一种混凝土界面监测装置及监测方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及混凝土灌注桩施工技术领域,特别涉及一种混凝土界面监测装置及监测方法。
背景技术
钻孔灌注桩是一种就位成孔,指在工程现场通过机械钻孔、钢管挤土或人力挖掘等手段在地基土中形成桩孔,并在其内放置钢筋笼、灌注混凝土而做成的桩,与沉入桩中的锤击法相比,钻孔灌注桩施工噪声和震动要小的多,能建造比预制桩的直径大的多的桩,在各种地基上均可使用。施工质量的好坏对桩的承载力影响很大,钻孔灌注桩混凝土灌注是水下混凝土灌注,混凝土灌注的密实是利用混凝土的大坍落度使其密实,要求水下灌注混凝土必须具备良好的和易性,坍落度大等特点,钻孔灌注桩由于其施工工艺成熟、承载力高、适用范围广已被广泛应用于公路、铁路桥梁等结构工程基础中。高等级公路大、中、小桥和互通式立交桥,基本采用钻孔灌注桩。
目前,在施工过程中通常采用重锤法进行估测,会因为测量人员的工程经验的差异等因素,具有很大的主观性,导致测量结果不够科学,同时对于目前一些超大工程,水下灌注桩高度能达到上百米,此时情况复杂,依靠人工经验的准确性极差,因为操作者的经验不同,不能得出统一的结果,不仅不能准确判断出混凝土面,而且费时、费力,劳动强度大。此外,再加上混凝土与泥浆之间浮浆层的存在,使得测量结果误差很大。实际施工过程中,混凝土超灌现象普遍存在,已成为钻孔灌注桩过程控制的通病,特别是桩顶空头达3、4m时,成桩开挖后,桩顶露出基底标高就像树林一样,极其难看。基坑开挖后凿除的超灌混凝土要运至郊外填,又将占用土,破坏环境,既浪费了混凝土,这又加大了破桩的人工成本,增添了不必要的成本支出。国内外的研究中,对于如何准确监测水下混凝土界面的方法上基础建设方面的相关部门还没有一个套科学有效地方法及装置,市面上目前出现的监测装置,主要是依靠传感器定点布控,对于一些超深灌注桩,传感器的前期安置与回收工作量很大,而且布控的密度很难把握,无法监测到界面的实时准确位置,实现界面的实时的跟踪监测。
因此,需要一种能够准确确定混凝土界面位置的监测装置。
发明内容
本发明提供一种混凝土界面监测装置及监测方法,可以解决现有技术中通过人工测锤监测一级传感器监测导致的混凝土界面位置监测不准确的问题。
本发明提供了一种混凝土界面监测装置,包括:
浮球,其密度小于混凝土密度且大于泥浆的密度,浮球通过连接绳连接有收放机构,以改变连接绳的收放长度;
调控机构,与收放机构连接,以使连接绳的拉力值在阈值范围内,阈值范围为当浮球处于混凝土和泥浆的交界面上时连接绳的拉力范围值。
可选的,收放机构包括:
卷线器,连接绳缠绕于卷线器的外周。
可选的,收放机构还包括:
驱动件,与卷线器连接,以使卷线器绕其中心轴正转或反转。
可选的,驱动件为步进电机,卷线器的轴心通过一连接轴与步进电机的输出轴固定连接。
可选的,调控机构包括:
传感器,与连接绳连接,用于监测连接绳的拉力值;
处理器,与传感器及步进电机分别信号连接,用于通过拉力值控制步进电机的转向及转动圈数。
可选的,传感器为扭矩传感器,扭矩传感器连接于步进电机的输出轴和连接轴之间,扭矩传感器通过监测连接轴的扭矩进而间接监测连接绳的拉力值。
可选的,步进电机还分别与第一按钮开关和第二按钮开关连接,第一按钮开关用于控制步进电机的正转,第二按钮开关用于控制步进电机的反转。
可选的,处理器还用于通过步进电机的转动圈数计算连接绳的长度变化值,处理器还与显示屏连接,以将连接绳的长度变化值实时显示在显示屏上。
可选的,混凝土界面监测装置还包括:
报警器,与处理器信号连接,用于当长度变化值达到预设值时发出报警。
本发明还提供了一种混凝土界面的监测方法,应用于混凝土界面监测装置,混凝土界面监测装置包括浮球和调控机构,浮球小于混凝土密度且大于泥浆的密度,浮球通过连接绳与收放机构连接,以改变连接绳的收放长度,调控机构与收放机构连接,以使连接绳的拉力值在阈值范围内,阈值范围为当浮球处于混凝土和泥浆的交界面上时连接绳的拉力范围值,监测方法包括:
S1:将连接有连接绳的浮球置于混凝土和泥浆的交界面上;
S2:随着混凝土和泥浆的交界面的上升,调控机构控制收放机构的收放状态以使连接绳的拉力值在阈值范围内。
与现有技术相比,本发明的有益效果在于:
1、本发明提供的一种混凝土界面监测装置,通过设置的调控机构来控制收放机构的收放状态从而实时调整连接绳的拉力值使其处于阈值范围内,从而保证了连接绳的受力处于拉力和张力的临界值,浮球的位置处于理想的混凝土-泥浆界面,随着混凝土灌注界面上升速度的变化,能够通过浮球上端所系连接绳的拉力和张力敏感的捕捉到浮球的位置变化,进而通过调控机构实时调整。通过连接绳反映浮球的位置,直接反映出混凝土界面的实时位置,整个过程处于动态监测的系统中,能够始终精确地定位混凝土界面,使得工程质量的掌控更加客观化,可视化,有效的监测和控制混凝土在水下的灌注位置,避免造成混凝土资源的浪费,降低了项目施工成本和项目建设成本,解决了因为超灌造成的多余混凝土弃块的环境污染问题。
2、本发明提供的一种混凝土界面监测装置,体积较小,方便转场携带,在监测过程中不影响整体的施工过程;同时装置控制过程简单、方便,现场学习,快速上手,而且不需要施工人员过多操控,极大的提高了装置的应用范围。
附图说明
图1为本发明实施例提供的一种混凝土界面监测装置的主要结构示意图;
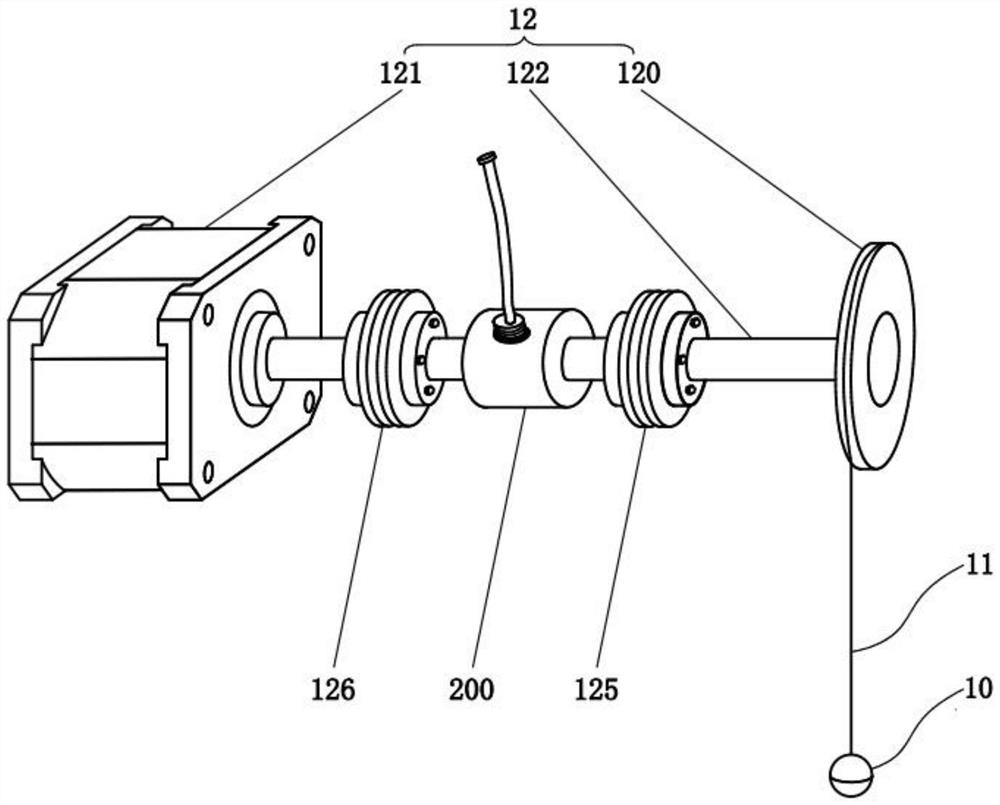
图2为本发明实施例提供的一种混凝土界面监测装置的部分结构示意图;
图3为本发明实施例提供的一种混凝土界面监测装置的整体结构示意图;
图4为本发明实施例中混凝土界面的上升速度大于浮球的上升速度时的状态图;
图5为本发明实施例中混凝土界面的上升速度小于浮球的上升速度时的状态图;
图6为本发明实施例提供的一种混凝土界面监测装置的使用状态图。
附图标记说明:
10-浮球,11-连接绳,12-收放机构,120-卷线器,121-驱动件,122-连接轴,123-第一按钮开关,124-第二按钮开关,125-第一联轴器,126-第二联轴器,200-传感器,201-处理器,30-报警器,31-显示屏,32-保护壳,33-船形开关,34-圆形通孔,35-座板,36-电源线,40-混凝土,41-泥浆,42-钢筋笼,43-钢护筒,44-漏斗导管。
具体实施方式
下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明的技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
目前,在施工过程中通常采用重锤法进行估测,会因为测量人员的工程经验的差异等因素,具有很大的主观性,导致测量结果不够科学,同时对于目前一些超大工程,水下灌注桩高度能达到上百米,此时情况复杂,依靠人工经验的准确性极差。国内外的研究中,对于如何准确监测水下混凝土界面的方法上基础建设方面的相关部门还没有一个套科学有效地方法,市面山目前出现的监测装置,主要是依靠传感器定点布控,对于一些超深灌注桩,传感器的前期安置与回收工作量很大,而且布控的密度很难把握,无法监测到界面的实时准确位置,从而无法实现界面的实时的跟踪监测。
如图1所示,本发明实施例提供的一种混凝土界面监测装置,包括:浮球10和调控机构,浮球10的密度小于混凝土密度且大于泥浆的密度,浮球10通过连接绳11连接有收放机构12,以改变连接绳11的收放长度,调控机构与收放机构12连接,以使连接绳11的拉力值在阈值范围内,阈值范围为当浮球10处于混凝土40和泥浆41的交界面上时连接绳11的拉力范围值,在本实施例中,浮球10可以选用光敏树脂制成,通过在其内部添加一些铁块或者钢珠,增加浮球10的质量,以此调节浮球10的平均密度使其密度小于混凝土密度且大于泥浆的密度,浮球10呈球形且表面光滑,球体半径不超过八厘米,整体质量保持在一千克以内,可以使得浮球10在混凝土灌注过程中始终位于混凝土40界面的上部,且在泥浆41浮浆层的底部,随着混凝土的不断灌注,确保浮球10的位置能够始终位于这个交界面,连接绳11的变化可以通过肉眼观察如给连接绳11上标注刻度,也可通过其他方式自动计算连接绳11的长度变化,本发明不限于具体的哪种方式。
本发明提供的一种混凝土界面监测装置,通过设置的调控机构来控制收放机构的收放状态从而实时调整连接绳的拉力值使其处于阈值范围内,从而保证了连接绳的受力处于拉力和张力的临界值,浮球的位置处于理想的混凝土-泥浆界面,随着混凝土灌注界面上升速度的变化,能够通过浮球上端所系连接绳的拉力和张力敏感的捕捉到浮球的位置变化,进而通过调控机构实时调整。通过连接绳反映浮球的位置,直接反映出混凝土界面的实时位置,整个过程处于动态监测的系统中,能够始终精确地定位混凝土界面,使得工程质量的掌控更加客观化,可视化,有效的监测和控制混凝土在水下的灌注位置,避免造成混凝土资源的浪费,降低了项目施工成本和项目建设成本,解决了因为超灌造成的多余混凝土弃块的环境污染问题。
具体的,收放机构12包括卷线器120和驱动件121,连接绳11缠绕于卷线器120的外周,驱动件121与卷线器120连接,以使卷线器120绕其中心轴正转或反转。
在本实施例中,驱动件121为步进电机,卷线器120的轴心通过一连接轴122与步进电机的输出轴固定连接,这样便可调整输出轴的转速,使其以肉眼便于观察的速度转动,从而更好的监控连接绳的变化长度,连接轴122和卷线器120均采用轻质塑料制成,目的是为了减小转动惯量,降低能耗,同时提高系统的精度。
如图2所示,调控机构包括:传感器200和处理器201,传感器200与连接绳11连接,用于监测连接绳11的拉力值,处理器201与传感器200及步进电机分别信号连接,用于通过拉力值控制步进电机的转向及转动圈数。
传感器200将监测到的连接绳11的拉力值实时反馈给处理器201,处理器201通过将其与阈值范围进行比较,若大于阈值范围则控制步进电机转动使卷线器120转动放长连接绳11,直至当其拉力值处于阈值范围内,当拉力值小于阈值范围则控制步进电机反向转动使卷线器120反向转动缩短连接绳11,直至当其拉力值处于阈值范围内,从而实现了混凝土界面上升过程中浮球10的动态调整过程,使其始终位于混凝土40和泥浆41的交界面上,本实施例中,处理器201属于PCB印刷电路板,处理器201以32单片机为主控芯片,PCB电路版整体采用贴片式封装,集成有控制电路、信号处理电路和驱动电路等,可通过程序驱动相应的外设进行工作。
可选的,传感器200为扭矩传感器,扭矩传感器连接于步进电机的输出轴和连接轴122之间,扭矩传感器通过监测连接轴122的扭矩进而间接监测连接绳11的拉力值,具体的,扭矩传感器的输入轴通过第一联轴器125与连接轴122轴连接,扭矩传感器的输出轴通过第二联轴器126与步进电机的输出轴轴连接,进而监测连接轴122上的扭矩,间接得到连接绳11的拉力值,卷线器120与步进电机通过连接轴122带动下保持相同的角速度旋转,在传动环节通过第一联轴器125和第二联轴器126连接,使得动力的传递更加稳定,收线过程更加稳定。
可选的,步进电机还分别与第一按钮开关123和第二按钮开关124连接,第一按钮开关123用于控制步进电机的正转,第二按钮开关124用于控制步进电机的反转,第一按钮开关123和第二按钮开关124的作用主要体现在意外情况,即便是意外情况下无法实现处理器201的自动控制,也可通过操作第一按钮开关123和第二按钮开关124手动实现步进电机的正转和反转以及转动时间。
可选的,处理器201还用于通过步进电机的转动圈数计算连接绳11的长度变化值,处理器201还与显示屏31连接,以将连接绳11的长度变化值实时显示在显示屏31上,在本实施例中连接绳11上还有标有刻度。
在开始情况下,通过手动操作第一按钮开关123或第二按钮开关124控制步进电机转动使卷线器120转动使连接绳11伸长从而使浮球10下落,待浮球10到达混凝土界面处时,关闭步进电机处理器记录此时步进电机转过的圈数,可推算出混凝土灌注桩灌注面距离设计标高的距离,灌注过程中,步进电机转动带动连接绳11回收,动态记录步进电机转动的圈数,换算成上升的距离,并与设计标高作差,此差值通过显示屏31实时显示,即可得到实时位置界面距离标高的差值,设置的连接绳11采用软质细绳,使得自身的重量较轻,自身产生的扭矩分量对真个系统的影响会有所减小,同时等间距的设置刻度,方便读出连接绳11显示的实际距离并与显示屏2显示的测量距离作比较,保证实际的测量精度。
可选的,混凝土界面监测装置还包括报警器30,报警器30与处理器201信号连接,用于当长度变化值达到预设值时发出报警,设置的报警器30能够在混凝土界面到达一定高度的时候发出警报音,提醒施工人员及时掌握施工进度,此一定高度指的是混凝土实时位置界面距离标高的差值接近零时的一个具体数值范围,如8-10公分,设置报警时间为30S。
本发明提供的一种混凝土界面监测装置,通过设置的处理器,能够对施工过程的动态变化进行综合研判,并根据结果将其输出至显示屏上,实时反映出混凝土界面的高度,以及或根据设置的灌注阈值,驱动报警器发出警报,提示施工人员停止混凝土的灌注,保证施工人员能够时刻掌握灌注情况,精准的做出下一步反映,提高监测效率。
具体的,在本实施例中,参考图3,设置保护壳32,将装置的驱动设备整体包裹在内部,与外部隔绝,防止施工现场的泥浆、尘土等恶劣条件对装置造成影响,保护壳32的前侧设显示屏31,船型开关33设置为设备的总电源,用于控制装置的启动与停止,船形开关33在远离显示屏31的一侧固定安装第一按钮开关123和第而按钮开关124,保护壳32外壁一侧开设有圆形通孔34,保护壳32的底面固定安装有座板35,座板35用于固定步进电机,防止其在转动过程由于机械振动出现移位等意外情况,影响监测效果,保护壳32的一侧有引出有电源线36,保护壳32在远离圆形通孔34的一侧内壁固定设置有报警器30,报警器30的一侧设置有处理器201。
本发明还提供了一种混凝土界面的监测方法,应用于混凝土界面监测装置,混凝土界面监测装置包括浮球10和调控机构,浮球10小于混凝土密度且大于泥浆的密度,浮球10通过连接绳11与收放机构12连接,以改变连接绳11的收放长度,调控机构与收放机构12连接,以使连接绳11的拉力值在阈值范围内,阈值范围为当浮球10处于混凝土40和泥浆41的交界面上时连接绳11的拉力范围值,监测方法包括:
S1:将连接有连接绳11的浮球10置于混凝土40和泥浆41的交界面上;
S2:随着混凝土40和泥浆41的交界面的上升,调控机构控制收放机构12的收放状态以使连接绳11的拉力值在阈值范围内。
使用方法及工作原理:本实施例中请参阅图1,保护壳1采用铁皮制成,且没有底部,与座板3构成长方形整体,外壳厚度约4mm厚,显示屏2嵌入在保护壳1外壁前侧,与外壁前侧卡接固定,船形开关4采用硬质塑料制成,与显示屏2平行设置,圆形通孔7贯穿于保护壳1外壁一侧,且位外壁一侧的正中心位置,开孔半径约为五厘米,保护壳1采用无底的设计,便于与底座3结合成一个整体,既节约材料,又方便设备的搬运,维修和拆卸,设置的显示屏2采用嵌入式设计,方便显示屏2的安装,同时也防止施工的灰尘落入显示屏31表面。本实施例中请参阅图1、图2,连接轴122和卷线器120均采用轻质塑料制成,扭矩传感器的两端分别与连接器A12和连接器B14固定连接,连接器A12和连接器B14的另外一段分别与步进电机的电机轴和连接轴122相连,形成一条完整的传动轴,卷线器120在步进电机的通过传动轴带动下保持相同的角速度旋转。
根据实际情况,在本实施例中的混凝土界面监测装置中,混凝土界面与浮球会出现三种可能的位置关系:
第一种,混凝土界面的上升速度与浮球10的上升速度一致,此时浮球10位于理想的混凝土-泥浆界面,混凝土40与泥浆41对浮球10的浮力与浮球10自身受到的重力大小相等方向相反,连接浮球10的连接绳11作用在卷线器120上的力处于设定的拉力和张力的临界值,此时卷线器120的线速度大小与混凝土界面的上升速度处于动态平衡之中。
第二种,如图4所示,混凝土界面的上升速度大于浮球10的上升速度,此时浮球10球体大部分浸没在混凝土中,由于浮球10的密度小于混凝土40的密度,浮球10自身受到的作用力体现在混凝土40对浮球10的浮力,使得浮球10有向上运动的趋势,忽略此时混凝土界面的上升,浮球10上端接的连接绳11会出现张力,由于力的相互作用,使得连接卷线器120的连接轴122的扭矩减小,则处理器201控制步进电机的转向使卷线器120将连接绳11拉短,最终的结果使连接绳11拉紧,其受力处于拉力和张力的临界值,浮球的位置处于理想的混凝土-泥浆界面。
第三种,如图5所示,混凝土界面的上升速度小于浮球10的上升速度,此时浮球10球体大部分或者全部处于混凝土40界面上方的泥浆41中,由于浮球10的密度大于泥浆的密度,浮球10自身受到的作用力体现在浮球10自身的重力,使得浮球10有向下运动的趋势,忽略此时混凝土界面的上升,浮球10上端接的连接绳11会出现拉力,由于力的相互作用,使得连接卷线器120的连接轴122的扭矩增大,则处理器201控制步进电机的转向使卷线器120将连接绳11放长,最终的结果使得连接绳11舒张,其受力处于拉力和张力的临界值,浮球10的位置为与理想的混凝土-泥浆界面。
在本实施例中,扭矩传感器选用应变型静态扭矩传感器,静态扭矩传感器一端与另一端不能相对运动,在施加扭力时,传感器内部梁体会有相对运动趋势,使得核心梁体发生形变,促使贴在梁体上的应变片按照一定倍数响应的发生形变,从而导致应变片的电阻线性变大或变小,应变片在传感器内部组合成全桥并进行温度、零点、灵敏度等参数补偿后,外加激励电源从而输出差分mv(毫伏)电压信号,此信号大小跟随扭力大小线性变化。
基于扭矩传感器的混凝土界面监测装置属于单轴机构,步进电机最终需驱动绳轮转动,所以驱动机构为绳轮式的卷线器结构,通过步进电机带动绳轮不断收紧连接绳11。卷线器总体呈圆柱形状,外边直径约15cm,内边直径约8.5cm,选取硬塑料材质制成的卷线器,自身质量较轻。浮球的质量控制在1kg以内。根据负载转矩的理论计算式:
T
其中,TL为负载转矩,又称为阻转矩,单位N.m;
F为着力点受力,单位N;
R为从转动轴到着力点的距离矢量,单位m。
由已经给出各结构的参考数值,着力点受力F约为10N,转动轴到着力点的矢量距离R最大约为0.15m,负载转矩TL为1.5N.m,同时增加部分转矩裕度,故算出步进电机的转矩约为2N.m,根据此数值寻找满足要求的步进电机型号。
工作流程如下:
参考图6,水下混凝土40灌注桩灌注开始后,待第一漏斗的混凝土40灌注后,将连接有连接绳11的浮球10抛掷于钢筋笼42与桩体内壁之间的缝隙内,由于浮球10采用特殊材料制成的,浮球10在自然状态下会位于混凝土40和泥浆41的交界面,浮球10的高度会跟着混凝土40泥浆41界面的上升而上升,启动设备后,正常情况下步进电机匀速转动,带动卷线器120收紧连接绳11,始终保证连接绳11的拉力产生的转矩始终保持在一个阈值范围内,在这一过程中扭矩传感器保持对扭矩的不断监测;当混凝土40灌注速度小于卷线器120的收线速度时,浮球10会在连接绳11的带动下位于混凝土40界面的上方,此时连接绳11的拉力变大,产生加大的扭矩信号,扭矩传感器监测到这一扭矩的变化,经过信号调理电路后可将采集到的信号传递给处理器201,经过处理器201程序的控制,向步进电机发出一个信号,使步进电机带动卷线器120放长连接绳11,最终使得浮球10位于交界面处;当混凝土40灌注速度大于卷线器120的收线速度时,浮球10所系的连接绳11松弛,拉力减小,扭矩信号相应的减弱,扭矩传感器监测到这一扭矩的变化,经过信号调理电路后可将采集到的信号传递给处理器201,信号经过经过处理器201程序识别和对比,向步进电机发出一个控制信号,使步进电机带动卷线器120收短连接绳11,最终使得浮球10位于交界面处。通过以上步进电机的工作模式,最终的目是保持连接绳11在浮球10的作用下始终是绷紧的,在此背景下,通过显示屏31显示连接绳11的下沉长度,即浮球10的下沉深度,可以间接反映出混凝土40界面的距离,实现对混凝土40界面的监测,并根据设定的阈值报警,当混凝土40界面上升到一定高度时,会触发报警指令,通过处理器201控制,实现报警器30的警笛,提醒施工人员,在保证工程质量的情况下,减少浪费达到实时监测的目的。
本发明提供的一种混凝土界面监测装置,体积较小,方便转场携带,在监测过程中不影响整体的施工过程;同时装置控制过程简单、方便,现场学习,快速上手,而且不需要施工人员过多操控,极大的提高了装置的应用范围
以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
- 一种混凝土界面监测装置及监测方法
- 基于压电阻抗测量的钢管混凝土管壁界面剥离监测方法