一种考虑列车精准停车因素的ATO速度命令节能优化方法
文献发布时间:2023-06-19 12:24:27
技术领域
本发明属于城市轨道交通技术领域,具体涉及一种考虑列车精准停车因素的ATO(自动列车运行装置,Automatic Train Operation)速度命令节能优化方法。
背景技术
随着科技的飞速发展,目前城市轨道交通的状态达到了列车运行速度得到了提升、行车密度也得到了加大,在为广大民众的出行带来便利的同时,也导致传统的人工驾驶无法同时顾及到多个性能指标,由此列车系统的自动控制研究显得尤为重要。但是基于在无法立即扩大城市轨道交通运行体系的情况下,可以将由机车乘务人员驾驶高速列车的模式升级为列车自动驾驶模式,以保证列车在线路上安全的运行。人工驾驶升级为列车自动驾驶是科技进步的体现,也是未来城市轨道交通系统运营方式的大趋势。
目前自动驾驶系统控制高速列车在线路上运行需满足五项指标:安全性、准时性、停车精准性、舒适性与节能性,但现阶段绝大多数对于列车自动驾驶控制研究停留在节能性这一单一性能指标上,没有对五个性能指标综合考量。由此,针对列车不能精准停车而影响乘客乘坐体验,甚至影响运营中的列车运行的情况,本发明提出此优化方法。
发明内容
发明目的:本发明提出一种节约耗能、降低成本的考虑精准停车因素的ATO速度命令节能优化方法,使列车行车始终出于安全可靠的状态内,并能减小精准停车距离的误差限额。
技术方案:本发明所述的一种考虑列车精准停车因素的ATO速度命令节能优化方法,具体包括以下步骤:
(1)基于多目标粒子群优化算法建立列车精准停车模型,得出考虑到精准停车的停车目标点;
(2)建立列车运行仿真模型;
(3)以列车运行能耗为优化目标,对ATO速度命令进行优化,最终得到节能ATO速度命令集。
进一步地,所述步骤(1)包括以下步骤:
(11)初始化粒子的位置、速度和个体引导者;
(12)评价粒子的适应度值及和Pareto支配关系;
(13)保存非劣解到储备集;
(14)选择粒子的全局引领者;
(15)更新粒子的速度和位置公式;
(16)再次评价粒子的适应度值及和Pareto支配关系;
(17)更新粒子的个体引导者;
(18)更新外部储备集;
(19)判断是否达到目标,当结果收敛,则结束算法,输出结果;否则,返回步骤(14)继续更新算法。
进一步地,步骤(2)所述列车运行仿真模型包括数据输入模块、列车自动运行计算模块、列车牵引制动计算模块、列车动态计算模块和耗能仿真计算模块;
所述数据输入模块,包括ATO参数模块、线路数据模块和列车数据模块;所述ATO参数模块提供ATO速度命令和速度调节算法参数;所述线路模块提供线路站点位置列表和坡道弯道列表数据;所述列车数据模块提供列车运行基本运行参数;所述基本运行参数包括列车编号编组、载客量、基本阻力参数、逆变器效率、牵引制动特性;
所述列车自动运行计算模块,依据列车当前运行状态、ATO参数与线路数据,计算当前运行状态下的列车加速度,实现列车工况的保持与转换;
所述列车牵引制动计算模块,根据列车加速度、线路数据与列车数据,计算列车牵引力或制动力;
所述列车动态计算模块,根据牵引力或制动力大小、列车加速度及列车运行动力学方程,计算列车下一步运行状态;
所述耗能仿真计算模块,依据列车各部分模块提供的数据,计算列车当前的牵引能耗。
进一步地,所述步骤(3)包括以下步骤:
(31)获取列车的原始信息,涉及路线数据、列车数据、控制变量速度、粒子群的大小以及学习因子等参数;
(32)粒子的初始化,随机产生一组种群使其满足速度变量的取值范围,并随机产生初始速度,并设置最大迭代次数;
(33)调用列车运行曲线计算程序,利用列车运行过程中的动力学模型,基于不同的性能指标权重值,计算列车运行过程中的运行时间、能量消耗、运行距离以及舒适度等值,从而计算出粒子的适应度值及个体与全局的最优值;
(34)构造小生境群体,计算粒子间的欧氏距离,得到小生境半径从而得到的小生境群体,利用公式对小生境群体进行速度和位置的更新;
(35)针对小生境群体X
(36)更新后的个体按照上述的过程更新计算,同时,针对每个小生境群体也按照上述原理进行计算与更新操作;
(37)判断是否达到最大迭代次数或者满足预设条件,是,则结束程序,输出结果;否,则转步骤(33)继续进行迭代。
进一步地,步骤(33)所述的不同的性能指标权重值的计算过程如下:
a)构造客观评论矩阵O与主观评价矩阵S;
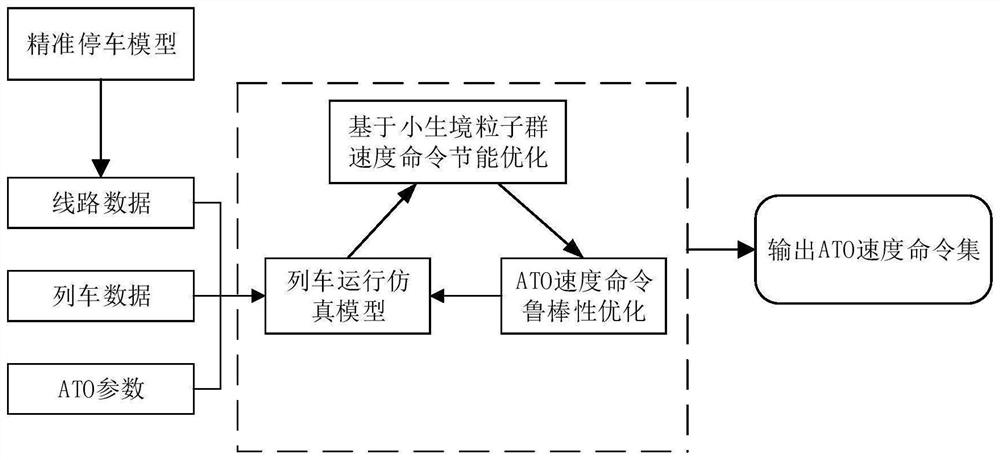
b)选取u(0 c)通过组合矩阵B,利用和法,计算相关权重。 有益效果:与现有技术相比,本发明的有益效果:1、在设计ATO速度命令时考虑了列车可能出现停车不准确的情况,使设计的ATO速度命令更贴切于列车实际运营情况,更好的达到降低能耗的目标;2、采用了基于小生境粒子群的智能优化算法,列车进站保持停车最大误差小于0.3m,且大部分停车误差在0.1m左右;3、在满足ATO速度命令鲁棒性要求的基础上,将小生境粒子群优化算法应用于ATO速度命令设计,采用传统的层次分析法与粗糙集理论相结合的方法,使得最终设计得到的ATO速度命令在满足舒适与安全的要求的基础上,兼顾运行过程中的牵引节能;4、本发明只需要对ATO设备配置参数进行修改,不需进行其他的复杂操作,具有较高的可行性。 附图说明 图1为本发明流程图; 图2为本发明中建立多目标粒子群优化算法流程示意图; 图3为本发明中小生境粒子群优化ATO速度命令集的流程示意图; 图4为列车行驶线路的a-t曲线图; 图5为列车行驶线路的优化a-t曲线图; 图6为列车行驶线路运行的v-s曲线图; 图7为列车行驶线路运行的v-s曲线图。 具体实施方式 下面结合附图对本发明作进一步详细说明。 在实际的运营组织中,由于各种突发情况和随机干扰的存在,运营中的列车会在一定程度上偏离既有运营计划,直观表现为列车进站停车误差变大,精准停车准确性减小。而对于车载ATO系统而言,列车是其控制对象,在给定ATO速度命令参数后,当控制对象的状态发生变化时,必然会影响ATO系统控制的控制精度。 本发明提出一种考虑列车精准停车因素的ATO速度命令节能优化方法,如图1所示,具体包括以下步骤: 步骤1:基于多目标粒子群优化算法建立列车精准停车模型,得出考虑到精准停车的停车目标点。如图2所示,具体包括以下步骤: (1.1)初始化粒子的位置、速度和个体引导者; (1.2)评价粒子(适应值和Pareto支配关系); (1.3)保存非劣解到储备集; (1.4)选择粒子的全局引领者; (1.5)更新PSO公式(速度和位置公式); (1.6)再次评价粒子(适应值和Pareto支配关系); (1.7)更新粒子的个体引导者; (1.8)更新外部储备集; (1.9)判断是否达到目标,当结果收敛,则结束算法,输出结果;否则,返回步骤(1.4)继续更新算法。 步骤2,建立列车运行仿真模型; 列车运行仿真模型包括数据输入模块、列车自动运行计算模块、列车牵引制动计算模块、列车动态计算模块和耗能仿真计算模块,其中: 数据输入模块,包括三个子模块,分别是ATO参数模块、线路数据模块和列车数据模块;ATO参数模块提供ATO速度命令和速度调节算法参数,线路模块提供线路站点位置列表和坡道弯道列表数据,列车数据模块提供列车运行基本运行参数,基本运行参数包括列车编号编组、载客量、基本阻力参数、逆变器效率、牵引制动特性。 列车自动运行计算模块,一句列车当前运行状态、ATO参数与线路数据,计算当前运行状态下的列车加速度,实现列车工况的保持与转换。 列车牵引制动计算模块,根据列车加速度、线路数据与列车数据,计算列车牵引力或制动力。 列车动态计算模块,根据牵引力或制动力大小、列车加速度及列车运行动力学方程,计算列车下一步运行状态。 耗能仿真计算模块,依据列车各部分模块提供的数据,计算列车当前的牵引能耗。 步骤3,以列车运行耗能为优化目标,对ATO速度命令进行优化,最终得到节能ATO速度命令集,如图3所示,具体如下: (3.1)获取列车的原始信息,涉及路线数据、列车数据、控制变量速度、粒子群的大小以及学习因子等参数。 列车原始数据即行车数据,具体包括: ①列车实际运行距离:列车实际运行距离是指列车行驶至目标车站的实际距离; ②列车目标运行距离:列车目标运行距离是指列车理论上运行至目标车站的理想距离; ③误差距离限额:列车实际运行距离与列车目标运行距离之间的误差; ④行车约束集:行车约束集包括列车的追踪间隔、车站的容量限制、计划的行车顺序; ⑤列车种类:不同的列车种类误差距离限额标准不一样。 (3.2)粒子的初始化,随机产生一组种群使其满足速度变量的取值范围,并随机产生初始速度,并设置最大迭代次数。 (3.3)调用列车运行曲线计算程序,主要利用列车运行过程中的动力学模型,基于不同的性能指标权重值,计算列车运行过程中的运行时间、能量消耗、运行距离以及舒适度等值,从而计算出粒子的适应度值及个体与全局的最优值。 不同的性能指标权重值的计算步骤包括: (a)构造客观评论矩阵O与主观评价矩阵S; (b)选取u(0 (c)通过组合矩阵B,利用和法,计算相关权重。 (3.4)构造小生境群体,计算粒子间的欧氏距离,得到小生境半径从而得到的小生境群体,利用公式对小生境群体进行速度和位置的更新。 采用欧氏距离平均值的方法来确定小生境半径,解决了传统的小生境半径通过特定问题的先验知识进行计算的这一个应用范围的局限问题,确保了良好的划分机制对后期的搜索。 (3.5)针对小生境群体X (3.6)更新后的个体按照上述的过程更新计算,同时,针对每个小生境群体也按照上述原理进行计算与更新操作。 (3.7)判断是否达到最大迭代次数或者满足预设条件,是,则结束程序,输出结果;否,则转步骤(3.3)继续进行迭代。 在列车运行过程中,将面临如限速等多种复杂情况,为了对不同情况进行考察,选取列车线路数据,对列车在此线路上运行模式曲线与经小生境粒子群优化后的列车运行曲线进行仿真。图4、图5分别为列车针对路线运行的s-v曲线以及优化后的s-v曲线图,图6、图7分别是列车运行前后a-t曲线图,将列车优化前后性能指标进行对比,结果如表1所示。 表1优化性能对比表
从表1得知,针对包含限速的列车运行情况,使用NPSO可以实现优化目的。经分析有:在列车运行过程中,仅有运动时间指标保持在较优的水平,而其他性能水平较低;使用算法优化后的列车运行过程中,其耗能减少了34.05%,停车精度提高了28.57%,运行时间都在规定时间1438s之内,舒适度也提高了32.68%,加速度随时间变化如图7,在舒适范围之内。因此对于包含限速的情况,NPSO算法也能实现优化的目的。 综上所述,本发明方法可以得到考虑精准停车因素的ATO速度命令集。在实际的运营组织中,由于各种突发情况和随机干扰的存在,运营中的列车会在一定程度上偏离既有运营计划,直观表现为列车进站停车误差变大,精准停车准确性减小。而对于车载ATO系统而言,列车是其控制对象,在给定ATO速度命令参数后,当控制对象的状态发生变化时,必然会影响ATO系统控制的控制精度。根据本文提出的控制方法得出的ATO命令集,可使列车行车始终处于安全可控的状态范围之内。
- 一种考虑列车精准停车因素的ATO速度命令节能优化方法
- 一种考虑列车晚点因素的ATO速度命令节能优化方法