一种医学影像检查模拟训练装置
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及医学模拟训练技术领域,尤其涉及一种医学影像检查模拟训练装置。
背景技术
医学超声检查是一种基于超声波的医学影像学诊断技术,是一项理论性和实操性都很繁博的技术,因此,从业者在上岗前都需要经过系统的学习和培训。超声检查教学时导师会带领学生在超声波设备上进行实际操作训练,但是由于学员操作不当,会导致超声波设备损坏,造成严重的经济损失,同时真实的环境教学中,太多人的围观会使患者产生不适,影响患者的正常治疗,不便于使用者使用。因此,就需要借用一种模拟训练装置来进行新手学员的学习和培训。
目前,现有的模拟训练装置都是直接在一个平台上让学员进行使用,无法有效的模拟出真实的场景,因为在现实中很多影像检查都是具有一定辐射性的,因此学员应该借助一个远程装置来进行模拟训练更为真实,而且现有的模拟训练装置也无法很好模拟出患者不同体位,使得学员无法在不同体位下作出影像检查部位的正确判断,从而不能很好的通过训练来提升学员的技术水平。
发明内容
本发明的目的是为了解决现有技术中无法很好模拟出患者不同体位,使得学员无法在不同体位下作出影像检查部位的正确判断,如此对学员影像检查水平的提升较为不利的问题,而提出的一种医学影像检查模拟训练装置。
为了实现上述目的,本发明采用了如下技术方案:
一种医学影像检查模拟训练装置,包括训练平台,所述训练平台底部四周均固定连接支撑腿,所述训练平台侧壁固定连接有折弯板,所述训练平台底部转动连接有转轴,所述输出轴端贯穿支撑腿侧壁,且所述输出轴端固定连接有转阀,所述转轴侧壁固定连接有第一电动推杆,两侧所述第一电动推杆顶部均通过安装板转动连接有第二电动推杆,右侧所述安装板侧壁固定连接有第一电机,所述第一电机输出轴端与第二电动推杆端部固定连接,还包括:
模拟定点组件,所述模拟定点组件设置在折弯板底部,模拟定点组件用于对影像检查的不同部位进行定点训练;
腰椎隆起组件,所述腰椎隆起组件设置在腰椎隆起组件上,腰椎隆起组件用于对影像检查时腰椎部位进行顶升辅助定位。
为了训练学员对人体影像检查部位的熟悉程度,优选地,所述模拟定点组件包括滑槽,所述滑槽与折弯板顶部固定连接,且所述滑槽折弯板中心对称设置有两个,左侧所述滑槽内转动连接有第一丝杆,所述折弯板侧壁固定连接有第二电机,所述第二电机输出轴端与第一丝杆端部固定连接,右侧所述滑槽内固定连接有定位滑杆,所述第一丝杆侧壁螺纹连接有第一滑块,所述定位滑杆侧壁滑动套接有第二滑块。
为了方便学员进行定位移动训练,进一步地,所述第一滑块与第二滑块之间转动连接有第二丝杆,所述第二滑块侧壁固定连接有第三电机,所述第三电机输出轴端与第二丝杆端部固定连接。
为了方便学员掌握影像检查高度,进一步地,所述第二丝杆侧壁螺纹连接有第三滑块,所述第三滑块底部固定连接有第三电动推杆,所述第三电动推杆底部固定连接有定点传感器。
为了提高定点传感器移动的稳定性,优选地,所述第三滑块上部侧壁贯穿有限位滑杆,所述限位滑杆两端分别与两侧滑槽侧壁固定连接。
为了方便将腰椎部位进行抬升,优选地,所述训练平台上端面中部开设有调节槽,所述腰椎隆起组件包括弹性板,所述弹性板与调节槽侧壁固定连接,所述调节槽底部转动连接有第三丝杆,所述训练平台侧壁固定连接有第四电机,所述第四电机输出轴端与第三丝杆端部固定连接,所述第三丝杆两侧均螺纹连接有顶压板。
为了获取更大的抬升力度,进一步地,所述弹性板底部设置有弧形凸起,所述第三丝杆中部固定连接有限位堵块,位于限位堵块两侧的所述第三丝杆螺纹为反向设置。
为了在抬升过程中保持训练假人手、腿部位的姿势,更进一步地,位于调节槽两侧的所述训练平台内分别开设有腿部定位槽和手部定位槽,所述顶压板侧壁分别固定连接有腿部定位杆和手部定位杆,所述腿部定位杆和手部定位杆分别伸入腿部定位槽和手部定位槽内,所述腿部定位杆和手部定位杆端部分别固定连接有腿部伸缩板和手部伸缩板,所述腿部伸缩板顶部固定连接有腿部夹持板,所述手部伸缩板顶部固定连接有手部夹持板。
为了方便改变训练假人的体位,优选地,左侧所述第二电动推杆顶部固定连接有脚底顶板,右侧所述第二电动推杆顶部固定连接有头顶弧板。
为了方便定点传感器的移动,优选地,所述训练平台底部两侧均转动连接有定位蜗轮,所述转轴侧壁设置有定位蜗杆,且所述定位蜗杆与定位蜗轮之间啮合连接。
与现有技术相比,本发明提供了一种医学影像检查模拟训练装置,具备以下有益效果:
1、该一种医学影像检查模拟训练装置,学员通过外部计算机终端控制第二电机、第三电机以及第三电动推杆的移动来进行影像检查点位的定位训练,如此方便学员对人体各个影像检查的器官进行了解,能够在长期的训练后,快速的对器官检查部位进行定位,以此来提高学员的影像检查水平,并且最终能够在计算机终端上反馈出此次定点操作下三维定位评分,方便学员掌握了解最佳检查点位所处部位,并在下一次的操作中通过三维定位数据进行操作细节的调整,从而来快速提升学员的影像检查水平。
2、该一种医学影像检查模拟训练装置,通过计算机终端控制第四电机带动第三丝杆进行转动,使得顶压板将弹性板向上顶起,从而模拟出将人体腰椎向上弯曲的状态,并且顶压板的移动还会带动两侧的腿部定位杆和手部定位杆移动,使得腿部与手部贴合在躯体两侧,以此使得训练假体的体位展现至最完美的检查状态,以此反复的训练,能够使得学员充分的了解腰椎骨密度影像检查是人体的最佳体位,方便影像仪器进行影像照射,从而能够提高学员后续实际操作中影像检查的准确性。
附图说明
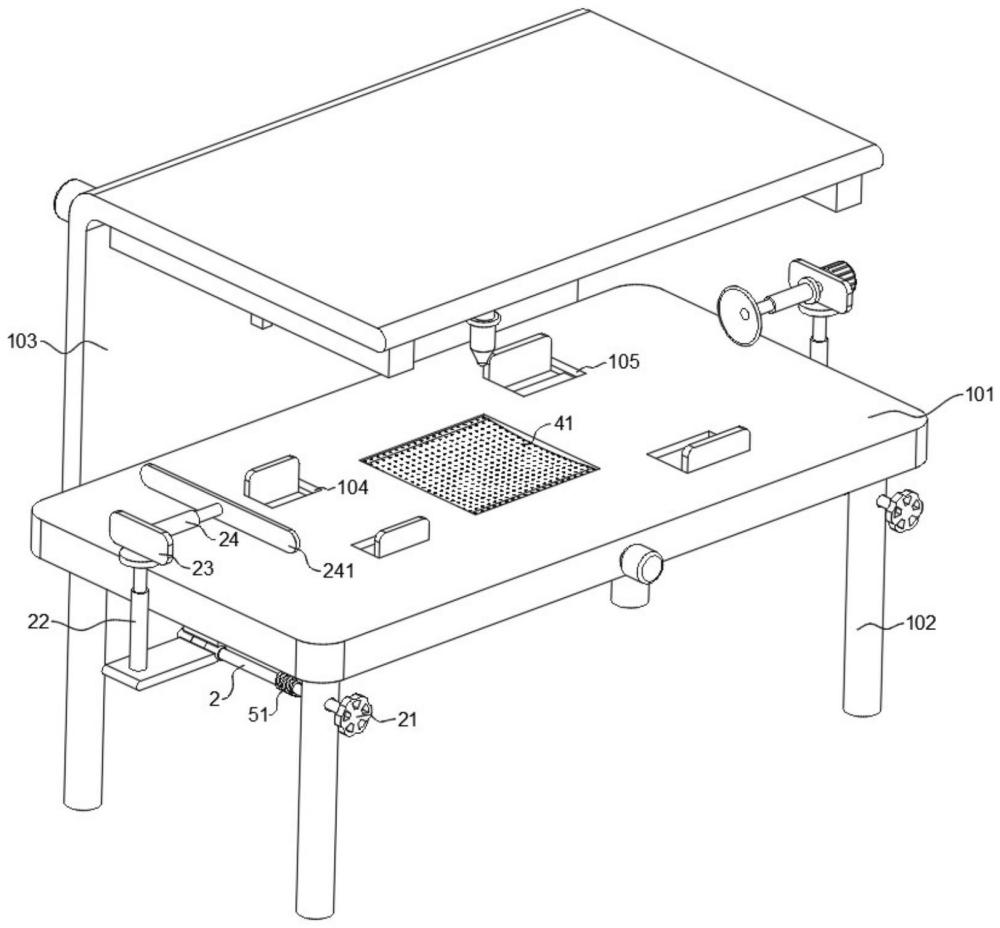
图1为本发明提出的一种医学影像检查模拟训练装置的主视整体结构示意图;
图2为本发明提出的一种医学影像检查模拟训练装置的侧视整体结构示意图;
图3为本发明提出的一种医学影像检查模拟训练装置的折弯板底部结构示意图;
图4为本发明提出的一种医学影像检查模拟训练装置的训练平台上端面结构示意图;
图5为本发明提出的一种医学影像检查模拟训练装置的训练平台半剖结构示意图;
图6为本发明提出的一种医学影像检查模拟训练装置的图5中局部放大结构示意图。
图中:1、训练平台;101、支撑腿;102、折弯板;103、调节槽;104、腿部定位槽;105、手部定位槽;2、转轴;21、转阀;22、第一电动推杆;23、安装板;24、第二电动推杆;241、脚底顶板;242、头顶弧板;3、模拟定点组件;31、滑槽;32、第一丝杆;33、定位滑杆;34、第一滑块;35、第二滑块;36、第二丝杆;37、第三滑块;371、限位滑杆;38、第三电动推杆;39、定点传感器;4、腰椎隆起组件;41、弹性板;42、第三丝杆;421、限位堵块;43、顶压板;431、腿部定位杆;432、手部定位杆;44、腿部伸缩板;441、腿部夹持板;45、手部伸缩板;451、手部夹持板;5、定位蜗轮;51、定位蜗杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例:
参照图1-图6,一种医学影像检查模拟训练装置,包括训练平台1,训练平台1底部四周均固定连接支撑腿101,训练平台1侧壁固定连接有折弯板102,训练平台1底部转动连接有转轴2,转轴2端部贯穿支撑腿101侧壁,且转轴2端部固定连接有转阀21,转轴2侧壁固定连接有第一电动推杆22,两侧第一电动推杆22顶部均通过安装板23转动连接有第二电动推杆24,右侧安装板23侧壁固定连接有第一电机,第一电机输出轴端与第二电动推杆24端部固定连接,还包括:
模拟定点组件3,模拟定点组件3设置在折弯板102底部,模拟定点组件3用于对影像检查的不同部位进行定点训练;
腰椎隆起组件4,腰椎隆起组件4设置在腰椎隆起组件4上,腰椎隆起组件4用于对影像检查时腰椎部位进行顶升辅助定位。
需要说明的是,第一电动推杆22、第二电动推杆24以及第一电机均与外部终端之间进行电性连接,以此方便学员在计算机终端进行操纵控制,且此为现有成熟技术,因此不在进行赘述;
参照图2、图3,其中,模拟定点组件3包括滑槽31,滑槽31与折弯板102顶部固定连接,且滑槽31折弯板102中心对称设置有两个,左侧滑槽31内转动连接有第一丝杆32,折弯板102侧壁固定连接有第二电机,第二电机输出轴端与第一丝杆32端部固定连接,右侧滑槽31内固定连接有定位滑杆33,第一丝杆32侧壁螺纹连接有第一滑块34,定位滑杆33侧壁滑动套接有第二滑块35;
参照图2、图3,其中,第一滑块34与第二滑块35之间转动连接有第二丝杆36,第二滑块35侧壁固定连接有第三电机,第三电机输出轴端与第二丝杆36端部固定连接;
参照图2、图3,其中,第二丝杆36侧壁螺纹连接有第三滑块37,第三滑块37底部固定连接有第三电动推杆38,第三电动推杆38底部固定连接有定点传感器39;
需要说明的是,第二电机、第三电机以及第三电动推杆38均与外部计算机终端之间进行电性连接,此为现有成熟技术,因此不在进行赘述;其中,定点传感器39也采用的是现有成熟技术;
通过上述结构的设置,可使学员利用计算机终端控制第二电机、第三电机以及第三电动推杆38的移动来进行影像检查点位的定位训练,如此方便学员对人体各个影像检查的器官进行了解,能够在长期的训练后,快速的对器官检查部位进行定位,以此来提高学员的影像检查水平,并且最终能够在计算机终端上反馈出此次定点操作下三维定位评分,方便学员掌握了解最佳检查点位所处部位,并在下一次的操作中通过三维定位数据进行操作细节的调整;
其中,三维定位数据包括第一丝杆32控制的纵向、第二丝杆36控制的横向以及第三电动推杆38控制的竖向。
参照图2,其中,第三滑块37上部侧壁贯穿有限位滑杆371,限位滑杆371两端分别与两侧滑槽31侧壁固定连接;
通过上述结构的设置,能够对定点传感器39的移动进行限位,使得定点传感器39在移动时处于平衡的状态,以此提高训练结果的精准性。
参照图4-图6,其中,训练平台1上端面中部开设有调节槽103,腰椎隆起组件4包括弹性板41,弹性板41与调节槽103侧壁固定连接,调节槽103底部转动连接有第三丝杆42,训练平台1侧壁固定连接有第四电机,第四电机输出轴端与第三丝杆42端部固定连接,第三丝杆42两侧均螺纹连接有顶压板43;
参照图5、图6,其中,弹性板41底部设置有弧形凸起,第三丝杆42中部固定连接有限位堵块421,位于限位堵块421两侧的第三丝杆42螺纹为反向设置;
需要说明的是,第四电机与外部计算机终端之间进行电性连接,此为现有成熟技术,因此不在进行赘述;
参照图4-图6,其中,位于调节槽103两侧的训练平台1内分别开设有腿部定位槽104和手部定位槽105,顶压板43侧壁分别固定连接有腿部定位杆431和手部定位杆432,腿部定位杆431和手部定位杆432分别伸入腿部定位槽104和手部定位槽105内,腿部定位杆431和手部定位杆432端部分别固定连接有腿部伸缩板44和手部伸缩板45,腿部伸缩板44顶部固定连接有腿部夹持板441,手部伸缩板45顶部固定连接有手部夹持板451;
通过上述结构的设置,通过计算机终端控制第四电机进行转动,从而带动第三丝杆42进行转动,而由于第三丝杆42的两侧螺纹相反设置,因此将会使得两侧的顶压板43同时向第三丝杆42中部移动,以此将会把弹性板41向上顶起,从而模拟出将人体腰椎向上弯曲的状态,并且在弹性板41向上顶起的过程中,顶压板43的移动还会同时带动两侧的腿部定位杆431和手部定位杆432移动,从而拉动腿部伸缩板44和手部伸缩板45向训练假体侧壁靠近,从而通过设置在训练假人两侧的腿部夹持板441和手部伸缩板45对训练假人的腿部和手部进行夹持,使得腿部与手部贴合在躯体两侧,以此使得训练假体的体位展现至最完美的检查状态,以此反复的训练,能够使得学员充分的了解腰椎骨密度影像检查是人体的最佳体位,方便影像仪器进行影像照射,从而能够提高学员后续实际操作中影像检查的准确性。
参照图1、图4,其中,左侧第二电动推杆24顶部固定连接有脚底顶板241,右侧第二电动推杆24顶部固定连接有头顶弧板242;
通过上述结构的设置,可使学员通过,通过计算机终端控制第一电动推杆22与第二电动推杆24的伸出,使得脚底顶板241与头顶弧板242和训练假人紧密贴合,对训练假人实现夹持并向上进行抬升,然后通过计算机终端控制第一电机的转动,使得训练假人进行翻转,从而很方便的将训练假人的体位调整至合适的部位,从而提高了该装置的训练效果。
参照图1、图2,其中,训练平台1底部两侧均转动连接有定位蜗轮5,转轴2侧壁设置有定位蜗杆51,且定位蜗杆51与定位蜗轮5之间啮合连接。
参照图1-图6,本发明中,在进行使用时,首先将训练假人(其内部各个能够进行影像检查的器官均安装了传感器)放在训练平台1上,此时在学员在计算机终端选取需要进行影像检查的部位,然后转动转阀21带动转轴2转动,使得第一电动推杆22旋转至垂直训练平台1的状态,使得第二电动推杆24处于平行训练平台1的状态,此时利用定位蜗杆51与定位蜗轮5之间的啮合自锁效果,将会使得转轴2不会自行发生转动,此时通过计算机终端控制第一电动推杆22与第二电动推杆24的伸出,使得脚底顶板241与头顶弧板242和训练假人紧密贴合,对训练假人实现夹持并向上进行抬升,然后通过计算机终端控制第一电机的转动,使得训练假人进行翻转,从而将训练假人的体位调整至合适的部位(待检查部分向上),此后控制第一电动推杆22与第二电动推杆24回缩,并将第一电动推杆22与第二电动推杆24旋转回收至训练平台1底部;此后,通过计算机终端控制第二电机、第三电机的转动,使得定点传感器39顺着第一丝杆32和第二丝杆36移动至待检查的部分上方,然后再通过计算机终端控制第三电动推杆38下移,将定点传感器39调整至合适的部分后停止所有操作,此时的定点传感器39将会自行捕捉训练假人内部的传感器信号,并最终在计算机终端上反馈出此次定点操作的准确性,如此方便学员对人体各个影像检查的器官进行了解,能够在长期的训练后,快速的对器官检查部位进行定位,以此来提高学员的影像检查水平;
同时,本装置还能特定的对腰椎骨密度影像检查进行训练,在进行检查时,将训练假人的面部调整至垂直向上的状态,然后通过计算机终端控制第四电机进行转动,从而带动第三丝杆42进行转动,而由于第三丝杆42的两侧螺纹相反设置,因此将会使得两侧的顶压板43同时向第三丝杆42中部移动,以此将会把弹性板41向上顶起,从而模拟出将人体腰椎向上弯曲的状态,以此方便影像仪器进行照射,并且在弹性板41向上顶起的过程中,顶压板43的移动还会同时带动两侧的腿部定位杆431和手部定位杆432一端,从而拉动腿部伸缩板44和手部伸缩板45向训练假体侧壁靠近,从而通过设置在训练假人两侧的腿部夹持板441和手部伸缩板45,对训练假人的腿部和手部进行夹持,使得腿部与手部贴合在躯体两侧,依次使得训练假体的体位展现至最完美的检查状态,以此反复的训练,能够使得学员充分的了解腰椎骨密度影像检查是人体的最佳体位,从而能够提高学员后续实际操作中影像检查的准确性。
需要说明的是,电机具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种具有智能电源管理功能的模拟训练装置
- 一种肺结节医学影像配准方法及其装置
- 一种超声检查用模拟训练装置
- 一种胃镜检查模拟训练辅助装置