测车辆2周边的状态的装置的集合体。外界传感器组4例如有摄像机装置、毫米波雷达、LiDAR、声呐等。外界传感器组4检测距车辆2规定范围的障碍物、道路环境、交通规则等环境要素,并输出至车载网络N。所谓“障碍物”,例如为车辆2以外的车辆即其他车辆、行人、往道路的掉落物等。所谓“道路环境”,例如为白线、路端的位置、路面的状态等。所谓“交通规则”,例如为道路标识、信号灯等。
车辆传感器组5是检测车辆2的各种状态的装置的集合体。各车辆传感器例如检测车辆2的位置信息、行驶速度、操舵角、加速的操作量、制动的操作量等,并输出至车载网络N。
执行器组6是对决定车辆运动的操舵、制动、加速等控制要素进行控制的装置组。执行器组6根据驾驶员对方向盘、制动踏板、加速踏板等的操作信息和从行驶控制装置3输出的控制信息来控制车辆的运动。
HMI装置组7是用于进行来自驾驶员或乘客的对车辆系统1的信息输入、来自车辆系统1的对驾驶员或乘客的信息通知的装置组。HMI装置组7中包含显示器、扬声器、振动器、开关等。
外部通信装置8是与车辆系统1外部进行无线通信的通信模块。外部通信装置8例如能与向车辆系统1提供、发布服务的中心系统(未记载)或互联网通信。
图2为死角区域Ba的说明图。图2的(a)为说明状况的图,图2的(b)为表示与图2的(a)相对应的死角区域Ba的图。
在图2的(a)所示的例子中,车辆2的外界传感器组4由5个传感器构成,各传感器最大能检测符号111~115的范围的障碍物。但在存在障碍物的情况下,无法检测到该障碍物的远方是否存在更多障碍物。图2的(a)中,白色区域表示外界传感器组4检测到不存在障碍物的范围,划有影线的区域表示外界传感器组4无法检测障碍物的范围也就是外界传感器组4的死角。
如图2的(a)所示,外界传感器组4的死角是外界传感器组4的检测范围外即符号121、122以及124所示的区域与被作为障碍物的其他车辆100遮蔽的区域123合在一起的区域。再者,作为外界传感器组4的检测范围外的死角大致分为像区域124这样虽然是外界传感器组4能够检测的方向但因距离远而产生的死角和像区域121及区域122这样因原本就是外界传感器组4无法检测的方向而产生的死角这两种。关于在距离原因下产生的死角,由于外界传感器组4能保证障碍物的检测的范围大多根据天气状态等行驶环境而变化,因此,较理想为外界传感器组4根据行驶环境来动态地算出检测范围。
图2的(b)是与图2的(a)相对应的网格图,展示了在图2的(a)所示的状况下外界传感器组4所输出的死角区域Ba的一例。图2的(b)利用以车辆2的当前位置为中心的x-y坐标系加以规定,是在规定区域内以栅格状图的形式来表现分别以变量表示x、y的坐标值(x,y)的各位置上的外界传感器组4的检测状态的图。检测状态例如以“有障碍物(已检测)”“无障碍物(已检测)”“不明(未检测)”这3个值来表现。在图2的(b)所示的例子中,死角区域相当于“不明(未检测)”。
图2的(b)中,车辆100的周围表示“有障碍物(已检测)”,图2的(a)中任一划有影线的区域表示“不明(未检测)”,白色区域表示“无障碍物(已检测)”。此处展示了3个值的例子,但也能以连续值(0~1的小数)的形式来表现存在障碍物的概率而代替检测状态这一离散值。死角区域Ba能以图2的(b)所示的栅格状图的栅格单位来表现,也能以多个网格的集合体来表现。此外,死角区域Ba也能以栅格状图以外的形式来表现,例如,也可像图2的(a)的区域122或区域123那样以形状来表现。在本实施方式中的后面的说明中,为简化说明,以形状而不是栅格状图来表现死角区域Ba。
(功能的概要)
图3为表示行驶控制装置3所实现的功能的相关关系的图。再者,外界传感器组4不是行驶控制装置3所实现的功能,但记载于图3中,以明示相关关系。信息获取部11从外界传感器组4获取周边障碍物Ob和死角区域Ba,并输出至周边障碍物确定部12及死角区域确定部13。周边障碍物确定部12视需要对获取到的周边障碍物Ob进行补充处理,并将周边障碍物Ob输出至风险判断部14及障碍物区域推断部15。死角区域确定部13视需要对获取到的死角区域Ba进行补充处理,并将死角区域Ba输出至区域判断部14A。
障碍物区域推断部15从周边障碍物确定部12输入周边障碍物Ob,从风险判断部14输入危险死角区域Db。障碍物区域推断部15将潜在障碍物的移动区域与危险死角区域Db合在一起的区域作为障碍物存在区域Ao输出至区域判断部14A。从周边障碍物Ob的时间序列的差分和危险死角区域Db各方提取潜在障碍物。假如在不存在危险死角区域Db而且跨及多个处理周期都未检测到周边障碍物Ob的情况下,则不存在障碍物存在区域Ao,也就是成为空集合。但在存在危险死角区域Db及周边障碍物Ob中的一方的情况下,障碍物存在区域Ao便不会成为空集合。
使用周边障碍物Ob的时间序列的差分的潜在障碍物的提取例如可以通过验证前一处理周期内的周边障碍物Ob与最新处理周期内的周边障碍物Ob的对应关系来实现。即,可以判断在前一处理周期内存在但在最新处理周期内消失的障碍物被其他障碍物挡住也就是变成了潜在障碍物。使用危险死角区域Db的潜在障碍物的提取是以对自身车辆2的风险达到最高的方式在危险死角区域Db的内部算出。例如,在危险死角区域Db的内部而且是与自身车辆2的距离最近的位置上算出。
区域判断部14A从死角区域确定部13输入死角区域Ba,从障碍物区域推断部15输入障碍物存在区域Ao。区域判断部14A将障碍物存在区域Ao与死角区域Ba的重复区域即积集视为临时危险死角区域tDb,将死角区域Ba当中与障碍物存在区域Ao不重复的区域视为临时安全死角区域tSb。区域判断部14A将临时危险死角区域tDb和临时安全死角区域tSb输出至风险判断部14。
图4为表示区域判断部14A的判断内容的图。图4中,上部所示的粗虚线的圆表示障碍物存在区域Ao,下部所示的细实线的圆表示死角区域Ba。两者的积集也就是图示中央所示的斜影线的区域为临时危险死角区域tDb。死角区域Ba当中与障碍物存在区域Ao不重复的区域也就是图示下部的点影线的区域为临时安全死角区域tSb。
风险判断部14从区域判断部14A输入临时危险死角区域tDb和临时安全死角区域tSb,从信息获取部11输入周边障碍物Ob。风险判断部14使用周边障碍物Ob来判断临时危险死角区域tDb的风险,生成危险死角区域Db和安全死角区域Sb。风险判断部14从临时危险死角区域tDb内将判断为安全的区域去掉而生成危险死角区域Db。风险判断部14对临时安全死角区域tSb添加判断为安全的临时危险死角区域tDb而生成安全死角区域Sb。风险判断部14将危险死角区域Db和安全死角区域Sb各方输出至行驶控制计划部16,将危险死角区域Db输出至障碍物区域推断部15。再者,障碍物区域推断部15在下一处理周期内利用接收到的危险死角区域Db。
使用图5~图11,对车辆系统1的动作进行说明。行驶控制装置3根据从外界传感器组4等获取到的信息来判断存在于车辆2周围的死角区域的风险,生成并输出车辆2的行驶控制信息。执行器组6按照行驶控制装置3所输出的行驶控制信息来控制车辆2的各执行器,由此实现车辆2的行驶控制。此外,行驶控制装置3在车辆2的行驶控制时生成HMI信息作为应通知驾驶员或乘客的信息,并输出至HMI装置组7。由此,可以让驾驶员认识到行驶上的风险而督促安全驾驶或者将自动行驶中的车辆系统1的状态提示给驾驶员或乘客。
图5为表示行驶控制装置3的处理的流程图。行驶控制装置3周期性地例如每100ms执行一次以下所说明的S301~S306的处理。此外,为了明示处理周期的前后关系,使用了概念性的时刻“t”。例如,在将某一处理周期内的外界传感器组4的输出表示为死角区域Ba(t)的情况下,其前一处理周期内的外界传感器组4的输出表示为死角区域Ba(t-1)。
首先,在S301中,信息获取部11经由车载网络N从其他装置获取必要信息,并储存至存储部30。所谓各种信息,是外界传感器组4所检测到的与车辆2周边的障碍物相关的信息即周边障碍物Ob、与外界传感器组4的死角区域相关的信息即死角区域Ba、车辆传感器组5等所检测到的与车辆2的运动和状态等相关的车辆信息、以及经由外部通信装置8等从车外获取的统计信息等。
然后,在S302中,周边障碍物确定部12进行基于S301中获取到的周边障碍物Ob、上一次处理周期内周边障碍物确定部12所确定的周边障碍物Ob等的融合处理,确定本次处理周期内的周边障碍物Ob。再者,周边障碍物确定部12在上一次处理周期内确定的周边障碍物Ob储存在存储部30中。
在S303中,死角区域确定部13根据S301中获取到的死角区域Ba来确定本次处理周期内的死角区域Ba并储存至存储部30。在从外界传感器组4仅输出检测范围(角度、距离等)和检测信息等该处理周期内的状态的情况下,较理想为与上一次处理周期内确定的死角区域Ba组合来推断在概率上可能性最高的检测状态而判断死角区域Ba。
在S304中,行驶控制装置3根据S302及S303中确定的周边障碍物Ob及死角区域Ba来执行进行死角区域Ba的风险判断的死角区域风险判断处理。S304的详情将使用图4于后文叙述,通过S304的处理,算出危险死角区域Db及安全死角区域Sb。在S305中,行驶控制计划部16根据S302~S304中确定的周边障碍物Ob、死角区域Ba、危险死角区域Db以及安全死角区域Sb来生成行驶控制信息,行驶控制信息输出部17将行驶控制信息经由网络输出至执行器组6。最后,在S306中,报知部18生成HMI信息作为应通知驾驶员或乘客的信息,并经由网络将该信息输出至HMI装置组7。
(死角区域风险判断处理)
图6为说明图5的S304中执行的死角区域风险判断处理的流程图。首先,在S401中,障碍物区域推断部15从存储部30获取周边障碍物确定部12在上一次处理周期内确定的周边障碍物(t-1)。然后,在S402中,障碍物区域推断部15从存储部30获取周边障碍物确定部12在本次处理周期内确定的周边障碍物(t)。然后,在S403中,障碍物区域推断部15从存储部30获取风险判断部14在上一次处理周期内确定的危险死角区域Db(t-1)。
然后,在S404中,障碍物区域推断部15根据S401中获取到的周边障碍物(t-1)和S402中确定的周边障碍物(t)来提取不可测出化障碍物Un(t-1)。所谓不可测出化障碍物Un(t-1),是周边障碍物(t-1)中不包含在本次处理周期内确定的周边障碍物(t)中的障碍物。推测到上一次处理周期为止被检测为障碍物但在本次处理周期内检测不到的障碍物进入了死角区域,为了在后面的处理中加以利用,而作为不可测出化障碍物Un(t-1)加以提取。
然后,在S405中,障碍物区域推断部15根据S402、S403以及S404中分别确定的危险死角区域Db(t-1)和不可测出化障碍物Un(t-1)来推断障碍物存在区域Ao。关于在上一次处理周期内被判断为可能存在障碍物的危险死角区域Db(t-1),考虑到存在静止障碍物的可能,有可能在本次处理周期内也存在障碍物。因此,危险死角区域Db(t-1)至少包含在障碍物存在区域Ao内。
另一方面,上一次处理周期到本次处理周期之间已经过了规定时间,因此,在障碍物会移动的情况下,其移动范围内也可能存在潜在障碍物。因此,根据上一次处理周期内的不可测出化障碍物Un的状态值例如相对位置、速度以及加速度等来算出到本次处理周期为止潜在障碍物可能移动的区域。继而,将危险死角区域Db(t-1)与潜在障碍物可能移动的区域合在一起的区域推断为障碍物存在区域Ao。
在S406中,区域判断部14A根据S303中确定的死角区域Ba(t)和S405中求出的障碍物存在区域Ao来推断临时危险死角区域tDb(t)及临时安全死角区域tSb(t)。像参考图4说明过的那样,本处理中,是以集合的积或差的形式算出。
行驶控制中最优先的是安全性,因此,死角区域内是否可能存在障碍物的判断的理想方针如下:只要有少许可能,便判断可能存在障碍物。因此,以如下方式算出障碍物存在区域Ao:除了在上一次处理周期内判断可能存在障碍物的死角区域即危险死角区域Db(t-1)以外,还包含到本次处理周期为止潜在性的障碍物可能到达的所有区域。因此,不存在潜在性的障碍物也进入与障碍物存在区域Ao(t)不重复的死角区域(t)的可能,从而能安全地判断不存在障碍物。
但是,当往安全方面进行判断时,始终倾向于判断可能存在障碍物。因此,在S407中,风险判断部14通过别的方法对S406中判断的临时危险死角区域tDb(t)进行安全性判断。具体而言,假定临时危险死角区域tDb(t)内存在障碍物,在该情况下,在外界传感器组4等检测到的其他障碍物的行为与该假定发生矛盾时,判断该临时危险死角区域tDb(t)内不存在障碍物。在该情况下,该临时危险死角区域tDb(t)被判断为安全死角区域Sb(t)。
例如,在某一周边障碍物曾以无法停止的速度前往临时危险死角区域tDb(t)的情况下,若假定该临时危险死角区域tDb(t)内存在障碍物,则该周边障碍物会撞上假定的障碍物。周边障碍物也理应是以不撞到其他障碍物的方式在运动,因此该假定出现矛盾。因此,可以判定该临时危险死角区域tDb(t)内不存在障碍物。详情于后文叙述。
最后,在S408中,风险判断部14生成危险死角区域Db(t)及安全死角区域Sb(t)。具体而言,风险判断部14将S406中推断出的临时危险死角区域tDb(t)当中的在S407中被判断为安全的区域去掉来得到危险死角区域Db(t)。此外,风险判断部14对S406中推断出的临时安全死角区域tSb(t)加上在S407中被判断为安全的临时危险死角区域tDb(t)来得到安全死角区域Sb(t)。
再者,在S405中,能以网罗潜在障碍物的任何可能性的方式生成多个潜在障碍物,但就实用性而言,大多可以通过生成对于车辆2而言风险最大的潜在障碍物来应对。例如,若是针对超车道的车道变更时的车道变更目的地后方的死角区域,则设想从该死角区域的交界以能设想的最大速度冲出来的赶超车辆。此外,例如若是对向车道前方的死角区域,则设想从该死角区域的交界以能设想的最大速度开来的对向车辆。关于这些内容,只要在该设想下作好风险判断,则对于风险低于该设想的情况例如速度低于上限速度的潜在障碍物也能加以应对。
如上所述,S304所示的死角区域风险判断处理是根据上一次处理中判断的信息、S302中确定的周边障碍物信息、以及S303中确定的死角区域信息来判断死角区域内的障碍物的存在有无。
(第1动作例)
参考图7~图11,对3个动作例进行说明。首先,在参考图7~图8的第1动作例中,对死角区域风险判断处理S304的S405~S407的具体动作进行说明。
图7为说明动作例的状况的图,展示了两车道的道路中正在普通车道上行驶的自身车辆2尝试往图示右侧的超车道变更车道的场景。图7的(a)展示时刻T的状态,图7的(b)展示时刻T之后的时刻即时刻T+δ的状态。
在图7的(a)所示的时刻T,车辆2正在拥挤的普通车道上行驶。具体而言,以与车辆2同等的速度在车辆2的同一车道的前方行驶有其他车辆501、在后方行驶有其他车辆502、503。此外,在邻接的超车道的后方以比车辆2快的速度行驶有其他车辆504。车辆2的外界传感器组4的构成与图2的(a)相同,形成有区域121、122那样的死角区域。此外,在车辆2的后方,其他车辆502成为遮蔽物,形成了区域510所示的死角区域。因此,在时刻T,为从车辆2无法检测到其他车辆503、其他车辆504的状态。再者,由于其他车辆502正在行驶车道的偏右侧行驶,因此区域510往图示右侧较大程度地扩大。
在图7的(b)所示的时刻T+δ,普通车道上无特别变化,车辆2及其他车辆501~503在以同等速度行驶。另一方面,在超车道上,速度比车辆2快的其他车辆504已靠近到了车辆2后方极近处,进入了死角区域121内。在图7的(a)所示的状况到图7的(b)所示的状况的转变过程中,在车辆2的外界传感器组4未能检测到其他车辆504的情况下,行驶控制装置3有无法准确地评价死角区域121的危险性的担忧。具体而言,行驶控制装置3在图7的(b)所示的状况下有判断死角区域121内不存在任何车辆的担忧。若是如此判断,则车辆2会尝试车道变更而有与其他车辆504发生碰撞的危险。该问题例如通过以下方式来解决。
图8的(a)为表示图7的(a)之前的时刻即时刻T-α下的死角区域风险判断处理的结果的图,图8的(b)为表示图7的(a)与图7的(b)之间的时刻下的死角区域风险判断处理的结果的图。再者,图8中没有记载车辆2的外界传感器组4未检测到的障碍物即其他车辆503及其他车辆504。此外,符号601所示的车辆为假想车辆,并不表示图7中的其他车辆504本身。图8的(b)中,还存在分割为区域121a和区域121b来说明区域121的情况。区域121a是以与区域122相同的影线来表示的区域,区域121b是以栅格状影线来表示的区域。
图8的(a)展示了图7的(a)之前的时刻即时刻T-α下的死角区域风险判断处理的情形。与图5的(a)所示的时刻T的场景相比,车辆502位于略微远离车辆2的位置,因此死角区域121与死角区域510之间的空间较宽。
沿着图6的流程图,对图8的(a)所示的状况下的行驶控制装置3的判断的流程进行说明。在S401~S403中,行驶控制装置3获取信息。再者,S401中获取的周边障碍物Ob(t-1)与S402中获取的周边障碍物Ob(t)中没有障碍物的增减。此外,S403中获取的危险死角区域Db(t-1)仅为区域510,区域121及区域122被判断为安全死角区域Sb(t-1)。在S404中,行驶控制装置3进行不可测出化障碍物Un(t-1)的提取,但由于周边障碍物Ob(t-1)与周边障碍物Ob(t)中没有障碍物的增减,因此提取不到不可测出化障碍物Un(t-1)。
因此,S405中推断的障碍物存在区域Ao是上一次处理周期内的死角区域510与从上一次处理周期起到本次处理周期为止潜在障碍物601可能移动的区域611合在一起的区域。从上一次处理周期起到本次处理周期为止潜在障碍物601可能移动的区域611可以通过能设想的最大速度与处理周期的积例如法定速度的2倍与100ms的积来算出。再者,潜在障碍物601不限定于1个,例如除了图6的(a)所示的位置以外,也可同时设想从其他车辆502的后方极近处往右前方前进的潜在障碍物601。在图8的(a)所示的例子中,从上一次处理周期起到本次处理周期为止潜在障碍物601可能移动的区域611未到达死角区域121。
在S406中,区域判断部14A对S405中算出的障碍物存在区域Ao与死角区域Ba(t)即死角区域121、122、510进行对照,推断临时危险死角区域tDb及临时安全死角区域tSb。在该例中,与障碍物存在区域Ao重复的死角区域仅为死角区域510,因此临时危险死角区域tDb(t)为死角区域510。
在S407中,风险判断部14无法检测到接近临时危险死角区域tDb(t)的车辆,因此不进行特别处理。在接下来的S408中,风险判断部14将临时危险死角区域tDb(t)作为危险死角区域Db(t)输出,将临时安全死角区域tSb作为安全死角区域Sb输出,结束死角区域风险判断处理。
对图8的(b)所示的状况下的行驶控制装置3的判断的流程进行说明。在图8的(b)中,与图8的(a)所示的状况相比,车辆502靠近了车辆2,死角区域121与死角区域520之间的空间较窄。S401~S404的处理与图8的(a)的情况相同,因此省略说明。在S405中,障碍物区域推断部15算出障碍物存在区域Ao,在图8的(b)所示的状况下,由于死角区域121与死角区域520之间较窄,因此潜在障碍物602可能移动的区域621到达了死角区域121。障碍物区域推断部15将死角区域520与区域621合在一起的区域作为障碍物存在区域Ao。
因此,在接下来的S406中,区域判断部14A不仅将死角区域520还将死角区域121判断为危险死角区域Db。即,区域判断部14A将死角区域确定部13所确定的死角区域Ba当中的不仅是与障碍物存在区域Ao重复的区域121b还有区域121a判断为危险死角区域。再者,区域121a也可称为与障碍物存在区域Ao不重复但和与障碍物存在区域Ao重复的区域121b连续的区域。
死角区域121被判断为有潜在性地存在障碍物的风险,因此在图5的S305的行驶控制信息生成及输出处理中,避免危险的车道变更。再者,为了简化处理,像前文所述那样将整个死角区域121判断为危险死角区域Db比较有效,但在重视严格性的情况下,可不含区域121a而将区域621与死角区域121的重复区域121b判断为危险死角区域Db。
如上所述,在本实施方式中,行驶控制装置3将外界传感器组4无法检测的潜在性的障碍物的行为也考虑进去,由此,能在不漏掉死角区域内的障碍物的存在可能性的情况下进行判断,所以能提高车辆的行驶控制的安全性。
(第2动作例)
参考图9~图10,对作为S407的安全性判断处理的具体例的第2动作例进行说明。图9展示了车辆2正在视线较差的弯道上行驶的场景。在前方的弯道区域内,脱离了车辆2的外界传感器组4的检测范围111~113的区域701成为死角区域。再者,如以下所说明,车辆711是设想存在的车辆而不论是否实际存在,并非由外界传感器组4检测到的车辆。
在图9所示的场景下,当执行S304所示的死角区域风险判断处理时,无法验证安全性的死角区域701成为危险死角区域Db。被设想为最危险的可能存在于死角区域701内的潜在障碍物是在无法检测的区域内离自身车辆2最近而且因停车而相对速度大的车辆也就是死角区域701的交界部处的停止车辆711。因此,车辆2在图5的S305即行驶控制信息生成及输出处理中,以即便在存在潜在障碍物即停止车辆711的情况下也能安全地规避或停止的方式对行驶进行控制。例如在图9所示的场景下,行驶控制装置3降低速度来行驶。
图10的(a)展示车辆2的外界传感器组4检测到了先行车辆812的状况。在该状况下,也在图6的S406中将整个死角区域701推测为临时危险死角区域tDb。
但在图10所示的状况下,先行车辆812存在于死角区域701的交界附近,正朝死角区域701行驶。此时,若假定图7的停止车辆711的存在,则先行车辆812会撞到停止车辆711。认为先行车辆812也是以不撞到障碍物的方式行驶,因此假定潜在障碍物711的存在便与外界传感器组4检测到的先行车辆812的行为发生矛盾。因此推测不存在停止车辆711。
这表示当改变视角时,在像图10的(b)的区域802那样先行车辆812避不开行驶的区域内不可能存在潜在障碍物。所谓避不开行驶的区域,例如是即便执行规定减速度的制动也停不下来的区域。如此,在S407中,根据与外界传感器组4检测到的障碍物的行为的矛盾,判断死角区域的一部分的安全性。结果,在图10所示的场景下,设想潜在障碍物的位置变为符号811的位置,相较于图9的例子而言往行进方向的前方移动。
与图9的场景相比,相对于潜在障碍物的距离扩大,因此,在图5的S305中,针对潜在障碍物的速度制约得以缓和。因此,车辆2能以比图9的场景快的速度行驶。实际上,是将与先行车辆812的碰撞风险也考虑进去来控制车辆2的速度,因此,在先行车辆812的速度较低的情况下,车辆2的速度必然不会提升,而在先行车辆812的速度比图9中的车辆2的速度快的情况下,认为图10的状况下车辆2的速度将提高。
再者,上述说明中是将检测到的车辆812避不开行驶的区域判断为安全,但也可将检测到的车辆812的规定时间的移动预测区域判断为安全。人大多是以周围的车辆等障碍物不怎么从当前时间点的状态发生变化为前提的。其原因在于,人通常是一边不断预测周边的状况一边以避免导致乘坐品质变差的剧烈行驶变化的方式来驾驶。因此,通过根据障碍物今后的移动预测来进行风险评价,能够期待实现接近人的驾驶的行驶控制。
(第3动作例)
图11展示了单侧两车道的道路中车辆2正在普通车道上行驶的场景的时间序列变化,首先是图11的(a)所示的状态,接着变为图11的(b)所示的状态,最后变为图11的(c)所示的状态。车辆2具有死角区域121及死角区域122。在图11的(a)所示的场景下,死角区域121被判断为危险死角区域Db,死角区域122被判断为安全死角区域Sb。在图11的(a)~图11的(c)这所有的图中,其他车辆902都是在不同于车辆2的超车道上行驶。图11的(a)中,其他车辆902相较于自身车辆2而言位于后方,其他车辆902正以比自身车辆2快的速度行驶。
图11的(b)中,其他车辆902相较于自身车辆2而言位于后方,但相较于图11的(a)而言,其他车辆902在接近车辆2。在该状态下,若假定死角区域121内存在障碍物,则其他车辆902会撞到该障碍物,从而出现矛盾。也就是表示假定有误,可以判断死角区域121内不存在障碍物。
在像图11的(c)所示那样其他车辆902通过死角区域121而相较于自身车辆2而言已移动到前方的情况下,也可以通过与其他车辆902的位置跟踪或者障碍物相对于死角区域121的进出监视等现有技术组合而鉴定为同一障碍物,从而判断死角区域121内不存在障碍物。此外,图11的(c)中,正以相对高速行驶的其他车辆902的后方极近处存在别的障碍物这一情况从安全上来看是不可能发生的,出于这一观点,也可以判断死角区域121的超车道上不存在障碍物。
根据上述实施方式,获得以下作用效果。
(1)作为电子控制装置的行驶控制装置3搭载于车辆2中。行驶控制装置3具备:周边障碍物确定部12,其根据车辆2中搭载的外界传感器组4的输出来确定存在于车辆2周边的障碍物;死角区域确定部13,其确定不包含在周边障碍物确定部12的检测范围内的死角区域Ba;区域判断部14A,其将死角区域Ba分类为可能存在障碍物的临时危险死角区域tDb和不存在障碍物的临时安全死角区域tSb;以及障碍物区域推断部15,其推断潜在障碍物在当前时刻可能存在的区域即障碍物存在区域Ao,所述潜在障碍物是指在过去时刻可能存在于在过去时刻也就是以前的处理周期内分类出的危险死角区域Db内的潜在性的障碍物。区域判断部14A将死角区域确定部13所确定的死角区域Ba当中至少与障碍物存在区域Ao重复的区域判断为临时危险死角区域tDb。因此,行驶控制装置3将外界传感器组4无法检测的潜在障碍物也考虑进去来算出危险死角区域Db,因此安全性提高。
(2)区域判断部14A将死角区域确定部13所确定的死角区域Ba当中的与障碍物存在区域Ao重复的区域121b以及虽与障碍物存在区域Ao不重复但和与障碍物存在区域Ao重复的区域121b连续的区域121a判断为临时危险死角区域tDb,将死角区域Ba当中与障碍物存在区域Ao不重复的区域而且是与障碍物存在区域Ao不连续的区域122判断为安全死角区域。
(3)行驶控制装置3具备风险判断部14,所述风险判断部14判断区域判断部14A所分类出的临时危险死角区域tDb是否安全,将判断为安全的区域从危险死角区域Db变更为安全死角区域Sb,换句话说,就是将判断为安全的临时危险死角区域tDb变更为安全死角区域Sb。因此,能够避免过度考虑实际不存在的风险这一情况。
(4)障碍物区域推断部15使用经风险判断部14变更后的危险死角区域Db来推断障碍物存在区域Ao。因此,能够避免过度考虑实际不存在的风险这一情况。
(5)风险判断部14在判断周边障碍物确定部12所检测到的障碍物有与潜在障碍物发生碰撞的危险的情况下,将该危险死角区域tDb判断为安全死角区域Sb。
(6)风险判断部14将预测周边障碍物确定部12所检测到的障碍物会在规定时间以内行驶的危险死角区域Db判断为安全。例如图11的(b)中,将预料其他车辆902会行驶的行驶区域912与作为危险死角区域Db的区域121的重复区域判断为安全。因此,可以利用外界传感器组4所检测到的障碍物来判断临时危险死角区域tDb的风险。
(7)风险判断部14根据周边障碍物确定部12所检测到的障碍物的位置及速度来推断障碍物在规定时间以内会行驶的行驶区域,将与行驶区域重复的危险死角区域Db以及和与行驶区域重复的危险死角区域Db连续的危险死角区域Db判断为安全。例如图11的(b)中,将(1)预料其他车辆902会行驶的行驶区域912与作为危险死角区域Db的区域121的重复区域以及(2)与该重复区域连续的危险死角区域Db这两方判断为安全。即,若将(1)与(2)合在一起,则将整个区域121判断为安全。因此,能高效地进行区域的安全性的判断。
(8)死角区域确定部13从外界传感器组4获取与周边障碍物确定部12的检测范围相关的信息来确定死角区域Ba。因此,行驶控制装置3可以利用外界传感器各自所具有的检测范围的信息。
(9)行驶控制装置3具备对车辆2的行驶进行控制的行驶控制计划部16。行驶控制计划部16根据风险判断部14的判断结果来改变车辆2的控制。因此,行驶控制装置3可以将车辆2中搭载的传感器组4无法检测的潜在障碍物也考虑进去来控制车辆2。
(10)行驶控制计划部16以能够避开可能存在于危险死角区域Db内的潜在障碍物的方式控制车辆2的行驶。因此,行驶控制装置3能够避开传感器组4无法检测的潜在障碍物。
如上所述,根据本实施方式,在假定死角区域内存在障碍物的情况下,在外界传感器组4等检测到的障碍物的行为与假定发生了矛盾时,判断该死角区域内不存在障碍物。由此,能够避免过度考虑实际不存在的风险这一情况,所以能在担保安全性的情况下实现更自然、舒适的车辆的行驶控制。
(变形例1)
S407所示的危险死角区域Db的安全性判断处理除了上述实施方式以外还可以采取各种方法。例如,也能以如下方式利用自身车辆2的速度变化。即,在图11所示的场景下,死角区域121和死角区域122在长时间内成为危险死角区域Db的是其他车辆以与车辆2同等的速度并排行驶的情况。
在车辆2的速度无变化的情况下,存在其他车辆同样地并排行驶的可能,但在车辆2存在规定次数以上的、规定程度以上的速度变化的情况下,难以认为其他车辆正同样地改变速度来并排行驶。因此,在图5的S305即行驶控制信息生成及输出处理中,在即便有意地执行规定次数以上的使车辆2的速度作规定程度以上的变化这一操作也未从该死角区域检测到障碍物的情况下,可判断该死角区域内不存在障碍物。
根据该变形例1,获得以下作用效果。
(11)对于存在于车辆2侧面的临时危险死角区域tDb,在车辆2的规定程度以上的速度变化为规定次数以上的情况下,风险判断部14将该临时危险死角区域tDb判断为安全。因此,行驶控制装置3能够简易地判断临时危险死角区域tDb的安全性。再者,在该变形例1中,也可进一步对速度变化组合时间的概念。即,在针对存在于车辆2侧面的临时危险死角区域tDb而以规定程度以上的频次进行了规定程度以上的速度变化的情况下,在以规定程度以上的变化执行了车辆2的规定程度以上的速度变化时,风险判断部14可将该临时危险死角区域tDb判断为安全。
(变形例2)
图5的S305即行驶控制信息生成及输出处理中,也可根据死角区域内存在障碍物的概率来变更控制方法。例如,可以采用适应性的控制,即,在前方的死角区域内存在障碍物的可能性较高的情况下,抑制速度而重视安全性,在可能性较低的情况下,提高速度而重视舒适性。在该情况下,死角区域风险判断处理较理想为以存在概率进行判断而不是以二值来判断死角区域内的障碍物的存在有无。
例如根据统计信息数据组等来判断存在概率。所谓统计信息数据组,例如是由国家或企业团体根据车辆的行驶历史数据对因死角而导致的事故风险、例如评价了视线差的弯道上的追尾或者从死角的冲出等的事故未遂的事例进行统计处理得到的数据库。在符合在统计上表现出高风险的地点或时段的死角区域内较高地设定障碍物的存在概率,由此,在高风险的地点或时段内能够更加安全地进行行驶控制。统计信息数据组可预先储存在存储部30中,也可经由外部通信装置8从外部获取。此外,统计信息数据组也可根据车辆2的行驶历史来加以制作。
图12为本变形例中的行驶控制装置3的功能框图。与图1相比,图12中对处理部10追加了统计信息获取部19。统计信息获取部19从存储部30获取统计信息。在本变形例中,风险判断部14除了实施方式的判断以外,还根据当前时段和车辆2的位置以及统计信息来推断死角区域内的障碍物的存在概率。
根据该变形例2,获得以下作用效果。
(12)风险判断部14以危险死角区域Db为对象来推断可能存在障碍物的概率即障碍物存在概率,根据障碍物存在概率来判断危险死角区域Db是否安全。因此,行驶控制装置3以概率方式来表现死角区域内的障碍物的存在可能性,由此,能够实现考虑了安全性与舒适性的平衡的、适应性的行驶控制。
(13)行驶控制装置3具备统计信息获取部19,所述统计信息获取部19获取死角区域内存在障碍物的风险程度相关的统计信息。风险判断部14根据统计信息获取部所获取到的统计信息来推断障碍物存在概率。因此,根据死角区域内存在障碍物的风险程度与地点和时段关联而成的统计信息来推断死角区域内的障碍物的存在概率,由此,在统计上的高风险地点和时段内能够更加安全地进行行驶控制。
(变形例3)
在图5的S306即HMI信息生成及输出处理中生成、输出的HMI信息较理想为反映出死角区域风险判断处理的判断结果。例如,在图2的(b)所示那样的栅格状图中,考虑表现出危险死角区域Db和潜在障碍物。危险死角区域Db的算出中包含S406和S407的推断处理,因此并不表示外界传感器组4的检测状态本身。例如,在图8所示的例子中可见到如下情形:在图8的(a)的状况下死角区域121没有表现为危险死角区域Db,而在图8的(b)的状况下则表现为危险死角区域Db。
此外,在图10或图11的行驶场景下可见到如下情形:根据其他障碍物的行为,此前表现为危险死角区域Db的区域的一部分被判断为安全,以安全的区域的形式加以表现。进而,还同时显示潜在障碍物,由此,驾驶员或乘客能够理解车辆系统1正在考虑何种潜在性的风险来进行行驶控制,从而能期待消除伴随自动行驶而来的不谐调感的效果。
根据该变形例3,获得以下作用效果。
(14)行驶控制装置3具备报知部18,所述报知部18输出与风险判断部14所判断的危险死角区域Db相关的信息。因此,能让车辆2的乘客知晓存在于车辆2周围的危险死角区域Db。
(变形例4)
在上述实施方式中,行驶控制装置3具备风险判断部14作为其功能。但行驶控制装置3也可不具备风险判断部14。在该情况下,由区域判断部14A输出危险死角区域Db及安全死角区域Sb。即,在本变形例中,不存在临时危险死角区域tDb及临时安全死角区域tSb。
图13为表示变形例4中的行驶控制装置3所实现的功能的相关关系的图。在本变形例中,区域判断部14A将危险死角区域Db及安全死角区域Sb输出至行驶控制计划部16。此外,区域判断部14A将危险死角区域Db输出至障碍物区域推断部15。
根据该变形例4,由于不具备风险判断部14,因此不同于实施方式,无法避免风险的过度考虑,但可以将外界传感器组4无法检测的潜在障碍物也考虑进去来算出危险死角区域Db。
(变形例5)
在上述实施方式中,外界传感器组4不仅输出周边障碍物Ob还输出死角区域Ba。但外界传感器组4也可仅输出周边障碍物Ob。在该情况下,行驶控制装置3使用周边障碍物Ob以及车辆传感器组5的输出等来算出死角区域Ba。像参考图2说明过的那样,死角区域Ba是外界传感器组4的检测范围外的区域与被障碍物遮蔽的区域合在一起的区域。
行驶控制装置3例如可以从车辆传感器组5获取车辆2的外界环境的温度和天气等信息,使用已知的外界环境与外界传感器组4的检测范围的关系来算出外界传感器组4的检测范围外的区域。此外,行驶控制装置3可以根据周边障碍物Ob与车辆2的位置关系来算出被障碍物遮蔽的区域。因此,行驶控制装置3可以通过将这2个区域合在一起来算出死角区域Ba。
再者,以上说明过的实施方式为一例,本发明并不限于此。即,可以进行各种应用,任何实施方式都包含在本发明的范围内。例如,上述实施方式中是以规定形状来表现死角区域,但也可像图2所示那样以栅格状图的网格单位来加以表现,也能以多个网格的集合体来加以表现。
例如,上述实施方式中的记载设想的是在行驶控制装置3中以同一处理部及存储部来执行各处理,但也能以多个不同的处理部及存储部来执行。在该情况下,例如将具有同样构成的处理软件搭载于各存储部中,各处理部分担执行该处理。
此外,使用处理器和RAM、通过执行规定动作程序来实现了行驶控制装置3的各处理,但也可以视需要通过独立的硬件来实现。此外,上述实施方式中是将外界传感器组、车辆传感器组、执行器组、HMI装置组、外部通信装置记载为单独的装置,但也可以视需要组合任意2个以上来实现。
此外,附图中展示的是认为在说明实施方式时需要的控制线及信息线,并非一定展示了运用本发明的实际产品中包含的所有控制线及信息线。实际上,可认为几乎所有构成都相互连接在一起。
在上述各实施方式及变形例中,功能块的构成只是一例。也可一体地构成以各功能块的形式展示的若干功能构成,也可将以1个功能框图来表现的构成分割为2种以上的功能。此外,也可将各功能块所具有的功能的一部分设为其他功能块所具备的构成。
上述各实施方式及变形例也可各自组合。上文中对各种实施方式及变形例进行了说明,但本发明并不限定于这些内容。在本发明的技术思想的范围内思索的其他形态也包含在本发明的范围内。
下面的优先权基础申请的揭示内容以引用文的形式并入本文:
日本专利申请2019-98892(2019年5月27日申请)。
符号说明
1…车辆系统
2…车辆
3…行驶控制装置
4…外界传感器组
5…车辆传感器组
6…执行器组
7…HMI装置组
8…外部通信装置
10…处理部
11…信息获取部
12…周边障碍物确定部
13…死角区域确定部
14…风险判断部
14A…区域判断部
15…障碍物区域推断部
16…行驶控制计划部
17…行驶控制信息输出部
18…报知部
30…存储部
Ao…障碍物存在区域
Ba…死角区域
Db…危险死角区域
tDb…临时危险死角区域
Sb…安全死角区域
tSb…临时安全死角区域
Ob…周边障碍物
Un…不可测出化障碍物。
- 电子控制装置、车辆以及电子控制装置制造方法
- 用于容纳电气和/或电子部件的壳体、电子控制装置及制造该壳体和电子控制装置的方法