基于深度学习的移动机器人路径规划方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及工业机器人技术领域,尤其涉及一种基于深度学习的移动机器人路径规划方法。
背景技术
目前,自动化技术快速发展,该领域中的机器人系统是由机器人和周边设备与工具组成的自动化作业系统,机器人特别是工业机器人一般是多轴机械臂,其轴主要由齿轮箱和伺服电机组成,还包括许多独立地移动和转动的部件,机器人控制系统主要由主控制器和伺服驱动控制器组成。
目前,国内外领先的机器人控制系统,特别是工业机器人控制系统正朝向控制精度进一步提高,安全性更好、输入输出更方便等方向发展。要实现机器人完成指定作业动作的目的,就需要给机器人建立如何运动的作业。传统的方式是通过示教盒,在示教模式下,控制每个关节运动,不断的记录作业点。在记录整个作业的多个作业点之后,可以设定作业点之间的运动类型,运动速度等等。当下研发的手把手示教技术越来越普及,其原理是在机器人末端加上力传感器,当开启手把手示教功能时,工作人员用手去拉动机器人末端,力传感器采集到数据之后发送给机器人控制器,控制器计算拉力矢量的方向和大小,驱动机器人运动,使得机器人末端向拉力方向运动(包括旋转),即跟随工作人员的手运动。在此过程中,控制器记录整个运动路径,在完成示教后,控制器记录的路径就是示教作业。
在执行示教作业时,通常有两种方式:一种是手把手示教的再现,即控制器将记录
路径的点之间时间间隔加大或减小之后当做执行作业发出。当时间间隔没变时,机器人执行的作业即是手把手示教时动作完全再现,间隔加大或减小之后即是手把手示教时动作的“慢放”或“快放”;另一种是示教作业的路径不变,但是在整个路径中的速度重新规划,不再参考示教时手何时拉动的快,何时拉动的慢。在一些特殊应用环境下,比如焊接,物料填充等,都需要机器人末端匀速,以保证作业效果,这种特殊应用下的手把手示教作业需要按第二种方式执行,即对整个路径中的速度重新规划。
在第二种执行方式中,需要重新规划作业点之间的运动类型和运动速度。一种简单的方式是选取路径中特征明显的点,例如拐点,利用这些点规划一条路径。这种方法会舍弃很多已经采集的路径点,对路径的还原也有影响。另一种方式是利用采集的路径点算出路径曲线,再根据期望的速度去计算新的作业点,再反解为关节值。这种方法的缺点是计算量太大,影响工作效率。
发明内容
本发明针对现有重新规划作业点技术实现复杂,计算量太大,影响工作效率等问题,提供了一种基于深度学习的移动机器人路径规划方法及系统,解决现有的重新规划作业点技术实现复杂,计算量太大,通信时间长,且影响工作效率等问题。
一方面,本发明提供一种基于深度学习的移动机器人路径规划方法,包括总控制器计算第一待作业点的移动时间戳;
如果所述移动时间戳大于第一特定时间值,且小于第二特定时间值,则所述总控制器控制与所述第一待作业点对应的驱动器驱动一电机轴进行动作;所述第二特定时间值大于所述第一特定时间值;
如果所述移动时间戳小于所述第一特定时间值,则所述总控制器控制与所述第一待作业点对应的所述驱动器维持原工作状态;
如果所述移动时间戳大于所述第二特定时间值,则所述总控制器控制与所述第一待作业点对应的驱动器在所述第一待作业点之后插补N个第二待作业点,以把所述N个第二待作业点作为下一路径规划过程中的所述第一待作业点,以重新规划所述机器人的作业运动路径,其中所述N为大于零的整数。
作为一种可选的实施方式,所述总控制器计算第一待作业点的移动时间戳,包括:
通过传感器进行检测,记录采样示教过程中的M个所述第一待作业点的空间位置点;其中,所述M为大于零的整数;
计算相邻作业时间对应的两个所述第一待作业点之间的位置间距;
获得设定的单位时间内的期望速度;
根据所述位置间距和所述期望速度获得所述移动时间戳。
另一方面,本发明还提供一种机器人作业运动路径规划系统,包括:
总控制器,用于计算第一待作业点的移动时间戳;
所述总控制器,还用于判断所述移动时间戳是否在所述第一特定时间值至所述第
二特定时间值范围内;如果所述移动时间戳大于所述第一特定时间值,且小于所述第二特定时间值,则所述总控制器还用于控制与用于控制与所述第一待作业点对应的驱动器驱动一电机轴进行动作;
所述驱动器,用于受所述控制器的控制,驱动一电机轴进行动作;
如果所述移动时间戳小于所述第一特定时间值,所述总控制器还用于控制与所述第一待作业点对应的所述驱动器维持原工作状态;
所述移动时间戳大于所述第二特定时间值,所述控制器,还用于控制与所述第一待作业点对应的所述驱动器在所述第一待作业点之后插补N个第二待作业点,以把所述N个第二待作业点作为下一路径规划过程中的所述第一待作业点,以重新规划所述机器人的作业运动路径;
所述驱动器,还用于根据所述控制器判断的所述移动时间戳大于所述第二特定时间值的结果,受所述控制器控制在所述第一待作业点之后插补N个第二待作业点,以把所述N个第二待作业点作为下一路径规划过程中的所述第一待作业点,以重新规划所述机器人的作业运动路径,其中所述N为大于零的整数。
作为一种可选的实施方式,所述系统还包括传感器,用于进行检测检测,记录采样示教过程中的M个所述第一待作业点的空间位置点;其中,所述M为大于零的整数;
所述总控制器,还用于计算相邻作业时间对应的两个所述第一待作业点之间的位置间距,获得设定的单位时间内的期望速度,根据所述位置间距和所述期望速度获得所述移动时间戳。
本发明提供一种基于深度学习的移动机器人路径规划方法及系统,通过总控制器计算第一待作业点的移动时间戳;;如果所述移动时间戳大于第一特定时间值,且小于第二特定时间值,则控制所述驱动器驱动一电机轴进行动作;所述第二特定时间值大于所述第一特定时间值;如果所述移动时间戳小于所述第一特定时间值,则控制所述驱动器维持原工作状态;如果所述移动时间戳大于所述第二特定时间值,则控制所述驱动器在所述第一待作业点之后插补N个第二待作业点,以把所述N个第二待作业点作为下一路径规划过程中的所述第一待作业点,以重新规划所述机器人的作业运动路径,根据计算出的移动时间戳与特定时间进行比较,选择插补新的作业点还是维持原来状态,以重新矫正到下一待作业点的路径曲线,步骤简单,计算方便,不用周期性的发送试探信息和收到的反馈信息进行位置闭环曲线计算以矫正规划路线,节约了通信时间,根据期望的移动速度和时间戳的比较能够实时矫正更合理的路线。
附图说明
图1为本发明实施例提供的一种基于深度学习的移动机器人路径规划方法流程图;
图2为本发明实施例提供的另一种基于深度学习的移动机器人路径规划方法流程图。
具体实施方式
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
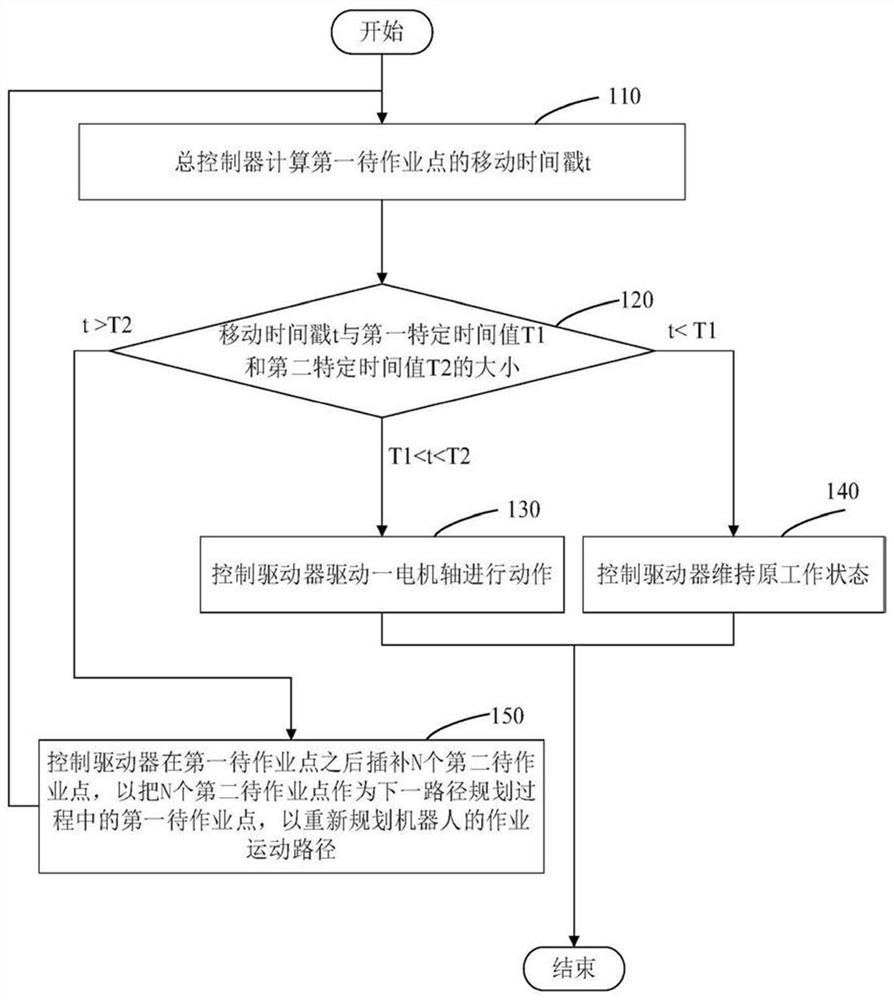
图1为本发明实施例提供的一种基于深度学习的移动机器人路径规划方法流程图。如图1所示,本实施例提供的基于深度学习的移动机器人路径规划方法包括:
110、总控制器计算第一待作业点的移动时间戳t;
120、判断移动时间戳t与第一特定时间值T1和第二特定时间值T2的大小;
如果移动时间戳t大于第一特定时间值T1,且小于第二特定时间值T2,则执行下述
步骤130;
130、控制驱动器驱动一电机轴进行动作;第二特定时间值T2大于第一特定时间值T1;
如果移动时间戳t小于第一特定时间值T1,则执行下述步骤140;
140、控制驱动器维持原工作状态;
如果移动时间戳t大于第二特定时间值T2,则执行下述步骤150;
150、控制驱动器在第一待作业点之后插补N个第二待作业点,以把N个第二待作业点作为下一路径规划过程中的第一待作业点,以重新规划机器人的作业运动路径;其中N为大于零的整数。在本实施方式中,控制器控制驱动器的同时,会下发待作业点的关键值,以便驱动器根据所述关键值进行关键动作。
作为一种可选的实施方式,请参见图2,图2为本发明实施例提供的另一种基于深度学习的移动机器人路径规划方法流程图,如图2所示,基于图1所示的步骤110进一步包括以下步骤,即总控制器计算第一待作业点的移动时间戳t,包括:
111、通过传感器进行检测,记录采样示教过程中的M个第一待作业点的空间位置点;其中,M为大于零的整数;
112、计算相邻作业时间对应的两个第一待作业点之间的位置间距;
113、获得设定的单位时间内的期望速度;
114、根据位置间距和期望速度获得移动时间戳t。
另一方面,本发明实施例还提供一种机器人作业运动路径规划系统,请参见。
为本发明实施例提供的一种机器人作业运动路径规划系统结构图。如所示,本实施例提供的机器人作业运动路径规划系统100包括总控制器310、驱动器320,总控制器310用于计算第一待作业点的移动时间戳t;总控制器310用于判断移动时间戳t是否在第一特定时间值T1至第二特定时间值T2范围内;所述总控制器310,还用于判断所述移动时间戳是否在所述第一特定时间值至所述第二特定时间值范围内;如果所述移动时间戳大于所述第一特定时间值,且小于所述第二特定时间值,则所述总控制器310还用于控制与所述第一待作业点对应的驱动器320驱动一电机轴进行动作;驱动器320还用于根据总控制器310判断的如果移动时间戳t大于第一特定时间值T1,且小于第二特定时间值T2,则用于驱动一电机轴进行动作;如果所述移动时间戳小于所述第一特定时间值,所述总控制器310还用于控制与所述第一待作业点对应的所述驱动器320维持原工作状态;驱动器320还用于根据总控制器310判断的移动时间戳t小于第一特定时间值T1的结果,维持原工作状态;如果所述移动时间戳大于所述第二特定时间值,所述总控制器310,还用于控制与所述第一待作业点对应的所述驱动器320在所述第一待作业点之后插补N个第二待作业点,以把所述N个第二待作业点作为下一路径规划过程中的所述第一待作业点,以重新规划所述机器人的作业运动路径;驱动器320还用于根据总控制器310判断的移动时间戳t大于第二特定时间值T2的结果,则在第一待作业点之后插补N个第二待作业点,以把N个第二待作业点作为下一路径规划过程中的第一待作业点,以重新规划机器人的作业运动路径,其中N为大于零的整数。
作为一种可选的实施方式,本实施方式提供的机器人作业运动路径规划系统100
还包括传感器,用于进行检测,记录采样示教过程中的M个第一待作业点的空间位置点;其中,M为大于零的整数;总控制器310还用于计算相邻作业时间对应的两个第一待作业点之间的位置间距,获得设定的单位时间内的期望速度,根据位置间距和期望速度获得移动时间戳t。
综上描述,本发明实施例提供的基于深度学习的移动机器人路径规划方法及系统,通过总控制器计算第一待作业点的移动时间戳;;如果所述移动时间戳大于第一特定时间值,且小于第二特定时间值,则控制所述驱动器驱动一电机轴进行动作;所述第二特定时间值大于所述第一特定时间值;如果所述移动时间戳小于所述第一特定时间值,则控制所述驱动器维持原工作状态;如果所述移动时间戳大于所述第二特定时间值,则控制所述驱动器在所述第一待作业点之后插补N个第二待作业点,以把所述N个第二待作业点作为下一路径规划过程中的所述第一待作业点,以重新规划所述机器人的作业运动路径,根据计算出的移动时间戳与特定时间进行比较,选择插补新的作业点还是维持原来状态,以重新矫正到下一待作业点的路径曲线,步骤简单,计算方便,不用周期性的发送试探信息和收到的反馈信息进行位置闭环曲线计算以矫正规划路线,节约了通信时间,根据期望的移动速度和时间戳的比较能够实时矫正更合理的路线。
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于深度学习的移动机器人路径规划方法
- 移动机器人的地图创建方法及基于该地图的路径规划方法