单轴光纤陀螺仪设置在Z轴的组合导航定位系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及组合导航技术领域,具体涉及单轴光纤陀螺仪设置在Z轴的组合导航定位系统。
背景技术
惯性测量单元(Inertial measurement unit,简称IMU) 是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。
近年来,全球卫星导航系统(GNSS)和惯性导航系统(INS)发展迅速,应用领域越来越广泛。GNSS 和 INS 两种系统在导航定位方面具有各自的优缺点,GNSS/INS 紧组合导航定位系统充分发挥两者的优势,提高了系统的整体导航精度和性能,实现单导航系统无法比拟的导航优势,在实时导航、车载定位、移动导航等都领域得到广泛的发展和应用。
中国发明专利CN104596513B提供了一种光纤陀螺与微机械陀螺组合的惯导系统及导航方法,所述系统包括光纤陀螺仪和垂直方向的三轴MEMS陀螺仪,所述光纤陀螺仪与所述MEMS陀螺仪互为冗余设置;常态时,所述光纤陀螺仪测量方位轴向的角速度,当所述光纤陀螺仪出现故障时,自动切换到所述MEMS陀螺仪。该惯导系统采用一个光纤陀螺仪和三轴MEMS陀螺仪作为惯导三个轴向的角速度传感器,光纤陀螺仪与垂直方向的MEMS陀螺仪形成互为冗余的设计方案。常态时,光纤陀螺仪取代垂直方向的MEMS陀螺仪测量方位轴向的角速度。当光线陀螺仪损坏时,可以自动切换到垂直方向MEMS陀螺仪,使系统在相当一段时间内继续保持工作。该惯导系统中互为冗余设置的光纤陀螺仪和MEMS陀螺仪未实现一体化封装。
发明内容
本发明的目的是提供一种单轴光纤陀螺仪设置在Z轴的组合导航定位系统,在结合光纤陀螺仪和MEMS陀螺仪优点的基础上,对惯导系统使用的单轴光纤陀螺仪和MEMS惯性测量单元实现了一体化封装。
为实现上述目的,本发明采用的技术方案是:
单轴光纤陀螺仪设置在Z轴的组合导航定位系统,包括惯性测量装置、GNSS接收机、里程计数据、通信接口、数据采集与导航解算模块以及电源电路;
所述惯性测量装置包括单轴光纤陀螺仪和MEMS惯性测量单元,所述MEMS惯性测量单元包括三轴MEMS陀螺仪和三轴MEMS加速度计;所述MEMS惯性测量单元和单轴光纤陀螺仪呈上下布置后一体化封装;所述单轴光纤陀螺仪用于测量Z轴的角速率,所述三轴MEMS陀螺仪用于测量X轴和Y轴的角速率,所述三轴MEMS加速度计用于测量三个正交轴上的加速度;
所述GNSS接收机包括双天线、射频前端处理模块、RTK定位及双天线定向解算模组,所述通信接口包括串行接口和对外接口,所述数据采集与导航解算模块包括FPGA和微处理器;
所述惯性测量装置、GNSS接收机都通过串行接口与FPGA连接,所述里程计数据通过GPIO与FPGA连接;所述FPGA通过EMIF或FMC连接微处理器,所述微处理器有嵌入捷联惯导算法和基于卡尔曼滤波的INS/GNSS/里程计数据组合导航算法,所述对外接口连接FPGA和/或微处理器;
所述电源电路为惯性测量装置、GNSS接收机、通信接口以及数据采集与导航解算模块供电。
进一步的,还包括温度气压一体传感器,所述温度气压一体传感器通过IIC总线与微处理器连接。
进一步的,所述单轴光纤陀螺仪自带温度传感器。
进一步的,所述微处理器有写入光纤陀螺仪的温度补偿模型。
进一步的,所述微处理器还有写入MEMS陀螺仪的漂移补偿模型。
进一步的,所述串行接口包括RS422接口、SPI接口、RS232接口、UART接口中的一种或几种。
进一步的,所述对外接口包括RS232接口、RS422接口、CAN接口、USB/SD卡、以太网接口中的一种或几种。
进一步的,所述电源电路包括打开或关闭电源的控制电路、滤波电路和DC/DC转换电路;所述DC/DC转换电路包括第一转换电路、第二转换电路和第三转换电路,所述第一转换电路将12VDC转换为5VDC为单轴光纤陀螺仪、串行接口供电;所述第二转换电路将5VDC转换为3.3VDC为MEMS惯性测量单元以及数据采集与导航解算模块供电;第三转换电路将3.3VDC转换为1.8VDC为USB/SD卡、以太网接口供电。
进一步的,还包括能围成封闭容纳腔的可拆卸壳体,所述壳体的材质为铝合金或镁铝合金或铜合金。
与现有技术相比,本发明具有如下有益效果:
1、惯性测量装置结合了光纤陀螺仪精度高、可靠性好的优势以及MEMS陀螺仪成本低、体积小的优点。
2、在保证高精度测量运动载体Z轴角速率的前提下,对惯导系统使用的单轴光纤陀螺仪和MEMS惯性测量单元实现了一体化封装。
3、单轴光纤陀螺仪通过自带的温度传感器,以及写入微处理器的光纤陀螺仪的温度补偿模型,能够有效抑制温度变化引起的零偏漂移,提高了光纤陀螺仪的测量精度。
4、MEMS陀螺仪通过温度气压一体传感器,以及写入微处理器的MEMS陀螺仪漂移补偿模型,明显提高了MEMS陀螺仪的精度水平。
5、本发明将惯性测量装置、GNSS接收机、里程计数据、通信接口、数据采集与导航解算模块以及电源电路组成高性能的组合导航定位系统,能够满足自动驾驶汽车、移动机器人、工程机械、精准农业、轨道交通等领域高精度定位的需求。
附图说明
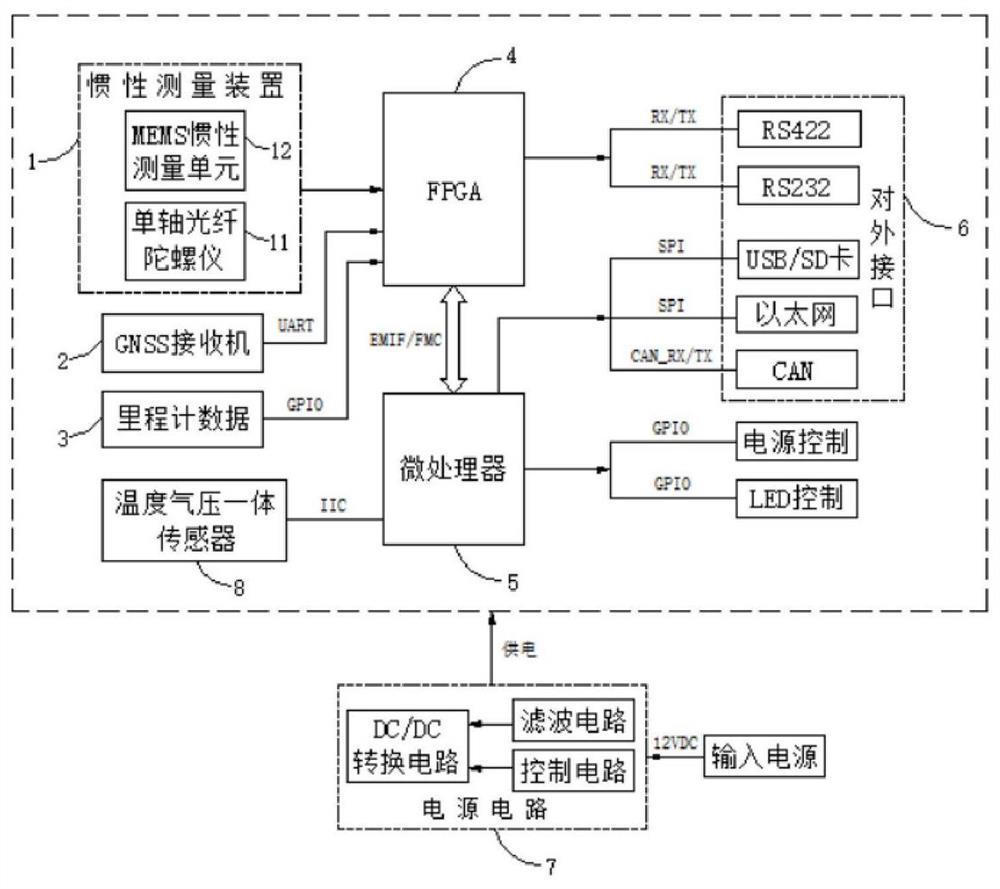
图1是本发明的单轴光纤陀螺仪设置在Z轴的组合导航定位系统的工作原理框图。
图2是本发明的单轴光纤陀螺仪设置在Z轴的组合导航定位系统的产品外观示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
请参照图1所示,本发明提出一种单轴光纤陀螺仪设置在Z轴的组合导航定位系统,包括惯性测量装置1、GNSS接收机2、里程计数据3、通信接口、数据采集与导航解算模块以及电源电路7。
所述惯性测量装置1包括单轴光纤陀螺仪11和MEMS惯性测量单元12。所述MEMS惯性测量单元12包括三轴MEMS陀螺仪和三轴MEMS加速度计,所述MEMS惯性测量单元12和单轴光纤陀螺仪11呈上下布置后一体化封装,惯性测量装置1的整体形状呈圆柱状。所述单轴光纤陀螺仪11用于测量Z轴的角速率,所述三轴MEMS陀螺仪用于测量X轴和Y轴的角速率,所述三轴MEMS加速度计用于测量三个正交轴上的加速度。本实施例中,载体坐标系以载体的质心为坐标原点,以载体前进方向为X轴,水平向右为Y轴,Z轴沿载体垂直向上,三轴构成右手直角坐标系。
所述单轴光纤陀螺仪11为数字闭环单轴光纤陀螺仪,其采用数字相位阶梯波实现闭环,采用方波信号进行偏置调制,获得数字角速度值后转换为低采样率的数字量向外输出。单轴光纤陀螺仪11自带温度传感器。单轴光纤陀螺仪11的量程为±450º/S,零偏稳定性(1σ)≤0.3º/h,带宽为200Hz。
所述三轴MEMS陀螺仪利用作用在旋转物体上的科里奥利力,通过采用具有高Q值和相对灵敏度的压电单晶作为振动体,以较小的尺寸实现了振动型中最高的输入/输出灵敏度比。
所述GNSS接收机2包括双天线、射频前端处理模块、RTK定位及双天线定向解算模组。所述双天线包括主天线和从天线,所述RTK定位及双天线定向解算模组集成了基带数字信号处理模块和定位导航解算模块。所述GNSS接收机2设置在GNSS板卡上,GNSS接收机2通过对卫星载波信号的接收、处理、解算,从而实现定位、导航和授时的功能。GNSS接收机2能够兼容中国北斗卫星导航系统、美国GPS、欧盟GALILEO和俄罗斯GLONASS。
所述通信接口包括串行接口和对外接口6。所述串行接口包括RS422接口、SPI接口、RS232接口、UART接口中的一种或几种。
所述数据采集与导航解算模块包括FPGA4和微处理器5。所述FPGA4通过EMIF或FMC连接微处理器5,所述微处理器5为ARM处理器或DSP微处理器,微处理器5有嵌入捷联惯导算法和基于卡尔曼滤波的INS/GNSS/里程计数据组合导航算法。所述FPGA4有接入秒脉冲(PPS)同步信号。
所述惯性测量装置1、GNSS接收机2都通过串行接口与FPGA4连接;具体的,所述GNSS接收机2用UART接口与FPGA4连接。所述里程计数据3通过GPIO与FPGA4连接。
所述对外接口6连接FPGA4和/或微处理器5,对外接口6包括RS232接口、RS422接口、CAN接口、USB/SD卡、以太网接口中的一种或几种。微处理器5将解算后的横滚角、俯仰角、航向角数据以及经过融合的速度、位置等导航信息,通过对外接口6输出至上位机。
本实施例中,微处理器5有写入光纤陀螺仪的温度补偿模型。温度补偿模型采用多项式模型,在实际运用中还可以采用线性模型、小波神经网络模型等其他温度补偿模型,此处不作限定。单轴光纤陀螺仪设置在Z轴的组合导航定位系统的工作温度为-40℃-+85℃。微处理器5还有写入MEMS陀螺仪的漂移补偿模型用于消除漂移误差,提高了MEMS陀螺仪的测量精度水平。
本发明提出的单轴光纤陀螺仪设置在Z轴的组合导航定位系统,还包括温度气压一体传感器8,所述温度气压一体传感器8通过IIC总线与微处理器5连接。
所述电源电路7包括打开或关闭电源的控制电路、滤波电路和DC/DC转换电路,电源电路7为惯性测量装置1、GNSS接收机2、通信接口以及数据采集与导航解算模块供电。单轴光纤陀螺仪设置在X轴的组合导航定位系统的输入电压范围是9-36VDC,额定电压是12VDC。所述DC/DC转换电路包括第一转换电路、第二转换电路和第三转换电路。所述第一转换电路将12VDC转换为5VDC为单轴光纤陀螺仪11、串行接口供电;所述第二转换电路将5VDC转换为3.3VDC为MEMS惯性测量单元12以及数据采集与导航解算模块供电;第三转换电路将3.3VDC转换为1.8VDC为USB/SD卡、以太网接口供电。所述单轴光纤陀螺仪设置在Z轴的组合导航定位系统还设有LED状态指示灯,所述微处理器5通过GPIO自动控制电源、LED状态指示灯的打开或关闭。
请参照图2所示,本发明提供的单轴光纤陀螺仪设置在Z轴的组合导航定位系统,在装配成产品时还包括能围成封闭容纳腔的可拆卸壳体,所述壳体包括底座9和盒体10,底座9上设置有安装支架。所述单轴光纤陀螺仪11固定在底座上,所述GNSS接收机2与GNSS板卡连接;所述里程计数据3、通信接口、数据采集与导航解算模块以及电源电路7都设置在电路板上。所述底座9和盒体10的内部设有安装固定单轴光纤陀螺仪11、电路板的安装柱,安装柱的一端设有内螺纹。所述壳体的侧面设有适配对外接口6的开口。所述底座9设有螺孔,盒体10设有内螺纹,底座9和盒体10装配后用螺丝固定。优选的,底座9和盒体10的材质为铝合金,在实际运用中还可以采用镁铝合金或铜合金。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于双轴光纤旋转调制组合导航系统的自主标定方法
- 单轴光纤陀螺仪设置在Y轴的组合导航定位系统
- 单轴光纤陀螺仪设置在X轴的组合导航定位系统