一种铁路客站基于BIM模型的测量放样机器人施工方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明属于建筑领域,尤其涉及建筑施工技术。
背景技术
在跨越营业线路钢结构天桥施工测量、大型屋面钢结构提升定位既有站场测量和多曲面幕墙等施工精度控制高的建筑工程测量领域,经常是大型站场枢纽为多条铁路的交汇处,面积大、地物多、利用传统的全站仪进行测量,受站内建筑物、列车占道等外部条件影响,需要等待列车离开或频繁转点,测量难度大,工作效率低。
同时铁路客站站房工程屋盖桁架结构形式复杂、圆管相贯节点,多根杆件贯于一点的情况非常多,测量精度要求高、点位多、放线辅助线多、工作量大。传统的全站仪测量要解决这种情况只能增加机位,或者延长工期,对于项目的成本增加非常多。
发明内容
本发明目的在于提供一种铁路客站基于BIM模型的测量放样机器人施工方法,以解决利用全站仪进行测量,测量难度大,工作效率低的技术问题。
为解决上述技术问题,本发明的具体技术方案如下:
一种铁路客站基于BIM模型的测量放样机器人施工方法,其特征在于,包含如下步骤:
步骤1:使用BIM放样机器人从图纸或模型中获取结构坐标;
步骤2:RTS设站;
步骤3:从模型上捕捉点;
步骤4:放样测量;
步骤5:生成放样报告;
步骤6:更新数据模型。
进一步的,所述步骤2中,设站方式采用任意点设站、已知点设站或无数据设站。
进一步的,所述步骤3中从模型上捕捉的点,用作控制点、后视点或特征点。
进一步的,所述步骤4中包括钢结构吊装作业放样和机电全专业的放样。
进一步的,所述机电全专业的放样采用贯通点放样技术。
进一步的,所述步骤5中,BIM放样机器人可对现场进行拍照记录。放样数据和采集数据。
进一步的,所述步骤6中,将步骤5中所述放样报告导回到cad或模型中,放样机器人会自动检测每个点的放样误差并生成偏差报告更新数据模型。
本发明的技术方案具有以下优点:
1.BIM模型直接导入手簿,在工作现场直接查看三维模型,可视性强,测量和放样工作直接使用三维模型。从模型上通过点击捕捉来创建点,用于直接放样,避免了传统作业中点坐标计算、抄写、输入等繁琐过程和出错机会,用户甚至都不必知道点的坐标就可完成放样。
2.测量人员可以手持棱镜和手簿在工地现场四处移动作业,而不必回到仪器设站处,因此该技术也为单人作业创造了条件。
3.操作人员可携带手簿和棱镜在工地走动,在手簿界面的引导下,寻找和接近目标点位,并在点位处点击手簿进行测量,手簿发出无线遥控指令,控制RTS主机完成对棱镜的测量,而将测量结果通过无线传输给手簿显示和存储。这种遥控方式为单人作业提供了条件。
4.即通过主机上的相机进行拍摄,并将图像实时传输和显示在手簿上,用户可以从手簿画面上查看照准情况,或者在画面中直接点击目标,则RTS自动照准该点目标。作业人员不必回到主机设站处,然后通过望远镜目镜来查看是否照准,因此效率上有很大提高。
附图说明
图1为本发明的流程示意图;
图2为本发明的RTS 任意设站示意图;
图3为贯通点放样示意图;
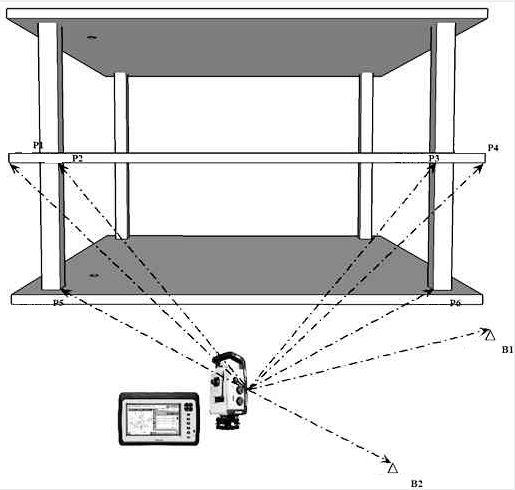
图4为机器人放样示意。
具体实施方式
为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种铁路客站基于BIM模型的测量放样机器人施工方法,做进一步详细的描述。
一种铁路客站基于BIM模型的测量放样机器人施工方法,包含如下步骤:
步骤1:使用BIM放样机器人从图纸或模型中获取结构坐标,将放样的数据导入BIM放样机器人的控制设备;
步骤2:RTS设站,在施工现场需要放样的区域,选择一个比较稳定、安全的地点,避免强磁场和震动区域;
步骤3:从模型上捕捉点,用作控制点、后视点或特征点;
步骤4:放样测量;完成设站操作后,选择目标点,在目标处显示高亮的激光点,工人在光点处做标记,即完成放样操作;
步骤5:放样机器人会自动检测每个点的放样误差并生成偏差报告;BIM放样机器人可对现场进行拍照记录、放样数据和采集数据;
步骤6:步骤5中的放样报告导回到cad或模型中,放样机器人会自动检测每个点的放样误差并生成偏差报告更新数据模型,用于变更设计,或者用于展示工程进度。
在步骤1中,从BIM模型中设置现场控制点坐标和建筑物结构点坐标分量作为BIM模型复合对比依据,在BIM模型中创建放样控制点。将BIM设计模型直接导入RTS机器人的手簿设备上,然后通过在手簿上点击捕捉的方式创建点目标。
在步骤2中RTS设站,设站方式可以采用任意点设站、已知点设站或无数据设站中的任意一种。如图2所示,RTS任意点设站时,采用3个后视点。
步骤4中包括钢结构吊装作业放样和机电全专业的放样。
机电全专业的放样采用贯通点放样技术。如图3所示,贯通放样技术,
BIM技术是结合测量机器人的应用,实现在BIM平台内的现场施工和设计模型的三维数字信息交互。通过点对点的放样技术解决了铁路客站大型屋面钢结构提升定位、多曲面幕墙定位和复杂管线的安装和跨越既有线天桥等施工难度大安全性高的施工难题,提高了施工效利用测量机器人采集现场施工成果的数字信息,实现精准全面的施工质量验收针对管道或者线缆穿越墙壁时,已知A,B两点坐标,通过放线机器人可以直接放出穿墙点(P点)的位置。
如图4所示,机器人放样时,先对照后视点B1和B2,再进行放样(P1~P6点)。放样机器人技术与传统施工测量方法比较,改变传统施工方法,提出并实现现场与BIM模型相结合的理念,有效衔接设计与施工,利用测量机器人的坐标采集功能实现了BIM平台内的现场施工和设计模型的三维数字信息交换,通过测量机器人完成了大型铁路站房异形结构高效精准定位,推进BIM技术从设计模型到现场施工阶段的延伸,降低信息传递过程中的衰减。通过深度消费BIM模型和快速采集现场施工信息来提高施工效率、保证施工质量、快速检查现场施工问题、与设计BIM结合,及时高效地指导施工作业,从而达到降低施工难度,提高工作效率的目的。
现场利用机器人放线,解决了铁路客站大型屋面钢结构提升定位、多曲面幕墙定位等施工难度大、安全性高的技术难题,提高了施工效利用测量机器人采集现场施工成果的数字信息,实现精准全面的施工质量验收。
菏泽东站为新建工程,车站距离菏泽市区7.6km,距离定陶县城12.7km,距离菏泽机场约20km。设于日兰高速南侧,仓南路以西,东鱼河以东。菏泽东站总建筑面积为60000平方米,建筑高度为38.1。站房共四层,地下出站层、地上站台层,高架层及高架夹层。在基础底板、机电安装和钢结构测量放线施工过程中引进了BIM放样机器人施工方法,随后其工作效率得到较大提升,而测量精度符合项目技术要求。
实施例1
一种铁路客站基于BIM模型的测量放样机器人施工方法,包含如下步骤:
步骤1:使用BIM放样机器人从图纸或模型中获取结构坐标,将放样的数据导入BIM放样机器人的控制设备;
步骤2:RTS设站,设站方式可以采用任意点设站,在施工现场需要放样的区域,选择一个比较稳定、安全的地点,避免强磁场和震动区域;
步骤3:从模型上捕捉点,用作控制点、后视点或特征点;
步骤4:放样测量;完成设站操作后,选择目标点,在目标处显示高亮的激光点,工人在光点处做标记,即完成放样操作;
步骤5:放样机器人会自动检测每个点的放样误差并生成偏差报告;BIM放样机器人可对现场进行拍照记录、放样数据和采集数据;
步骤6:步骤5中的放样报告导回到cad或模型中,放样机器人会自动检测每个点的放样误差并生成偏差报告更新数据模型,用于变更设计,或者用于展示工程进度。
实施例2
一种铁路客站基于BIM模型的测量放样机器人施工方法,包含如下步骤:
步骤1:使用BIM放样机器人从图纸或模型中获取结构坐标,将放样的数据导入BIM放样机器人的控制设备;
步骤2:RTS设站,设站方采用已知点设站,通过光学对中瞄准镜将设备对中到已知点位上,整平设备后再照准另外一个或多个后视点用于设备定向;在施工现场需要放样的区域,选择一个比较稳定、安全的地点,避免强磁场和震动区域;
步骤3:从模型上捕捉点,用作控制点、后视点或特征点;
步骤4:放样测量;完成设站操作后,选择目标点,在目标处显示高亮的激光点,工人在光点处做标记,即完成放样操作;
步骤5:放样机器人会自动检测每个点的放样误差并生成偏差报告;BIM放样机器人可对现场进行拍照记录、放样数据和采集数据;
步骤6:步骤5中的放样报告导回到cad或模型中,放样机器人会自动检测每个点的放样误差并生成偏差报告更新数据模型,用于变更设计,或者用于展示工程进度。
实施例3
如图3所示,一种铁路客站基于BIM模型的测量放样机器人施工方法,包含如下步骤:
步骤1:使用BIM放样机器人从图纸或模型中获取结构坐标,将放样的数据导入BIM放样机器人的控制设备;
步骤2:RTS设站,采用任意点设站,在施工现场需要放样的区域,选择一个比较稳定、安全的地点,避免强磁场和震动区域;
步骤3:从模型上捕捉点,用作控制点、后视点或特征点;
步骤4:放样测量;机电全专业的放样采用贯通点放样技术,完成设站操作后,选择目标点,在目标处显示高亮的激光点,工人在光点处做标记,即完成放样操作;
步骤5:放样机器人会自动检测每个点的放样误差并生成偏差报告;BIM放样机器人可对现场进行拍照记录、放样数据和采集数据;
步骤6:步骤5中的放样报告导回到cad或模型中,放样机器人会自动检测每个点的放样误差并生成偏差报告更新数据模型,用于变更设计,或者用于展示工程进度。
实验例1
在土建阶段施工中,人员配置:测量工程师1人,测量工2人,土建BIM模型工程师1人。
实验例2
在机电安装阶段施工中,人员配置:测量工程师1人,测量工2人,机电BIM模型工程师1人。
实验例3
在装修安装阶段施工中,人员配置:测量工程师1人,测量工2人,装修BIM模型工程师1人。
对照例1
在哈尔滨轨道交通2号线1期工程,主体围护施工中,总建筑面积24065.62平方米。使用全站仪2台,配备测量工程师1人,测量工5人。
从实验例可以看出,本申请的技术中,需要的测量人员的数量大大减少,需要的仪器数量也大大减少。
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本发明所保护的范围内。
- 一种基于BIM的施工测量放样装置及其放样方法
- 一种基于BIM的施工测量放样装置及其放样方法