一种基于超声电机的医疗机械臂
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及医疗器械技术领域,更具体地说,它涉及一种基于超声电机的医疗机械臂。
背景技术
核磁共振检测是现代医学中重要的疾病检查手段,通过核磁共振可帮助医生“看见”不易察觉的早期病变,在通过核磁共振进行检测时需要患者平躺在床体上,然后通过床体的移动将患者送入核磁共振检测仪内进行相应部位的检测。
核磁共振在扫描时,由于环境特殊,医务人员不便进入,仅能通过监控画面并配合对讲系统与受检患者沟通,从而调整核磁共振检查时的身体位置,但对于部分行动不便或配合能力较差的患者,对于身体位置的调整作业十分不便,降低了医护人员的工作效率,因此,如果有一种辅助装置能够在医生的操控下辅助患者的身体在检查床上移动到合适位置,将大大提高检查效率。
但是,在核磁共振室,由于磁场的影响,不能使用普通的电磁电机,为避免电磁电机的失效,与核磁共振设备配套的设备一般都是采用手动的方式。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种可远程进行操作对患者身体位置进行调整的基于超声电机的医疗机械臂。
为实现上述目的,本发明提供了如下技术方案:
一种基于超声电机的医疗机械臂,其特征在于:
包括直线导轨;所述直线导轨表面滑动配合有底端座;所述直线导轨内部两端之间转动连接有第三丝杠;所述第三丝杠通过滚珠螺母与底端座配合连接;所述底端座上转动连接有旋转座;
所述旋转座顶部铰接有支撑臂;所述支撑臂远离旋转座一端部转动连接有连接筒;所述连接筒内部转动连接有第一螺杆;所述连接筒远离支撑臂一端内部套设有支架;
所述支架包括与连接筒相配合的端轴;所述端轴端部固定有U形架;所述U形架两端转动连接有两相对设置的第二螺杆;
所述U形架两端部之间设有端板;所述端板两端表面均开设有限位导槽;两所述限位导槽内侧滑动配合有与第二螺杆螺纹配合的限位导座;
所述端板远离U形架一表面中心位置设有双轴铰座;所述端板通过双轴铰座铰接有两个相互对称设置的侧推板;两所述侧推板背面与两个限位导座之间铰接有连杆;
所述端板一侧固定设有L形架;所述L形架另一端垂直设有侧撑板。
本发明进一步设置为:所述底端座内部为开设有空腔;所述空腔内安装有第一超声电机;所述第一超声电机的转轴端连接旋转座;
所述空腔顶端为圆形开口结构;所述空腔的内壁开设有限位环槽。
本发明进一步设置为:所述旋转座底端周侧面设有与限位环槽相配合的限位导环;
所述旋转座顶端设有连接铰座;所述连接铰座一侧固定设有第二超声电机;所述第二超声电机的转轴端与支撑臂的底端连接。
本发明进一步设置为:所述支撑臂为弧形结构;所述支撑臂底端部设有与连接铰座相配合的铰接轴;
所述支撑臂顶端部设有顶端座;所述顶端座内安装有第三超声电机;所述第三超声电机转轴端与连接筒的内端连接。
本发明进一步设置为:所述连接筒一端部为开口结构;所述连接筒另一端设有端座板;所述端座板侧面设有与顶端座相互转动连接的旋转轴;所述端座板表面固定设有第四超声电机;所述第四超声电机转轴端与第一螺杆端部固定连接;所述连接筒内部两端之间开设有限位槽。
本发明进一步设置为:所述端轴远离U形架一端部设有与连接筒相互套接的限位端头;所述限位端头周侧面设有与限位槽相配合的限位导块;所述限位端头和端轴端部之间开设有与第一螺杆相配合的第二螺纹孔。
本发明进一步设置为:所述限位导座一表面设有与第二螺杆相配合的螺纹套筒;所述限位导座另一表面设有与连杆端部相互铰接的第一连接轴。
本发明进一步设置为:所述侧推板背面设有与连杆端部相互铰接的第二连接轴;所述侧推板和侧撑板相对面均设有软垫。
本发明进一步设置为:所述U形架两端外部均固定设有第五超声电机;两所述第五超声电机转轴端分别与两个第二螺杆端部固定连接。
本发明进一步设置为:所述直线导轨一端部固定设有第六超声电机;所述第六超声电机转轴端与第三丝杠端部固定连接。
本发明的优点
1、通过连接筒、第一螺杆、支架、第二螺杆、限位导座、侧推板和连杆的配合使用,第四超声电机带动第二螺杆转动,使得支架整体移动,并配合侧撑板使患者整体平移,且两个第五超声电机带动第二螺杆转动,并在限位导座和连杆的作用下推动侧推板翻转,对患者身体位置进行调整,可远程进行操作,提高了医护人员的工作效率。
2、通过第三丝杠转动并经第三丝杠带动装置整体移动,且旋转座经第一超声电机转动,并配合支撑臂在第二超声电机作用下翻转,同时连接筒整体经第三超声电机翻转,实现多自由度变位,整体操作便捷,且通过采用多个超声电机,避免电机在核磁环境下失效。
附图说明
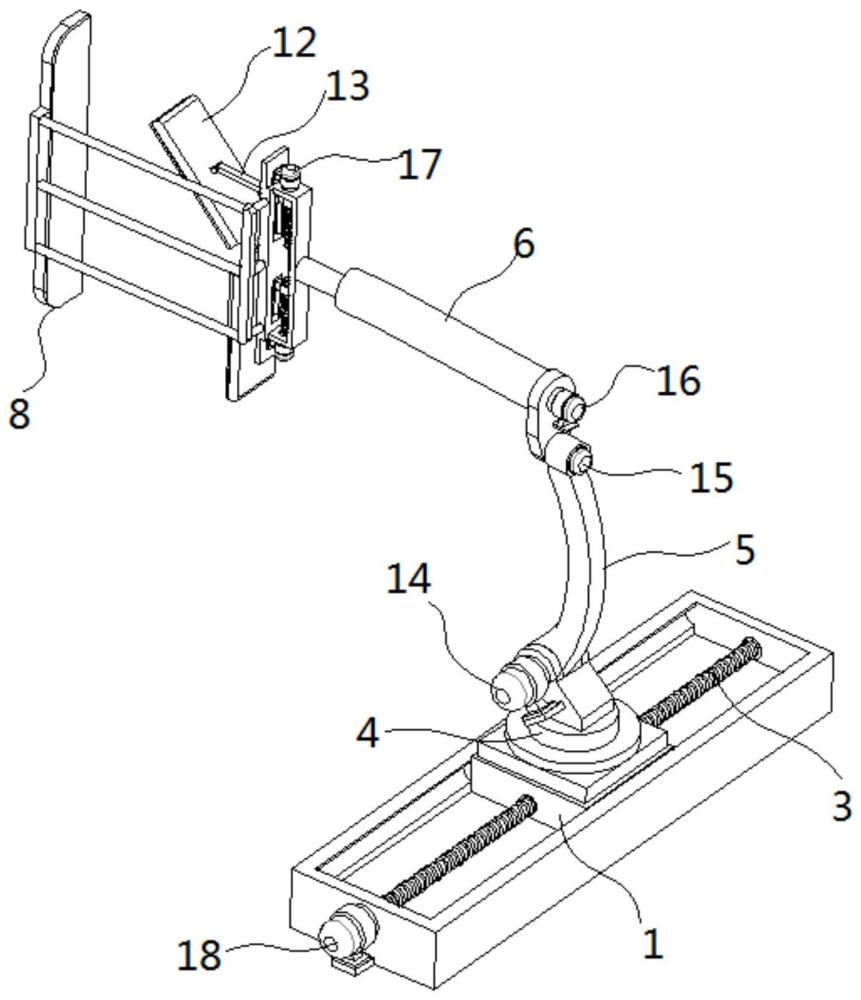
图1为本发明一种基于超声电机的医疗机械臂的结构示意图。
图2为本发明一种基于超声电机的医疗机械臂的剖视结构示意图。
图3为本发明图2中A处的结构示意图。
图4为本发明底端座的结构示意图。
图5为本发明旋转座的结构示意图。
图6为本发明支撑臂的结构示意图。
图7为本发明连接筒的结构示意图。
图8为本发明支架的结构示意图。
图9为本发明限位导座的结构示意图。
图10为本发明侧推板的结构示意图。
图中:1、直线导轨;2、第三丝杠;3、底端座;4、旋转座;5、支撑臂;6、连接筒;7、第一螺杆;8、支架;9、第二螺杆;10、限位导座;11、侧推板;12、连杆;13、第一超声电机;14、二超声电机;15、第三超声电机;16、第四超声电机;17、第五超声电机;18、第六超声电机;301、空腔;302、限位环槽;401、限位导环;402、连接铰座;501、铰接轴;502、顶端座;601、端座板;602、旋转轴;603、限位槽;801、端轴;802、U形架;803、端板;804、限位导槽;805、双轴铰座;806、L形架;807、侧撑板;808、限位端头;809、限位导块;8010、第二螺纹孔;1001、螺纹套筒;1002、第一连接轴;1101、第二连接轴。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互结合。下面将参考附图并结合实施例来详细说明本发明。
需要指出的是,除非另有指明,本申请使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。
本发明中,在未作相反说明的情况下,使用的方位如“上、下”通常是针对附图所示的方向而言,或者是针对竖直、垂直或重力方向上而言的;同样地,为便于理解和描述,“左、右”通常是针对附图所示的左、右;“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本发明。
实施例一
请参阅图1-7,本发明提供以下技术方案:
具体地,本发明实施例的基于超声电机的医疗机械臂包括直线导轨1;直线导轨1上滑动配合有底端座3;直线导轨1内部两端之间转动连接有第三丝杠2;第三丝杠2上通过滚珠螺母螺旋连接有底端座3;直线导轨1的一端部固定设有第六超声电机18;第六超声电机18的输出端通过联轴器与第三丝杠2连接;底端座上转动连接有旋转座4;底端座3内部开设有空腔301;空腔301内部安装有第一超声电机13;第一超声电机13的转轴端连接旋转座4;空腔301顶端为圆形开口结构;空腔301的内壁开设有限位环槽302;;旋转座4底端外周侧面设有与限位环槽302相配合的限位导环401;旋转座4顶端设有连接铰座402;连接铰座402上安装有第二超声电机14;第二超声电机14的输出轴与支撑臂5的底端连接;旋转座4顶部与支撑臂5;铰接支撑臂5远离旋转座4一端部转动连接有连接筒6;支撑臂5为弧形结构;支撑臂5底端部设有与连接铰座402相配合的铰接轴501;支撑臂5顶端部设有顶端座502;顶端座502内安装有第三超声电机15;第三超声电机15的转轴端与连接筒6端部连接;连接筒6内部转动连接有第一螺杆7;连接筒6的外端端部为开口结构;连接筒6的内端设有端座板601;端座板601侧面设有与顶端座502相互转动连接的旋转轴602;端座板601表面固上安装有第四超声电机16;第四超声电机16的转轴端与第一螺杆7端部连接;连接筒6内部两端之间开设有限位槽603;连接筒6远离支撑臂5一端内部滑动连接有支架8;
本实施例一工作原理:直线导轨1通过螺栓固定设置于核磁共振检查床侧边沿,第六超声电机18转动带动第三丝杠2转动,使得机械臂沿直线导轨1移动至指定位置,第一超声电机13带动旋转座4转动,且由于旋转座4通过限位导环401与空腔301顶端内侧的限位环槽302相互配合,并配合第二超声电机14转动并带动支撑臂5沿旋转座4表面的连接铰座402转动,从而带动支架8整体翻转,使得支架8整体位于床体顶部,同时第三超声电机15转动并带动支架8整体旋转,使得支架8的两个侧推板11位于患者身体一侧,实现对机械臂整体的多自由度变位。
实施例二
请参阅图2-3、图7-10,本实施例二在实施例一的基础上作如下改进,具体地,支架8包括与连接筒6相配合的端轴801;端轴801端部固定有U形架802;U形架802两端外部均安装有设有第五超声电机17;两第五超声电机17的转轴端分别与两个第二螺杆9端部连接;U形架802两端转动连接有两相对设置的第二螺杆9;U形架802两端部之间设有端板803;端板803两端表面均开设有限位导槽804;两限位导槽804内侧滑动配合有与第二螺杆9螺纹配合的限位导座10;限位导座10的一侧设有与第二螺杆9相配合的螺纹套筒1001;限位导座10的另一侧设有与连杆12端部相互铰接的第一连接轴1002;端板803远离U形架802一表面中心位置设有双轴铰座805;端板803通过双轴铰座805铰接有两个相互对称设置的侧推板11;两侧推板11背面与两个限位导座11之间铰接有连杆12;端板803一侧固定设有L形架806;L形架806另一端垂直设有侧撑板807;侧推板11背面设有与连杆12端部相互铰接的第二连接轴1101;侧推板11和侧撑板807相对面均设有软垫;端轴801远离U形架802一端部设有与连接筒6相互套接的限位端头808;限位端头808周侧面设有与限位槽603相配合的限位导块809;限位端头808和端轴801端部之间开设有与第一螺杆7相配合的第二螺纹孔8010。
本实施例二的工作原理:如患者身体位于核磁共振检查床上且偏移靠向机械臂整体一侧时,通过第四超声电机16转动并带动第一螺杆7转动,第一螺杆7在转动时与端轴801和限位端头808之间的第二螺纹孔8010相互配合,位于限位端头808周侧面的限位导块809与连接筒6内壁的限位槽603相互配合,使得支架8整体向另一侧移动,并在两个侧推板11的作用下,将位于两个侧推板11和侧撑板807之间的患者身体向另一侧移动,且两个第五超声电机17转动并带动第二螺杆9转动,两个第二螺杆9在转动时与限位导座10一端的螺纹套筒1001相互配合,且限位导座10与端板803两端表面的限位导槽804相互配合,从而使得两个限位导座10沿端板803两端表面的限位导槽804移动,且限位导座10在移动时带动连杆12翻转,且由于两个侧推板11通过第二连接轴1101与连杆12相互连接,使得两个侧推板11翻转,并配合侧撑板807对位于两个侧推板11和侧撑板807之间的患者身体部分位置进行摆正微调,如患者身体位于核磁共振检查床上偏移远离机械臂整体一侧时,通过第四超声电机16转动,使得支架8通过侧撑板807带动位于两个侧推板11和侧撑板807之间的患者身体向另一侧移动,并配合两个侧推板11翻转对患者身体部分位置进行摆正微调,可远程进行操作,且操作精准便捷,提高了医护人员的工作效率。
显然,上述所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、工作、器件、组件和/或它们的组合。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种基于增益限制补偿器的超声波电机伺服控制系统极限环抑制设计方法
- 一种基于超声电机的多轴机械臂
- 一种基于超声电机的多自由度机械臂