一种永磁电机初始转子位置及速度检测方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及轨道交通牵引传动系统领域,在无位置传感器条件下永磁同步电机进行带速重投时实现电机初始转子位置和转速的检测。尤指一种永磁电机初始转子位置及速度检测方法。
背景技术
不同于异步电机,永磁同步电机采用永磁体励磁,不需要提供励磁电流,使得永磁同步电机具有结构简单、功率密度高等优势,被广泛应用于轨道交通牵引传动系统等领域。
为了解决位置传感器应用于牵引传动系统时造成的系统成本增加、空间减小、可靠性降低等缺陷,无位置传感器控制技术逐步发展成为当下的研究热点。在牵引传动系统中,带速重投控制是电力机车必须具备的功能。然而在无位置传感器条件下,系统无法检测得到电机转子位置和转速,如若初始转子位置和速度存在较大误差,重投过程可能会造成很大的电流冲击,甚至损坏系统部件。
现有文献中,通常采用短路电流法和基于电压传感器的反电势观测法对电机转子位置和转速进行估计。申请号为CN201310512095.0的专利利用了短路电流法,控制系统向电机注入零电压矢量,检测电机绕组短路电流,通过注入电压和短路电流估算得到转子位置和转速信息。该方法并不复杂,但对短路时间有较高的要求,若短路时间较短,短路电流较小,电流传感器对短路电流采样时的测量误差较大;若短路时间较长,会造成较大的电流冲击,长此以往影响系统设备的正常运行。在反电势观测法中,需利用电压传感器检测电机端电压,通过检测电压幅值来估计电机转子位置和转速,申请号为CN201811188488.X的专利设置了3个电压传感器用于采集电机三相端电压,申请号为CN201910398876.9的专利设置了1个电压传感器用于采集定子线上感应电动势信号,电压传感器的利用增大了系统的费用成本和空间成本。
因此,设计一个简单低成本的电机转子位置及转速估计方法,具有重要的意义。
发明内容
本发明提出了一种简单低成本的电压检测方法,设计了一种采样电路,通过输出脉冲信息可简单估计出电机转子位置和转速信息,为无位置传感器条件下电机带速重投控制提供了较为准确的电机转子位置初始角和初始转速,实现了较好的带速重投控制的性能。与传统方法不同,本发明没有用到电压传感器,无需准确检测出电机反电势幅值信息,只需要检测出采样电路输出脉冲信号就可以估计出电机转子位置和转速信息。
为达到以上目的,本发明采取的技术方案是:
一种永磁电机初始转子位置及速度检测方法,具体包括:
步骤1:设计采样电路,利用采样电路对断电状态下永磁同步电机反电势正弦线电压进行采样,输出脉冲信号;
步骤2:将采样电路输出的脉冲信号输入至控制器,利用控制器对电机转子位置和电机转速进行估计,得到估计值;
步骤3:利用电机转子位置和电机转速的估计值进行带速重投控制操作。
在上述方案的基础上,步骤1中,永磁同步电机反电势正弦线电压包括:正弦线电压u
在上述方案的基础上,所述正弦线电压u
电机A相接线端与限流电阻R
在上述方案的基础上,所述光耦芯片的型号为:HCPL-0630-500E。
在上述方案的基础上,步骤1中,所述正弦线电压u
当为正弦线电压u
当为正弦线电压u
3个采样电路共输出6路脉冲信号输入至控制器。
在上述方案的基础上,所述脉冲信号包括:低电平信号和高电平信号,当正弦线电压幅值大于阈值电压|±U
在上述方案的基础上,所述阈值电压|±U
在上述方案的基础上,在步骤2所述控制器中设置1个时钟一,用于记录采样电路6路脉冲信号由高电平跳变为低电平后的时刻,当任意一路脉冲信号由高电平跳变为低电平时,记为零时刻,直至下次任意一路脉冲信号由高电平向低电平的跳变时,记录相邻两次脉冲信号由高电平向低电平跳变的时间间隔T
在上述方案的基础上,步骤2具体包括:
相邻两次脉冲信号由高电平向低电平跳变对应的角度差为π/3,时间间隔为T
输出信号由高电平跳变为低电平时刻所对应的转子位置为θ
其中,T
除由高电平跳变为低电平时刻外,0~T
θ
其中,t
采样电路具体工作原理如下:
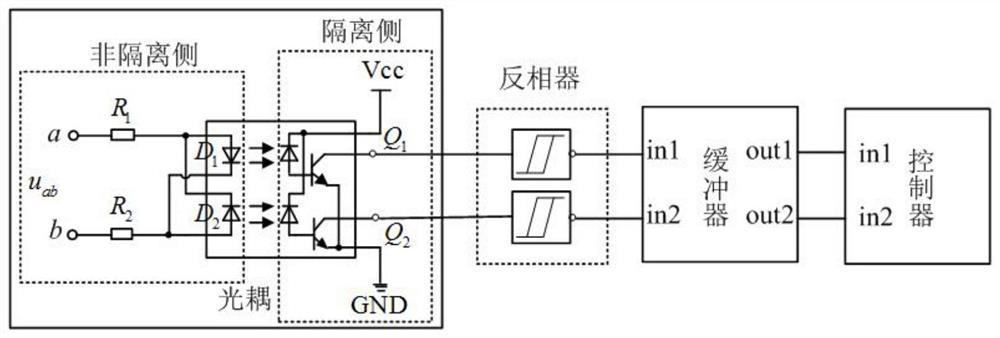
设计的采样电路示意图如图1所示,采样电路输入信号为永磁电机正弦线电压u
输入为3路正弦线电压信号u
当正弦线电压幅值大于阈值电压|±U
采样电路输入及输出信号如图2所示,步骤2中根据采样电路输出脉冲信号对电机转子位置和转速进行估计的具体工作原理如下:
利用采样电路对电机反电势正弦线电压进行采样,在控制器中设置一个时钟一,获取采样电路6路输出信号高电平跳变为低电平的时刻。当某路输出信号由高电平跳变为低电平时,时钟一从零时刻开始计时,直至下次输出信号电平状态实现由高电平向低电平的跳变,记录相邻两次脉冲信号由高电平向低电平跳变的时间间隔T
相邻两路信号高低电平跳变位置相差π/3,令π/3除以中计算的时间间隔T
一个基波周期6路信号存在由高电平向低电平的跳变,因此在一个基波周期内电平状态由高向低跳变6次,在电平状态跳变处可实现转速的6次更新。
3个采样电路共包含6路输出信号,在控制器中设置6个时钟二,用于分别对每路信号进行计时。当输出信号由低电平跳变为高电平时,时钟二从零时刻开始计时;当输出信号由高电平跳变为低电平时,时钟二停止计时并记录时间T
输出信号由高电平跳变为低电平时刻所对应的转子位置为θ
其中,T
除由高电平跳变为低电平时刻外,0~T
θ
其中,t
本发明的有益效果:
本发明提出了一种简单低成本的电压检测方法,设计了一种采样电路,通过输出脉冲信息可简单估计出电机转子位置和转速信息,为无位置传感器条件下电机带速重投控制提供了较为准确的电机转子位置初始角和初始转速,实现了较好的带速重投控制的性能。
附图说明
本发明有如下附图:
图1为采样电路示意图。
图2为采样电路输入及输出信号示意图。
图3为三相两极交流永磁同步电机物理模型示意图。
图4为线电压峰值与转子位置对应关系示意图。
具体实施方式
以下结合附图1~4对本发明作进一步详细说明。
本申请以三相两极交流永磁同步电机为例进行说明,根据图3三相两极交流永磁同步电机物理模型可知,转子磁极围绕着三相定子绕组逆时针旋转,设转子d轴方向与A相绕组之间的夹角为θ,则定子绕组相电压为:
其中,u
根据电机模型d-q轴电压方程易知,断电状态下d-q轴电压方程满足:
其中,ω
将式(4)代入式(5)得定子绕组反电势相电压,如公式(6)所示:
正弦线电压u
因此,正弦线电压u
将该对应关系在图中表示出来,如图4所示:
正弦线电压u
采样电路输入电压为电机反电势正弦线电压信号,以正弦线电压u
U
当电机反电势超过阈值电压U
由此,采样电路的输入与输出之间存在以下关系,其中u
所述正弦线电压u
采样电路输入信号幅值大于阈值电压时,输出高电平,所述高电平为3.3V,小于阈值电压时,输出低电平,所述低电平为0V。
由此可建立采样电路输入电压与输出电平状态之间的对应关系,如图2所示。
从图2中可以看出,角度0、π/3、2π/3、π、4π/3、5π/3分别对应采样电路6路输出高电平信号的中间位置。
设6路信号O
电机转速可由公式(1)进行估计
为了检测6路信号O
θ
θ
以此类推,在一个基波周期内速度和角度估计初值可进行6次更新,一个基波周期内的角度可由公式(12)估计得到:
式中,下标x=1,2,…,6,θ
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
- 一种永磁电机初始转子位置及速度检测方法
- 一种永磁电机转子初始位置检测方法