一种清扫机器人
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及机器人技术领域,尤其涉及一种清扫机器人。
背景技术
清扫机器人在工作时,先通过设置在底部前端的旋转扫把将垃圾扫到机器人底部中间的位置,然后位于机器人底部中间位置的抽吸结构就会将垃圾吸取到机器人的集尘盒中。
而集尘盒的空间有限,当集尘盒中的垃圾堆积满后,需要将清扫机器人停运,将集尘盒打开,取出集尘盒里的垃圾后才能够继续使用清扫机器人进行清扫,整个过程较为耗费时间,导致清扫机器人的实用性不高。
发明内容
本发明的目的在于提供一种清扫机器人,配备有专用的垃圾箱,垃圾箱中的垃圾堆积满后可直接对垃圾箱进行更换,以节约时间,从而提高清扫机器人的实用性。
为实现上述目的,本发明提供了一种清扫机器人,所述清扫机器人包括底座、风机、吸盘、垃圾箱、连接管和两个清扫臂,所述风机与所述底座固定连接,所述风机位于所述底座的上方,所述垃圾箱与所述底座拆卸连接,对所述垃圾箱与所述底座进行连接后,所述垃圾箱位于所述底座的上方,所述吸盘与所述底座固定连接,所述吸盘位于所述底座的下方,所述吸盘与所述风机的输入端相连通,所述连接管的一端与所述风机的输出端相连通,所述连接管的另一端与所述垃圾箱相连通,两个所述清扫臂分别与所述底座转动连接,两个所述清扫臂分别位于所述底座的两侧,所述底座两侧的所述清扫臂对垃圾进行清扫,垃圾随着所述清扫臂而逐渐移动至所述底座的所述吸盘处,所述风机运行产生吸力从而将垃圾从所述吸盘处吸入,并通过所述连接管将垃圾输送至所述垃圾箱的内部,当所述垃圾箱中的垃圾堆积满后,直接将所述垃圾箱从所述底座上拆卸下来更换上新的所述垃圾箱,使得本清扫机器人能够在短时间内继续工作,以节约时间,从而提高了清扫机器人的实用性。
其中,所述底座具有安装口,所述安装口的侧面设置有抵持结构,所述抵持结构包括第一压簧和抵持架,所述第一压簧的两端分别与所述底座和所述抵持架相抵持,所述抵持架与所述底座滑动连接,对所述垃圾箱与所述底座进行连接后,所述抵持架的侧面与所述垃圾箱的侧面相贴合,所述抵持结构能够将所述垃圾箱固定在所述安装口中,所述第一压簧在无外力作用的情况下对所述抵持架进行抵持,使得所述抵持架伸出所述底座而与所述垃圾箱的侧面相贴合,从而对所述垃圾箱进行抵挡,以防止所述垃圾箱左右晃动,从而将所述垃圾箱固定在所述安装口的内部,需要将所述垃圾箱从所述安装口的内部拆卸下来时,向所述底座的内部按压所述抵持架,使所述抵持架完全进入所述底座的内部,所述抵持架不再对所述垃圾箱进行抵挡,使得所述垃圾箱能够从所述安装口的内部滑出。
其中,所述底座设置有引导斜面,所述引导斜面与所述底座一体成型,所述引导斜面位于所述底座靠近所述安装口的侧面,所述引导斜面能够对所述垃圾箱进行引导,以方便所述垃圾箱的安装和拆卸,使得工作人员对所述垃圾箱的拆装更加方便。
其中,所述清扫臂包括转动臂、伸缩臂和伸缩弹簧,所述转动臂的一端与所述底座转动连接,所述伸缩臂与所述转动臂的另一端滑动连接,所述伸缩弹簧的两端分别与所述转动臂和所述伸缩臂固定连接,所述伸缩弹簧位于所述转动臂的内部,所述转动臂和所述伸缩臂的底部均设置有清扫结构,所述转动臂能够相对于所述底座进行转动,所述伸缩臂能够相对所述转动臂进行伸缩,所述伸缩弹簧对所述伸缩臂进行抵持,在无外力作用的情况下,所述伸缩臂受到所述伸缩弹簧的抵持而伸出所述转动臂,当所述伸缩臂碰到障碍物时,所述伸缩臂回缩至所述转动臂的内部,使得所述清扫臂能够正常运行,当所述伸缩臂离开障碍物时,所述伸缩臂在所述伸缩弹簧的作用下复位,使得所述转动臂和所述伸缩臂底部的所述清扫结构对垃圾进行清扫。
其中,所述底座的侧面设置有容纳槽,所述转动臂的上下两侧均设置有定位支架,所述容纳槽的上下两侧均设置有与所述定位支架相匹配的定位槽,所述定位支架位于所述定位槽的内部,所述定位支架能够在所述定位槽的内部进行转动,以实现所述转动臂与所述底座之间的转动连接,且所述定位支架和所述定位槽相互配合能够对所述转动臂的位置进行限制,使得所述转动臂能够更好地相对所述底座进行转动。
其中,所述转动臂的内部设置有固定结构,所述容纳槽的上方间隔设置有多个固定孔,所述固定结构包括第二压簧和活动柱,所述第二压簧的两端分别与所述转动臂和所述活动柱相抵持,所述第二压簧位于所述活动柱的下方,所述活动柱与所述转动臂滑动连接,所述活动柱的顶部位于其中一所述固定孔的内部,所述转动臂通过所述固定结构与所述底座进行固定,所述活动柱在自然状态下受到所述第二压簧的抵持,使得所述活动柱的顶部进入其中一个所述固定孔的内部,从而将所述转动臂与所述底座固定,需要调节所述转动臂的角度时,按压所述活动柱,使得所述活动柱完全进入所述转动臂中,便能够对所述转动臂的角度进行调节,调节完成后,所述活动柱在所述第二压簧的抵持下进入另一个所述固定孔的内部,以将所述转动臂与所述底座进行固定。
本发明的一种清扫机器人,清扫机器人工作时,所述底座两侧的所述清扫臂对垃圾进行清扫,垃圾随着所述清扫臂而逐渐移动至所述底座的所述吸盘处,所述风机运行产生吸力从而将垃圾从所述吸盘处吸入,并通过所述连接管将垃圾输送至所述垃圾箱的内部,当所述垃圾箱中的垃圾堆积满后,直接将所述垃圾箱从所述底座上拆卸下来更换上新的所述垃圾箱,使得本清扫机器人能够在短时间内继续工作,以节约时间,从而提高了清扫机器人的实用性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
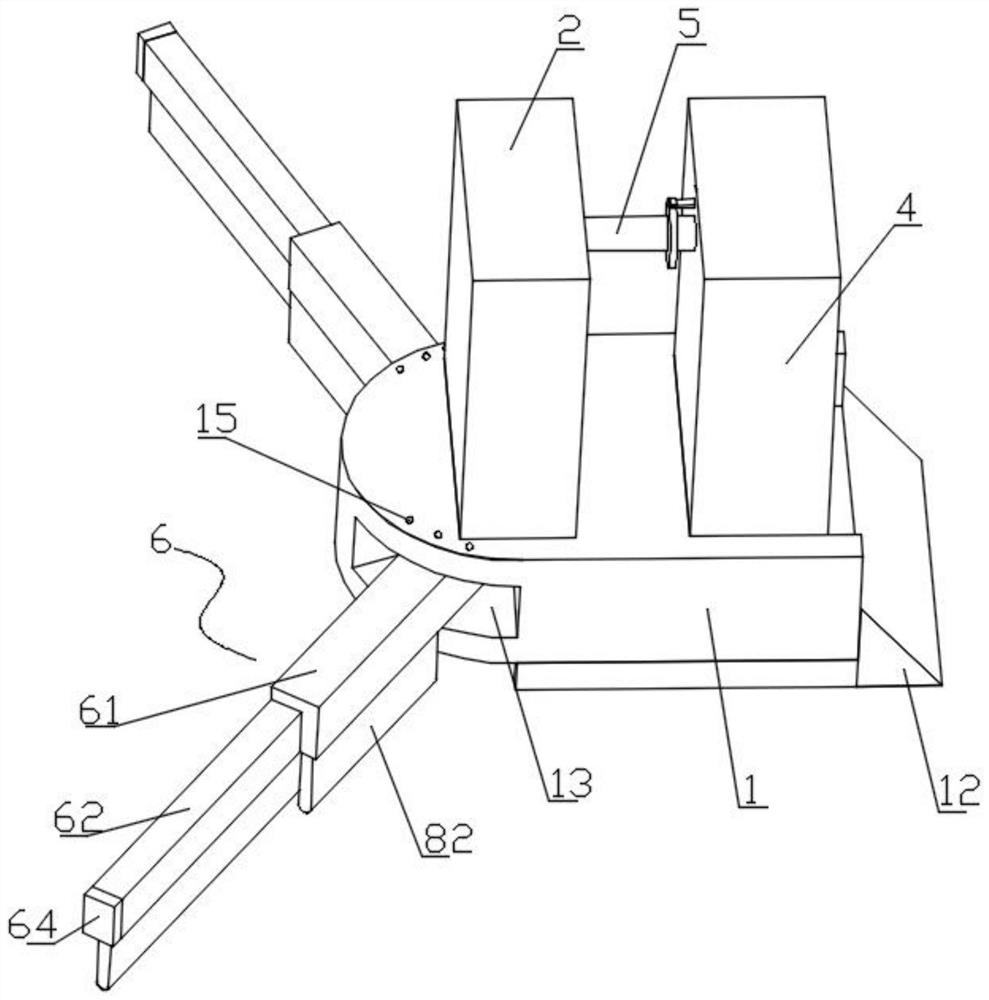
图1是本发明提供的一种清扫机器人的结构示意图。
图2是本发明提供的一种清扫机器人的俯视图。
图3是本发明提供的图2中A-A处的剖视图。
图4是本发明提供的图2中B-B处的剖视图。
图5是本发明提供的一种清扫机器人的底座位于清扫臂处的局部剖视图。
图6是本发明提供的图5中C-C处的剖视图。
1-底座、11-安装口、12-引导斜面、13-容纳槽、14-定位槽、15-固定孔、2-风机、3-吸盘、4-垃圾箱、41-卡合凹槽、5-连接管、51-卡合支架、6-清扫臂、61-转动臂、611-定位支架、612-安装槽、62-伸缩臂、63-伸缩弹簧、64-防护片、7-抵持结构、71-第一压簧、72-抵持架、8-清扫结构、81-第三压簧、82-清扫片、9-固定结构、91-第二压簧、92-活动柱。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
请参阅图1至图6,本发明提供一种清扫机器人,所述清扫机器人包括底座1、风机2、吸盘3、垃圾箱4、连接管5和两个清扫臂6,所述风机2与所述底座1固定连接,所述风机2位于所述底座1的上方,所述垃圾箱4与所述底座1拆卸连接,对所述垃圾箱4与所述底座1进行连接后,所述垃圾箱4位于所述底座1的上方,所述吸盘3与所述底座1固定连接,所述吸盘3位于所述底座1的下方,所述吸盘3与所述风机2的输入端相连通,所述连接管5的一端与所述风机2的输出端相连通,所述连接管5的另一端与所述垃圾箱4相连通,两个所述清扫臂6分别与所述底座1转动连接,两个所述清扫臂6分别位于所述底座1的两侧。
在本实施方式中,所述底座1的内部设置有驱动系统,以带动所述底座1进行移动,所述风机2固定设置在所述底座1的上方,所述垃圾箱4可拆卸的固定在所述底座1的上方,所述吸盘3设置在所述底座1的下方,所述吸盘3与所述风机2的输入端相连通,所述垃圾箱4与所述风机2的输出端通过所述连接管5相连通,所述连接管5与所述垃圾箱4的连接处可进行拆卸,两个所述清扫臂6分别活动设置在所述底座1的两侧,本清扫机器人工作时,所述底座1两侧的所述清扫臂6对垃圾进行清扫,垃圾随着所述清扫臂6而逐渐移动至所述底座1的所述吸盘3处,所述风机2运行产生吸力从而将垃圾从所述吸盘3处吸入,并通过所述连接管5将垃圾输送至所述垃圾箱4的内部,当所述垃圾箱4中的垃圾堆积满后,直接将所述垃圾箱4从所述底座1上拆卸下来更换上新的所述垃圾箱4,使得本清扫机器人能够在短时间内继续工作,以节约时间,从而提高了清扫机器人的实用性。
进一步的,所述底座1具有安装口11,所述安装口11的侧面设置有抵持结构7,所述抵持结构7包括第一压簧71和抵持架72,所述第一压簧71的两端分别与所述底座1和所述抵持架72相抵持,所述抵持架72与所述底座1滑动连接,对所述垃圾箱4与所述底座1进行连接后,所述抵持架72的侧面与所述垃圾箱4的侧面相贴合。
在本实施方式中,所述底座1设置有所述安装口11,将所述垃圾箱4与所述底座1进行连接后,所述垃圾箱4的底部位于所述安装口11的内部,以对所述垃圾箱4进行定位,从而方便所述垃圾箱4的安装,所述抵持结构7能够将所述垃圾箱4固定在所述安装口11中,所述第一压簧71在无外力作用的情况下对所述抵持架72进行抵持,使得所述抵持架72伸出所述底座1而与所述垃圾箱4的侧面相贴合,从而对所述垃圾箱4进行抵挡,以防止所述垃圾箱4左右晃动,从而将所述垃圾箱4固定在所述安装口11的内部,需要将所述垃圾箱4从所述安装口11的内部拆卸下来时,向所述底座1的内部按压所述抵持架72,使所述抵持架72完全进入所述底座1的内部,所述抵持架72不再对所述垃圾箱4进行抵挡,使得所述垃圾箱4能够从所述安装口11的内部滑出。
进一步的,所述底座1设置有引导斜面12,所述引导斜面12与所述底座1一体成型,所述引导斜面12位于所述底座1靠近所述安装口11的侧面。
在本实施方式中,所述引导斜面12能够对所述垃圾箱4进行引导,以方便所述垃圾箱4的安装和拆卸,使得工作人员对所述垃圾箱4的拆装更加方便。
进一步的,所述清扫臂6包括转动臂61、伸缩臂62和伸缩弹簧63,所述转动臂61的一端与所述底座1转动连接,所述伸缩臂62与所述转动臂61的另一端滑动连接,所述伸缩弹簧63的两端分别与所述转动臂61和所述伸缩臂62固定连接,所述伸缩弹簧63位于所述转动臂61的内部,所述转动臂61和所述伸缩臂62的底部均设置有清扫结构8;
所述底座1的侧面设置有容纳槽13,所述转动臂61的上下两侧均设置有定位支架611,所述容纳槽13的上下两侧均设置有与所述定位支架611相匹配的定位槽14,所述定位支架611位于所述定位槽14的内部;
所述转动臂61的内部设置有固定结构9,所述容纳槽13的上方间隔设置有多个固定孔15,所述固定结构9包括第二压簧91和活动柱92,所述第二压簧91的两端分别与所述转动臂61和所述活动柱92相抵持,所述第二压簧91位于所述活动柱92的下方,所述活动柱92与所述转动臂61滑动连接,所述活动柱92的顶部位于其中一所述固定孔15的内部。
在本实施方式中,所述转动臂61能够相对于所述底座1进行转动,所述伸缩臂62能够相对所述转动臂61进行伸缩,所述伸缩弹簧63对所述伸缩臂62进行抵持,在无外力作用的情况下,所述伸缩臂62受到所述伸缩弹簧63的抵持而伸出所述转动臂61,当所述伸缩臂62碰到障碍物时,所述伸缩臂62回缩至所述转动臂61的内部,使得所述清扫臂6能够正常运行,当所述伸缩臂62离开障碍物时,所述伸缩臂62在所述伸缩弹簧63的作用下复位,使得所述转动臂61和所述伸缩臂62底部的所述清扫结构8对垃圾进行清扫,所述转动臂61的上下两侧设置有所述定位支架611,所述定位支架611能够在所述定位槽14的内部进行转动,以实现所述转动臂61与所述底座1之间的转动连接,且所述定位支架611和所述定位槽14相互配合能够对所述转动臂61的位置进行限制,使得所述转动臂61能够更好地相对所述底座1进行转动,所述转动臂61通过所述固定结构9与所述底座1进行固定,所述活动柱92在自然状态下受到所述第二压簧91的抵持,使得所述活动柱92的顶部进入其中一个所述固定孔15的内部,从而将所述转动臂61与所述底座1固定,需要调节所述转动臂61的角度时,按压所述活动柱92,使得所述活动柱92完全进入所述转动臂61中,便能够对所述转动臂61的角度进行调节,调节完成后,所述活动柱92在所述第二压簧91的抵持下进入另一个所述固定孔15的内部,以将所述转动臂61与所述底座1进行固定。
进一步的,所述清扫结构8包括第三压簧81和清扫片82,所述转动臂61和所述伸缩臂62的底部均设置有安装槽612,所述第三压簧81的顶部与所述安装槽612的顶部相固定,所述第三压簧81的底部与所述清扫片82相固定,所述清扫片82的顶部位于所述安装槽612中。
在本实施方式中,所述清扫片82设置在所述第三压簧81的底部,所述第三压簧81对所述清扫片82进行抵持,使得所述清扫片82始终与地面接触,从而提高对地面的清洁效果。
进一步的,所述清扫臂6还包括防护片64,所述防护片64与所述伸缩臂62固定连接,所述防护片64位于所述伸缩臂62远离所述转动臂61的一端。
在本实施方式中,所述防护片64固定设置在所述伸缩臂62远离所述转动臂61的一端,所述防护片64对所述伸缩臂62进行防护,防止所述伸缩臂62与障碍物直接接触而损坏。
进一步的,所述连接管5的外侧设置有卡合支架51,所述垃圾箱4的外侧设置有与所述卡合支架51相匹配的卡合凹槽41。
在本实施方式中,所述连接管5的外侧设置有所述卡合支架51,所述垃圾箱4的外侧设置有与所述卡合支架51相匹配的卡合凹槽41,将所述垃圾箱4安装在所述底座1上后,可将所述卡合支架51卡合进入所述卡槽凹槽中,从而将所述连接管5的一端固定在所述垃圾箱4上,以防止所述连接管5从所述垃圾箱4上掉落。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
- 一种光伏板清扫机器人的动力装置及光伏板清扫机器人
- 一种用于对接清扫机器人的对接站及清扫机器人