一种用于舰船测速和测深的集成传感器
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及传感器技术领域,更具体的说是涉及一种用于舰船测速和测深的集成传感器。
背景技术
目前舰船一般都同时配置有电磁传感器和测深换能器,电磁传感器用于测量舰船速度,测深换能器用于测量舰船舰下深度,电磁传感器和测深换能器均必须与海水接触,这使得船底开孔数量变多,降低了舰船安全性。
电磁传感器工作时为低频电磁信号,测深换能器工作时为高频声脉冲信号,两者之间相互干扰小,不存在声兼容问题,具备集成化设计的条件。如将电磁传感器和测深换能器进行集成化设计,不仅可以减少船底开孔数量,提高舰船安全性;还便于船底导流设计,降低设备维护成本。
因此如何提供一种在减小船底开孔数量的前提下,既能测速又能测深的集成传感器是本领域技术人员亟需解决的问题。
发明内容
有鉴于此,本发明的目的是提供一种用于舰船测速和测深的集成传感器。其不仅可以减少船底开孔数量,提高舰船安全性;还便于船底导流设计,降低设备维护成本。
为了实现上述目的,本发明采用如下技术方案:一种用于舰船测速和测深的集成传感器,包括集成壳体、杆体、测深换能器、电磁传感器、把手、第一水密电缆和第二水密电缆;
所述测深换能器和所述电磁传感器均位于所述集成壳体的内部;
所述测深换能器通过穿设于杆体空腔内的第一水密电缆与外部通信连接;
所述电磁传感器通过穿设于杆体空腔内的第二水密电缆与外部通信连接;
所述集成壳体通过所述杆体与所述把手连接;
所述集成壳体与所述杆体固定连接;
所述把手与所述杆体固定连接。
优选的,所述集成传感器还包括卡箍座和卡箍;
所述第一水密电缆通过所述卡箍座、所述卡箍与所述杆体固定联接;
所述第二水密电缆通过所述卡箍座、所述卡箍与所述杆体固定联接。
优选的,所述卡箍座通过螺钉固定在杆体远离集成壳体的一端;第一水密电缆通过卡箍及螺钉固定在卡箍座上;
第二水密电缆通过卡箍及螺钉固定在卡箍座上。
优选的,所述测深换能器包括测深壳体、吸声橡胶和测深基阵;
所述吸声橡胶和所述测深基阵均位于所述测深壳体内;
所述测深基阵和所述测深壳体均采用硫化工艺进行包覆。
优选的,所述电磁传感器包括电磁壳体、励磁线圈组件、电极和电极板;
所述励磁线圈组件、电极和电极板均位于所述电磁壳体内;
所述电极板与所述电极固定连接;
所述电极板内设有定位槽,用于对所述励磁线圈组件进行定位。
优选的,所述电磁传感器包括四个电极;
所述四个电极组成两对电极,分别用于测量舰船的纵向对水速度和横向对水速度。
优选的,所述励磁线圈组件包括铁芯、内线圈和外线圈;所述铁芯采用内外双环形设计,工作时磁力线沿铁芯中心呈360°环绕。
优选的,所述电极板为碗状结构,碗外设有螺纹,所述电极板通过所述螺纹与所述电磁壳体固定联接。
优选的,所述集成壳体和所述测深壳体采用特氟龙喷涂工艺进行喷涂。
优选的,所述电磁壳体和所述电极板采用特氟龙喷涂工艺进行喷涂。
优选的,所述集成壳体与所述杆体之间采用密封圈进行密封。
优选的,所述集成壳体与测深换能器之间采用O形圈进行密封以及采用螺钉进行固定。
优选的,所述集成壳体与电磁传感器之间采用O形圈进行密封以及采用螺钉进行固定。
优选的,所述四个电极通过螺母固定在电极板上。
优选的,所述四个电极和电极板之间进一步通过环氧树脂进行粘结和固化。
优选的,所述电极板和所述电磁壳体之间进一步采用环氧树脂进行粘结和固化。
优选的,所述测深换能器的工作频率为218kHz。
优选的,所述第一水密电缆和所述测深换能器采用一体化设计,所述第一水密电缆和所述测深换能器的连接处采用硫化密封。
优选的,所述第二水密电缆和所述电磁传感器采用一体化设计,所述第二水密电缆和所述电磁传感器的连接处采用硫化密封。
优选的,所述测深换能器和电磁传感器的壳体外径相同,方便机加工的同时减少了O形圈的种类。
优选的,通过集成壳体与电极板上的刻线来实现电磁传感器艏艉向的定位。
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种用于舰船测速和测深的集成传感器,可以产生以下有益技术效果:
1:本发明提供的集成传感器不仅可以减少舰船开孔数量,提高舰船安全性;还便于船底导流设计,降低设备维护成本。
2:本发明在电磁传感器端面布置有两对电极,可分别测得舰船纵横两个方向的对水速度。
3:本发明集成传感器中的电磁传感器和测深换能器既可以同时工作也可以分别独立工作,方便实现电磁测速、声学测深的无缝切换。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
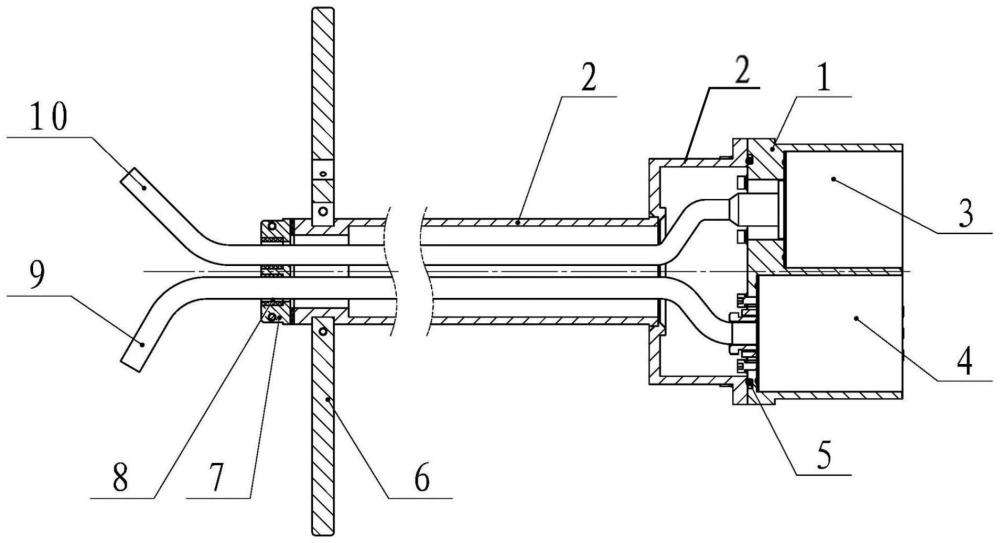
图1为本发明提供的集成传感器的剖视图;
图2为本发明提供的集成传感器的侧视图;
图3为本发明中测深换能器的剖视图;
图4为本发明中电磁传感器的剖视图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-4所示,本发明实施例公开了一种用于舰船测速和测深的集成传感器,包括集成壳体1、杆体2、测深换能器3、电磁传感器4、把手6、第一水密电缆9和第二水密电缆10;
所述测深换能器3和所述电磁传感器4均位于所述集成壳体1的内部;
所述测深换能器3通过穿设于杆体2空腔内的第一水密电缆9与外部的后端信号处理单元通信连接;
所述电磁传感器4通过穿设于杆体2空腔内的第二水密电缆10与外部的后端信号处理单元通信连接;
所述集成壳体(1)通过所述杆体(2)与所述把手(6)连接;
所述集成壳体(1)与所述杆体(2)固定连接;
所述把手(6)与所述杆体(2)固定连接。
进一步的,所述集成壳体(1)通过螺钉和定位销与所述杆体(2)连接;
所述把手(6)通过螺钉和定位销与所述杆体(2)连接;
进一步的,所述集成壳体1与所述杆体2之间采用密封圈5进行密封。
进一步的,所述集成传感器还包括卡箍座7和卡箍8;
所述第一水密电缆9通过所述卡箍座7、所述卡箍8与所述杆体2固定联接;
所述第二水密电缆10通过所述卡箍座7、所述卡箍8与所述杆体2固定联接。
进一步的,所述卡箍座7通过螺钉固定在杆体2远离集成壳体1的一端;
第一水密电缆9通过卡箍8及螺钉固定在卡箍座7上;
第二水密电缆10通过卡箍8及螺钉固定在卡箍座7上。
进一步的,所述测深换能器3包括测深壳体3-1、吸声橡胶3-2和测深基阵3-3;
所述吸声橡胶3-2和所述测深基阵3-3均位于所述测深壳体3-1内;
所述测深基阵3-3和所述测深壳体3-1均采用硫化工艺进行包覆,具备可靠的水密封;。
进一步的,所述电磁传感器4包括电磁壳体4-1、励磁线圈组件4-2、电极4-3和电极板4-5;
所述励磁线圈组件4-2、电极4-3和电极板4-5均位于所述电磁壳体4-1内;
进一步的,所述电磁传感器4包括四个电极4-3;
所述四个电极4-3组成两对电极,分别用于测量舰船的纵向对水速度和横向对水速度;
所述四个电极4-3通过螺母4-4固定在电极板4-5上;所述四个电极(4-3)和电极板4-5之间进一步通过环氧树脂进行粘结和固化。
进一步的,所述电极板4-5为碗状结构,碗外设有螺纹,所述电极板4-5通过所述螺纹与所述电磁壳体4-1固定联接;所述电极板4-5和所述电磁壳体4-1之间进一步采用环氧树脂进行粘结和固化。所述电极板4-5碗内设有定位槽,用于对所述励磁线圈组件4-2进行定位。
进一步的,所述励磁线圈组件4-2包括铁芯、内线圈和外线圈;所述铁芯采用内外双环形设计,工作时磁力线沿铁芯中心呈360°,可保证两对电极灵敏度的一致性。
进一步的,所述集成壳体1、所述测深壳体3-1、所述电磁壳体4-1和所述电极板4-5均采用特氟龙喷涂工艺进行喷涂;其不仅可以保证传感器壳体的绝缘性,还可以在使用中有效阻止海生物的生长和附着,提高测量结果的准确性。
进一步的,所述集成壳体1与测深换能器3之间采用O形圈进行密封以及采用螺钉进行固定。
所述集成壳体1与电磁传感器4之间采用O形圈进行密封以及采用螺钉进行固定。
进一步的,通过集成壳体1与电极板4-5上的刻线来实现电磁传感器4艏艉向的精确定位。
进一步的,所述测深换能器3的工作频率为218kHz。
进一步的,所述第一水密电缆9和所述测深换能器3采用一体化设计,所述第一水密电缆9和所述测深换能器3的连接处采用硫化密封。
进一步的,所述第二水密电缆10和所述电磁传感器4采用一体化设计,所述第二水密电缆10和所述电磁传感器4的连接处采用硫化密封。
本发明的工作过程:
本发明提供的集成传感器须匹配后端信号处理单元进行传感器的励磁、发射、信号放大和滤波才能解算出速度信息和深度信息。电磁传感器与测深换能器共用同一个信号处理单元,分别通过第一水密电缆和第二水密电缆上的电连接器与信号处理单元相连。
集成传感器中的电磁传感器工作时基于法拉第电磁感应定律,电磁传感器的低频励磁电流(由后端信号处理单元提供)作用于传感器的内置线圈使其产生交变磁场,当舰船航行时,相对运动的海水切割线圈产生的磁力线,从而产生与舰船速度成正比的电势信号,该电势信号被两对电极拾取,一对拾取纵向电势信号,另一对拾取横向电势信号,然后通过后端信号处理单元对电势信号进行放大、滤波处理,从而解算出舰船的对水速度。
集成传感器中的测深换能器工作时基于声学原理,换能器是一种机械能和电能相互转换的收发合置型元件,换能器把发射机生产的功率电信号转换为声波信号向海底辐射,声波遇水层或海底产生反射,反射回来的声波被换能器接收,换能器将声波信号接收后转换为电信号送给接收机,然后通过后端信号处理单元解算出船舰下深度。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种用于船舶对水测速的杆式平面集成传感器
- 一种用于舰船测速的两维电磁和声学集成的测速传感器
- 一种用于舰船测速的两维电磁和声学集成的测速传感器