XMR影像引导的脑深部电极植入机器人
文献发布时间:2023-06-19 18:34:06
技术领域
本发明属于医疗器械的技术领域,尤其涉及一种XMR影像引导的脑深部电极植入机器人。
背景技术
深度脑刺激(Deep brain stimulation,DBS)技术是一种对大脑进行可逆性调控的手段,它通过手术将电极植入到大脑特定脑区,发送一定频率的电脉冲,对异常的大脑放电进行调控,从而达到改善或治疗疾病的目的。而DBS手术时,需要通过影像设备(暨核磁共振环境下)对大脑进行扫描成像,辅助定位,然后在置入电极。
目前,用于辅助脑电极置入的装置,多采用被动式人工安置弧形架(如Leksell和CRW),但这种方式往往达不到较高的定位精度。
发明内容
本发明的目的是提供一种XMR影像引导的脑深部电极植入机器人,利用空间中沿两个相交轴线方向旋转,可以实现工作空间内任意一点的定位,同时通过增加微动平台进行细微调整,进一步提高机器人对脑电极定位的精度。
为解决上述问题,本发明的技术方案为:
一种XMR影像引导的脑深部电极植入机器人,包括:
底座,
第一驱动组件,固定于所述底座上;
第一空间运动组件,与所述第一驱动组件连接,受所述第一驱动组件驱动,进行俯仰方向的往复运动,以实现脑电极在第一空间上的定位;所述第一空间被定义为在其应用场景中自病患的额头沿头型向后至后脑所形成的轨迹所在的空间;
第二空间运动组件,与所述第一空间运动组件滑动连接;所述第二空间运动组件上安装脑电极;
第二驱动组件,与所述第二空间运动组件连接,驱动所述第二空间运动组件沿所述第一空间运动组件的滑轨滑动,以实现脑电极在第二空间上的定位;所述第二空间被定义为在其应用场景中自病患的左耳沿头型向右至右耳所形成的轨迹所在的空间。
根据本发明一实施例,所述第一空间运动组件包括第一弧形桥架、第二弧形桥架、桥架连接件、桥架固定件;
所述桥架连接件固连所述第一弧形桥架与所述第二弧形桥架,构成桥架组件;
所述桥架组件与所述桥架固定件转动连接;
所述桥架固定件固设于所述底座上。
根据本发明一实施例,所述桥架连接件固定所述第一弧形桥架与所述第二弧形桥架的端部。
根据本发明一实施例,所述第二弧形桥架连接所述第一驱动组件,在所述第一驱动组件的带动下,进行俯仰方向的往复运动。
根据本发明一实施例,所述第一弧形桥架的上表面和/或下表面沿所述第一弧形桥架的圆周方向开设滑轨,滑轨上套设马达座,所述马达座通过球形滚珠在所述滑轨上滑动;
并且所述马达座通过螺钉与所述第一弧形桥架固定,使马达座及球形滚珠与滑轨紧密接触,减小马达座与第一弧形桥架之间的配合间隙。
根据本发明一实施例,所述第一弧形桥架远离所述第二弧形桥架的表面固设弧形齿条,所述马达座内固设往复气动马达,所述往复气动马达与所述弧形齿条啮合,并通过盖板压紧;
所述马达座上固设微动平台,所述微动平台的底部安装脑电极,实现对脑电极定位的微调;
工作时,所述往复气动马达通过与所述弧形齿条的啮合,带动所述马达座沿所述滑轨滑动,从而带动所述微动平台沿滑轨移动。
根据本发明一实施例,所述第一驱动组件包括旋转气动马达、直线轴承、梯形丝杆、梯形螺母、运动基座、导轨轴;
所述梯形丝杆的一端连接所述旋转气动马达的输出轴,所述梯形丝杆的另一端连接所述梯形螺母;
所述直线轴承套设于所述导轨轴上;
所述运动基座固设于所述直线轴承上,并与所述梯形螺母连接;
工作时,所述旋转气动马达驱动所述梯形丝杆进行正、反转动,从而通过梯形螺母带动所述运动基座在所述导轨轴上做直线往复运动。
根据本发明一实施例,所述运动基座上固设连杆连接件,所述连杆连接件通过连杆与所述第一空间运动组件转动连接;
工作时,通过所述运动基座的直线往复运动带动所述第一空间运动组件进行俯仰方向的往复运动。
根据本发明一实施例,所述机器人为适于核磁环境下工作的辅助手术机器人。
根据本发明一实施例,所述机器人的材料为陶瓷、尼龙、聚四氟乙烯、聚甲醛树脂、聚醚醚酮中的任意一种,不会对核磁成像产生影响。
本发明由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
1)本发明一实施例中的XMR影像引导的脑深部电极植入机器人,针对现有的辅助脑电极置入的装置定位精度低的问题,通过第一空间运动组件,与第一驱动组件连接,受第一驱动组件驱动,进行俯仰方向的往复运动,实现脑电极在第一空间上的定位;该第一空间被定义为在其应用场景中自病患的额头沿头型向后至后脑所形成的轨迹所在的空间;第二空间运动组件,与第一空间运动组件滑动连接;在第二空间运动组件上安装脑电极;第二驱动组件,与第二空间运动组件连接,驱动第二空间运动组件沿第一空间运动组件的滑轨滑动,实现脑电极在第二空间上的定位;该第二空间被定义为在其应用场景中自病患的左耳沿头型向右至右耳所形成的轨迹所在的空间。上述机器人利用空间中沿两个相交轴线方向旋转,可以实现工作空间内任意一点的定位,提高脑电极的定位精度。
2)本发明一实施例中的XMR影像引导的脑深部电极植入机器人,利用两个空间相交轴线方向的转动定位,完成机器人主体定位,并配有微动平台进行细微调整,可以进一步提高定位精度。
3)本发明一实施例中的XMR影像引导的脑深部电极植入机器人,弧形桥架在俯仰方向的运动通过梯形丝杆机构进行推动,可以用较小的驱动力完成推动,利用梯形丝杆传动的减速特性提高运动控制精度,并且通过梯形丝杆能够反向自锁的特性保持机构在工作位置的锁定状态。
4)本发明一实施例中的XMR影像引导的脑深部电极植入机器人,弧形桥架圆周方向的转动通过弧形齿条传动,即通过装在马达座内的往复气动马达的齿啮合进行驱动和锁定。
5)本发明一实施例中的XMR影像引导的脑深部电极植入机器人,弧形桥架上、下表面开设滑轨,通过球形滚珠与马达座之间形成滑动连接,利用螺钉挤压球形滚珠消除马达座与弧形桥架之间的间隙,进一步提高定位精度。
附图说明
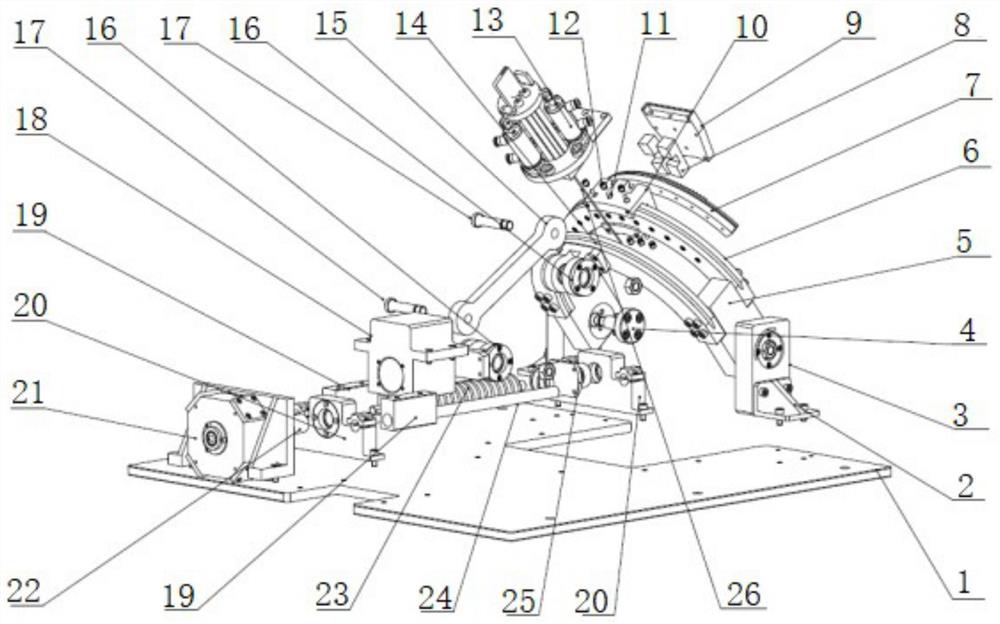
图1为本发明一实施例中的XMR影像引导的脑深部电极植入机器人的结构爆炸图;
图2为本发明一实施例中的XMR影像引导的脑深部电极植入机器人的轴视图;
图3为本发明一实施例中的XMR影像引导的脑深部电极植入机器人的正视图;
图4为本发明一实施例中的XMR影像引导的脑深部电极植入机器人的侧视图;
图5为本发明一实施例中的XMR影像引导的脑深部电极植入机器人的原理图;
图6为本发明一实施例中的XMR影像引导的脑深部电极植入机器人的俯仰方向转动的示意图;
图7为本发明一实施例中的XMR影像引导的脑深部电极植入机器人的沿弧形圆周方向转动的示意图。
附图标记说明:
1:公共基座;2:固定座;3:基座;4:转轴;5:桥架连接件;6:第一弧形桥架;7:弧形齿条;8:往复气动马达;9:盖板;10:马达座;11:球形滚珠;12:螺钉;13:微动平台;14:第二弧形桥架;15:连杆;16:连杆连接座;17:连杆销;18:运动基座;19:直线轴承;20:支撑座;21:旋转气动马达;22:联轴器;23:梯形丝杆;24:导轨轴;25:梯形螺母;26:脑电极。
具体实施方式
以下结合附图和具体实施例对本发明提出的一种XMR影像引导的脑深部电极植入机器人作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。
本实施例提供了一种XMR影像引导的脑深部电极植入机器人,包括:
底座,
第一驱动组件,固定于底座上;
第一空间运动组件,与第一驱动组件连接,受第一驱动组件驱动,进行俯仰方向的往复运动,以实现脑电极在第一空间上的定位;该第一空间被定义为在其应用场景中自病患的额头沿头型向后至后脑所形成的轨迹所在的空间;
第二空间运动组件,与第一空间运动组件滑动连接;该第二空间运动组件上安装脑电极;
第二驱动组件,与第二空间运动组件连接,驱动第二空间运动组件沿第一空间运动组件的滑轨滑动,以实现脑电极在第二空间上的定位;该第二空间被定义为在其应用场景中自病患的左耳沿头型向右至右耳所形成的轨迹所在的空间。
该机器人沿两个空间(第一空间和第二空间)的轴线进行旋转,利用两个空间相交的点进行定位,可以完成对工作空间内任意一点的定位,提高脑电极的定位精度。
具体的,请参看图1,该XMR影像引导的脑深部电极植入机器人的第一空间运动组件包括第一弧形桥架6、第二弧形桥架14、桥架连接件5、桥架固定件,桥架连接件5固连第一弧形桥架6与第二弧形桥架14,构成桥架组件;该桥架组件与桥架固定件转动连接;桥架固定件固设于公共底座1上。
其中,公共基座1的一端开设一第一开口,其第一开口的大小可容置病患的头部。在第一开口的两侧固设桥架固定件,该桥架固定件包括固定座2、基座3,固定座2固设于第一开口的两侧,基座3固设与固定座2上。基座3通过转轴4与桥架连接件5转动连接,使桥架组件可以沿转轴4转动。
该桥架连接件5固定第一弧形桥架6与第二弧形桥架14的端部。
第一弧形桥架6的上表面和/或下表面沿第一弧形桥架6的圆周方向开设滑轨,滑轨上套设马达座10,该马达座10通过球形滚珠11在滑轨上滑动。马达座10为半包结构,其包括上端面、下端面及连接上端面和下端面的侧面。其上端面上开设多个小孔,嵌入球形滚珠11;其下端面亦然。其侧面开设凹槽,用于容置往复气动马达8。
马达座10通过螺钉12与第一弧形桥架11固定,在螺钉12的作用下,挤压马达座10与球形滚珠11,使马达座10及球形滚珠11与滑轨紧密接触,减小马达座与第一弧形桥架之间的配合间隙。同时球形滚珠11在第一弧形桥架6的上、下两条滑轨内形成滚动摩擦,减小马达座10在第一弧形桥架6上滑动的摩擦力,减小往复气动马达8所需的驱动力,使得马达座10的运动更加平稳,提高定位精度。
第一弧形桥架6远离第二弧形桥架14的表面固设弧形齿条7,马达座10内固设往复气动马达8,该往复气动马达8与弧形齿条7啮合,并通过盖板9压紧。
马达座10的上端面固设微动平台13,微动平台13的底部安装脑电极26,实现对脑电极26定位的微调。脑电极26穿过第一弧形桥架6与第二弧形桥架14之间的间隙,指向下方。
工作时,往复气动马达8通过与弧形齿条7的啮合,带动马达座10沿滑轨滑动及锁定,从而带动微动平台13沿滑轨移动,进而调整脑电极26的位置,进一步提高脑电极的定位精度。
第二弧形桥架14连接第一驱动组件,在第一驱动组件的带动下,进行俯仰方向的往复运动。
上述微动平台13、马达座10、球形滚珠11及滑轨构成第二空间运动组件,往复气动马达8、弧形齿条7构成第二驱动组件。
第一驱动组件包括旋转气动马达21、直线轴承19、梯形丝杆23、梯形螺母25、运动基座18、导轨轴24,梯形丝杆23的一端连接旋转气动马达21的输出轴,梯形丝杆23的另一端连接梯形螺母25,直线轴承19套设于导轨轴24上;运动基座18固设于直线轴承19上,并与梯形螺母25连接。
具体的,请参看图1,公共底座1上,相对上述第一开口的一端开设另一开口,即第二开口。该第二开口的大小可容置旋转气动马达21。旋转气动马达21固定于第二开口处。在实际应用中,旋转气动马达21也可直接固设于公共基座1上,不开设开口。
梯形丝杆23的两端通过支撑座20固设与公共基座上,梯形丝杆23可沿其轴线转动。梯形丝杆23的两侧各设置一导轨轴24,导轨轴24的两端固设于支撑座上。两导轨轴24上各套设一直线轴承19,在直线轴承19上固设运动基座18。
梯形丝杆23的一端通过联轴器22与旋转气动马达21的输出轴连接,梯形丝杆23的另一端与梯形螺母25连接。该梯形螺母25与运动基座18固连。
运动基座18上固设连杆连接件,该连杆连接件通过连杆15与第一空间运动组件转动连接。该连杆连接件包括连杆连接座16及连杆销17,连杆15的一端通过连杆销17与固设于运动基座18上连杆连接座16转动连接,连杆15的另一端通过连杆销17与固设于第二弧形桥架14上的连杆连接座16转动连接。
本实施例中的XMR影像引导的脑深部电极植入机器人,着重描述机器人的结构,其结构示意图请参看图2、图3和图4。下面简要介绍一下该机器人的工作原理:
请参看图5,该机器人利用空间中沿两个相交轴线方向转动,可以对工作空间内任意一点定位的原理,通过弧形桥架带动脑电极,实现沿X轴的转动及沿弧形桥架圆周的转动,在工作空间内对脑电极进行定位。另外,通过微动平台对脑电极进行细微调整,进一步提高机器人定位的精度。该微动平台可以是现有的,实现毫米级的微调。
该机器人在工作过程中,请参看图6和图7,该机器人的公共底座01与核磁设备病床连接并固定,旋转气动马达21带动梯形丝杆23进行正、反转动,再通过梯形螺母25带动运动基座18做直线往复运动,并通过连杆15作用进而带动第二弧形桥架14、桥架连接件5、第一弧形桥架6及微动平台13等零部件一起沿转轴4的轴线做俯仰方向的往复转动。
球形滚珠11与马达座10的内在被螺钉12挤压,与第一弧形桥架6的上、下两条滑轨紧密贴合,缩减马达座10与第一弧形桥架6之间的配合间隙,同时球形滚珠11在第一弧形桥架6的上、下两条滑轨内形成滚动摩擦,减小马达座10在第一弧形桥架6上滑动的摩擦力,进而减小往复气动马达8所需的驱动力,使得马达座10的运动更加平稳。
往复气动马达8通过与弧形齿条7的啮合作用,带动马达座10沿第一弧形桥架6的圆周方向进行滑动,进而带动微动平台运动。
通过这两个方向的转动,完成机器人主体定位,再通过微动平台在小范围内高精度的微动调节,进一步提高最终的定位精度,保证脑电极置入位置精确。
本实施例中的XMR影像引导的脑深部电极植入机器人为适于核磁环境下工作的辅助手术机器人。机器人的材料为陶瓷、尼龙、聚四氟乙烯、聚甲醛树脂、聚醚醚酮中的任意一种,不会对核磁成像产生影响。其使用的驱动力可以为液压力和/或气动力,这些都不会影响核磁成像的准确性,从而可以进一步通过XMR实时影像引导技术为机器人提供准确的定位信息。
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。即使对本发明作出各种变化,倘若这些变化属于本发明权利要求及其等同技术的范围之内,则仍落入在本发明的保护范围之中。
- 基于影像和电生理实时定位的脑深部电极自动植入系统
- 基于影像和电生理实时定位的脑深部电极自动植入系统