一种皮革裁剪IO控制方法及系统
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及皮革裁剪控制技术领域,特别涉及一种皮革裁剪IO控制方法及系统。
背景技术
目前,皮革裁剪机在运行时,由于皮革在生产出来是成卷状态且有的材质较硬,大多需要人工进料,人工操作时,固定在机头上的刀具可能会误伤工作人员,安全性较低。另外,皮革裁剪过程中,工作人员可能会不小心将一些杂物(例如:工作牌等)放置在裁剪机台面上,由于刀具的移动速度较快,刀具可能会与杂物碰撞造成刀具损坏。
发明内容
本发明目的之一在于提供了一种皮革裁剪IO控制方法及系统,根据毫米波雷达传感器对裁剪机的台面扫描产生的雷达数据确定是否有物体靠近台面,若有,判断物体与机头之间的距离是否很近,若很近,通过IO卡控制机头上升并关闭裁剪机,防止机头与物体发生碰撞,有效防止工作人员在进行人工操作时,受到刀具的误伤,提升了安全性,也能避免刀具跟物体发生碰撞造成刀具受损,对刀具起到保护作用。
本发明实施例提供的一种皮革裁剪IO控制方法,包括:
控制毫米波雷达传感器对裁剪机的台面进行扫描,产生雷达数据;
根据雷达数据确定是否有物体靠近台面;
若有,根据雷达数据确定物体与机头之间的实时距离;
当实时距离小于等于预设的安全距离阈值时,通过IO卡控制机头上升至预设安全高度并关闭裁剪机。
优选的,根据雷达数据确定是否有物体靠近台面,包括:
解析雷达数据获得轮廓信息;
当轮廓信息中存在与预设的物体标准轮廓数据库中任一物体标准轮廓匹配的目标轮廓时,确定有物体靠近台面。
优选的,根据雷达数据确定物体与机头之间的实时距离,具体包括:
获取机头的位置数据;
根据预设构建规则基于雷达数据和位置数据构建台面模型;
获取台面模型中表示目标轮廓上各特征位置点的特征坐标并输出组合成特征坐标集合;
获取台面模型中表示机头的机头坐标;
计算特征坐标集合中各特征坐标与机头坐标之间的距离;
选取距离的最小值作为实时距离。
优选的,皮革裁剪IO控制方法,还包括:
获取机头的实时移动速度,根据实时移动速度和实时距离确定第一目标警示环,通过第一投射装置在机头的垂直正下方投射出第一目标警示环;
其中,根据实时移动速度和实时距离确定第一目标警示环,具体包括:
根据实时移动速度和实时距离确定第一目标警示环的半径:
其中,r′为确定后的第一目标警示环的半径,r
根据实时移动速度和实时距离确定第一目标警示环的颜色;
其中,根据实时移动速度和实时距离确定第一目标警示环的颜色,具体包括:
当实时移动速度大于等于预设的第一速度警戒值和/或实时距离小于等于预设的第一距离警戒值时,确定第一目标警示环的颜色为预设的第一警戒色;
当实时移动速度小于第一速度警戒值且大于等于预设的第二速度警戒值和/或实时距离大于第一距离警戒值且小于等于预设的第二距离警戒值时,确定第一目标警示环的颜色为预设的第二警戒色;
当实时移动速度小于第二速度警戒值和/或实时距离大于第二距离警戒值时,确定第一目标警示环的颜色为预设的第三警戒色;
获取机头的裁剪路径上裁剪下个图元的入刀点位置;
获取机头的当前位置;
基于裁剪路径确定入刀点位置和当前位置直接的实时轨迹距离;
方法还包括:
获取机头的当前位置,根据裁剪路径确定入刀点位置和当前位置之间的实时轨迹距离确定第二目标警示环,通过第二投射装置在入刀点位置投射出第二目标警示环;
其中,根据裁剪路径确定入刀点位置和当前位置之间的实时轨迹距离确定第二目标警示环,具体包括:
根据实时轨迹距离确定第二目标警示环的半径:
其中,R′为确定后的第二目标警示环的半径,R
根据实时轨迹距离确定第二目标警示环的颜色;
其中,根据实时轨迹距离确定第二目标警示环的颜色,具体包括:
当实时轨迹距离小于等于预设的第一安全距离阈值时,确定第二目标警示环的颜色为预设的第四警戒色;
当实时轨迹距离大于第一安全距离阈值且小于等于预设的第二安全距离阈值时,确定第二目标警示环的颜色为预设的第五警戒色;
当实时轨迹距离大于第二安全距离阈值时,确定第二目标警示环的颜色为预设的第六警戒色。
优选的,皮革裁剪IO控制方法,还包括:
获取预设的历史事故记录数据库中的历史事故记录,历史事故记录包括:多个记录;记录包括:发送事故时机头的移动速度,确定有物体靠近台面时,物体与机头之间的实时距离的变化记录以及安全距离阈值;
当下次确定有物体靠近台面时,根据记录对当前安全距离阈值进行调整;
其中,根据记录对当前安全距离阈值进行调整,具体包括:
根据记录中发送事故时机头的移动速度确定速度验证区间:
[v-g,v+g]
其中,v为移动速度,g为预设的差值阈值;
根据记录中的变化记录确定变化验证曲线;
获取当前机头的移动速度,若其落在速度验证区间内时且当前物体与机头之间的实时距离的变化记录制成的目标曲线与变化验证曲线的相似度大于等于预设的相似度阈值时,采用以下预设的方法对当前安全距离阈值进行调整:
其中,f′为调整后的安全距离阈值,f
本发明实施例提供的一种皮革裁剪IO控制系统,包括:
第一控制模块,用于控制毫米波雷达传感器对裁剪机的台面进行扫描,产生雷达数据;
第一确定模块,用于根据雷达数据确定是否有物体靠近台面;
第二确定模块,用于若有,根据雷达数据确定物体与机头之间的实时距离;
第二控制模块,用于当实时距离小于等于预设的安全距离阈值时,通过IO卡控制机头上升至预设安全高度并关闭裁剪机。
优选的,第一确定模块执行包括如下操作:
解析雷达数据获得轮廓信息;
当轮廓信息中存在与预设的物体标准轮廓数据库中任一物体标准轮廓匹配的目标轮廓时,确定有物体靠近台面。
优选的,第二确定模块执行包括如下操作:
获取机头的位置数据;
根据预设构建规则基于雷达数据和位置数据构建台面模型;
获取台面模型中表示目标轮廓上各特征位置点的特征坐标并输出组合成特征坐标集合;
获取台面模型中表示机头的机头坐标;
计算特征坐标集合中各特征坐标与机头坐标之间的距离;
选取距离的最小值作为实时距离。
优选的,皮革裁剪IO控制系统,还包括:
警示环投射模块,用于通过第一投射装置和第二投射装置在台面上投射对应的警示环;
警示环投射模块执行包括如下操作:
获取机头的实时移动速度,根据实时移动速度和实时距离确定第一目标警示环,通过第一投射装置在机头的垂直正下方投射出第一目标警示环;
其中,根据实时移动速度和实时距离确定第一目标警示环,具体包括:
根据实时移动速度和实时距离确定第一目标警示环的半径:
其中,r′为确定后的第一目标警示环的半径,r
根据实时移动速度和实时距离确定第一目标警示环的颜色;
其中,根据实时移动速度和实时距离确定第一目标警示环的颜色,具体包括:
当实时移动速度大于等于预设的第一速度警戒值和/或实时距离小于等于预设的第一距离警戒值时,确定第一目标警示环的颜色为预设的第一警戒色;
当实时移动速度小于第一速度警戒值且大于等于预设的第二速度警戒值和/或实时距离大于第一距离警戒值且小于等于预设的第二距离警戒值时,确定第一目标警示环的颜色为预设的第二警戒色;
当实时移动速度小于第二速度警戒值和/或实时距离大于第二距离警戒值时,确定第一目标警示环的颜色为预设的第三警戒色;
获取机头的裁剪路径上裁剪下个图元的入刀点位置;
获取机头的当前位置;
基于裁剪路径确定入刀点位置和当前位置直接的实时轨迹距离;
警示环投射模块执行还包括如下操作:
获取机头的当前位置,根据裁剪路径确定入刀点位置和当前位置之间的实时轨迹距离确定第二目标警示环,通过第二投射装置在入刀点位置投射出第二目标警示环;
其中,根据裁剪路径确定入刀点位置和当前位置之间的实时轨迹距离确定第二目标警示环,具体包括:
根据实时轨迹距离确定第二目标警示环的半径:
其中,R′为确定后的第二目标警示环的半径,R
根据实时轨迹距离确定第二目标警示环的颜色;
其中,根据实时轨迹距离确定第二目标警示环的颜色,具体包括:
当实时轨迹距离小于等于预设的第一安全距离阈值时,确定第二目标警示环的颜色为预设的第四警戒色;
当实时轨迹距离大于第一安全距离阈值且小于等于预设的第二安全距离阈值时,确定第二目标警示环的颜色为预设的第五警戒色;
当实时轨迹距离大于第二安全距离阈值时,确定第二目标警示环的颜色为预设的第六警戒色。
优选的,皮革裁剪IO控制系统,还包括:
调整模块,用于根据历史事故记录对当前的安全距离阈值进行自适应调整;
调整模块执行包括如下操作:
获取预设的历史事故记录数据库中的历史事故记录,历史事故记录包括:多个记录;记录包括:发送事故时机头的移动速度,确定有物体靠近台面时,物体与机头之间的实时距离的变化记录以及安全距离阈值;
当下次确定有物体靠近台面时,根据记录对当前安全距离阈值进行调整;
其中,根据记录对当前安全距离阈值进行调整,具体包括:
根据记录中发送事故时机头的移动速度确定速度验证区间:
[v-g,v+g]
其中,v为移动速度,g为预设的差值阈值;
根据记录中的变化记录确定变化验证曲线;
获取当前机头的移动速度,若其落在速度验证区间内时且当前物体与机头之间的实时距离的变化记录制成的目标曲线与变化验证曲线的相似度大于等于预设的相似度阈值时,采用以下预设的方法对当前安全距离阈值进行调整:
其中,f′为调整后的安全距离阈值,f
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
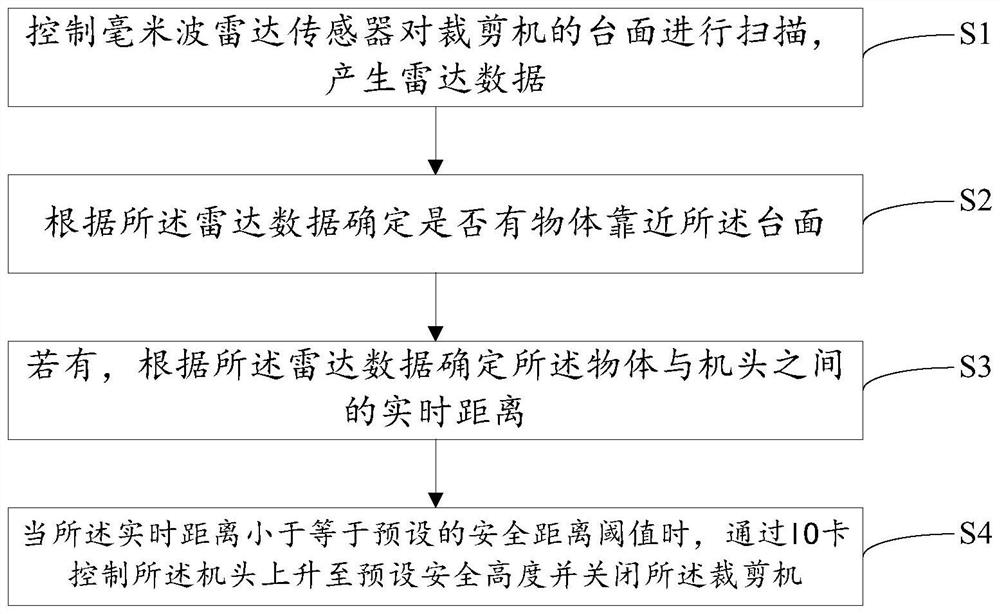
图1为本发明实施例中一种皮革裁剪IO控制方法的流程图;
图2为本发明实施例中一种皮革裁剪IO控制系统的示意图。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
本发明实施例提供了一种皮革裁剪IO控制方法,如图1所示,包括:
S1、控制毫米波雷达传感器对裁剪机的台面进行扫描,产生雷达数据;
S2、根据雷达数据确定是否有物体靠近台面;
S3、若有,根据雷达数据确定物体与机头之间的实时距离;
S4、当实时距离小于等于预设的安全距离阈值时,通过IO卡控制机头上升至预设安全高度并关闭裁剪机。
上述技术方案的工作原理为:
控制毫米波雷达传感器对裁剪机的台面进行扫描,产生雷达数据(即其向台面发射信号,各发射信号在台面上或台面上的物体反射回来的反射信号);根据雷达数据确定是否有物体(例如:手掌、手臂、工作牌等)靠近台面,若有,确定物体与机头之间的实时距离,当实时距离小于等于预设的安全距离阈值(例如:15cm)时,说明机头距离物体非常近,刀具可能会与物体发生接触,需通过IO卡控制机头上升至预设安全高度(例如:30cm)并关闭裁剪机;皮革裁剪中,一般通过IO卡控制刀具的上下行程;毫米波雷达传感器设置在裁剪机正上方至少0.5m处。
上述技术方案的有益效果为:本发明实施例根据毫米波雷达传感器对裁剪机的台面扫描产生的雷达数据确定是否有物体靠近台面,若有,判断物体与机头之间的距离是否很近,若很近,通过IO卡控制机头上升并关闭裁剪机,防止机头与物体发生碰撞,有效防止工作人员在进行人工操作时,受到刀具的误伤,提升了安全性,也能避免刀具跟物体发生碰撞造成刀具受损,对刀具起到保护作用。
本发明实施例提供了一种皮革裁剪IO控制方法,根据雷达数据确定是否有物体靠近台面,包括:
解析雷达数据获得轮廓信息;
当轮廓信息中存在与预设的物体标准轮廓数据库中任一物体标准轮廓匹配的目标轮廓时,确定有物体靠近台面。
上述技术方案的工作原理为:
解析毫米波雷达传感器对裁剪机台面进行扫描产生的雷达数据确定轮廓信息,该技术为现有技术,不作赘述;预设的物体标准轮廓数据库中预存有多个物体标准轮廓(即根据大量实验测得的多个物体例如:手指、手掌、手臂、头部、工作牌、钥匙、戒指、耳环等的轮廓);当轮廓信息中存在与物体标准轮廓数据库中任一物体标准轮廓匹配的目标轮廓时,说明有物体靠近台面。
上述技术方案的有益效果为:本发明实施例根据毫米波雷达传感器对裁剪机台面进行扫描产生的雷达数据确定轮廓信息,当轮廓信息中存在与物体标准轮廓数据库中任一物体标准轮廓匹配的目标轮廓时,说明有物体靠近台面,十分智能化。
本发明实施例提供了一种皮革裁剪IO控制方法,根据雷达数据确定物体与机头之间的实时距离,具体包括:
获取机头的位置数据;
根据预设构建规则基于雷达数据和位置数据构建台面模型;
获取台面模型中表示目标轮廓上各特征位置点的特征坐标并输出组合成特征坐标集合;
获取台面模型中表示机头的机头坐标;
计算特征坐标集合中各特征坐标与机头坐标之间的距离;
选取距离的最小值作为实时距离。
上述技术方案的工作原理为:
预设的构建规则具体为:以毫米波雷达传感器的所在位置为中心建立三维坐标系;毫米波雷达传感器对台面进行扫描产生的雷达数据中有各个轮廓的相对位置信息,根据该相对位置信息将各轮廓在三维坐标系中表示,根据机头的位置数据将机头在三维坐标系中表示获得台面模型;获取台面模型中表示目标轮廓(即物体轮廓)上各特征位置点(在物体轮廓上各个方向上每隔预设的距离间隔例如:0.2cm选取一个点作为特征位置点)并输出组合成特征坐标集合;选取特征坐标集合中与机头坐标之间距离的最小值作为实时距离;计算三维坐标间的距离为现有技术,不作赘述。
上述技术方案的有益效果为:本发明实施例通过构建台面模型,根据台面模型确定特征坐标集合和机头坐标,选取特征坐标集合中与机头坐标之间距离的最小值作为实时距离即选取物体上离机头最近的距离作为实时距离,提升了合理性。
本发明实施例提供了一种皮革裁剪IO控制方法,还包括:
获取机头的实时移动速度,根据实时移动速度和实时距离确定第一目标警示环,通过第一投射装置在机头的垂直正下方投射出第一目标警示环;
其中,根据实时移动速度和实时距离确定第一目标警示环,具体包括:
根据实时移动速度和实时距离确定第一目标警示环的半径:
其中,r′为确定后的第一目标警示环的半径,r
根据实时移动速度和实时距离确定第一目标警示环的颜色;
其中,根据实时移动速度和实时距离确定第一目标警示环的颜色,具体包括:
当实时移动速度大于等于预设的第一速度警戒值和/或实时距离小于等于预设的第一距离警戒值时,确定第一目标警示环的颜色为预设的第一警戒色;
当实时移动速度小于第一速度警戒值且大于等于预设的第二速度警戒值和/或实时距离大于第一距离警戒值且小于等于预设的第二距离警戒值时,确定第一目标警示环的颜色为预设的第二警戒色;
当实时移动速度小于第二速度警戒值和/或实时距离大于第二距离警戒值时,确定第一目标警示环的颜色为预设的第三警戒色;
获取机头的裁剪路径上裁剪下个图元的入刀点位置;
获取机头的当前位置;
基于裁剪路径确定入刀点位置和当前位置直接的实时轨迹距离;
方法还包括:
获取机头的当前位置,根据裁剪路径确定入刀点位置和当前位置之间的实时轨迹距离确定第二目标警示环,通过第二投射装置在入刀点位置投射出第二目标警示环;
其中,根据裁剪路径确定入刀点位置和当前位置之间的实时轨迹距离确定第二目标警示环,具体包括:
根据实时轨迹距离确定第二目标警示环的半径:
其中,R′为确定后的第二目标警示环的半径,R
根据实时轨迹距离确定第二目标警示环的颜色;
其中,根据实时轨迹距离确定第二目标警示环的颜色,具体包括:
当实时轨迹距离小于等于预设的第一安全距离阈值时,确定第二目标警示环的颜色为预设的第四警戒色;
当实时轨迹距离大于第一安全距离阈值且小于等于预设的第二安全距离阈值时,确定第二目标警示环的颜色为预设的第五警戒色;
当实时轨迹距离大于第二安全距离阈值时,确定第二目标警示环的颜色为预设的第六警戒色。
上述技术方案的工作原理为:
第一投射装置(投射灯、投影仪等)设置在机头处;第二投射装置(投射灯、投影仪等)设置在台面正上方至少1.2米;第一目标警示环的初始半径为15cm,根据机头的实时移动速度和物体与机头之间的实时距离确定第一目标警示环的半径和颜色;例如:当机头速度越大或物体与机头之间的实时距离越小时,其越具危险性,就要将光环的半径调大,颜色调的越醒目,提醒用户;预设的第一警戒色可以为大红色;预设的第二警戒色可以为黄色;预设的第三警戒色可以为蓝色;当机头正在裁剪一个图元时,其很快就会裁剪下一个图元,因此,还需提示用户机头即将进入裁剪的下一个图元;一般情况下,机头裁剪完一个图元时,抬刀,移动到下一个图元的入刀点,入刀;因此,在机头的裁剪路径上裁剪下个图元的入刀点位置投射第二目标警示环;根据裁剪路径确定机头到下个入刀点之间的路程(即实时轨迹距离);第二目标警示环的初始半径为18cm,根据实时轨迹距离调整第二目标警示环的颜色和半径;例如:当实时轨迹距离越小时,说明刀具很快到达该入刀点,警示环的半径就要越大,提示用户;预设的第四警戒色可以为荧光绿;预设的第五警戒色可以为橘黄色;预设的第六警戒色可以为灰色。
上述技术方案的有益效果为:本发明实施例根据机头的实时移动速度以及物体与机头之间的实时距离确定第一目标警示环并通过第一投射装置投射至机头垂直正下方,合理化地动态调整警示环的半径和颜色,跟踪机头投射,提示用户别靠近,会有危险,同时,根据实时轨迹距离确定第二目标警示环并通过第二投射装置投射至机头即将采集的下一个图元的入刀点,提示用户机头即将进入的位置,大大增强的裁剪机运行的安全性,两个目标警示环会动态调整,更醒目,提醒效果更佳,具有很强的适用性。
本发明实施例提供了一种皮革裁剪IO控制方法,还包括:
获取预设的历史事故记录数据库中的历史事故记录,历史事故记录包括:多个记录;记录包括:发送事故时机头的移动速度,确定有物体靠近台面时,物体与机头之间的实时距离的变化记录以及安全距离阈值;
当下次确定有物体靠近台面时,根据记录对当前安全距离阈值进行调整;
其中,根据记录对当前安全距离阈值进行调整,具体包括:
根据记录中发送事故时机头的移动速度确定速度验证区间:
[v-g,v+g]
其中,v为移动速度,g为预设的差值阈值;
根据记录中的变化记录确定变化验证曲线;
获取当前机头的移动速度,若其落在速度验证区间内时且当前物体与机头之间的实时距离的变化记录制成的目标曲线与变化验证曲线的相似度大于等于预设的相似度阈值时,采用以下预设的方法对当前安全距离阈值进行调整:
其中,f′为调整后的安全距离阈值,f
上述技术方案的工作原理为:
预设的历史事故记录数据库中记录有发生事故(机头与不明物体发生碰撞或即将碰撞等,即当物体与机头之间的实时距离小于0至3cm时)时机头的移动速度,物体与机头之间实时距离的变化记录(例如:一组实时距离有35.1cm,34cm,19cm等),此时的安全距离阈值(例如:30cm);该记录可以说明机头处于该速度下运行时,物体与机头之间的实时距离的变化处于该种情况时,安全距离阈值设置为该值时,发生事故;但是由于,事故发生的次数不会很多(例如:1个季度15次左右),因此,在下次确定有物体靠近台面时,不可以拿记录来直接匹配,判断是否会有事故发生,因此,可以根据任一记录制定验证区间,变化验证曲线,当新确定有物体靠近台面时,获取的机头的移动速度落在验证区间内且目标曲线与变换验证曲线相似度大于等于预设的相似度阈值时,立即扩大安全距离阈值(即提前升起机头)。
上述技术方案的有益效果为:本发明实施例建立历史事故记录数据库,用于记录系统无法成功避免机头与物体发生碰撞的记录,对记录进行学习后对接下来的裁剪进行判断,若条件满足,扩大安全距离阈值,防止再有相似情况的发生,极大程度上提升了系统运行的稳定性,对自身的错误进行学习不断改进,十分智能化。
本发明实施例提供了一种皮革裁剪IO控制系统,如图2所示,包括:
第一控制模块1,用于控制毫米波雷达传感器对裁剪机的台面进行扫描,产生雷达数据;
第一确定模块2,用于根据雷达数据确定是否有物体靠近台面;
第二确定模块3,用于若有,根据雷达数据确定物体与机头之间的实时距离;
第二控制模块4,用于当实时距离小于等于预设的安全距离阈值时,通过IO卡控制机头上升至预设安全高度并关闭裁剪机。
上述技术方案的工作原理为:
控制毫米波雷达传感器对裁剪机的台面进行扫描,产生雷达数据(即其向台面发射信号,各发射信号在台面上或台面上的物体反射回来的反射信号);根据雷达数据确定是否有物体(例如:手掌、手臂、工作牌等)靠近台面,若有,确定物体与机头之间的实时距离,当实时距离小于等于预设的安全距离阈值(例如:15cm)时,说明机头距离物体非常近,刀具可能会与物体发生接触,需通过IO卡控制机头上升至预设安全高度(例如:30cm)并关闭裁剪机;皮革裁剪中,一般通过IO卡控制刀具的上下行程;毫米波雷达传感器设置在裁剪机正上方至少0.5m处。
上述技术方案的有益效果为:本发明实施例根据毫米波雷达传感器对裁剪机的台面扫描产生的雷达数据确定是否有物体靠近台面,若有,判断物体与机头之间的距离是否很近,若很近,通过IO卡控制机头上升并关闭裁剪机,防止机头与物体发生碰撞,有效防止工作人员在进行人工操作时,受到刀具的误伤,提升了安全性,也能避免刀具跟物体发生碰撞造成刀具受损,对刀具起到保护作用。
本发明实施例提供了一种皮革裁剪IO控制系统,第一确定模块2执行包括如下操作:
解析雷达数据获得轮廓信息;
当轮廓信息中存在与预设的物体标准轮廓数据库中任一物体标准轮廓匹配的目标轮廓时,确定有物体靠近台面。
上述技术方案的工作原理为:
解析毫米波雷达传感器对裁剪机台面进行扫描产生的雷达数据确定轮廓信息,该技术为现有技术,不作赘述;预设的物体标准轮廓数据库中预存有多个物体标准轮廓(即根据大量实验测得的多个物体例如:手指、手掌、手臂、头部、工作牌、钥匙、戒指、耳环等的轮廓);当轮廓信息中存在与物体标准轮廓数据库中任一物体标准轮廓匹配的目标轮廓时,说明有物体靠近台面。
上述技术方案的有益效果为:本发明实施例根据毫米波雷达传感器对裁剪机台面进行扫描产生的雷达数据确定轮廓信息,当轮廓信息中存在与物体标准轮廓数据库中任一物体标准轮廓匹配的目标轮廓时,说明有物体靠近台面,十分智能化。
本发明实施例提供了一种皮革裁剪IO控制系统,第二确定模块3执行包括如下操作:
获取机头的位置数据;
根据预设构建规则基于雷达数据和位置数据构建台面模型;
获取台面模型中表示目标轮廓上各特征位置点的特征坐标并输出组合成特征坐标集合;
获取台面模型中表示机头的机头坐标;
计算特征坐标集合中各特征坐标与机头坐标之间的距离;
选取距离的最小值作为实时距离。
上述技术方案的工作原理为:
预设的构建规则具体为:以毫米波雷达传感器的所在位置为中心建立三维坐标系;毫米波雷达传感器对台面进行扫描产生的雷达数据中有各个轮廓的相对位置信息,根据该相对位置信息将各轮廓在三维坐标系中表示,根据机头的位置数据将机头在三维坐标系中表示获得台面模型;获取台面模型中表示目标轮廓(即物体轮廓)上各特征位置点(在物体轮廓上各个方向上每隔预设的距离间隔例如:0.2cm选取一个点作为特征位置点)并输出组合成特征坐标集合;选取特征坐标集合中与机头坐标之间距离的最小值作为实时距离;计算三维坐标间的距离为现有技术,不作赘述。
上述技术方案的有益效果为:本发明实施例通过构建台面模型,根据台面模型确定特征坐标集合和机头坐标,选取特征坐标集合中与机头坐标之间距离的最小值作为实时距离即选取物体上离机头最近的距离作为实时距离,提升了合理性。
本发明实施例提供了一种皮革裁剪IO控制系统,还包括:
警示环投射模块,用于通过第一投射装置和第二投射装置在台面上投射对应的警示环;
警示环投射模块执行包括如下操作:
获取机头的实时移动速度,根据实时移动速度和实时距离确定第一目标警示环,通过第一投射装置在机头的垂直正下方投射出第一目标警示环;
其中,根据实时移动速度和实时距离确定第一目标警示环,具体包括:
根据实时移动速度和实时距离确定第一目标警示环的半径:
其中,r′为确定后的第一目标警示环的半径,r
根据实时移动速度和实时距离确定第一目标警示环的颜色;
其中,根据实时移动速度和实时距离确定第一目标警示环的颜色,具体包括:
当实时移动速度大于等于预设的第一速度警戒值和/或实时距离小于等于预设的第一距离警戒值时,确定第一目标警示环的颜色为预设的第一警戒色;
当实时移动速度小于第一速度警戒值且大于等于预设的第二速度警戒值和/或实时距离大于第一距离警戒值且小于等于预设的第二距离警戒值时,确定第一目标警示环的颜色为预设的第二警戒色;
当实时移动速度小于第二速度警戒值和/或实时距离大于第二距离警戒值时,确定第一目标警示环的颜色为预设的第三警戒色;
获取机头的裁剪路径上裁剪下个图元的入刀点位置;
获取机头的当前位置;
基于裁剪路径确定入刀点位置和当前位置直接的实时轨迹距离;
警示环投射模块执行包括如下操作:
获取机头的当前位置,根据裁剪路径确定入刀点位置和当前位置之间的实时轨迹距离确定第二目标警示环,通过第二投射装置在入刀点位置投射出第二目标警示环;
其中,根据裁剪路径确定入刀点位置和当前位置之间的实时轨迹距离确定第二目标警示环,具体包括:
根据实时轨迹距离确定第二目标警示环的半径:
其中,R′为确定后的第二目标警示环的半径,R
根据实时轨迹距离确定第二目标警示环的颜色;
其中,根据实时轨迹距离确定第二目标警示环的颜色,具体包括:
当实时轨迹距离小于等于预设的第一安全距离阈值时,确定第二目标警示环的颜色为预设的第四警戒色;
当实时轨迹距离大于第一安全距离阈值且小于等于预设的第二安全距离阈值时,确定第二目标警示环的颜色为预设的第五警戒色;
当实时轨迹距离大于第二安全距离阈值时,确定第二目标警示环的颜色为预设的第六警戒色。
上述技术方案的工作原理为:
第一投射装置(投射灯、投影仪等)设置在机头处;第二投射装置(投射灯、投影仪等)设置在台面正上方至少1.2米;第一目标警示环的初始半径为15cm,根据机头的实时移动速度和物体与机头之间的实时距离确定第一目标警示环的半径和颜色;例如:当机头速度越大或物体与机头之间的实时距离越小时,其越具危险性,就要将光环的半径调大,颜色调的越醒目,提醒用户;预设的第一警戒色可以为大红色;预设的第二警戒色可以为黄色;预设的第三警戒色可以为蓝色;当机头正在裁剪一个图元时,其很快就会裁剪下一个图元,因此,还需提示用户机头即将进入裁剪的下一个图元;一般情况下,机头裁剪完一个图元时,抬刀,移动到下一个图元的入刀点,入刀;因此,在机头的裁剪路径上裁剪下个图元的入刀点位置投射第二目标警示环;根据裁剪路径确定机头到下个入刀点之间的路程(即实时轨迹距离);第二目标警示环的初始半径为18cm,根据实时轨迹距离调整第二目标警示环的颜色和半径;例如:当实时轨迹距离越小时,说明刀具很快到达该入刀点,警示环的半径就要越大,提示用户;预设的第四警戒色可以为荧光绿;预设的第五警戒色可以为橘黄色;预设的第六警戒色可以为灰色。
上述技术方案的有益效果为:本发明实施例根据机头的实时移动速度以及物体与机头之间的实时距离确定第一目标警示环并通过第一投射装置投射至机头垂直正下方,合理化地动态调整警示环的半径和颜色,跟踪机头投射,提示用户别靠近,会有危险,同时,根据实时轨迹距离确定第二目标警示环并通过第二投射装置投射至机头即将采集的下一个图元的入刀点,提示用户机头即将进入的位置,大大增强的裁剪机运行的安全性,两个目标警示环会动态调整,更醒目,提醒效果更佳,具有很强的适用性。
本发明实施例提供了一种皮革裁剪IO控制系统,还包括:
调整模块,用于根据历史事故记录对当前的安全距离阈值进行自适应调整;
调整模块执行包括如下操作:
获取预设的历史事故记录数据库中的历史事故记录,历史事故记录包括:多个记录;记录包括:发送事故时机头的移动速度,确定有物体靠近台面时,物体与机头之间的实时距离的变化记录以及安全距离阈值;
当下次确定有物体靠近台面时,根据记录对当前安全距离阈值进行调整;
其中,根据记录对当前安全距离阈值进行调整,具体包括:
根据记录中发送事故时机头的移动速度确定速度验证区间:
[v-g,v+g]
其中,v为移动速度,g为预设的差值阈值;
根据记录中的变化记录确定变化验证曲线;
获取当前机头的移动速度,若其落在速度验证区间内时且当前物体与机头之间的实时距离的变化记录制成的目标曲线与变化验证曲线的相似度大于等于预设的相似度阈值时,采用以下预设的方法对当前安全距离阈值进行调整:
其中,f′为调整后的安全距离阈值,f
上述技术方案的工作原理为:
预设的历史事故记录数据库中记录有发生事故(机头与不明物体发生碰撞或即将碰撞等,即当物体与机头之间的实时距离小于0至3cm时)时机头的移动速度,物体与机头之间实时距离的变化记录(例如:一组实时距离有35.1cm,34cm,19cm等),此时的安全距离阈值(例如:30cm);该记录可以说明机头处于该速度下运行时,物体与机头之间的实时距离的变化处于该种情况时,安全距离阈值设置为该值时,发生事故;但是由于,事故发生的次数不会很多(例如:1个季度15次左右),因此,在下次确定有物体靠近台面时,不可以拿记录来直接匹配,判断是否会有事故发生,因此,可以根据任一记录制定验证区间,变化验证曲线,当新确定有物体靠近台面时,获取的机头的移动速度落在验证区间内且目标曲线与变换验证曲线相似度大于等于预设的相似度阈值时,立即扩大安全距离阈值(即提前升起机头)。
上述技术方案的有益效果为:本发明实施例建立历史事故记录数据库,用于记录系统无法成功避免机头与物体发生碰撞的记录,对记录进行学习后对接下来的裁剪进行判断,若条件满足,扩大安全距离阈值,防止再有相似情况的发生,极大程度上提升了系统运行的稳定性,对自身的错误进行学习不断改进,十分智能化。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。