一种智能林业栽培用土壤挖掘设备
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及林业种植技术领域,尤其涉及一种智能林业栽培用土壤挖掘设备。
背景技术
林业是指保护生态环境保持生态平衡,培育和保护森林以取得木材和其他林产品、利用林木的自然特性以发挥防护作用的生产部门,而林业苗木的栽培移植是林业发展最基础也是最关键的环节。
在林业苗木种植移栽时,为了便于栽培,多需要提前挖好树坑,在挖坑时多是采用钻孔设备进行挖取,现有的挖坑装置在挖掘土壤时往往只是挖出单个固定孔径的孔洞,在面对较为坚硬的土壤环境时,栽培孔洞周围的硬质土壤将会严重影响移栽苗木的成长发育,即使对坑洞周围进行松土,其松土质量及松土效率也不理想。
发明内容
本发明的目的在于提供一种智能林业栽培用土壤挖掘设备,旨在解决上述技术问题。
本发明的目的可以通过以下技术方案实现:
一种智能林业栽培用土壤挖掘设备,包括机架,所述机架上设置有升降机构、挖掘机构以及松土机构,所述升降机构包括升降支撑板以及用于驱动升降支撑板作上下位移的动力组件,所述挖掘机构包括挖掘电机、中心轴以及螺旋叶片,所述挖掘电机输出端与中心轴固定连接,所述螺旋叶片设置在中心轴外侧,所述升降支撑板底部固定设置有安装盘套,所述安装盘套内转动安装有齿盘,所述齿盘与中心轴同轴设置,所述中心轴上固定套接有主动齿轮,所述升降支撑板底部转动安装有从动齿轮,所述主动齿轮与从动齿轮齿接配合,所述从动齿轮与齿盘的内齿槽齿接配合,多个所述松土机构均匀设置在齿盘上并随着齿盘围绕中心轴作同步转动。
所述松土机构包括第一支撑板、调节螺杆、第二支撑板、转动套、转动杆以及松土铲板,所述第一支撑板与齿盘固定连接,所述第二支撑板间隔设置在第一支撑板外侧,所述调节螺杆螺纹贯穿第二支撑板并与第一支撑板转动连接,所述第二支撑板底部两端通过支撑架与转动套固定连接,所述转动杆穿设在两端的转动套之间,所述松土铲板顶端与转动杆固定连接,所述转动杆带动松土铲板转动以调整松土角度,所述松土铲板两侧设置有纵铲刀,所述松土铲板上等间隔设置有若干组横铲组件。
作为本发明进一步的方案:所述转动套内部沿轴线方向依次设置有杆安装孔、转动孔以及定位齿槽孔,且所述杆安装孔、转动孔以及定位齿槽孔的孔径依次递增,所述转动套底部设置有快换通槽,所述快换通槽与杆安装孔、转动孔以及定位齿槽孔相连通,且所述快换通槽的槽宽与杆安装孔的孔径相一致。
作为本发明进一步的方案:所述转动孔的孔深大于定位齿槽孔的孔深。
作为本发明进一步的方案:所述转动杆适配穿插于杆安装孔内,且所述转动杆两端均设置有转动部以及定位齿部,所述转动部适配滑动设置在转动孔内,所述定位齿部适配卡合安装于定位齿槽孔内,所述转动杆的一端螺旋转动连接有挡套,所述挡套抵压在相应的定位齿部外侧。
作为本发明进一步的方案:所述松土铲板上设置有与横铲组件一一对应的横槽,所述横铲组件包括滑杆,所述滑杆两端与横槽固定连接,所述滑杆上滑动安装有一对滑块,两个所述滑块之间设置有挤压弹簧,每个所述滑块两侧均与摆杆的一端转动连接,所述摆杆的另一端与同一侧的摆杆转动配合,每个所述摆杆的外边缘沿长度方向设置有横铲刀。
作为本发明进一步的方案:所述第一支撑板和第二支撑板之间设置有支撑导杆,所述支撑导杆一端与第一支撑板固定连接,所述支撑导杆的另一端滑动贯穿第二支撑板。
作为本发明进一步的方案:所述动力组件包括升降电机、升降丝杠以及导向轴,所述升降电机固定安装于机架上,所述升降电机输出端通过链带与升降丝杠传动连接,所述升降丝杠底部与机架转动配合,所述升降丝杠顶端螺纹贯穿升降支撑板,所述导向轴固定设置在机架上,所述导向轴顶端滑动贯穿升降支撑板。
作为本发明进一步的方案:所述机架底部四角分布设置有移动支撑轮。
本发明的有益效果:
(1)本发明中的中心轴及螺旋叶片在挖掘过程中,利用主动齿轮、从动齿轮及齿盘之间的传动作用,使得均匀分布在齿盘上的多个松土机构实现同步转动,从而能够在挖掘的坑洞周围进行松土作业,使得挖掘的坑洞周围的土壤松散,以满足苗木移栽后的成长与培育;
(2)本发明松土铲板在旋转松土的过程中,纵铲刀破开的硬质土壤将会沿刀刃两侧移动到松土铲板的两侧,此时横铲刀受到土壤挤压力作用,同侧的摆杆将会伸出拱起,从而横铲刀能够对松土铲板两侧的硬质土壤进行横向切割破碎,纵铲刀与横铲刀的横纵切割交叉配合能够有效加大硬质土壤的破碎程度以及破碎速度,从而提高松土质量以及松土效率;
(3)本发明通过设置杆安装孔、转动孔以及定位齿槽孔,利用转动部与转动孔之间以及定位齿部与定位齿槽孔之间的配合,实现了转动杆的安装定位过程、转动以调整松土角度过程以及快速拆卸更换过程,操作简单方便,工作状态切换灵活便捷;
(4)本发明通过设置第一支撑板、第二支撑板以及调节螺杆,通过转动调节螺杆,带动第二支撑板逐渐靠近或远离第一支撑板,实现两者之间间距的调整,也就相当于调节松土机构与中间挖掘机构之间的距离,以根据实际土壤情况实现松土范围的调整。
附图说明
下面结合附图对本发明作进一步的说明。
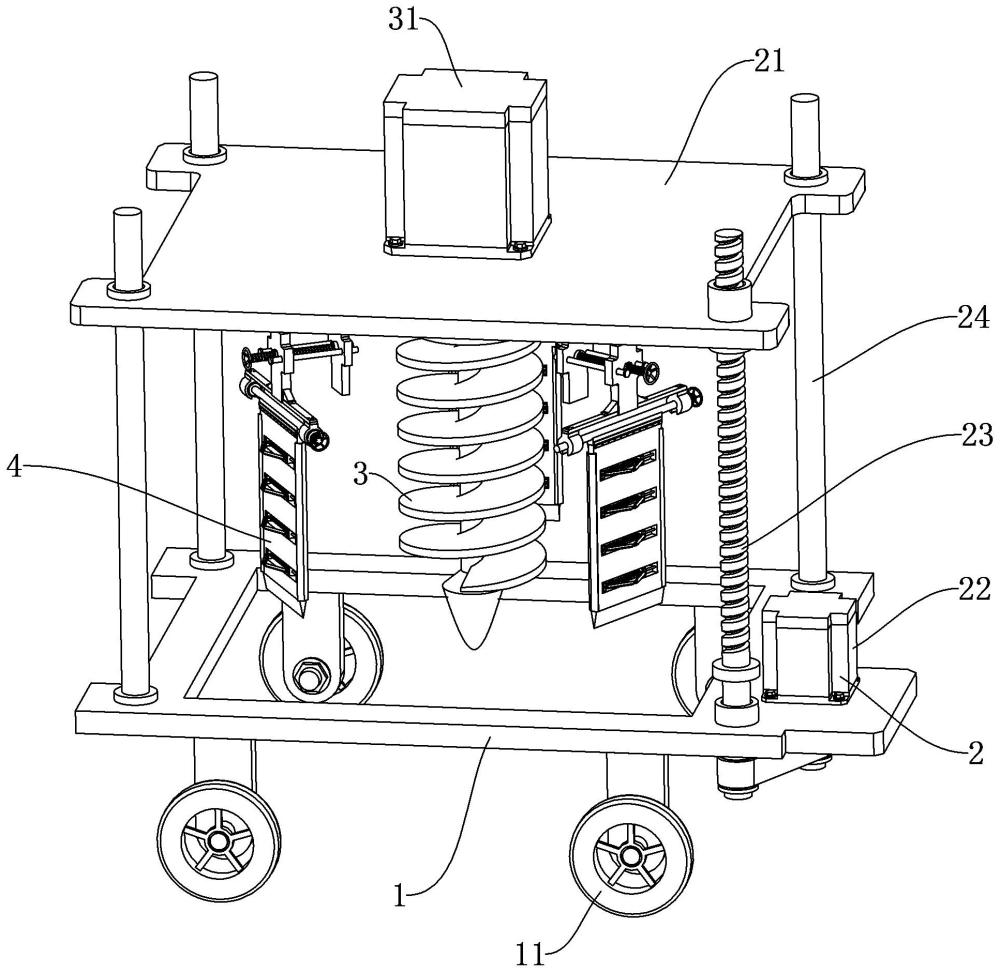
图1是本发明的整体结构示意图;
图2是本发明中挖掘机构的结构示意图;
图3是本发明中松土机构的结构示意图;
图4是本发明中转动套的结构示意图;
图5是本发明中转动套与转动杆的安装示意图;
图6是本发明中松土铲板的结构示意图;
图7是本发明中横铲刀的结构示意图。
图中:1、机架;11、移动支撑轮;2、升降机构;21、升降支撑板;22、升降电机;23、升降丝杠;24、导向轴;3、挖掘机构;31、挖掘电机;32、中心轴;33、螺旋叶片;34、安装盘套;35、齿盘;36、主动齿轮;37、从动齿轮;4、松土机构;41、第一支撑板;42、调节螺杆;43、第二支撑板;44、支撑导杆;45、支撑架;46、转动套;461、杆安装孔;462、转动孔;463、定位齿槽孔;464、快换通槽;47、转动杆;471、转动部;472、定位齿部;473、挡套;48、松土铲板;481、纵铲刀;482、滑杆;483、滑块;484、挤压弹簧;485、摆杆;486、横铲刀。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1和图2所示,本发明为一种智能林业栽培用土壤挖掘设备,包括机架1,机架1上设置有升降机构2、挖掘机构3以及松土机构4,升降机构2包括升降支撑板21以及用于驱动升降支撑板21作上下位移的动力组件,挖掘机构3包括挖掘电机31、中心轴32以及螺旋叶片33,挖掘电机31输出端与中心轴32固定连接,螺旋叶片33设置在中心轴32外侧,升降支撑板21底部固定设置有安装盘套34,安装盘套34内转动安装有齿盘35,齿盘35与中心轴32同轴设置,中心轴32上固定套接有主动齿轮36,升降支撑板21底部转动安装有从动齿轮37,主动齿轮36与从动齿轮37齿接配合,从动齿轮37与齿盘35的内齿槽齿接配合,多个松土机构4均匀设置在齿盘35上并随着齿盘35围绕中心轴32作同步转动。
具体的,为了实现土壤挖掘作业,挖掘电机31将带动中心轴32以及螺旋叶片33转动,配合动力组件驱动升降支撑板21作上下直线位移,使得高速旋转的中心轴32以及螺旋叶片33能够稳定下移实现挖土钻坑,在此过程中,中心轴32转动将带动主动齿轮36旋转,通过从动齿轮37的传动作用,带动齿盘35在安装盘套34内转动,进而带动均匀分布在齿盘35上的多个松土机构4实现同步转动,从而能够在挖掘的坑洞周围进行松土作业。
如图3所示,松土机构4包括第一支撑板41、调节螺杆42、第二支撑板43、转动套46、转动杆47以及松土铲板48,第一支撑板41与齿盘35固定连接,第二支撑板43间隔设置在第一支撑板41外侧,调节螺杆42螺纹贯穿第二支撑板43并与第一支撑板41转动连接,第二支撑板43底部两端通过支撑架45与转动套46固定连接,转动杆47穿设在两端的转动套46之间,松土铲板48顶端与转动杆47固定连接,转动杆47带动松土铲板48转动以调整松土角度,松土铲板48两侧设置有纵铲刀481,松土铲板48上等间隔设置有若干组横铲组件。
具体的,为了实现坑洞周边松土范围的调整,设置第一支撑板41、第二支撑板43以及调节螺杆42,通过转动调节螺杆42,带动第二支撑板43逐渐靠近或远离第一支撑板41,实现两者之间间距的调整,也就相当于调节松土机构4与中间挖掘机构3之间的距离,以根据实际土壤情况实现松土范围的调整。同时,由于苗木在移栽过程中其根系土坯往往为倒锥型结构,为了使得坑洞周围的松土区域与根系土坯相适应,通过转动转动杆47带动松土铲板48向内转动,从而可以调节松土铲板48的松土角度,从而使得坑洞周围翻松后的土壤区域能够与苗木根系土坯形状相匹配,进而使得土壤环境能够适应移栽后苗木的栽培成长需求。
如图4所示,转动套46内部沿轴线方向依次设置有杆安装孔461、转动孔462以及定位齿槽孔463,且杆安装孔461、转动孔462以及定位齿槽孔463的孔径依次递增,转动套46底部设置有快换通槽464,快换通槽464与杆安装孔461、转动孔462以及定位齿槽孔463相连通,且快换通槽464的槽宽与杆安装孔461的孔径相一致。
进一步地,转动孔462的孔深大于定位齿槽孔463的孔深。
如图5所示,转动杆47适配穿插于杆安装孔461内,且转动杆47两端均设置有转动部471以及定位齿部472,转动部471适配滑动设置在转动孔462内,定位齿部472适配卡合安装于定位齿槽孔463内,转动杆47的一端螺旋转动连接有挡套473,挡套473抵压在相应的定位齿部472外侧。
具体的,为了实现转动杆47在转动套46的转动以及快速更换,依次设置杆安装孔461、转动孔462以及定位齿槽孔463,且孔径逐渐增大,在安装时,转动杆47的杆体适配穿插在杆安装孔461内,同时转动部471适配设置在转动孔462内,定位齿部472适配卡合在定位齿槽孔463内,由于快换通槽464的槽宽与杆安装孔461的孔径相一致,此时直径大于快换通槽464的转动部471以及定位齿部472将起到支撑受力的作用,使得转动杆47的两端能够架设在转动套46内,且由于定位齿部472与定位齿槽孔463的卡接配合,配合挡套473抵压在相应的定位齿部472外侧以避免定位齿部472脱出,转动杆47将保持固定不动,以满足转动时的松土作业需求。
而当需要转动转动杆47以调整松土角度时,旋开挡套473解除对定位齿部472的抵压作用,并横向移动转动杆47直到定位齿部472从定位齿槽孔463内脱出,由于转动孔462的孔深大于定位齿槽孔463的孔深,此时转动部471的一部分仍位于转动孔462内,此时转动杆47的转动过程将不再受到齿槽的约束限制,即可转动转动杆47以带动松土铲板48实现角度调节。
而当需要更换拆卸下转动杆47时,横向移动转动杆47直到转动部471从转动孔462内脱出,此时转动杆47的两端将不再受到转动部471以及定位齿部472的支撑作用,转动杆47的杆体将可以自由从转动套46底部的快换通槽464内脱出,从而实现转动杆47及松土铲板48的快速拆卸更换。
如图6所示,松土铲板48上设置有与横铲组件一一对应的横槽,横铲组件包括滑杆482,滑杆482两端与横槽固定连接,滑杆482上滑动安装有一对滑块483,两个滑块483之间设置有挤压弹簧484,每个滑块483两侧均与摆杆485的一端转动连接,摆杆485的另一端与同一侧的摆杆485转动配合,每个摆杆485的外边缘沿长度方向设置有横铲刀486。
具体的,松土铲板48在旋转松土的过程中,纵铲刀481破开的硬质土壤将会沿刀刃两侧移动到松土铲板48的两侧,此时横铲刀486受到土壤挤压力作用,将会带动两个滑块483沿着滑杆482的一端移动并压缩挤压弹簧484,同侧的摆杆485也将会从横槽内伸出拱起,从而横铲刀486能够对松土铲板48两侧的硬质土壤进行横向切割破碎,纵铲刀481与横铲刀486的横纵切割交叉配合能够有效加大硬质土壤的破碎程度以及破碎速度,从而提高松土质量以及松土效率。
需注意的是,由于横铲组件在松土铲板48上纵向排列设置,在松土铲板48不断向下挖掘深入的过程中,每组横铲组件位于不同的土壤深度,即每组横铲刀486所受到的土壤挤压力以及所接触到的土壤硬度也会有所不同,因此利用挤压弹簧484将两个滑块483相连接,每组挤压弹簧484的形变程度能够自适应调整,因此在不同深度对不同硬度的土壤进行破碎切割时,每组横铲刀486向外探出拱起的幅度也有所不同,土壤硬度越大,拱起幅度越大,横铲刀486切割力度越强,从而实现对不同深度及不同硬度土壤的自适应调整切割过程。
如图3所示,第一支撑板41和第二支撑板43之间设置有支撑导杆44,支撑导杆44一端与第一支撑板41固定连接,支撑导杆44的另一端滑动贯穿第二支撑板43。
具体的,在转动调节螺杆42以调整第一支撑板41与第二支撑板43之间的间距时,第二支撑板43在移动调整过程中会沿着支撑导杆44移动,支撑导杆44起到了导向以及支撑的作用,保证了第二支撑板43移动过程中的稳定性。
如图1所示,动力组件包括升降电机22、升降丝杠23以及导向轴24,升降电机22固定安装于机架1上,升降电机22输出端通过链带与升降丝杠23传动连接,升降丝杠23底部与机架1转动配合,升降丝杠23顶端螺纹贯穿升降支撑板21,导向轴24固定设置在机架1上,导向轴24顶端滑动贯穿升降支撑板21。
具体的,升降电机22启动,通过链带带动升降丝杠23转动,使得升降支撑板21沿着导向轴24进行上下移动,从而使得挖掘组件以及松土组件能够逐渐深入或伸出土壤,以满足挖掘及松土作业需求,同时导向轴24保证了升降支撑板21在升降移动过程中的稳定性。
如图1所示,机架1底部四角分布设置有移动支撑轮11。
本发明的工作原理:如图1-图7所示,在使用时,升降电机22启动,通过链带带动升降丝杠23转动,使得升降支撑板21沿着导向轴24进行上下移动,从而使得挖掘组件以及松土组件能够逐渐深入或伸出土壤,以满足挖掘及松土作业需求。在挖掘过程中,挖掘电机31将带动中心轴32以及螺旋叶片33转动,配合动力组件驱动升降支撑板21作上下直线位移,使得高速旋转的中心轴32以及螺旋叶片33能够稳定下移实现挖土钻坑,在此过程中,中心轴32转动将带动主动齿轮36旋转,通过从动齿轮37的传动作用,带动齿盘35在安装盘套34内转动,进而带动均匀分布在齿盘35上的多个松土机构4实现同步转动,从而能够在挖掘的坑洞周围进行松土作业,同时,通过转动调节螺杆42,带动第二支撑板43逐渐靠近或远离第一支撑板41,从而实现坑洞周边松土范围的调整,通过转动转动杆47带动松土铲板48向内转动,从而可以调节松土铲板48的松土角度,并且,松土铲板48在旋转松土的过程中,纵铲刀481破开的硬质土壤将会沿刀刃两侧移动到松土铲板48的两侧,此时横铲刀486受到土壤挤压力作用,将会带动两个滑块483沿着滑杆482的一端移动并压缩挤压弹簧484,同侧的摆杆485也将会从横槽内伸出拱起,从而横铲刀486能够对松土铲板48两侧的硬质土壤进行横向切割破碎,纵铲刀481与横铲刀486的横纵切割交叉配合能够有效加大硬质土壤的破碎程度以及破碎速度,从而提高松土质量以及松土效率。
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
- 一种土壤研磨设备智能化控制系统及其控制方法
- 一种智能移动设备的行走状态检测装置及智能移动设备
- 一种智能设备的学习交互方法及智能设备
- 一种智能设备的功耗优化方法、系统及智能设备
- 一种基于林业工程用土壤挖掘装置
- 一种防止搅拌机构损坏的林业种苗栽培用土壤修复搅拌罐