一种基于云平台的型材流转监控输送系统及方法
文献发布时间:2024-01-17 01:14:25
技术领域
本发明属于型材流转及管理技术领域,具体地涉及一种基于云平台的型材流转监控输送系统及方法。
背景技术
目前,铝合金型材生产企业的型材流转一般采用物流单方式,即,在一框型材生产及装框完成后工作人员手动打一张物流单作为记录,以每个料框为单位进行型材的流转及跟踪。由于型材需要经过多个环节转运多次,现有的此种方式容易存在人为因素导致的疏漏或误差,自动化程度低、效率较低,并且不够灵活。
实际生产中,尤其对于大型生产企业而言,型材产量极大,时常会出现盘点过程中发现某料框中缺失一两根型材的情况。一旦出现此种情况,就需要单独地临时加工补单,在流水线上用一个料框只装一两根该型材进行流转,耗费人力物力及时间成本,非常麻烦。
因此需要一种新的方案对型材流转进行更为精细化且自动化的管理,但由于不同型材的形状各异,较难设计出普适性强的自动流转监控方案,故目前市面上也尚未见有企业开发出此类系统。
发明内容
本发明所要解决的技术问题在于:提供一种基于云平台的型材流转监控输送系统及方法,实现自动化的型材流转及精细化管理,避免人工操作打物流单易产生疏漏,进而需要临时加工补单、费时费力的问题;同时,对型材的监控具体到每一根型材,有助于解决后续可能产生的纠纷,并且更便于对型材质量问题进行工序方面的排查。
依据本发明的技术方案,本发明提供了一种基于云平台的型材流转监控输送系统,其特征在于,包括有:
检测平台:其上设有用于输送型材的进料机构和移料机构;
激光蚀刻机:其设置于检测平台的上方,用于在型材表面蚀刻编号;
型材编码识别单元:其设置于检测平台的上方,且位于激光蚀刻机的沿移料机构输送方向的下游侧;
型材形状识别单元:其设置于检测平台的侧面;
转运平台:其位于检测平台的下游侧;移料机构延伸至转运平台的下游端;
位置识别器:其设置于转运平台上;
装框机构:其位于转运平台的下游侧;
料框:其位于装框机构的下游侧;在料框上设置有料框编号牌;
料框编号识别单元:其正对料框编号牌;
主控电脑:其与基于云平台的型材流转监控输送系统中的各个电气设备相连接以接收信号或进行控制;
云平台:其与主控电脑无线通信连接以进行信息交互。
进一步地,进料机构的输送路线的上游端设置有进料感应开关,和/或,进料机构的输送路线的下游端设置有型材阻档板;
检测平台上还设置有编码识别感应开关,编码识别感应开关位于型材编码识别单元下方。
优选地,移料机构包括有型材推料线性模组,型材推料线性模组上设置有推料块;推料块具有用于推动型材的挡板,挡板高出于检测平台的上表面。
优选地,检测平台上还设置有反向输送带,反向输送带的输送方向与移料机构的输送方向相反。
优选地,位置识别器包括沿移料机构的输送方向排布设置的多个传感器。
优选地,装框机构包括有位于检测平台和料框的连线两侧位置的两个摆臂基座,摆臂基座上转动连接有摆臂,摆臂连接有摆动电机;摆臂的上方吊挂有吊篮。
进一步地,两个摆臂的上方相对地延伸设置有悬臂,悬臂上沿长度方向设置有电动伸缩杆,电动伸缩杆的末端连接有滑轮,摆臂上设置有提升机,提升机连接有绳索,绳索经过滑轮后与吊篮相连接;
吊篮呈两侧贯通的框架结构,吊篮的下方为底板,绳索连接于吊篮的底板上方居中位置;型材的两端分别放置在两个吊篮的底板上。
优选地,检测平台还连接有第一升降线性模组和第二升降线性模组,激光蚀刻机与第一升降线性模组相连接,型材编码识别单元与第二升降线性模组相连接;第一升降线性模组和第二升降线性模组均通过横向设置的型材编码线性模组与检测平台相连接;
型材形状识别单元通过横向设置的型材识别线性模组与检测平台相连接。
本发明还提供一种基于云平台的型材流转监控输送方法,采用本发明的基于云平台的型材流转监控输送系统进行实施,其包括如下步骤:
步骤S1,型材由外部设备输送到检测平台,进料机构带动型材继续移动至检测平台中部,型材脱离外部设备;
步骤S2,型材移动到位后,型材形状识别单元对型材的截面形状和尺寸进行识别,将得到的形状尺寸信息反馈至主控电脑,主控电脑对信息进行处理后将信息与云平台的数据库进行交互,获得型材的型号及标准尺寸信息;
步骤S3,主控电脑根据预设的编码规则进行编码,将编码信息反馈给激光蚀刻机,激光蚀刻机在型材的表面进行编码的蚀刻动作;
步骤S4,蚀刻完成后,移料机构继续推动型材行进至型材编码识别单元下方,型材编码识别单元对编码进行识别,将得到的编码信息反馈至主控电脑,然后移料机构继续推动型材至转运平台;位置识别器对转运平台上放置的型材位置及数量进行识别;
步骤S5,重复步骤S1至步骤S4,后续的型材在移动至转运平台后依序并排放置,直到位置识别器的识别结果显示出放置的型材数量达到上限值或设定值;
步骤S6,装框机构将放置于转运平台的多根型材搬运至料框;
步骤S7,装框完成后,料框编号识别单元对料框的料框编号牌进行识别,将得到的料框编号信息反馈至主控电脑,主控电脑将料框编号信息及该料框中的全部型材的编码信息整合并上传至云平台进行储存。
具体一实施例中,所述位置识别器包括沿所述移料机构的输送方向排布设置的多个光电传感器,多个光电传感器之间的间距相同;
步骤S4及步骤S5中,位置识别器对型材位置及数量进行识别的过程包括:
输送至转运平台的第一个型材在遮盖到位置识别器最靠近下游端的一个光电传感器后停止移动;主控电脑根据光电传感器的被遮盖情况计算出转运平台的剩余位置距离;当剩余位置距离大于型材的宽度尺寸,则重复步骤S1至步骤S4,后续的型材在移动至遮盖到位置识别器最靠近下游端的一个之前未被遮盖的光电传感器后停止移动,主控电脑再次判断剩余位置距离;当剩余位置距离小于型材的宽度尺寸,说明放置的型材数量达到了上限值。
与现有技术相比,本发明的有益技术效果如下:
1、本方案在装框前对每根型材逐个进行识别、刻蚀编号并将信息记录上传云平台,从而实现在型材流转过程中精准监控,不仅能监控料框的情况,更能细化地监控到每根型材的情况,从而一旦出线型材缺失情况,都能够及时发现,从而找回或补单,节省人力和时间,避免了交货前盘点时才发现疏漏的情况,同时也提高了盘点的效率、减少了人工进行的工作量。
2、本方案采用位置识别器等一系列特定设置的传感器,结合主控电脑及云平台,实现自动化智能控制,能够适用于各种型材,普适性强,尤其适用于硬度较高、刚性较强的型材。
3、本方案对每根型材的表面进行编码,可采用特定的编码规则,形成每根型材独一无二的识别编码,除了流转过程中监控方便之外,在出厂后的后续使用中也能够作为防伪标识,根据该型材类型及编号能够对应地在云平台储存的数据中查找到相关信息,从而协助解决纠纷。
附图说明
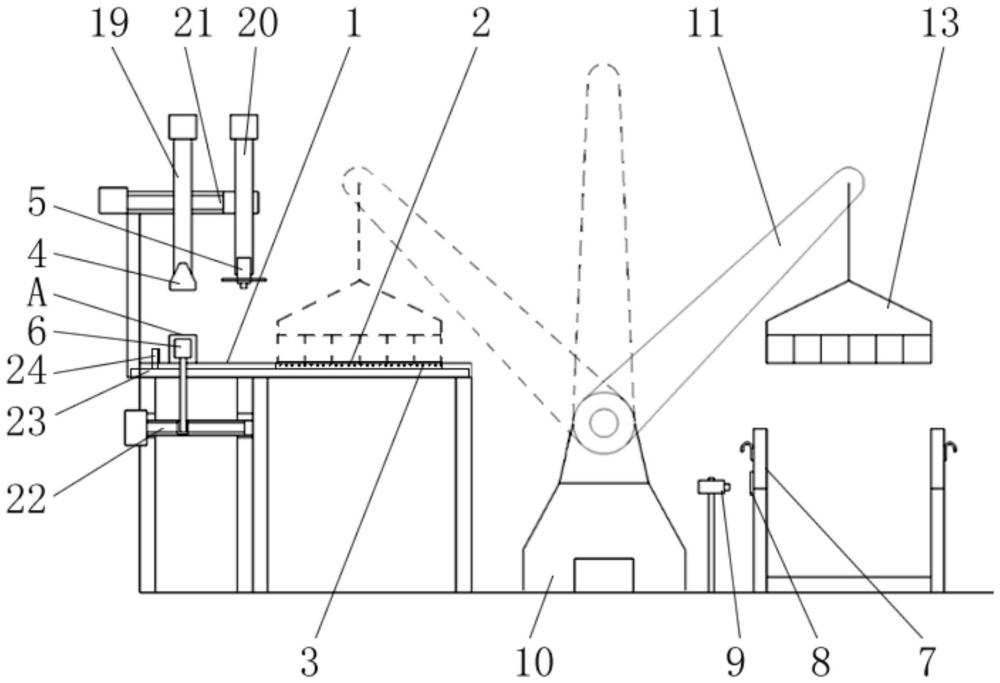
图1是本发明一实施例的主视结构示意图。
图2是图1所示结构中检测平台、转云平台部分及吊篮的俯视结构示意图。
图3是图1所示结构中装框机构及料框部分的右视结构示意图。
图4是本发明一实施例的方法流程图。
附图中的附图标记说明:
1、检测平台;
2、转运平台;
3、位置识别器;
4、激光蚀刻机;
5、型材编码识别单元;
6、型材形状识别单元;
7、料框;
8、料框编号牌;
9、料框编号识别单元;
10、摆臂基座;
11、摆臂;
12、摆动电机;
13、吊篮;
14、悬臂;
15、电动伸缩杆;
16、滑轮;
17、提升机;
18、绳索;
19、第一升降线性模组;
20、第二升降线性模组;
21、型材编码线性模组;
22、型材识别线性模组;
23、型材推料线性模组;
24、推料块;
25、电动输送滚轮;
26、进料感应开关;
27、型材阻档板;
28、编码识别感应开关;
29、反向输送带;
A、型材。
具体实施方式
本发明的主要目的在于解决型材的精细化管理问题,为此设计一种基于云平台的型材流转监控输送系统及方法,其系统结构主要包括检测平台1、激光蚀刻机4、型材编码识别单元5、型材形状识别单元6、转运平台5、位置识别器3、装框机构、料框7、料框编号识别单元9、主控电脑以及云平台。其方法流程主要包括上料、识别型材形状、蚀刻编码、记录型材编码、处理多根型材、装框以及记录料框编号。本方案给每一根型材进行物料编码,然后以料框为物流流转单位,进行各工序的流转,实现更为机械化、自动化、智能化、精细化的型材流转及管理,型材可以具体监管到每一根,避免人工操作疏漏而无法及时发现等情况,并且能够适用于各种型材,普适性强。
请参阅图1,本发明一实施例的一种基于云平台的型材流转监控输送系统,包括有检测平台1,用于放置型材A以进行识别、编码、记录等一系列操作以便监控管理。检测平台1例如位于型材锯切机构的传输架后方,在型材成型、锯切至所需长度后,被输送至检测平台1上。检测平台1上设有用于输送型材A的进料机构和移料机构。
具体而言,请同时参阅图2,检测平台1例如为架台结构,检测平台1的上表面为用于放置型材A的放置面,下方为支架。进料机构包括有设置于检测平台1上游端的电动输送滚轮25,以此带动放在其上的型材A向进料机构的下游端(图2中的下方)移动。进料机构的输送路线的上游端设置有进料感应开关26,当型材A移动遮盖进料感应开关26的上方,或者移出进料感应开关26的上方时,进料感应开关26能够产生相应的信号。进料感应开关26优选为位置可调节,使其与型材形状识别单元6之间的距离略大于型材A的长度,从而型材A移出进料感应开关26上方的位置即适合型材形状识别单元6对型材A进行识别。
进料机构的输送路线的下游端优选还活动设置有型材阻档板27,例如,型材阻档板27通过可伸缩的气缸与检测平台1相连接,型材阻档板27能够将型材A阻挡定位在型材形状识别单元6前方,然后能够向上/下/左/右移开,不阻碍型材形状识别单元6的识别。
移料机构例如包括有型材推料线性模组23,型材推料线性模组23上设置有推料块24。检测平台1放置面上开设有线性模组槽,型材推料线性模组23及推料块24均位于线性模组槽内。推料块24具有用于推动型材A的挡板,挡板高出于检测平台1的上表面,从而形成在水平的放置面上具有突出的、可移动的挡板的结构,挡板从后方推动型材A向前移动。优选地,型材推料线性模组23至少有两组,例如为三组,且为间隔地并排设置,保证型材A移动平稳且能够正对型材形状识别单元6(即型材A长度方向为图2中的上下方向,摆放不歪斜)。
优选地,检测平台1上还设置有反向输送带29,反向输送带29的输送方向与移料机构的输送方向相反,其能够驱动型材A反向运动,从而使型材抵靠在上游侧的推料块24的挡板(或者其他用于定位的挡板结构)上,以此进行调整、定位,以便正对型材形状识别单元6进行扫描。
检测平台1的上方例如通过立柱、悬臂等方式设置有激光蚀刻机4和型材编码识别单元5。激光蚀刻机4用于在型材A表面蚀刻编码。型材编码识别单元5位于激光蚀刻机4的沿移料机构输送方向的下游侧,用于识别记录型材A表面的编码。具体例如,检测平台1连接有第一升降线性模组19和第二升降线性模组20,激光蚀刻机4与第一升降线性模组19相连接,型材编码识别单元5与第二升降线性模组20相连接,从而激光蚀刻机4和型材编码识别单元5能够在控制下进行上下升降,根据型材尺寸调整到合适的高度进行蚀刻或识别工作,还可以在型材A输送过程中升起以防止产生剐蹭。更优选地,第一升降线性模组19和第二升降线性模组20均通过横向设置的型材编码线性模组21与检测平台1相连接,型材编码线性模组21通过立柱设置于检测平台1的上方。
在检测平台1的侧面、且位于激光蚀刻机4下方的位置,设置有型材形状识别单元6,用于识别型材的形状。型材形状识别单元6优选通过横向设置的型材识别线性模组22与检测平台1相连接。激光蚀刻机4、型材编码识别单元5及型材形状识别单元6均可在手动或自动控制下调整位置,使其正对型材A,以顺利完成相应工作。
检测平台1上还设置有编码识别感应开关28,编码识别感应开关28位于型材编码识别单元5下方。当型材A移动至编码识别感应开关28上方后,停止移动,编码识别单元5对型材编码进行识别记录,然后继续输送等待装框,这样保证装框前对每根型材进行记录,以及在进行编码识别记录前还可以根据实际情况(例如工作人员发现有不合格的型材)而撤出或增加型材,型材的输送可以不受编码生成、蚀刻顺序的限制,使用灵活。
在检测平台1沿移料机构输送方向的下游侧(图2中的右侧),延续地或独立地设置有转运平台2,移料机构的范围延伸至转运平台2的下游端,转运平台2上用于码放已经过编码、记录等程序的待装框转运的型材。
转运平台2上设置有位置识别器3,用于识别型材A的位置及数量。优选地,位置识别器3包括沿移料机构的输送方向排布设置的多个光电传感器,排列的长度略短于转运平台2的宽度,多个光电传感器之间的间距相同,例如为1cm,这样就形成了多组的信号源。型材A移动到转运平台2上、遮盖部分信号源,主控电脑能够以此获得该型材A的位置,以及转运平台2上的剩余码放空间。
在转运平台2的下游侧外设置有装框机构,装框机构的下游侧放置有料框7(例如放置在特定的料框放置区域内),料框7上的一侧设置有料框编号牌8。还包括料框编号识别单元9,料框编号识别单元9正对料框编号牌8,以对料框的编号进行识别、记录。
请参阅图3,装框机构包括有位于检测平台1和料框7的连线两侧位置的两个摆臂基座10,摆臂基座10上转动连接有摆臂11,摆臂11连接有摆动电机12。例如摆臂11具有转轴,摆臂基座10具有转轴孔,与该转轴形成枢轴连接,该转轴与摆动电机的输出端相连接。摆臂11的上方吊挂有用于承托型材的吊篮13。具体一实施例中,两个摆臂11的上方相对地延伸设置有悬臂14,悬臂14上沿长度方向相对地设置有电动伸缩杆15,电动伸缩杆15的末端连接有滑轮16,摆臂11上设置有提升机17,提升机17上卷绕连接有绳索18,绳索18经过滑轮16(以及还可经过若干设于摆臂11上的定滑轮)后与吊篮13相连接。吊篮13呈两侧贯通的框架结构,吊篮13的下方为底板,绳索18连接于吊篮13的底板上方居中位置。型材A的两端分别放置在两个吊篮13的底板上。
上述装框机构的工作过程及原理为:转运平台2上码放了一定数量的型材后,摆臂11将吊篮13摆动至转运平台2两侧上方,此时电动伸缩杆15为收缩状态,两吊篮13的间距大于型材A并位于型材A的两端之外。提升机17向外释放绳索18,吊篮13的底板下降至型材A下方,然后电动伸缩杆15伸长,两吊篮13间距缩短、套在一排型材外,提升机17将绳索18收卷,吊篮13上升将型材吊起。此过程中,请参阅图2,型材A两端悬空于转运平台2外,吊篮13的移动不会受到转运平台2的阻碍。摆臂11将吊篮13摆动至料框7处,以类似相反的过程释放型材至料框7中。
主控电脑与本系统中的上述各个电气设备相连接以接收信号或进行控制。主控电脑例如为包含伺服控制、数据处理、存储、上传等功能的计算机系统,包括有显示屏,其中显示有料框及型材信息、物流动作及物流环节等,便于查看。云平台即云端数据平台,与主控电脑通过无线网络通信连接以进行信息交互,例如数据、信号的接收、存储、处理及发送等。优选地,还包括客户端,例如为手机端程序,能够向云平台发送请求、并接收消息推送,实现随时随地根据型材编码查询其流转输送过程等。
需要说明的是,本方案中的各个线性模组例如均具有滑台、滑轨和伺服电机,由主控电脑进行控制驱动。各个识别单元例如均为三维扫描仪,能够进行视觉识别,获得型材截面平面形状、尺寸或者识别字符等。上述部件均采用现有技术方案即可,计算机系统、程序等基于现有技术亦能够设计实现,故不进行赘述。
请参阅图4,基于本发明上述系统,本发明还提供一种基于云平台的型材流转监控输送方法,以优选实施方式为例,其包括如下步骤。
步骤S1,上料。型材A在检测平台1的上游端外经过上一道工序加工例如锯切后,由例如输送架等外部设备输送到检测平台1的电动输送滚轮25上,型材A遮盖、触发进料感应开关26,电动输送滚轮25随之启动,且型材阻档板27移动到位;电动输送滚轮25带动型材A继续移动至检测平台1中部,型材A脱离外部设备。
根据具体设定,当型材A越过进料感应开关26或者被型材阻档板27阻挡后,认为型材A移动到位,电动输送滚轮25停止,移料机构(包括反向输送带29)启动,启动后如10s后停止,型材阻档板27回撤,使型材A定位摆正,型材A的侧面正对型材形状识别单元6。
可选地,随后型材形状识别单元6开始识别型材A的位置,将位置信息反馈至主控电脑,主控电脑经过计算后控制型材形状识别单元6和激光蚀刻机4的位置移动到正对型材A中线的位置。
步骤S2,识别型材形状。型材形状识别单元6对型材A的截面形状和尺寸进行识别,将得到的形状尺寸信息反馈至主控电脑,主控电脑对信息进行处理后将信息与云平台的数据库进行交互,获得型材A的型号及标准尺寸等信息。
步骤S3,蚀刻编码。主控电脑根据预设的编码规则进行编码,将编码信息反馈给激光蚀刻机4,激光蚀刻机4在型材A的表面进行编码的蚀刻动作。编码例如由字母和数字组成,其生成所依据的信息例如包括型材种类、生产批次、工序内容、机台编号、上机时间中的至少一项,并且生成的每一个编码均不相同。
步骤S4,记录型材编码。蚀刻完成后,移料机构继续推动型材A行进,型材A遮盖触发编码识别感应开关28后停止移动,型材编码识别单元5开始对编码进行识别,将得到的编码信息反馈至主控电脑,然后移料机构继续推动型材A至转运平台2;位置识别器3对转运平台2上放置的型材位置及数量进行识别。
步骤S5,处理多根型材。重复步骤S1至步骤S4,后续的型材在移动至转运平台2后依序并排放置,直到位置识别器3的识别结果显示出放置的型材数量达到上限值或设定值。
步骤S6,装框。装框机构将放置于转运平台2的多根型材搬运至料框7。
步骤S7,记录料框编号。装框完成后,料框编号识别单元9对料框7的料框编号牌8进行识别,将得到的料框编号信息反馈至主控电脑,主控电脑将料框编号信息、该料框7中的全部型材的编码信息、以及还可以包含当前时间、生产批次、工序类型等信息整合并上传至云平台进行储存。然后该料框7被后续的外部设备如行车转运到下一工序。此系统如此往复运行。
后续工序在装框时,也以类似的结构和方式对料框及每根型材进行识别和记录;可以无需激光蚀刻机4、型材形状识别单元6及相关结构、步骤。这样,每一料框7中放有的型材数量、编码都会记录在云平台中,机械自动化控制装料,不会出现漏装的情况,相当于每次装框前都进行自动盘点监控,因此出现问题也能够及时发现,便于快速解决。
进一步地,步骤S4及步骤S5中,优选实施方式的位置识别器3对型材A位置及数量进行识别的过程包括:
输送至转运平台2的第一个型材A在遮盖到位置识别器3最靠近下游端的一个光电传感器后停止移动;移料机构返回初始位置等待进行下一个型材A的搬运,同时主控电脑根据光电传感器的被遮盖情况计算出转运平台2的剩余位置距离,当剩余位置距离大于型材A的宽度尺寸,则重复步骤S1至步骤S4,后续的型材A在移动至遮盖到位置识别器3最靠近下游端的一个之前未被遮盖的光电传感器后停止移动,主控电脑再次判断剩余位置距离;当剩余位置距离小于型材A的宽度尺寸,说明放置的型材A数量达到了上限值。即,在转运平台2上,型材A从图2中的右侧至左侧依次码放,并遮盖位置识别器3的光电传感器,当未被遮盖的光电传感器的范围不足以容纳一根型材A,说明转运平台2已经放满型材A了。需要说明的是,吊篮13的宽度与位置识别器3的长度相匹配,保证吊篮13能够套住码放的一排型材A。
综上所述,本方案在装框前对每根型材逐个进行识别、刻蚀编号并将信息记录上传云平台,从而实现在型材流转过程中精准监控,不仅能监控料框的情况,更能细化地监控到每根型材的情况,一旦出线型材缺失情况,都能够及时发现,从而找回或补单,节省人力和时间,同时也提高了盘点的效率、减少了人工进行的工作量。并且,本方案采用位置识别器等一系列特定设置的传感器,结合主控电脑及云平台,实现自动化智能控制,能够适用于各种不同宽度的型材,普适性强,尤其适用于硬度较高、刚性较强的型材。此外,本方案对每根型材的表面进行编码,可采用特定的编码规则,形成每根型材独一无二的识别编码,除了流转过程中监控方便之外,在出厂后的后续使用中也能够作为防伪标识,例如在使用中某一型材出现了问题,便可根据该型材类型及编号在云平台储存的数据中查找相关信息,判断是否是本厂的产品,以及是否在哪一流转环节出现了问题等,从而对外有助于解决纠纷,对内有助于质量追溯、改进工艺,对于铝型材生产企业,尤其是大型企业而言,具有极强的实用性。
- 一种基于教育云平台的实时监控屏幕的方法及系统
- 一种云平台虚拟机文件系统监控方法和装置
- 一种智慧工地管控平台的监控系统与云平台对接的方法
- 云平台智能安防设备及基于云平台的安防监控系统和方法
- 一种基于云平台的工程文件审批流转系统